Изобретение относится к области авиации в отрасли вертолетостроения, авиационной технике, а именно к устройствам компенсации реактивного момента несущего винта вертолета, к конструкциям рулевых винтов, служащих для компенсации реактивного момента несущего винта и путевого управления вертолетом.
Известно, что вертолеты содержат фюзеляж, несущий винт, установленный на верхней центральной части фюзеляжа, и рулевой хвостовой винт для компенсации крутящего момента, передаваемого от несущего винта к фюзеляжу.
Среди вертолетов одновинтовой схемы с механическим приводом несущего винта наибольшее количество составляют аппараты с рулевым винтом в качестве средства обеспечения путевой балансировки и управления. Рулевой винт, имеющий поперечную ось, располагают на длинной хвостовой балке. Эту схему называют (классической), поскольку она нашла наибольшее применение на практике благодаря своим достоинствам.
Известен рулевой винт вертолета, который имеет изменяемый шаг винта, лопасти которого одновременно изменяют шаг винта для корректировки положения хвостовой балки вертолета.
В патентных документах США №2,387,617 и 2010/012309 описаны вертолеты с рулевым винтом, снабженными лопастями с фиксированным углом наклона и приводимыми во вращение электродвигателем. В патентном документе США №8,464,980 описано использование электродвигателя для вращения приводного вала рулевого винта. В патентном документе США №2009/0140095 описано использование электродвигателя для вращения рулевого винта вертолета. В патентном документе США №2013/0264412 описано использование электродвигателя для вращения приводного вала и использование регулирующих средств, функционально расположенных между электродвигателем и рулевым винтом и предназначенных для регулирования углов установки лопастей рулевого винта. Указанные регулирующие средства содержат блок памяти и вычислительный блок.
Вместе с тем, рулевой винт обладает рядом серьезных недостатков. В вертолете угол атаки рулевого винта меняется и меняется тяга всего диска ометаемого лопастями винта. При переходе через нулевой угол атаки импульс от тяги винта сдвигает хвостовую балку до того момента, пока не произойдет изменение угла атаки в другую сторону и не появится обратная тяга, сдвигающая хвостовую балку в другую сторону. При нулевом угле атаки лопастей рулевого винта диск винта превращается в поверхность на которую воздействует ветровая нагрузка, приводящая к сносу, повороту хвостовой балки, при неподвижной ручке управления в руках пилота.
Затраты мощности для парирования реактивного момента несущего винта составляют 8-11% мощности, потребной для вращения несущего винта на режиме висения. При разворотах на висении, особенно на статическом потолке, и режимах вертикального подъема затраты могут составлять 16-20% и более. При этом нижней границе диапазона соответствует меньшее значение нагрузки на диск рулевого винта, что приводит к росту его диаметра и значительному увеличению его массы.
Как известно, рулевой винт является источником звуковых колебаний. Создаваемая рулевым винтом тяга мала по сравнению с аналогичной для несущего винта, однако частота создаваемых им колебаний выше. Человеческое ухо более восприимчиво к высокочастотным колебаниям. Поэтому уменьшение шума, создаваемого рулевым винтом, становится одной из главных задач при снижении общего уровня шума.
Недостатком аналогов является невозможность компенсации вектором тяги большой инерционности хвостовой части фюзеляжа вертолета с рулевым винтом. Вектор тяги рулевого винта вертолета всегда направлен в одну сторону или равен нулю, но в этот момент, когда происходит смена вектора тяги рулевого винта, хвостовая часть продолжает движение по инерции или дополнительно под действием реактивного момента несущего винта вертолета. И при смене вектора тяги рулевого винта сначала необходимо компенсировать инерционное движение хвостовой части, а уже потом остановить хвостовую часть в необходимом положении, что приводит опять к смене направления инерционного движения хвостовой части вертолета.
Для более точного регулирования необходима частая смена направления вектора тяги рулевого винта, а когда хвостовая часть вертолета установлена в нужном положении, любое возмущающее воздействие, к примеру, такие как увеличение инерционного момента, порыв бокового ветра, наклон фюзеляжа вертолета, ее смещает, поскольку тяга рулевого винта мала, компенсирует только инерционный момент и направлена в одну сторону.
Рулевой винт является источником периодических возбуждений, передаваемых на конструкцию. Нагружение рулевого винта отличается существенной нестационарностью воздействия внешних сил, что обусловлено влиянием периодических пульсаций вихревой пелены от несущего винта.
В настоящее время не существует расчетных методов, способных с достаточной долей точности рассчитать условия нагружения рулевого винта. Все это уменьшает срок службы рулевого винта и элементов трансмиссии. При увеличении удельной нагрузки на несущий винт относительный размер рулевого винта увеличивается, что приводит к росту массы всей системы компенсации вращающего момента и удержания хвостовой балки в нужном направлении.
Рулевой винт обладает небольшим запасом по срыву, а ко всему прочему, работает на околосрывных режимах в условиях эксплуатации на предельных высотах с максимальной нагрузкой. Предельная скорость установившегося разворота на висении определяется параметрами нагружения рулевого винта. Увеличение заполнения рулевого винта (узнать) ведет к значительному росту нагрузки в системе управления. Рост окружной скорости приводит к существенному увеличению шума, создаваемого рулевым винтом.
В статье Семенович А.Н. в журнале «Вертолетная индустрия» за апрель 2008 года «Попасть на вращение» впервые обнародованы увеличивающиеся потери одновинтовых вертолетов из-за случаев «непроизвольных, неуправляемых« левых вращений на режимах близких к висениям. Одновинтовой вертолет начинает неуправляемого вращаться влево только тогда, полная правая педаль не может остановить (парировать) это движение. В большинстве случаев это происходит из-за образования на хвостовом винте вихревого кольца по своей физике точно подобного вихревому кольцу (т.е. воздушному вихревому тору) на несущем винте, только в перпендикулярной по отношению к несущему винту плоскости. В этом случае, мощность, потребляемая хвостовым винтом, уходит на создание силы и момента против вращения фюзеляжа, как реакции на прилагаемые к нему усилия двигателей, а на вращение массы воздуха в кольцевом торе и поэтому ее не хватает собственно для путевого управления.
На многих американских конструкциях конструктивно завалена плоскость вращения рулевого винта на весьма заметное число градусов, для предотвращения образования вихревого кольца на хвостовом рулевом винте вертолета.
На режиме обдувки справа или развороте влево для несущего винта левого вращения вертолет становится статически неустойчивым, так как потребный для равновесия шаг рулевого винта увеличивается, особенно для рулевого винта с движением нижней лопасти назад. При этом потребное значение угла установки лопастей рулевого винта может достигнуть предельных значений при большой боковой скорости. Такая особенность поведения рулевого винта обусловлена влиянием на рулевой винт вихревой пелены от несущего винта. При этом перемещения педалей путевого управления требуют увеличения угла установки рулевого винта, что является обратной реакцией по отношению к естественному уменьшению угла установки на этих режимах.
Влияние этого явления будет тем сильнее, чем больше нагрузка на несущий винт. Кроме того, подобная путевая неустойчивость проявляется в различной угловой скорости вертолета при развороте с постоянным положением педалей в зависимости от угла скольжения. В целом выполнение разворотов на висении в условиях ветра заметно усложняется по сравнению со штилем.
Существуют достаточно жесткие летные ограничения по угловой скорости разворота вертолета на висении, определяемой темпом отклонения педалей, а по существу - скоростью изменения шага рулевого винта, а также угловой скоростью рыскания. Они обусловлены неблагоприятным для динамической прочности и ресурса лопастей возрастанием нагружения рулевого винта. Развороты одновинтового вертолета на висении разрешается выполнять с угловой скоростью 10-20 градусов в секунду, причем большие цифры соответствуют вертолетам типа Ми-2. Для вертолета Ми-34 предельная скорость разворота составляет около 60 град/сек. Соответственно отклонения педалей в сторону разворота должны быть плавными, а при изменении направления вращения не следует допускать полного перемещения педалей быстрее, чем за 3 секунды.
Поэтому развороты в любую сторону на любой угол с предельно допустимой скоростью разрешены только при скорости приземного ветра не более 5 м/сек.
Недостатком вертолета с рулевым винтом является также существенная зависимость балансировочного положения педалей путевого управления от режимов полета, а значит и положений рычагов управления общим и циклическим шагом. На переходных режимах полета это требует постоянных компенсирующих перемещений органами управления, в частности, педалей рулевого винта, что утомляет пилота. Перекрестные связи в различных каналах управления существенно усложняют управление.
Исследования, проведенные армией США, показали, что рулевые винты являются причиной 10% инцидентов на вертолетах. Во время боевых действий во Вьетнаме армия США потеряла 256 вертолетов из-за выхода из строя рулевого винта при задевании за различные препятствия или поломке трансмиссионного вала. Кроме того, наличие рулевого винта повышает опасность для наземного персонала, уязвимость и массу конструкции, затрудняет обслуживание, уменьшает живучесть, осложняет продольную центровку и компоновку.
Известна так же система без хвостового винта по патенту US №4948068 (заменяющая хвостовой винт) - система типа NOTAR вертолета MD-600N заимствована с зарекомендовавшей себя системы вертолета MD-520N. Принцип работы системы NOTAR предельно простой. Она состоит из встроенного вентилятора, хвостовой балки с управляемой циркуляцией; створки управления вектором тяги и горизонтального стабилизатора с двумя управляемыми килями. Туннельный вентилятор в системе NOTAR имеет 13 лопаток изменяемого угла установки и привод от трансмиссии НВ через повышающий редуктор. Угол установки лопаток вентилятора управляется пилотом педалями. Вентилятор подает воздушный поток низкого давления в хвостовую балку, частично, образующий циркуляцию через щели в балке. Основной выдув через поворотную створку обеспечивает компенсацию крутящего момента и управление по курсу. Направленная циркуляция воздушного потока в хвостовой балке действует как вертикальная аэродинамическая поверхность, создающая подъемную силу, противодействующую крутящему моменту НВ при висении. Подъемная сила создается за счет НВ, направляющего воздушный поток на правую часть балки (компенсирующую крутящий момент благодаря воздуху, выходящему из щелей.). Вентилятор NOTAR обеспечивает выдув приблизительно постоянного расхода из щелей на всех режимах полета. Боковая сила парирования крутящего момента, создаваемая циркуляцией хвостовой балки, прямо пропорциональна крутящему моменту: при большом крутящем моменте от НВ подается больший объем воздушного потока, приводящий к увеличению парирующего эффекта. При меньшем крутящем моменте выдув невелик и хвостовая балка создает меньший парирующий эффект. Стабилизатор на MD-600N имеет фиксированный угол установки и расположен над хвостовой балкой, перед поворотной створкой. На каждом конце стабилизатора располагается вертикальный киль. Правый и левый киль соединены с педалями управления. Отклоняясь на угол примерно 30 градусов, кили обеспечивают управление курсом в прямолинейном полете. Они дополнительно разгружают поворотную створку в прямолинейном полете, что обеспечивает оптимальную управляемость.
Поворотная створка располагается в задней части хвостовой балки и состоит из внешнего цилиндра с вырезанным сектором, вращающегося вокруг внутреннего цилиндра. Внутренний цилиндр имеет фиксированные лопатки, при совпадении с которыми вырезанный сектор внешнего цилиндра регулирует объем и направление выдува воздушного потока из балки. Изменяемый суммарный вектор тяги от струй выдува создает дополнительный парирующий эффект и управление курсом.
При этом крутящий момент компенсируется 80% хвостовой балкой с щелями и 20% хвостовой «бочкой». Основным преимуществом данной системы является отсутствие хвостового рулевого винта и как следствие низкий акустический шум.
Недостатком является то, что увеличивается потребная мощность для привода вентилятора и преодоление потерь при выдуве и распределении потока воздуха. При низкой скорости полета вертолет становится очень чувствительным по курсовым углам из-за снижения эффективности работы килей, при боковом ветре с углов в 80…190 градусов. Результаты расчетных и экспериментальных данных, полученных на летающей лаборатории, на базе вертолета Ка-26, изложенные в докладе С.В. Михеева и Э.А. Петросяна на конференции ЦАГИ в 1987 г., показали высокую энергозатратность работы струйного устройства порядка 2-25% от мощности двигателей на основных режимах полета. Кроме того, в ходе летных исследований выявились проблемы, обусловленные нестабильностью характеристик суперциркуляционного обтекания хвостовой балки и как следствие - недостаточности управляемости вертолета.
Основной недостаток системы NOTAR - он боится пыли. Подвижные части соплового аппарата могут заедать. Это ограничивает использование вертолета в пустынях и на площадках с высокой растительностью и кустарниками.
Среди получивших распространение систем обеспечения путевой балансировки и управления применяются винт в кольце (или фенестрон). Фенестрон представляет собой винт в профилированном кольцевом канале с поперечной осью. На режиме висения реакция вертолета на дачу педалей становится несимметричной, однако это малозаметно. Впервые применен на вертолете французского производства SA-341 "Gazelle", совершившем первый полет в апреле 1968 года.
Известен рулевой винт вертолета, установленный в туннеле по патенту RU 2538497 С1, заявка 2013153401/11 от 03.12.2013. Рулевой винт создает силу тяги, необходимую для компенсации крутящего момента несущего винта и путевого управления вертолетом.
Рулевой винт вертолета установленный в туннеле, который имеет профилированную входную, цилиндрическую и выходную части, состоящий из статора, внутри которого закреплен редуктор с входным валом и выходным валом, на котором установлена втулка с закрепленными на ней лопастями, неподвижных лопаток спрямляющего аппарата, установленных наклонно к поверхности туннеля и закрепленных одним концом на поверхности цилиндрической части туннеля, а другим на статоре, содержит двенадцать лопастей, установленных в два ряда, таким образом, что второй ряд лопастей расположен в цилиндрической части туннеля на определенном расстоянии от первого ряда, с определенными угловые расстояния между ближайщими лопастями. Опоры лопаток спрямляющего аппарата на цилиндрической поверхности туннеля расположены симметрично относительно оси входного вала, а крепление каждой из лопаток к статору смещено по отношению крепления той же лопатки к поверхности туннеля в направлении по часовой стрелке со стороны профилированной входной части туннеля. Этим достигается снижение шума от рулевого винта.
Подобная система имеет высокую чувствительность к величине зазора между концами лопастей и внутренней поверхностью туннеля. С увеличением зазора резко падает коэффициент полезного действия устройства. Данное устройство имеет более высокий уровень шума по сравнению с классическим рулевым винтом. Одна из причин этого заключается во взаимодействии лопастей винта с внутренней поверхностью туннеля устройства. Это взаимодействие приводит к возникновению переменного давления на стенках туннеля. Эта же причина приводит к появлению дополнительных по сравнению с классическим рулевым винтом вибраций на фюзеляже. Центробежные силы вращающихся лопастей неуравновешены. Суммарная, вращающаяся вместе с лопастями, неуравновешенная центробежная сила передается на хвостовую часть вертолета.
Таким образом, в данной отрасли существует необходимость в рулевом винте вертолета, характеризующееся высокой эффективностью, поскольку необходима максимизация, насколько это возможно, точности и воспроизводимости регулирования углов установки лопастей для улучшения управления рулевым винтом, и маневренности вертолета в целом.
В качестве прототипа выбрано «Устройство компенсации реактивного момента несущего винта вертолета», описанное в патенте RU 2263609 С1 (заявка 2004109707/11, 01.04.2004).
Устройство содержит винт с несколькими лопастями, установленными в туннеле хвостового киля вертолета, привод и систему управления лопастями винта. На концы лопастей установлено кольцо, соединенное с ними с возможностью радиального перемещения кольца относительно лопастей и изменения угла установки лопастей. Для обеспечения плавности течения воздуха в туннеле, контур кольца профилирован соответствующим образом.
К основным недостаткам подобной системы следует отнести:
- сложность конструкции и обслуживания, большую массу;
- на режиме висения потребная мощность составляет не менее 12.5% от мощности, потребной для привода несущего винта. При разворотах на висении, особенно на статическом потолке, и режимах вертикального подъема затраты могут составлять 16-20% и более;
- при увеличении нагрузки на несущий винт значительно увеличивается размер фенестрона. Следовательно, применение фенестрона эффективно на легких и средних вертолетах массой до 5 тонн. А на малых скоростях полета фенестрон уступает рулевому винту по энергетическому совершенству, что уменьшает статический потолок и вертикальную скороподъемность вертолета;
- невозможность компенсации вектором тяги большой инерционности хвостовой части фюзеляжа вертолета.
Целью данного изобретения является создание устройства компенсации реактивного момента несущего винта вертолета, выполненного с удовлетворением требования иметь вектор тяги устройства компенсации направленный в противоположные стороны. Предлагаемое устройство имеет постоянный вектор тяги для компенсация реактивного момента от несущего винта, а поддержание заданного положения хвостовой части фюзеляжа вертолета обеспечивается соотношением противоположно-направленных векторов тяги от устройства компенсации реактивного момента. В направлении компенсации реактивного момента несущего винта вектор тяги имеет запас и превосходит вектор тяги устройства в противоположном направлении, что позволяет обеспечивать путевую управляемость.
Технической задачей предлагаемого изобретения является увеличение управляемости вертолета, обеспечение надежной компенсации реактивного момента несущего винта вертолета, уменьшение энергетических затрат на привод устройства компенсации, увеличение коэффициента полезного действия, снижение нагрузки на устройство компенсации, эффективное управление заполнением плоскости диска хвостового винта для создания вектора тяги устройства компенсации реактивного момента несущего винта, снижение скорости вращения лопастей хвостового винта устройства компенсации реактивного момента, снижение уровня шума, уменьшение вибраций и увеличение ресурса устройства компенсации реактивного момента несущего винта вертолета.
Технический результат изобретения достигается тем, что известное устройство, компенсации содержащее винт с несколькими лопастями, установленный в туннеле киля, привод и систему управления винта. Диск вращения винта разделен на две зоны. Внутренний диск винта с лопастями, снабженный установленным на концы лопастей внутренним профилированным кольцом, с возможностью изменения угла установки лопастей и внешний диск винта с лопастями, которые снабжены внешним профилированным кольцом. Во внутреннем диске винта оси вращения лопастей закреплены во втулке винта и во внутреннем профилированном кольце, а во внешнем диске винта оси вращения закреплены на внешней стороне внутреннего профилированного кольца, а законцовки лопастей закреплены во внешнем профилированном кольце с возможностью вращения. При этом получается, что каждая лопасть винта устройства компенсации функционально разделена на две части, имеющие разные соосные оси вращения, и при этом комлевая часть лопасти расположена между втулкой винта и внутренней стороной профилированного кольца, с внешней стороны которого расположены хвостовые части лопасти винта устройства компенсации, оси вращения которых проходят через внутреннее профилированное кольцо и лопасти внутреннего диска винта. Законцовка лопастей винта во внешнем диске закреплена во внешнем профилированном кольце с возможностью вращения для изменения угла установки лопастей.
Внешняя поверхность второго внешнего профилированного кольца, вращается в профилированном канале туннеля киля. Комлевые части лопастей, которые закреплены на втулке винта устройства компенсации, имеют возможность вращения и управляются электронно-управляемым механизмом изменения угла установки лопастей. Хвостовые части лопастей, расположенные во внешнем диске винта, между профилированным кольцом и внешним профилированным кольцом, имеют оси вращения, соосные и проходящие через оси вращения комлевых частей лопастей, с возможностью вращения и управляются другим электронно-управляемым механизмом изменения угла установки лопастей.
В предлагаемом техническом решении, управление от разных механизмов изменения шага позволяет создавать вектор тяги различной величины и направления на внутреннем диске внутри профилированного кольца и на внешнем диске винта, располагающемся между профилированным кольцом и внешним профилированным кольцом. При этом комлевая часть лопасти внутри первого кольца будет по длине лопасти и по площади больше хвостовой части лопасти из-за меньшей скорости вращения.
Величина вектора тяги для компенсации реактивного момента несущего винта меняется в зависимости от скорости вращения несущего винта. Для обеспечения путевого управления и улучшения управляемости, вектора тяги частей диска винта могут складываться и иметь одинаковую величину или разную в зависимости от угла установки лопастей. Наличие профилированных колец обеспечивает конструктивную прочность за счет равномерного перераспределения нагрузки на все оси вращения, предотвращает срыв потока с хвостовой законцовки части лопастей, что обеспечивает снижение шума и предотвращает вихреобразование на законцовках лопастей.
Для снижения шума и повышения эффективности количество лопастей во внутреннем диске винта устройства компенсации и внешнем может быть различным. Во внутреннем диске лопасти вращаются медленнее, а во внешнем с большей скоростью, что позволяет, при разных углах атаки лопастей добиваться равенства величины вектора тяги в зонах диска винта устройства компенсации реактивного момента несущего винта вертолета. В этом случае оси лопастей во внешнем диске могут не проходить через оси вращения лопастей во внутреннем диске из-за разного их количества.
Оси вращения лопастей могут быть не параллельны передним и задним кромкам, а по диагонали: от передней кромки к задней, что позволяет формировать воздушный поток в виде конуса. От внутреннего и внешнего диска винта он формируется с вершиной конуса на оси втулки винта, но с разных сторон при разнонаправленном векторе тяги.
Для управления электронно-управляемыми механизмами изменения шага лопастей винта устройства присутствует блок автоматического управления, который воспринимает сигналы: с одной стороны от педалей и ручки управления в кабине пилота, а с другой стороны от датчиков скорости движения хвостовой балки всего вертолета относительно оси вращения несущего винта, скорости вращения несущего винта, и от датчиков скорости вращения лопастей винта устройства компенсации реактивного момента, от датчиков положения угла установки лопастей во внешнем и внутреннем диске устройства компенсации.
Для выработки управляющих сигналов, пропорциональных положению педалей с требуемой скоростью углового перемещения киля хвостовой балки вертолета, блок автоматического управления обрабатывает сигналы от всех датчиков и рассчитывает требуемые углы установки лопастей.
Управляющие сигналы меняются для корректировки положения хвостовой балки вертолета. Тяга отдельных частей диска винта устройства различная для компенсации внешнего воздействия.
При автоматическом управлении углы атаки могут складываться для увеличения импульса тяги и резко разделяться на противоположные в зависимости от скорости перемещения ручки управления, скорости перемещения хвостовой балки. Сформирована связь между скоростью перемещения ручки управления и величиной и направлением тяги винта устройства компенсации реактивного момента несущего винта вертолета.
При увеличении числа лопастей возможно двухрядное их размещение по разные стороны редуктора привода рулевого винта вертолета с индивидуальными приводами и разными скоростями вращения и разными электронно-управляемыми механизмами изменения угла положения лопастей винта устройства компенсации реактивного момента несущего винта вертолета.
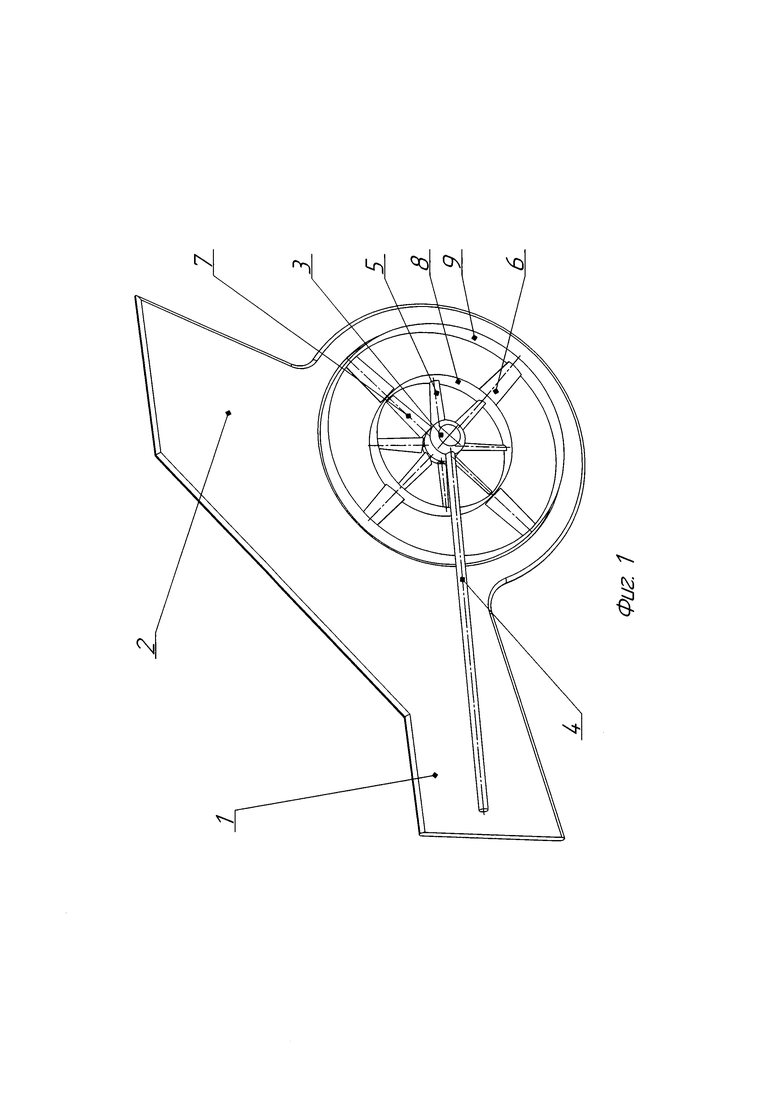
Изобретение поясняется чертежами, где на фиг. 1 представлена часть килевой балки вертолета и киль с устройством компенсации реактивного момента.
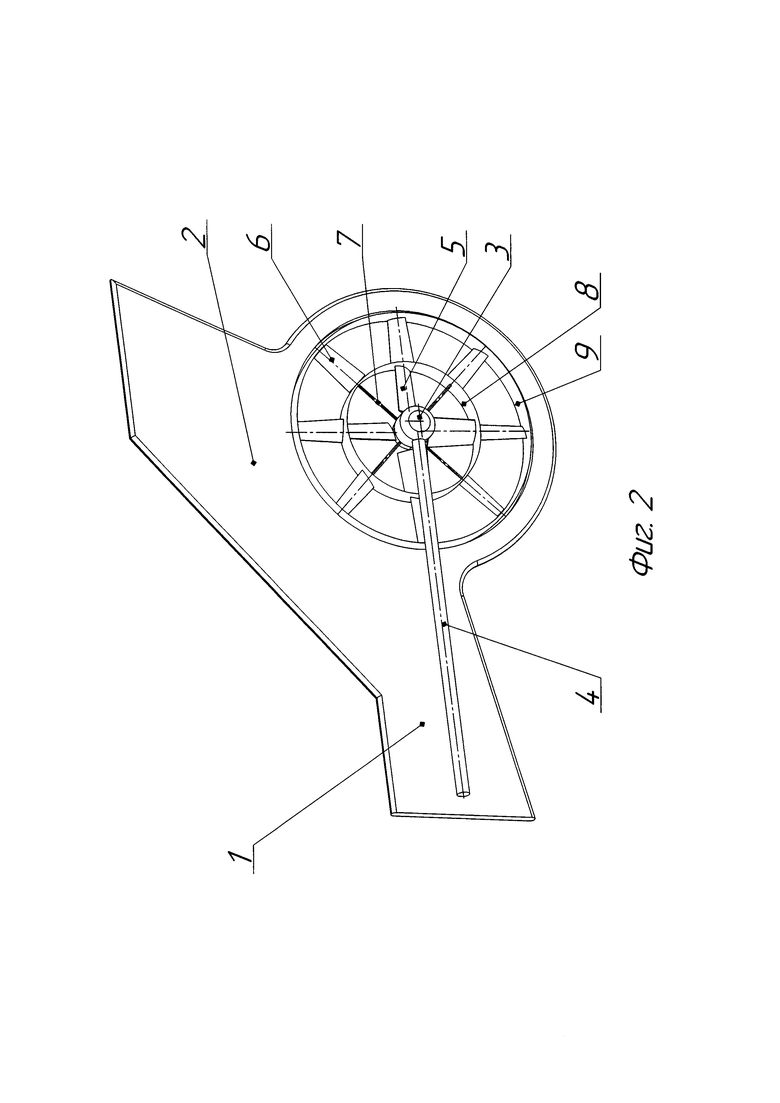
На фиг. 2 показан возможный вариант взаимного расположения лопастей винта устройства компенсации реактивного момента несущего винта вертолета.
Согласно представленным чертежам (фиг. 1, фиг. 2) устройство компенсации реактивного момента несущего винта вертолета включает следующие элементы:
1 - хвостовая балка;
2 - киль;
3 - втулка;
4 - вал;
5 - лопасть;
6 - лопасть;
7 - ось вращения;
8 - внутреннее профилированное кольцо;
9 - внешнее профилированное кольцо.
Устройство компенсации реактивного момента несущего винта вертолета (фиг. 1) расположено на конце хвостовой балки 1 в пределах киля 2. Устройство состоит из винта с лопастями 5 и 6, с втулкой 3, в которой располагается редуктор привода винта, который с помощью вала 4 соединен с коробкой приводов вертолета. Внутренний диск винта с лопастями 5 снабжен установленным на концы лопастей внутренним профилированным кольцом 8. Лопасти 5 с осями вращения 7 установлены с возможностью изменения угла установки лопастей. Внешний диск винта с лопастями 6, снабжен внешним профилированным кольцом 9. Во внутреннем диске винта оси вращения 7 лопастей 5 закреплены во втулке винта 3 и во внутреннем профилированном кольце 8, а во внешнем диске винта оси вращения 7 лопастей 6, проходят через внутреннее профилированное кольцо 8, через оси вращения 7 лопастей 5 и закреплены одним концом во втулке 3, а другим концом во внешнем профилированном кольце 9. Оси вращения 7 лопастей 5 и 6, закрепленные во втулке винта 3 устройства компенсации, имеют возможность вращения для изменение шага и управляются электронно-управляемым механизмом изменения угла установки лопастей (не показан). Для управления электронно-управляемыми механизмами изменения угла установки лопастей имеется блок автоматического управления (не показан), который имеет подключение к педалям, ручкам управления и ко всем датчикам на вертолете.
На фиг. 2 показан винт с разным количеством лопастей 5 и 6. Внешняя поверхность второго внешнего профилированного кольца 9, вращается в профилированном канале туннеля киля 1. Комлевые части лопастей 5 с осями вращения 7, которые закреплены на втулке винта 3 устройства компенсации, имеют возможность вращения и управляются электронно-управляемым механизмом изменения угла установки лопастей (не показан). Хвостовые части лопастей 6, расположенные во внешнем диске винта между профилированным кольцом 8 и внешним профилированным кольцом 9, имеют оси вращения 7, соосные и проходящие через оси вращения 7 комлевых частей лопастей 5, или непосредственно до втулки 3, с возможностью вращения и управляются другим электронно-управляемым механизмом изменения угла установки лопастей (не показан).
Для управления электронно-управляемыми механизмами изменения шага лопастей 5 и 6 винта устройства присутствует блок автоматического управления (не показан), который воспринимает сигналы: с одной стороны от педалей и ручки управления в кабине пилота, а с другой стороны от датчиков скорости движения хвостовой балки 1, всего вертолета относительно оси вращения несущего винта, скорости вращения несущего винта, и от датчиков скорости вращения винта устройства компенсации реактивного момента, от датчиков положения угла установки лопастей 5 и 6 во внешнем и внутреннем диске устройства компенсации.
Работа устройства компенсации реактивного момента несущего винта вертолета состоит в следующем. Часть мощности двигателя вертолета в виде крутящего момента через приводной вал 4 вращает втулку 3 с лопастями 5 и 6, которые засасывают воздух в тоннель между профилированными кольцами 8 и 9 и втулкой 3. На вращающихся лопастях 5 и 6 создается разрежение и в результате образуется тяга лопастей. Воздух разгоняется и выбрасывается из туннелей.
Поскольку угол установки лопастей 5 и 6 может периодически меняться по времени, то и скорости воздуха и силы тяги будут переменны, в зависимости от величины реактивного момента несущего винта вертолета. Противоположная направленность и величина тяги лопастей 5 и 6 обеспечивают требуемую схему компенсации реактивного момента несущего винта вертолета. Инерционное движение хвостовой балки 1 компенсируется изменением величины тяги лопастей 5 или 6 устройства. Два вектора тяги, один из которых компенсирует реактивный момент несущего винта, как бы упираются друг в друга, и если появляется стороннее воздействие с той или с другой стороны, то автоматически увеличивается вектор тяги для компенсации этого воздействия.
Направленность вектора тяги может плавно изменяться от противоположного до однонаправленного, что позволяет трансформировать устройство в обычный рулевой винт по величине и направлению тяги. В этом случае все свойства рулевого винта реализуются в данном устройстве компенсации реактивного момента несущего винта вертолета для обеспечения путевой управляемости и устойчивости.
На режиме висения, устройство компенсации реактивного момента несущего винта вертолета создает максимальную силу тяги, необходимую для уравновешивания реактивного момента несущего винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
| ВЕРТОЛЕТ И СПОСОБ УПРАВЛЕНИЯ ОДНОВИНТОВЫМ ВЕРТОЛЕТОМ | 2002 |
|
RU2238221C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2004 |
|
RU2263609C1 |
| ВОЗДУШНЫЙ ВИНТ С УПРАВЛЯЕМЫМИ ЗАКОНЦОВКАМИ ЛОПАСТЕЙ | 2021 |
|
RU2788116C1 |
| ВЕРТОЛЕТ | 2003 |
|
RU2246426C1 |
| СИСТЕМА КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЁТА | 2003 |
|
RU2245821C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
| УСТРОЙСТВО ДОПОЛНИТЕЛЬНОЙ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2005 |
|
RU2281226C1 |
Изобретение относится к области авиации, в частности к конструкциям рулевых винтов вертолетов. Устройство компенсации реактивного момента несущего винта вертолета содержит хвостовой винт, установленный в туннеле киля, с несколькими лопастями, на концы которых установлено кольцо, соединенное с ними с возможностью радиального перемещения и изменения угла установки лопастей, привод и систему управления шагом лопастей. Диск винта разделен на две части профилированным кольцом, при этом каждая лопасть винта разделена на две части, имеющие разные соосные оси вращения. Комлевая часть лопасти расположена между втулкой винта и внутренней стороной профилированного кольца, с внешней стороны которого расположены хвостовые части лопасти винта, оси вращения которых проходят через комлевые части лопасти винта, хвостовая часть лопастей закреплена во внешнем профилированном кольце, внешняя часть которого вращается в профилированном канале туннеля. Обеспечивается возможность на одном диске винта создавать одновременно вектор тяги, направленный в противоположные стороны, при задании разных углов установки лопастей в разных частях диска винта, улучшая управляемость вертолета, снижая уровень шума и вибрации. 5 з.п. ф-лы, 2 ил. 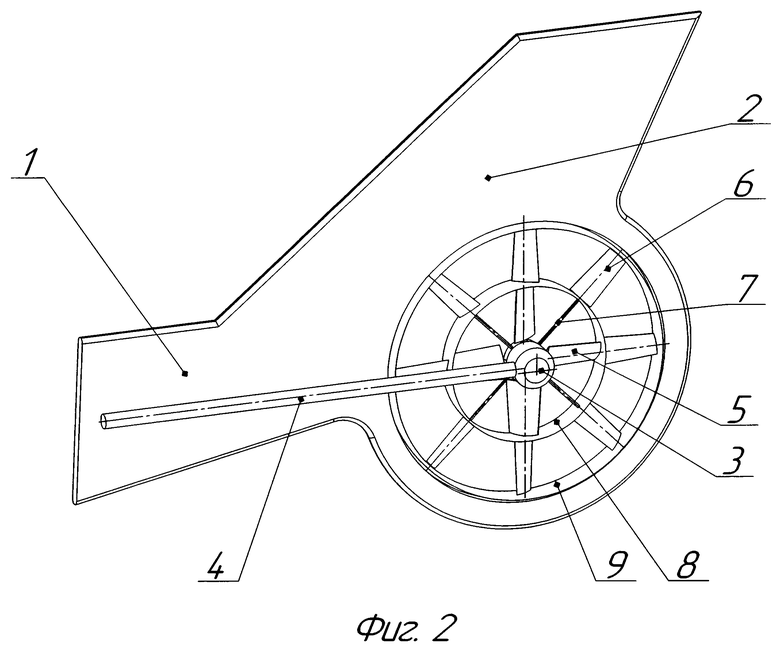
1. Устройство компенсации реактивного момента несущего винта вертолета, содержащее хвостовой винт с несколькими лопастями, на концы которых установлено кольцо, соединенное с ними с возможностью радиального перемещения и изменения угла установки лопастей, установленный в туннеле киля, привод и систему управления шагом лопастей, отличающееся тем, что диск винта разделен на две части профилированным кольцом, при этом каждая лопасть винта разделена на две части, имеющие разные соосные оси вращения, и при этом комлевая часть лопасти расположена между втулкой винта и внутренней стороной профилированного кольца, с внешней стороны которого расположены хвостовые части лопасти винта, оси вращения которых проходят через комлевые части лопасти винта, при этом хвостовая часть лопастей закреплена во внешнем профилированном кольце, внешняя часть которого вращается в профилированном канале туннеля, что позволяет на одном диске винта создавать одновременно вектор тяги, направленный в противоположные стороны, при задании разных углов установки лопастей в частях диска винта.
2. Устройство компенсации реактивного момента несущего винта вертолета по п. 1, отличающееся тем, что количество лопастей винта устройства компенсации может быть различным для обеспечения требуемой величины вектора тяги различных частей винта устройства компенсации реактивного момента несущего винта вертолета.
3. Устройство компенсации реактивного момента несущего винта вертолета по п. 1, отличающееся тем, что оси вращения лопастей винта могут быть не параллельны передним или задним кромкам и проходить по диагонали от передней кромки к задней, что позволяет формировать воздушный поток в виде конуса с вершиной на оси вращения втулки винта устройства, но с разных сторон при разнонаправленном векторе тяги.
4. Устройство компенсации реактивного момента несущего винта вертолета по п. 1, отличающееся тем, что каждая часть диска винта устройства с лопастями управляется отдельным электронно-управляемым механизмом изменения угла установки лопастей.
5. Устройство компенсации реактивного момента несущего винта вертолета по п. 1, отличающееся тем, что лопасти винта расположены в два ряда, при этом один ряд лопастей внутреннего диска винта, а другой ряд лопастей внешнего диска винта, имеющие разный привод и разные скорости вращения, с управлением от отдельных электронно-управляемых механизмов изменения угла установки лопастей.
6. Устройство компенсации реактивного момента несущего винта вертолета по п. 3, отличающееся тем, что электронно-управляемые механизмы изменения угла установки лопастей винта и привода лопастей частей диска винта управляются от блока автоматического управления, который воспринимает сигналы: с одной стороны от педалей и ручки управления в руках пилота, с другой стороны от датчиков движения хвостовой балки всего вертолета относительно оси вращения несущего винта, скорости вращения несущего винта, направления движения вертолета, скорости движения вертолета, скорости вращения лопастей винта устройства, угла установки лопастей каждой части винта устройства компенсации реактивного момента несущего винта вертолета и управляет скоростью вращения лопастей в разных частях диска винта, выдает сигналы для изменения угла установки лопастей.
| РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА, УСТАНОВЛЕННЫЙ В ТУННЕЛЕ | 2013 |
|
RU2538497C1 |
| US 5096382 A1, 17.03.1992 | |||
| US 20170029091 A1, 02.02.2017 | |||
| DE 102011117542 A1, 08.05.2013 | |||
| ОПТИЧЕСКИ ОСВЕТЛЕННЫЕ ЛАТЕКСЫ | 2019 |
|
RU2799333C2 |

