Настоящее изобретение относится к летательным аппаратам (далее ЛА), в частности к ЛА с возможностью вертикального взлета и посадкой (СВВП) и/или с возможностью вертикального взлета/вынужденной посадкой с укороченным пробегом, предназначенного для перевозки людей или грузов.
В настоящее время одним из самых распространенных видов СВВП является вертолет. Вертолеты используются для вертикального взлета и посадки. Вертолет способен приземлиться и взлететь в любом месте, где есть подходящая площадка. Однако для обеспечения взлета и посадки данным ЛА требуется несущий винт (НВ) большого диаметра, создающий подъемную силу. Угловая скорость вращения НВ вертолета существенно ниже угловой скорости вращения вала силовой установки, что приводит к использованию тяжелых трансмиссий между НВ и двигателем. Более того, большой диаметр НВ требует систему управления и тщательный подбор площадки для посадки для предотвращения столкновении лопастей с препятствиями. Также вертолеты подвергаются значительным вибрационным нагрузкам. По этим причинам вертолеты имеют сложную конструкцию. Реактивный момент НВ должен уравновешиваться либо хвостовым винтом, либо другим несущим винтом, что еще больше увеличивает конструктивную сложность ЛА.
Еще одним известным видом СВВП являются конвертопланы. Данный вид ЛА сочетает в себе вертикальный взлет и посадку с возможностью горизонтального полета благодаря повороту винтов из вертикального положения в горизонтальное и наличию крыльев, создающих подъемную силу в горизонтальном полете. Однако сложные и громоздкие механические системы для управления изменением положения винтов ведут к увеличению сложности и веса ЛА, а также большей трудоемкости обслуживания. При посадке требуется тщательный подбор большой свободной от препятствий площадки.
Другими широко известными СВВП являются ЛА, использующие либо тягу турбореактивных двигателей (ТРД) для поддержки самолета во время взлета и посадки (например, Як-141, Boeing X-32 JSF), либо использующие тягу ТРД в сочетании с тягой высокооборотного канального вентилятора, обеспечивающие вертикальный взлет и посадку (например, Lockheed-Martin X-35). Скорость струи, создаваемой ТРД или подъемным высокооборотным канальным вентилятором, обеспечивающей получение подъемной силы - от 870 км/ч для подъемного вентилятора и до 2200 км/ч для ТРД, при этом температура нисходящей струи реактивного двигателя может достигать 680°С. Производить взлет и посадку данные виды ЛА могут только с площадок с прочным покрытием. Управление потоками воздуха этих ЛА усложняет их конструкцию и эксплуатацию, а также требует подготовленной посадочной площадки с прочным покрытием.
Таким образом, существует потребность в создании СВВП, менее сложной конструкции, более надежных, с меньшими требованиями к посадочной площадке, при этом подходящих для перевозки людей или грузов. Для решения этих задач были разработаны различные СВВП, некоторые из которых приведены ниже.
Известен СВВП (US 10414491 B2, МПК B64C 27/20, B64C 29/00, опубл. 17.09.2019), имеющий грузовой или пассажирский отсек, прикрепленный снизу к интегральному крылу, вмещающим в себя несколько двигателей, приводящих во вращение набор воздушных винтов, при этом под интегральным крылом на пилонах расположена маршевая силовая установка, состоящая из двух двигателей.
Недостатками такой компоновки является необходимость стоек шасси большого размера, создающих дополнительное аэродинамическое сопротивление и имеющих значительную массу, при этом в случае применения убирающихся стоек шасси, несмотря на снижение аэродинамического сопротивления, масса таких шасси будет еще большей.
Кроме того, для изменения положения винтов из горизонтального положения в вертикальное требуется механическая система, которая сложна и может иметь значительный вес. Отказ такой механической системы может сделать управление самолетом невозможным.
Известен многороторный ЛА (US 2020115045 A1, МПК B64C 29/00, B64D 27/24, опубл. 16.04.2020) использующий для движения только электродвигатели, или с гибридной силовой установкой, использующий для движения как электродвигатели, так и двигатели внутреннего сгорания (ДВС), выполненный по схеме тандем с верхним расположением переднего и заднего крыльев, создающих большую часть подъемной силы в горизонтальном полете, и с продольным размещением подъемных винтов, создающих большую часть подъемной силы, необходимой ЛА при взлете и посадке, установленных на пилонах, прикрепленных к неподвижным крыльям. ЛА имеет две продольные соединительные балки, к которым крепится пассажирский или грузовой отсек, кроме того ЛА управляется автоматикой.
Недостатком данного решения является сложность обеспечения прочности развитой пространственной конструкции ЛА при желании сделать ее легкой, кроме того вся масса крыльев, воздушных винтов и соединительных элементов опирается на пассажирский (грузовой) отсек. Этот отсек должен выдержать все приходящие на него нагрузки и передать их при посадке на устройства шасси. В результате исполнение и самих шасси, и пассажирского (грузового) отсека будут более габаритными и тяжелыми, а большое расстояние между крыльями, воздушными винтами и шасси приведет к усложнению конструкции за счет большого количества узлов крепления. Также расположение винтов, размещенных в каналах, в непосредственной близости от передней кромки крыльев ЛА ведет к нестабильности набегающего воздушного потока, что приводит к снижению подъемной силы, создаваемой крыльями, а также к ухудшению управляемости.
Известен СВВП с неподвижным крылом (US 8636241 B2, МПК B64C 15/02, опубл. 28.01.2014), содержащий планер, включающий фюзеляж и крылья обратной стреловидности, трапециевидное переднее горизонтальное оперение, заднее горизонтальное оперение прямой стреловидности, два газотурбинных двигателя, создающие тягу вдоль строительной горизонтали аппарата и приводящие в действие устройства электрической генерации, множество вентиляторов с электроприводом, создающих подъемную силу, при этом ЛА взлетает, приземляется и зависает благодаря подъемным вентиляторам с электроприводом, а для полета вперед использует газотурбинные двигатели.
Недостатком данного решения для высокоскоростного аппарата такой компоновки является сложность размещения взлетных винтов большой мощности в профиле крыльев малой толщины.
Известен ЛА (US 8393564 B2, МПК B64C 27/22, опубл. 12.03.2013), включающий в себя фюзеляж, переднее и заднее крыло, соединенные с фюзеляжем, несколько несущих винтов, расположенных вдоль правого и левого бортов фюзеляжа, для подъема и управления во время взлета, перехода в горизонтальный полет, а также посадки, с двумя или более воздушными винтами для создания тяги для горизонтального полета.
Данный ЛА выбран прототипом, так как максимально полно решает выявленные проблемы других СВВП, однако также имеет недостаток: для восприятия и передачи нагрузки на шасси от крыльев, взлетных и маршевых винтов и их силовых установок, например при приземлении, фюзеляж и шасси должны иметь значительную прочность и, как следствие, массу. Это в свою очередь ведет к снижению грузоподъемности ЛА. При недостаточной прочности произойдет разрушение фюзеляжа и гибель экипажа или полезной нагрузки.
Таким образом, в настоящее время существует необходимость в создании СВВП для обеспечения эффективных и безопасных грузовых и пассажирских перевозок при использовании неподготовленных или небольших взлётно-посадочных полос, с возможностью упрощения конструкции ЛА.
Целью изобретения является создание эффективного, безопасного и простого многороторного СВВП, способного использовать неподготовленные или небольшие взлётно-посадочная полосы.
Техническим результатом, на достижение которого направлено изобретение, является создание СВВП с улучшенной грузоподъемностью, а именно с полезной нагрузкой не менее 20% от общей массы ЛА, при одновременном увеличении энергоэффективности, дальности и продолжительности горизонтального полета, а именно не менее 5-ти часов, за счет использования формы и конструкции фюзеляжа.
Заявленные технические результаты достигаются созданием летательного аппарата, содержащего фюзеляж, крылья, вертикальное оперение, шасси, систему управления, силовую установку, винтомоторную группу, состоящую по крайней мере из 8-ми взлетных винтов, управляемых по скорости вращения, каждый из которых приводится во вращение отдельным взлетным электродвигателем, и по меньшей мере из одного маршевого винта для создания горизонтальной движущей силы, приводящегося во вращение маршевым двигателем, при этом летательный аппарат имеет схему тандемного расположения крыльев, а фюзеляж имеет уплощенный силовой каркас, при этом взлетные винты имеют одинаковый диаметр в диапазоне 1,5-2,8 м.
Силовой каркас фюзеляжа имеет конструкцию с поперечными лонжеронами и продольными балками, усиленными профилями, а в качестве материалов элементов конструкции используются металлические сплавы и композиционные материалы.
Фюзеляж содержит сквозные каналы, в пределы которых полностью встроена винтомоторная группа для создания вертикальной подъемной силы, при этом сквозные каналы винтомоторной группы выполнены с возможностью перекрытия воздухонепроницаемыми заслонками, а заслонки выполнены в виде шарнирно смонтированных двухэлементных створок.
Винтомоторная группа для создания вертикальной подъемной силы расположена в два параллельных продольных ряда.
Также консоли крыльев закреплены на силовом каркасе фюзеляжа со стороны боковых обтекателей.
Вертикальное оперение закреплено на силовом каркасе в задней части фюзеляжа и выступает вверх.
При этом маршевый двигатель установлен на мотораме, смонтированной на силовом каркасе в задней части фюзеляжа.
Фюзеляж содержит пассажирский и/или грузовой отсек, при этом фюзеляж дополнительно может содержать кабину с экипажем.
Сущность изобретения и его преимущества по отношению к прототипу раскрываются более подробно в контексте следующего описания варианта осуществления, приведенного в качестве иллюстрации и со ссылкой на прилагаемые фигуры, на которых:
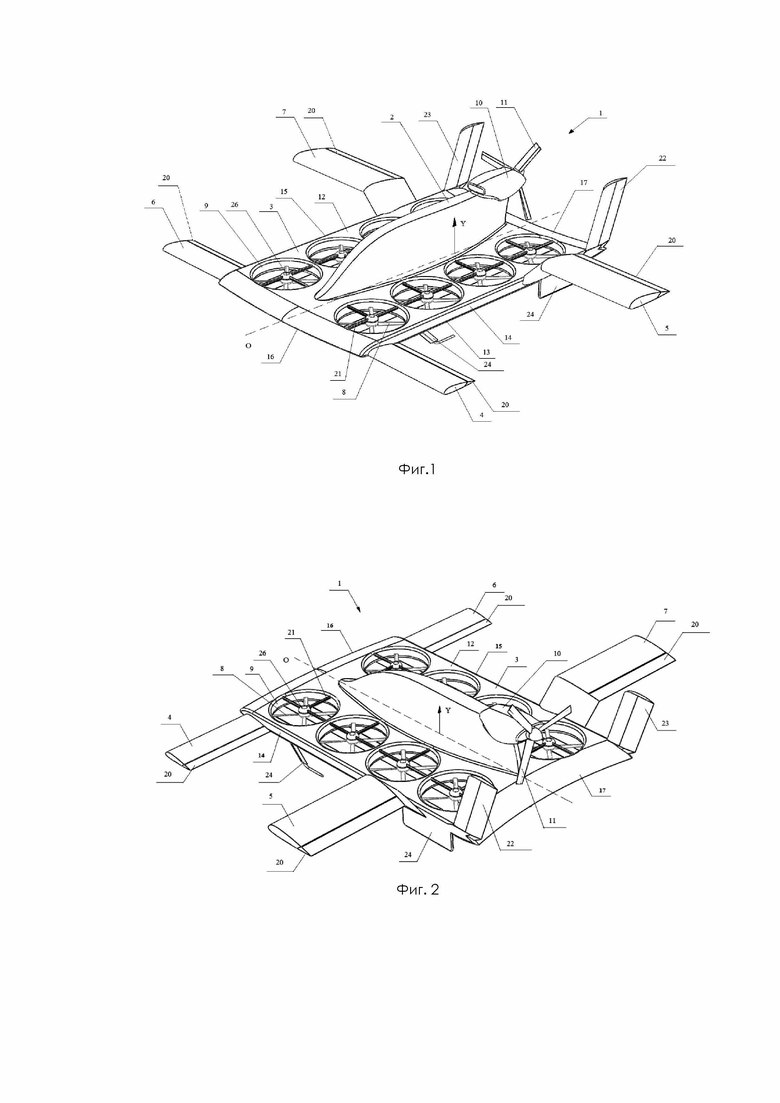
Фиг. 1 - изометрический вид спереди СВВП;
Фиг. 2 - изометрический вид сзади СВВП;
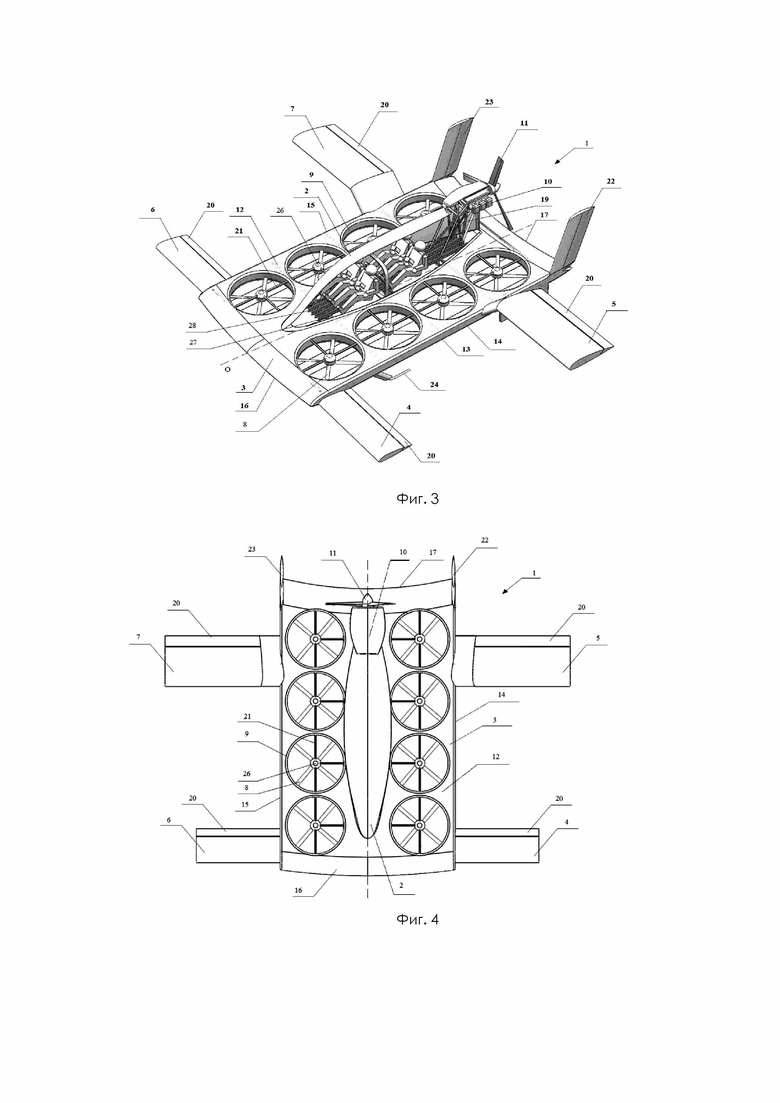
Фиг. 3 - вид устройства СВВП;
Фиг. 4 - вид сверху СВВП;
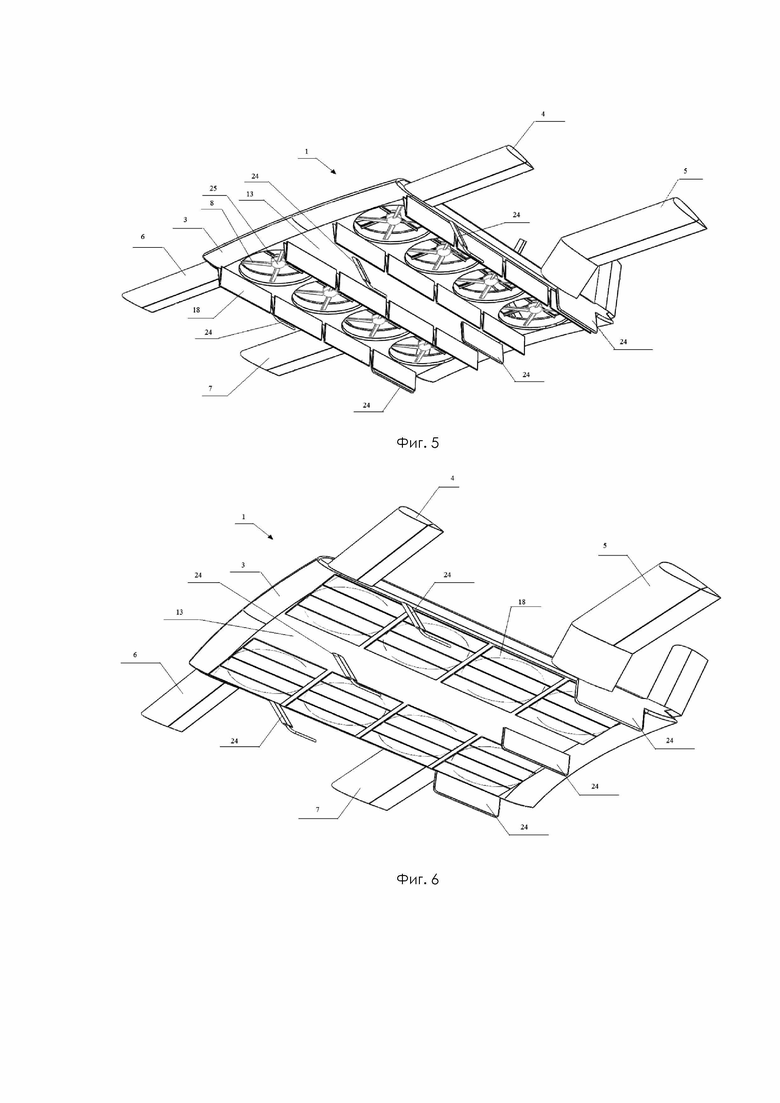
Фиг. 5 - вид снизу СВВП с открытыми устройствами перекрытия каналов во время фазы вертикального взлета и посадки;
Фиг. 6 - вид снизу СВВП с закрытыми устройствами перекрытия каналов во время горизонтальной фазы полета;
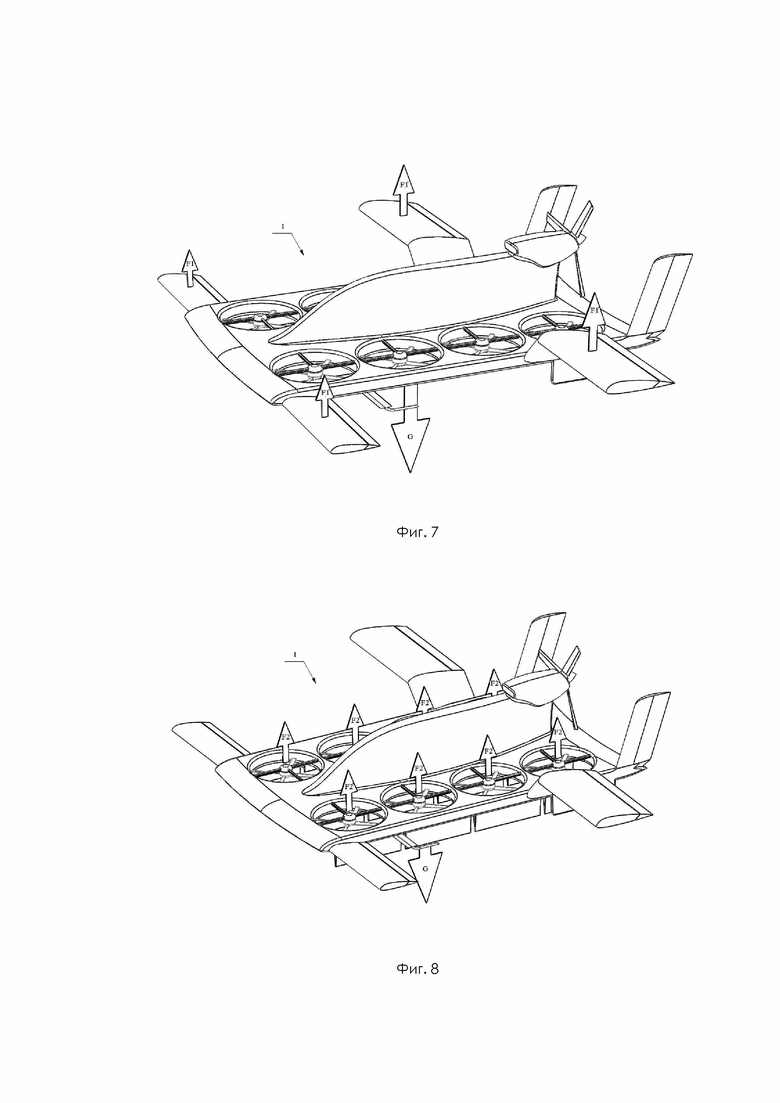
Фиг. 7 - схема направления действия сил, возникающих во время горизонтального полета;
Фиг. 8 - схема направления действия сил, возникающих во время вертикального взлета и посадки.
На Фиг. 1-3 изображена продольная ось симметрии О, а также вертикальная ось Y. Ось симметрии О проходит от задней части ЛА к передней части ЛА.
На Фиг. 1 и 2 изображен вариант выполнения СВВП (1) в изометрической проекции, содержащего фюзеляж (3), а также два крыла, содержащие передние консоли (4), (6) и задние консоли (5), (7). Фюзеляж (3) содержит винтомоторную группу (ВМГ), которая состоит из восьми электродвигателей (26) с взлетными винтами (8), расположенными в соответствующих сквозных каналах (9), а также мотораму (19) (см. фиг. 3), на которой установлен маршевый двигатель (10) и маршевый винт (11).
Фюзеляж (3) содержит пассажирский и/или грузовой отсек (2), который расположен и вытянут вдоль оси симметрии О, при этом плавно сопряжен с верхней (12) обшивкой фюзеляжа (3).
В другом варианте выполнения фюзеляж (3), помимо пассажирского и/или грузового отсека (2), дополнительно содержит кабину с экипажем.
Отсек (2) имеет обтекаемую форму, то есть имеет округлое поперечное сечение и плавные изгибы, дающие наименьшее лобовое сопротивление при обтекании ЛА набегающими потоками воздуха.
На Фиг. 3 видно, как в отсеке (2) размещаются пассажиры.
Силовой каркас фюзеляжа (3) имеет балочно-лонжеронную конструкцию с поперечными лонжеронами (27) и продольными балками, усиленными профилями (28) (см. фиг. 3). Поверхность фюзеляжа (3) состоит из верхнего (12) и нижнего (13) участков обшивки, боковых обтекателей (14), (15), а также обтекателей передней (16) и задней (17) кромки. Обтекатели кромок (16), (17) имеют меньшие поперечные размеры, чем продольные размеры обтекателей (14), (15).
На Фиг. 4 видно, что обтекатели кромок (16), (17) выполнены округлыми, однако могут быть выполнены прямыми, или стреловидными. Также обтекатели кромок (16), (17) профилированы для уменьшения сопротивления встречного воздушного потока во время горизонтального полета ЛА.
Фюзеляж (3) имеет уплощенный силовой каркас с обшивкой. Упрощенно форму фюзеляжа можно представить в форме параллелепипеда. Другим вариантом выполнения фюзеляжа (3) может быть силовой каркас с обшивкой, при этом верхний участок (12) обшивки выполнен выпуклым в направлении оси Y, а нижний участок (13) образует горизонтальную плоскость. Фюзеляж (3) может иметь и другие варианты выполнения обтекаемой формы. То есть фюзеляж (3), вкупе с силовым каркасом и обшивкой, имеет обтекаемую форму, снижающую сопротивление и способную создавать дополнительную подъемную силу, уменьшая потребную площадь крыльев, снижая тем самым сопротивление и увеличивая дальность и продолжительность горизонтального полета, а именно не менее 5-ти часов, по сравнению с другими многороторными СВВП. Также за счет обтекаемой формы фюзеляжа (3) повышается энергоэффективность СВВП, поскольку это позволяет увеличить дальность и продолжительность горизонтального полета СВВП без необходимости увеличения объема авиационного топлива. Участки (12), (13) обшивки плавно сопряжены с боковыми обтекателями (14), (15), а также с обтекателями передней (16) и задней (17) кромки фюзеляжа (3).
Наличие прочного фюзеляжа (3) обеспечивает жесткую взаимосвязь между консолями крыльев (4)-(7), ВМГ, маршевым двигателем (10), тем самым воспринимая и распределяя нагрузки, которым ЛА подвергается в полете, за счет формы фюзеляжа (3) и силового каркаса. Заявленная конструкция фюзеляжа (3) позволяет достичь кратчайшего расстояния между консолями крыльев (4)-(7), ВМГ, маршевым двигателем (10) и стойками шасси (24), уменьшив тем самым габариты СВВП, а также позволив избавится от узлов крепления и упростить конструкцию. Благодаря этому уменьшилась масса СВВП, что в свою очередь позволило увеличить грузоподъёмность. Опытным путем было установлено, что значение полезной нагрузки СВВП при такой конфигурации фюзеляжа (3) может достигать 20% от общей массы СВВП.
Также конструкция фюзеляжа (3) может поглотить энергию столкновения с землей при аварийной посадке за счет своей деформации, уменьшив травматизм экипажа.
Фюзеляж (3) имеет сквозные каналы (9) для восьми взлетных винтов (8) ВМГ. Каналы (9) встроены в фюзеляж (3) и расположены вертикально. Каналы (9) расположены симметрично относительно продольной вертикальной плоскости симметрии ЛА, таким образом двухрядное их расположение минимизирует общие габариты ЛА и задает форму фюзеляжа (3). Каналы имеют одинаковые размеры, а именно не менее 1,4 м и не более 2,9 м, и являются круглыми. Каждый канал имеет торообразную верхнюю кромку. Каналы служат для защиты лопастей взлетных винтов (8) от столкновения с различными объектами, что позволяет данному СВВП использовать площадки менее подготовленные для взлета и посадки, чем обычные взлетно-посадочные полосы, а также снижают аэродинамическое сопротивление.
Размещение взлетных винтов (8) ВМГ в фюзеляже (3) позволяет использовать более легкую конструкцию консолей крыльев (4)-(7).
На фиг. 5 и 6 видно, что сквозные каналы (9) оборудованы воздухонепроницаемыми шарнирно смонтированными заслонками (18), которые могут быть раздвигающимися и одновременно попарно складывающимися в поперечном направлении двухэлементными створками. Заслонки (18) препятствуют перетеканию воздуха сквозь каналы ВМГ во время горизонтального полета, позволяя снизить сопротивление, а также повысить несущую способность фюзеляжа (3).
Боковые обтекатели (14), (15) фюзеляжа (3) скрывают от набегающего потока воздуха узлы крепления консолей (4)-(7).
Консоли крыльев (4)-(7) закреплены на силовом каркасе фюзеляжа (3) со стороны боковых обтекателей (14), (15). Вынос консолей крыльев (4)-(7) ЛА на боковые обтекатели (14), (15) фюзеляжа (3) снижает влияние на них работающих ВМГ, что позволяет снизить их геометрические размеры, тем самым снизить их вес.
Данная схема расположения крыльев (тандем) позволяет отказаться от наличия хвостового горизонтального оперения, что в свою очередь ведет к уменьшению массы и габаритов ЛА, соответственно увеличению грузоподъемности, а также увеличивает его энергоэффективности в горизонтальном полете.
На фиг. 7 проиллюстрированы силы, возникающие в горизонтальном полете, где G - сила тяжести, устремленная вниз, а F1 - подъемные силы, создаваемые крыльями, противодействующие силе тяжести G.
Для производства элементов конструкции ЛА могут быть использованы металлические сплавы и композиционные материалы.
На силовом каркасе в задней части фюзеляжа (3), симметрично относительно оси О, ближе к обтекателю задней кромки (17), крепится моторама (19), показанная на фиг. 3. На мотораме (19) жестко закреплен маршевый двигатель (10) с маршевым винтом (11). Моторама (19) воспринимает силы и моменты, создаваемые винтом (11) во время горизонтального полета ЛА.
Консоли крыльев (4)-(7) выполнены с элевонами (20). Элевоны (20) позволяют управлять креном и тангажем ЛА.
В предпочтительном варианте конструкции ЛА ВМГ состоит из восьми взлетных винтов (8) с лопастями, каждый из которых установлен на ступице (25) отдельной силовой установки в виде взлетного электродвигателя (26), при этом взлетные электродвигатели (26) поддерживаются пилонами (21), смонтированными на усиленных узлах стенок сквозных каналов (9) фюзеляжа (3).
Взлетные винты (8) имеют фиксированный шаг с вертикально расположенными осями вращения, образуя ряд, состоящий из 4-х взлетных винтов (8), при этом ряды расположены симметрично относительно продольной вертикальной плоскости симметрии. Взлетные винты (8) ВМГ полностью встроены в пределы соответствующих сквозных каналов (9). Взлетные винты (8) имеют одинаковые диаметры в диапазоне 1,5-2,8 м. Опытным путем было установлено, что заявленный диапазон диаметра взлетных винтов (8) позволяет обеспечивать вертикальный взлет с полезной нагрузкой не менее 20% от общей массы ЛА, при этом скорость взлета достигает 5 м/с.
Относительно небольшие габариты ВМГ позволяют иметь меньший момент инерции вращающегося винта, а следовательно, меньшее время реакции на управляющий сигнал системы управления.
Использование большого количества взлетных винтов (8) позволяет использовать возможность осуществить экстренную посадку при отказе нескольких из них (до 2-х винтов).
На фиг. 8 проиллюстрированы силы, возникающие во время вертикального взлета и посадки ЛА, где G - сила тяжести, устремленная вниз, а F2 - подъемные силы, создаваемые ВМГ, противодействующие силе тяжести G. Взлетные винты (8) расположены со смещением относительно отсека (2), так что их воздушные струи не сталкиваются с поверхностью отсека. Таким образом, все создаваемые моменты и силы, возникающие при работе ВМГ, воспринимаются элементами фюзеляжа (3). Изменения подъемной силы достигают изменением скорости вращения взлетных винтов (8).
В заявленном изобретении ВМГ расположена симметрично относительно центра масс ЛА. Балансировка летательного аппарата достигается полным уравновешиванием масс всех бортовых систем. Экипаж (в соответствующем варианте конструкции фюзеляжа) располагается в отсеке (2) в районе центра тяжести.
Количество взлетных винтов (8) ВМГ вращающихся в одну сторону равняется количеству винтов, вращающихся в противоположном направлении. Следовательно, реактивные моменты, возникающие в результате вращений этих винтов, взаимно компенсируются.
Ступица (25) каждого взлетного винта (8) присоединена непосредственно к валу взлетного электродвигателя (26), соответственно, угловая скорость вала и соответствующих взлетных электродвигателей (26) одинакова.
ЛА содержит не менее одной расположенной в фюзеляже (3) электрической аккумуляторной батареи (не показана).
В качестве маршевого двигателя (10) ЛА могут быть использованы любые имеющиеся или перспективные двигатели, например: ДВС, электродвигатели, реактивные, турбореактивные, турбовальные и т.д.
На силовом каркасе в задней части фюзеляжа (3) крепится вертикальное оперение (22), (23), которое выступает вверх вблизи обтекателя задней кромки (17). Вертикальное оперение (22), (23) с рулями направления обеспечивают управление по курсу и курсовую устойчивость ЛА.
Также фюзеляж (3) содержит в предпочтительном варианте конструкции шесть стоек шасси (24), выступающих вниз.
Электродистанционная система управления ЛА содержит исполнительные механизмы (ИМ) (не показаны) для управления элевонами (20) и рулями направления.
Для работы бортовой системы управления ЛА имеет набор датчиков.
ЛА СВВП содержит систему ручного и автоматического управления (не показана). Данные системы хорошо известны и будут описаны ниже.
Управление ЛА осуществляется через интерфейс бортового компьютера (не показан), связанного с взлетными электродвигателями (26) взлетных винтов (8), маршевым двигателем (10), ИМ элевонов (20), рулями направления и другими подсистемами ЛА.
Бортовой компьютер ЛА регулирует тяговые усилия каждого из взлетных винтов (8) посредством изменения угловых скоростей вращения. Бортовой компьютер управляет отдельными тяговыми усилиями таким образом, что ЛА может наклоняться вперед, назад (по тангажу) или вбок (по крену). Для увеличения или уменьшения высоты полета необходимо совместное увеличение или уменьшение тяги всех взлетных винтов (8) посредством целенаправленных изменений угловых скоростей. Суммарный реактивный момент взлетных винтов (8) относительно вертикальной оси ЛА может действовать в направлении по часовой стрелке, или же в направлении против часовой стрелки. Управление ЛА относительно вертикальной оси (по курсу) осуществляется изменением величины и направления суммарного реактивного момента ВМГ.
Перевод ЛА из режима вертикального взлета в горизонтальный полет при достижении заданной высоты осуществляется появлением силы тяги маршевого двигателя (10). Постепенное снижение тяги взлетных винтов (8) начинается после набора достаточной скорости для создания консолями крыльев (4)-(7) необходимой подъемной силы. После достижения достаточной несущей способности консолей крыльев (4)-(7) взлетные винты (8) останавливаются и их каналы (9) перекрываются воздухонепроницаемыми заслонками (18). В режим вертикальной посадки ЛА входит после открытия воздухонепроницаемых заслонок (18) и начала вращения взлетных винтов (8) с наращиванием создаваемой ими тяги до уровня достаточного для уравновешивания веса ЛА и дальнейшим снижением скорости горизонтального полета.
Таким образом, бортовой компьютер обеспечивает вертикальный взлет или посадку, висение, а также переходные режимы, когда ЛА необходимо перейти из режима вертикального взлета в режим горизонтального полета и обратно для осуществления вертикальной посадки.
Типовой профиль полета ЛА предполагает вертикальные взлетает и посадку. В случае вынужденной или аварийной посадки аппарат может приземлиться по самолетному со скольжением на полозковых шасси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2767390C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2771536C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2002 |
|
RU2233770C1 |
| БПЛА и способ управления БПЛА | 2024 |
|
RU2831546C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2619976C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2024 |
|
RU2840912C1 |
| Самолет вертикального взлета и посадки | 2020 |
|
RU2738746C1 |
| Самолет вертикального взлета и посадки | 2017 |
|
RU2672539C1 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального или укороченного взлета и посадки. Летательный аппарат содержит фюзеляж, крылья, расположенные по схеме «тандем», вертикальное оперение, шасси, систему управления, силовую установку, винтомоторною группу (ВМГ). ВМГ состоит из, по крайней мере, 8-ми подъемных винтов, управляемых по скорости вращения, каждый из которых приводится во вращение отдельным электродвигателем, и по меньшей мере одного маршевого винта для создания горизонтальной движущей силы, приводящегося во вращение маршевым двигателем. Фюзеляж имеет уплощенный силовой каркас, состоящий из балок и лонжеронов. Подъемные винты имеют одинаковый диаметр в диапазоне 1,5-2,8 м. Обеспечивается увеличение полезной нагрузки, составляющей не менее 20% от массы ЛА, при одновременном увеличении дальности и продолжительности горизонтального полета, не менее 5-ти часов. 11 з.п. ф-лы, 8 ил.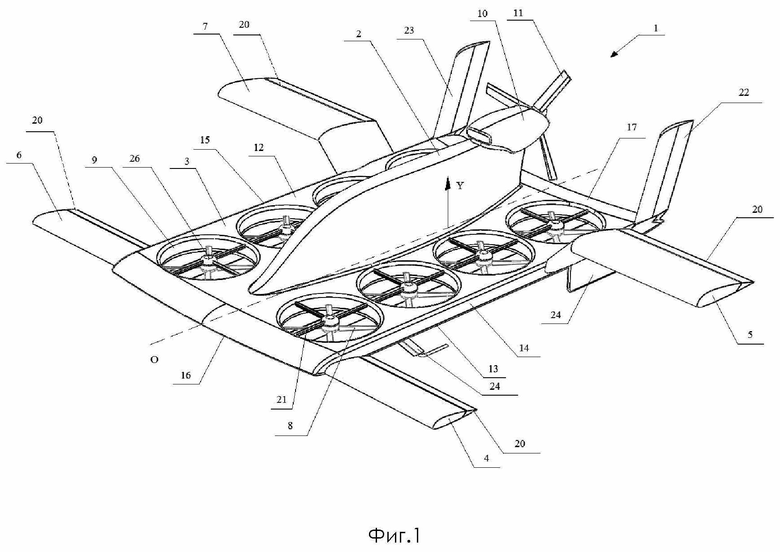
1. Летательный аппарат, содержащий фюзеляж, крылья, вертикальное оперение, шасси, систему управления, силовую установку, винтомоторною группу, состоящую по крайней мере из 8-ми взлетных винтов, управляемых по скорости вращения, каждый из которых приводится во вращение отдельным взлетным электродвигателем, и по меньшей мере из одного маршевого винта для создания горизонтальной движущей силы, приводящегося во вращение маршевым двигателем, отличающийся тем, что летательный аппарат имеет схему тандемного расположения крыльев, а фюзеляж имеет уплощенный силовой каркас, при этом взлетные винты имеют одинаковый диаметр в диапазоне 1,5-2,8 м.
2. Летательный аппарат по п. 1, отличающийся тем, что силовой каркас фюзеляжа имеет конструкцию с поперечными лонжеронами и продольными балками, усиленными профилями.
3. Летательный аппарат по п. 1, отличающийся тем, что в качестве материалов элементов конструкции используются металлические сплавы и композиционные материалы.
4. Летательный аппарат по п. 1, отличающийся тем, что фюзеляж содержит сквозные каналы, в пределы которых полностью встроена винтомоторная группа для создания вертикальной подъемной силы.
5. Летательный аппарат по п. 1 или 4, отличающийся тем, что винтомоторная группа для создания вертикальной подъемной силы расположена в два параллельных продольных ряда.
6. Летательный аппарат по п. 4, отличающийся тем, что сквозные каналы винтомоторной группы выполнены с возможностью перекрытия воздухонепроницаемыми заслонками.
7. Летательный аппарат по п. 6, отличающийся тем, что заслонки выполнены в виде шарнирно смонтированных двухэлементных створок.
8. Летательный аппарат по п. 1, отличающийся тем, что консоли крыльев закреплены на силовом каркасе фюзеляжа со стороны боковых обтекателей.
9. Летательный аппарат по п. 1, отличающийся тем, что вертикальное оперение закреплено на силовом каркасе в задней части фюзеляжа и выступает вверх.
10. Летательный аппарат по п. 1, отличающийся тем, что маршевый двигатель установлен на мотораме, смонтированной на силовом каркасе в задней части фюзеляжа.
11. Летательный аппарат по п. 1, отличающийся тем, что фюзеляж содержит пассажирский и/или грузовой отсек.
12. Летательный аппарат по п. 11, отличающийся тем, что фюзеляж дополнительно содержит кабину экипажа.
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| ИНСТРУМЕНТ ДЛЯ УЛЬТРАЗВУКОВОГО ВЫРЕЗАНИЯ НЕСКОЛЬКИХ ЗАГОТОВОК ИЗ ТВЕРДЫХ И ХРУПКИХМАТЕРИАЛОВ | 0 |
|
SU180474A1 |
| US 20130214086 A1, 22.08.2013 | |||
| US 20200277045 A1, 03.09.2020 | |||
| US 20200115045 A1, 16.04.2020 | |||
| US 8636241 B2, 28.01.2014. | |||

