Область техники, к которой относится изобретение
[1] Настоящая технология относится к лидарным (LiDAR, Light Detection And Ranging) системам и, в частности, к лидарным системам, определяющим расстояние от лидарной системы до объекта.
Уровень техники
[2] В известных решениях предложены и реализованы компьютерные навигационные системы, способствующие навигации и/или управлению транспортными средствами. Известны различные системы такого рода: от простых решений, основанных на определении местоположения на карте и использующих компьютерную систему для помощи водителю в навигации на маршруте от пункта отправления до пункта назначения, до более сложных решений, таких как компьютеризированные и/или автономные системы вождения.
[3] Некоторые из этих систем реализованы в виде широко известной системы круиз-контроля. В этом случае компьютерная система, установленная на транспортном средстве, поддерживает заданную пользователем скорость движения транспортного средства. Некоторые системы круиз-контроля реализуют систему интеллектуального управления дистанцией, позволяя пользователю задавать расстояние до идущего впереди автомобиля (например, выбирать значение, выраженное в количестве транспортных средств). В дальнейшем компьютерная система регулирует скорость транспортного средства, по меньшей мере частично, в зависимости от его приближения к впереди идущему транспортному средству на заранее заданное расстояние. Некоторые из систем круиз-контроля дополнительно оснащены системой предупреждения столкновений, которая при обнаружении транспортного средства (или другого препятствия) перед движущимся транспортным средством замедляет или останавливает его.
[4] Некоторые из наиболее передовых систем обеспечивают полностью автономное движение транспортного средства без непосредственного участия оператора (т.е. водителя) в управлении. Такие автономные транспортные средства содержат системы, способные ускорять, замедлять, останавливать, перестраивать в другой ряд и самостоятельно парковать транспортное средство.
[5] Одна из основных технических сложностей, возникающих при реализации вышеупомянутых систем, относится к способности обнаруживать объект вблизи транспортного средства. В одном примере системам может быть необходимо обнаруживать движущееся впереди транспортное средство (перед транспортным средством, на котором установлена такая система), которое может представлять опасность для данного транспортного средства и требовать принятия системой упреждающих мер, таких как торможение или иное изменение скорости, остановка или перестроение в другой ряд.
[6] Другими техническими проблемами, связанными с реализацией вышеупомянутых систем, являются раскалибровка датчиков и иных элементов, собирающих данные об обстановке вокруг транспортного средства. На датчики и иные элементы оказывают влияние многочисленные факторы, в том числе погода, состояние дорожного полотна, манера вождения, в результате чего со временем может потребоваться их калибровка для обеспечения безошибочной фиксации данных и их правильного использования при управлении транспортными средствами.
[7] В системах на основе лидаров объекты вблизи транспортного средства могут быть обнаружены путем испускания лучей света в направлении интересующей области и измерения отраженных лучей света с использованием детектора. В качестве источника света часто используются лазеры, излучающие световые импульсы в узком диапазоне длин волн. Положение и расстояние до объекта можно вычислить путем расчета времени прохождения излученного и обнаруженного светового луча. Вычисление таких положений в виде «точек данных» позволяет формировать цифровое многомерное представление окружающей обстановки.
[8] В некоторых традиционных системах на основе лидаров для расчета расстояния до объекта отраженные световые лучи преобразуются в соответствующие электрические импульсы. Затем электрические импульсы преобразуются в дискретные цифровые сигналы. Обычно такое преобразование осуществляется с использованием аналого-цифровых преобразователей (АЦП) с заранее заданным разрешением. Например, если АЦП работает с синхроимпульсами с периодом 1 наносекунда (нс) (иными словами, частота синхронизации составляет 1 гигагерц (ГГц)), то такой АЦП при измерении расстояния имеет разрешение ±15 сантиметров (см). Даже в случае работы АЦП со столь высокой скоростью обеспечиваемая им точность может быть недостаточной, когда традиционные системы на основе лидаров встраиваются в транспортные средства, такие как самоуправляемые автомобили (SDC, Self-Driving Car).
[9] Эти проблемы могут обостряться некоторыми предложенными усовершенствованиями существующих систем на основе лидаров. Такие усовершенствования включают в себя использование АЦП, работающего с еще более высокой частотой выборки для дискретизации электрических импульсов, соответствующих отраженным световым лучам. Такие усовершенствования потенциально создают чрезмерную нагрузку для аппаратных и программных обрабатывающих ресурсов, связанных с системами на основе лидаров.
[10] В целом, существует несколько способов и систем для определения расстояния от лидарной системы до объекта. Например, в патентной заявке US 2018113160 A1 (XIA LLC, опубликована 26 апреля 2018 г.) описан способ цифровой обработки для измерения характеристик оцифрованного импульса электронного сигнала, включая время его поступления и/или максимума. В частности, способ подходит для реализации в программируемой вентильной матрице или в цифровом сигнальном процессоре. Для каждого обнаруженного импульса одно или несколько отношений формируются из значений импульса, превышающих базовый уровень и полученных из участков импульса, где значения изменяются при изменении смещения его времени поступления. При этом такие одно или несколько отношений используются в качестве переменных в справочной таблице или уравнении для формирования значения требуемой характеристики. Таблица или уравнение создается заранее с использованием вспомогательного способа анализа импульсов измеряемого вида для установления взаимосвязи между одним или несколькими значениями отношения и требуемой характеристикой и для кодификации этой взаимосвязи в справочной таблице или уравнении. Продемонстрированы временные разрешения на уровне 2-3% от интервала дискретизации.
[11] В патентной заявке US 20190129031 A1 (SHENZHEN SUTENG JUCHUANG TECHNOLOGIES LTD. CO., опубликована 2 мая 2019 г.) описаны импульсная лазерная дальномерная система и способ, основанные на совпадении формы сигнала во временной области. Система содержит программную часть и аппаратную часть. Аппаратная часть содержит оптическую коллиматорную систему, программируемую вентильную матрицу (FPGA), фильтр, фотоэлектрическую преобразовательную систему, систему дискретизации на основе АЦП и схему передачи коротких лазерных импульсов. При отправке управляющего сигнала для управления лазерной передачей матрица FPGA отправляет импульс временной привязки в систему объединения сигналов. Система объединения сигналов объединяет импульс временной привязки с аналоговым отраженным сигналом фиксированной амплитуды с целью формирования отраженного сигнала с временной привязкой. Отраженный сигнал с временной привязкой дискретизируется в цифровой сигнал обнаружения в системе дискретизации на основе АЦП. Цифровой сигнал обнаружения отправляется в матрицу FPGA для анализа данных. Программная часть используется для анализа совпадения формы сигнала во временной области с целью получения результата определения дальности. Результат определения дальности выдается матрицей FPGA.
[12] В патенте KR 101978608 B1 (UNIV SEJONG IND ACAD COOP FOUD., опубликован 14 мая 21019 г.) описана цифровая лидарная система высокого разрешения. Согласно этому изобретению, цифровая лидарная система высокого разрешения содержит: микроконтроллер, который циклически выдает инициирующий сигнал; передающий блок, который формирует и передает лидарные сигналы и разрешающие сигналы лидара при вводе инициирующего сигнала; и приемный блок, который принимает лидарные сигналы, отраженные от цели, управляет модулем обработки сигналов при получении разрешающих сигналов для подсчета количества (N) циклов сигнала и количества (M) нарастающих фронтов синхросигнала, последовательно принимает синхросигналы соответствующего цикла сигнала в соответствии с количеством циклов сигнала в системе фазовой автоподстройки частоты (ФАПЧ), сопоставляет с лидарными сигналами моменты времени, соответствующие нарастающим фронтам синхросигналов, для выполнения дискретизации, сохраняет N×M полученных в результате дискретизации отсчетов лидарного сигнала, определяет сходство между сохраненными отсчетами лидарного сигнала и переданными лидарными сигналами для расчета значений корреляции, определяет моменты времени из рассчитанных значений и отправляет определенные моменты времени микроконтроллеру. Как указано выше, согласно этому изобретению высокочастотные синхросигналы формируются с использованием системы ФАПЧ и метода выборки в эквивалентное время (ETS, Equivalent Time Sampling), а дискретизация выполняется с использованием сформированных синхросигналов так, чтобы обеспечить возможность цифровой обработки лидарных данных с высоким разрешением.
Раскрытие изобретения
[13] Таким образом, существует потребность в системах, позволяющих избегать, уменьшать или преодолевать ограничения известных технологий.
[14] Разработчики настоящей технологии определили недостатки известных решений.
[15] Разработчики определили, что при реализации лидарных систем, способных к сканированию с высоким разрешением, также следует учитывать требования к соответствующему оборудованию. Например, если лидарная система должна обеспечивать пространственное разрешение 1 см, то соответствующая рабочая частота синхронизации должна составлять приблизительно 15 ГГц. Поэтому различные элементы аппаратных средств, такие как процессор, АЦП и т.п. должны работать при такой высокой частоте синхронизации, что повышает стоимость аппаратных средств такой лидарной системы и расходы на ее эксплуатацию.
[16] В целом, разработчики настоящей технологии разработали лидарную систему, способную в некоторых вариантах осуществления изобретения обеспечить повышенное пространственное разрешение по сравнению с традиционными лидарными системами без применения очень высокой частоты синхронизации, т.е. с использованием обычных элементов аппаратных средств. Также предполагается, что разработчики настоящей технологии разработали лидарную систему, способную в других вариантах осуществления изобретения обеспечить повышенное временное разрешение по сравнению с традиционными лидарными системами без применения очень высокой частоты синхронизации, т.е. с использованием обычных элементов аппаратных средств. В некоторых вариантах осуществления изобретения лидарная система согласно настоящей технологии наполняет библиотеку шаблонными профилями импульсов и соответствующими записями. Затем лидарная система обращается к библиотеке для получения параметра разрешения, чтобы рассчитать расстояние между лидарной системой согласно настоящей технологии и объектом.
[17] В некоторых вариантах осуществления изобретения преимущества настоящей технологии включают в себя расширенные возможности системы с точки зрения пространственного и временного разрешения. Кроме того, расширенные возможности системы достигаются без повышения стоимости и сложности системы.
[18] Согласно первому аспекту настоящей технологии реализован компьютерный способ определения расстояния от лидарной системы до объекта на этапе использования, вид которого соответствует виду из множества видов объектов, при этом лидарная система связана с выполняющим способ электронным устройством, а способ включает в себя: получение электронным устройством последовательности дискретных числовых значений, представляющей обратный оптический импульс, соответствующий выходному оптическому импульсу, (а) излученному лидарной системой и (б) вернувшемуся в лидарную систему после взаимодействия с объектом на этапе использования; обращение электронного устройства для получения параметра разрешения к заранее наполненной библиотеке, хранящейся в памяти и содержащей список шаблонных профилей импульсов, при этом профиль из списка шаблонных профилей импульсов связан в библиотеке с соответствующим тестовым объектом, с соответствующим параметром разрешения и с видом соответствующего тестового объекта из множества видов, а обращение включает в себя: определение электронным устройством параметров сходства (а) последовательности дискретных значений и (б) соответствующих профилей из списка шаблонных профилей импульсов, где параметр сходства определяется для (а) последовательности дискретных значений и (б) соответствующего шаблонного профиля импульса из списка шаблонных профилей импульсов, и получение электронным устройством из библиотеки по меньшей мере соответствующего параметра разрешения шаблонного профиля импульса, имеющего наибольший параметр сходства; и использование электронным устройством соответствующего параметра разрешения для определения расстояния от лидарной системы до объекта на этапе использования.
[19] В некоторых вариантах осуществления способа определение параметра сходства включает в себя сравнение электронным устройством последовательности дискретных значений с полным шаблонным профилем импульса.
[20] В некоторых вариантах осуществления способа определение параметра сходства включает в себя использование электронным устройством корреляционного метода для определения параметра сходства.
[21] В некоторых вариантах осуществления способа определение параметра сходства включает в себя использование электронным устройством метода минимальной среднеквадратичной ошибки для определения параметра сходства.
[22] В некоторых вариантах осуществления способа электронное устройство связано с самоуправляемым автомобилем.
[23] В некоторых вариантах осуществления способа он дополнительно включает в себя управление электронным устройством работой самоуправляемого автомобиля на основе расстояния до объекта на этапе использования.
[24] В некоторых вариантах осуществления способа получение по меньшей мере параметра разрешения дополнительно включает в себя получение электронным устройством вида соответствующего тестового объекта для шаблонного профиля импульса, имеющего наибольший параметр сходства, при этом управление работой самоуправляемого автомобиля с использованием электронного устройства дополнительно основано на виде соответствующего тестового объекта.
[25] В некоторых вариантах осуществления способа вид объекта на этапе использования заранее не известен.
[26] В некоторых вариантах осуществления способа последовательность дискретных числовых значений формируется АЦП с заранее определенным временным разрешением.
[27] В некоторых вариантах осуществления способа заранее заданное временное разрешение составляет приблизительно 1 нс.
[28] В некоторых вариантах осуществления способа он до получения последовательности дискретных числовых значений дополнительно включает в себя пополнение электронным устройством заранее наполненной библиотеки.
[29] В некоторых вариантах осуществления способа пополнение для тестового объекта некоторого вида включает в себя: получение электронным устройством соответствующего шаблонного профиля импульса для обратного тестового оптического импульса, соответствующего тестовому выходному оптическому импульсу, (а) излученному лидарной системой и (б) вернувшемуся в лидарную систему после взаимодействия с тестовым объектом, расположенным на заранее заданном расстоянии от лидарной системы; определение электронным устройством параметра разрешения для обратного тестового оптического импульса на основе заранее заданного расстояния; и пополнение электронным устройством библиотеки записью для соответствующего шаблонного профиля импульса, указывающей (а) на соответствующий шаблонный профиль импульса, (б) на вид тестового объекта и (в) на параметр разрешения.
[30] В некоторых вариантах осуществления способа параметр разрешения представляет собой значение времени или значение расстояния.
[31] В некоторых вариантах осуществления способа параметр разрешения представляет собой значение времени, представляющее собой разность между (а) моментом времени, соответствующим фактическому пиковому значению соответствующего шаблонного профиля импульса, и (б) моментом времени, соответствующим рассчитанному пиковому значению соответствующего шаблонного профиля импульса.
[32] В некоторых вариантах осуществления способа использование соответствующего параметра разрешения включает в себя использование электронным устройством значения времени для определения времени прохождения обратного оптического импульса.
[33] В некоторых вариантах осуществления способа он дополнительно включает в себя обучение алгоритма машинного обучения (MLA, Machine Learning Algorithm) прогнозированию наибольшего параметра сходства на основе списка шаблонных профилей импульсов и связанных записей, хранящихся в библиотеке.
[34] В некоторых вариантах осуществления способа он дополнительно включает в себя обучение алгоритма MLA прогнозированию вида тестового объекта на основе списка шаблонных профилей импульсов и связанных записей, хранящихся в библиотеке.
[35] Согласно второму аспекту настоящей технологии реализовано электронное устройство для определения расстояния от лидарной системы до объекта на этапе использования, вид которого соответствует виду из множества видов объектов, при этом лидарная система связана с электронным устройством, способным: получать последовательность дискретных числовых значений, представляющую обратный оптический импульс, соответствующий выходному оптическому импульсу, (а) излученному лидарной системой и (б) вернувшемуся в лидарную систему после взаимодействия с объектом на этапе использования; обращаться для получения параметра разрешения к заранее наполненной библиотеке, хранящейся в памяти и содержащей список шаблонных профилей импульсов, при этом профиль из списка шаблонных профилей импульсов связан в библиотеке с соответствующим тестовым объектом, с соответствующим параметром разрешения и с видом соответствующего тестового объекта из множества видов, а обращение включает в себя: определение параметров сходства (а) последовательности дискретных значений и (б) соответствующих профилей из списка шаблонных профилей импульсов, где параметр сходства определяется для (а) последовательности дискретных значений и (б) соответствующего шаблонного профиля импульса из списка шаблонных профилей импульсов, и получать из библиотеки по меньшей мере соответствующий параметр разрешения шаблонного профиля импульса, имеющего наибольший параметр сходства; и использовать соответствующий параметр разрешения для определения расстояния от лидарной системы до объекта на этапе использования.
[36] В контексте данного описания дискретные числовые значения в целом означают последовательности числовых значений, сформированных преобразователем АЦП. В общем случае АЦП может осуществлять выборку, дискретизацию и кодирование полученного сигнала или импульса. Закодированный полученный сигнал или импульс может называться дискретными числовыми значениями. В числе прочего, дискретные числовые значения могут быть следующих видов: биполярные, полярные, униполярные, без возврата к нулю (NRZ, Non-Return to Zero), с возвратом к нулю (RZ, Return to Zero), двухфазные и т.д.
[37] В контексте данного описания выходной оптический импульс также может называться переданным оптическим импульсом, таким как световой импульс, сформированный источником излучения и отправленный в сторону интересующей области (ROI, Region Of Interest). Выходной луч может иметь один или несколько параметров, таких как длительность импульса, угловая дисперсия импульса, длина волны, мгновенная мощность, плотность фотонов на различных расстояниях от источника света, средняя мощность, интенсивность импульса, ширина импульса, частота повторения импульсов, последовательность импульсов, скважность импульсов, фаза и т.д. Выходной оптический импульс может быть неполяризованным или поляризованным случайным образом, может не иметь определенной или фиксированной поляризации (например, поляризация может изменяться с течением времени) или может иметь определенную поляризацию (например, линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[38] В контексте данного описания обратный оптический импульс также может называться отраженным оптическим импульсом, таким как световой импульс, отраженный от одного или нескольких объектов в области ROI. Под отражением подразумевается, что по меньшей мере часть светового импульса из оптического выходного импульса отражается от одного или нескольких объектов в области ROI. Исходящий луч может иметь один или несколько параметров, таких как время прохождения (т.е. время от излучения до обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность по всему обратному импульсу, распределение фотонов или форма сигнала в течение периода обратного импульса и т.д.
[39] В контексте данного описания источник излучения в целом означает любое устройство, способное испускать излучение, например, сигнал в виде луча. Источник излучения содержит, среди прочего, источник света, способный испускать световые лучи. Источник света может представлять собой лазер, такой как твердотельный лазер, лазерный диод, лазер большой мощности, или альтернативный источник света, такой как источник света на основе светодиода. В некоторых (не имеющих ограничительного характера) примерах источник света представляет собой лазерный диод Фабри-Перо (Fabry-Perot), лазер на квантовой яме, лазер с распределенным брэгговским отражателем (DBR, Distributed Bragg Reflector), лазер с распределенной обратной связью (DFB, Distributed FeedBack) или лазер поверхностного излучения с вертикальным резонатором (VCSEL Vertical-Cavity Surface-Emitting Laser). Кроме того, источник света может излучать световые лучи различных видов, например, световые импульсы, непрерывные волны (CW, Continuous Wave), квазинепрерывные волны и т.д. В некоторых не имеющих ограничительного характера примерах источник света может содержать лазерный диод, способный излучать свет с длиной волны в диапазоне приблизительно 650-1150 нм. В качестве альтернативы источник света может содержать лазерный диод, способный испускать световые лучи с длиной волны в диапазонах приблизительно 800-1000 нм, приблизительно 850-950 нм, приблизительно 1300-1600 нм или в любом другом подходящем диапазоне. Если не указано иное, термин «приблизительно» в отношении числового значения определяется как отклонение до 10% от указанного значения.
[40] В контексте данного описания термин «сервер» означает компьютерную программу, выполняемую соответствующими аппаратными средствами и способную принимать запросы (например, от электронных устройств) через сеть и выполнять эти запросы или инициировать их выполнение. Аппаратные средства могут быть реализованы в виде одного физического компьютера или одной компьютерной системы, что не существенно для настоящей технологии. В настоящем контексте выражение «сервер» не означает, что каждая задача (например, принятая команда или запрос) или некоторая определенная задача принимается, выполняется или запускается одним и тем же сервером (т.е. одними и теми же программными и/или аппаратными средствами). Это выражение означает, что любое количество программных средств или аппаратных средств может принимать, отправлять, выполнять или запускать выполнение любой задачи или запроса либо результатов любых задач или запросов. Все эти программные и аппаратные средства могут представлять собой один сервер или несколько серверов, причем оба эти случая подразумеваются в выражении «по меньшей мере один сервер».
[41] В контексте данного описания термин «электронное устройство» означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения поставленной задачи. В контексте данного описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств, тем не менее, это не является обязательным для настоящей технологии. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя блок автономного управления, персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Должно быть понятно, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства не означает, что оно не может функционировать в качестве сервера для других электронных устройств.
[42] В контексте данного описания выражение «информация» включает в себя информацию любого рода или вида, допускающую хранение в базе данных. Таким образом, информация включает в себя визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные о местоположении, метеорологические данные, данные о дорожном движении, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д., но не ограничивается ими.
[43] В контексте данного описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерных аппаратных средств для хранения этих данных, их применения или обеспечения их использования иным способом. База данных может располагаться в тех же аппаратных средствах, где реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо база данных может располагаться в отдельных аппаратных средствах, таких как специализированный сервер или множество серверов.
[44] В контексте данного описания числительные «первый» «второй», «третий» и т.д. используются лишь для указания различия между существительными, к которым они относятся, но не для описания каких-либо определенных взаимосвязей между этими существительными. Кроме того, как встречается в настоящем описании в другом контексте, ссылка на «первый» элемент и «второй» элемент не исключает того, что эти два элемента в действительности могут быть одним и тем же элементом.
[45] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одной из вышеупомянутых целей и/или аспектов, но не обязательно ко всем ним. Должно быть понятно, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, явным образом здесь не упомянутым.
[46] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, в приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[47] Эти и другие признаки, аспекты и преимущества настоящей технологии поясняются в дальнейшем описании, приложенной формуле изобретения и на следующих чертежах.
[48] На фиг. 1 представлена схема примера компьютерной системы для реализации некоторых вариантов осуществления систем и/или способов согласно настоящей технологии.
[49] На фиг. 2 представлена сетевая компьютерная среда, пригодная для использования с некоторыми вариантами осуществления настоящей технологии.
[50] На фиг. 3 представлена схема примера лидарной системы для реализации некоторых вариантов осуществления систем и/или способов согласно настоящей технологии.
[51] На фиг. 4 представлена соответствующая не имеющему ограничительного характера варианту осуществления настоящей технологии реализация элемента контроллера.
[52] На фиг. 5 представлены отправленный и отраженный оптические импульсы, связанные, соответственно, с выходным и входным лучами, согласно не имеющему ограничительного характера варианту осуществления настоящей технологии.
[53] На фиг. 6 представлен электрический импульс, соответствующий отраженному оптическому импульсу, связанному с входным лучом, согласно не имеющему ограничительного характера варианту осуществления настоящей технологии.
[54] На фиг. 7 представлена последовательность числовых значений, представляющих электрический импульс, соответствующий времени, связанному с отраженным оптическим импульсом, согласно не имеющему ограничительного характера варианту осуществления настоящей технологии.
[55] На фиг. 8 представлена последовательность числовых значений, представляющих электрический импульс, соответствующий расстоянию, связанному с отраженным оптическим импульсом, согласно не имеющему ограничительного характера варианту осуществления настоящей технологии.
[56] На фиг. 9 проиллюстрирована работа лидарной системы в контролируемых рабочих условиях для наполнения библиотеки согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии.
[57] На фиг. 10 представлено множество шаблонных профилей импульсов, сформированных процессором, согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии.
[58] На фиг. 11 представлена библиотека, наполненная процессором, согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии.
[59] На фиг. 12 представлена последовательность дискретных числовых значений, включая дискретные числовые значения, соответствующие расстоянию, связанному с отраженным оптическим импульсом, в условиях использования, согласно не имеющему ограничительного характера варианту осуществления настоящей технологии.
[60] На фиг. 13 представлена блок-схема способа определения расстояния от лидарной системы до объекта согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии.
Осуществление изобретения
[61] Представленные здесь примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Очевидно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[62] Кроме того, чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалистам в данной области должно быть понятно, что другие варианты осуществления настоящей технологии могут быть значительно сложнее.
[63] В некоторых случаях приводятся полезные примеры модификаций настоящей технологии. Они способствуют пониманию, но также не определяют объем или границы настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Более того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[64] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть понятно, что любые описанные здесь структурные схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих основы настоящей технологии. Также должно быть понятно, что любые блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на машиночитаемом физическом носителе информации и могут выполняться компьютером или процессором, независимо от того, показан такой компьютер или процессор явно или нет.
[65] Функции различных элементов, показанных на иллюстрациях, включая любой функциональный блок, обозначенный как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных выполнять соответствующее программное обеспечение. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные выполнять программное обеспечение, и может подразумевать, помимо прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), постоянное запоминающее устройство (ПЗУ) для хранения программного обеспечения, оперативное запоминающее устройство (ОЗУ) и энергонезависимое запоминающее устройство. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[66] Программные модули или просто модули, реализация которых предполагается в виде программных средств, могут быть представлены здесь как любое сочетание элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут выполняться аппаратными средствами, показанными явно или подразумеваемыми.
[67] Далее с учетом вышеизложенных принципов рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящей технологии.
Компьютерная система
[68] На фиг. 1 представлена компьютерная система 100, пригодная для использования с некоторыми вариантами осуществления настоящей технологии и содержащая различные элементы аппаратных средств, включая один или несколько одно- или многоядерных процессоров, обобщенно представленных процессором 110, твердотельный накопитель 120 и память 130, которая может представлять собой ОЗУ или память любого другого вида.
[69] Связь между различными элементами компьютерной системы 100 может осуществляться через одну или несколько внутренних и/или внешних шин (не показаны), таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д., с которыми различные аппаратные элементы соединены электронными средствами. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 120 хранит программные команды, пригодные для загрузки в память 130 и исполнения процессором 110 с целью определения наличия объекта. Например, программные команды могут входить в состав управляющего приложения транспортного средства, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может содержать дополнительные и/или не обязательные элементы (не показаны), такие как модули передачи данных по сети, модули определения местоположения и т.д.
Сетевая компьютерная среда
[70] На фиг. 2 представлена сетевая компьютерная среда 200, пригодная для использования с некоторыми вариантами осуществления систем и/или способов согласно настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или с пользователем (не показан), связанным с транспортным средством 220, таким как оператор транспортного средства 220, и сервер 235, связанный с электронным устройством 210 через сеть 240 связи (например, через сеть Интернет и т.п., как более подробно описано ниже).
[71] Сетевая компьютерная среда 200 также может содержать спутник системы GPS (не показан), передающий электронному устройству 210 или и/или принимающий от него сигнал системы GPS. Должно быть понятно, что настоящая технология не ограничивается системой GPS и может использовать технологию определения местоположения, отличную от системы GPS. Следует отметить, что спутник системы GPS может вовсе отсутствовать.
[72] Транспортное средство 220, с которым связано электронное устройство 210, может представлять собой любое транспортное средство для отдыха или иной деятельности, такое как автомобиль для индивидуального или коммерческого использования, грузовой автомобиль, мотоцикл и т.д. Несмотря на то, что транспортное средство 220 изображено в виде наземного транспортного средства, это не является обязательным для всех вариантов осуществления настоящей технологии. Например, транспортное средство 220 может представлять собой водное судно, такое как лодка, или воздушное судно, такое как беспилотный летательный аппарат.
[73] Транспортное средство 220 может управляться пользователем или представлять собой транспортное средство без водителя. В по меньшей мере некоторых вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может быть реализовано в виде самоуправляемого автомобиля. Следует отметить, что не накладывается каких-либо ограничений на конкретные параметры транспортного средства 200, такие как производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, привод на два или на четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства, рабочий объем двигателя и т.д.
[74] На реализацию электронного устройства 210 также не накладывается каких-либо ограничений. Например, электронное устройство 210 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, автомобильного навигатора (например, TomTom™, Garmin™), планшета, персонального компьютера, встроенного в транспортное средство 220, и т.д. Следует отметить, что электронное устройство 210 может быть связано или не связано с транспортным средством 220 постоянным образом. Дополнительно или в качестве альтернативы, электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления изобретения электронное устройство 210 содержит дисплей 270.
[75] Электронное устройство 210 может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В некоторых вариантах осуществления изобретения электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, твердотельный накопитель 120 и память 130. Иными словами, электронное устройство 210 содержит аппаратные средства и/или прикладное программное обеспечение и/или встроенное программное обеспечение либо их сочетание для обработки данных, как более подробно описано ниже.
[76] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой сеть Интернет. В альтернативных не имеющих ограничительного характера вариантах осуществления изобретения сеть связи может быть реализована в виде любой подходящей локальной сети (LAN, Local Area Network), глобальной сети (WAN, Wide Area Network), частной сети связи и т.п. Очевидно, что варианты осуществления сети связи приведены лишь в иллюстративных целях. Реализация линии связи (отдельно не обозначена) между электронным устройством 210 и сетью 240 связи зависит, среди прочего, от реализации электронного устройства 210. В качестве примера, не имеющего ограничительного характера, в тех вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано в виде устройства беспроводной связи, такого как смартфон или автомобильный навигатор, линия связи может быть реализована в виде беспроводной линии связи. Примеры беспроводных линий связи включают в себя канал сети связи 3G, канал сети связи 4G и т.п. В сети 240 связи также может использоваться беспроводное соединение с сервером 235.
[77] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован в виде компьютерного сервера и может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В одном не имеющем ограничительного характера примере сервер 235 реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™, но он также может быть реализован с использованием любых других подходящих аппаратных средств, прикладного программного обеспечения и/или встроенного программного обеспечения либо их сочетания. В представленных не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 представляет собой один сервер. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии (не показаны) функции сервера 235 могут быть распределены между несколькими серверами.
[78] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 устройства 210 может быть связан с сервером 235 для получения одного или нескольких обновлений. Обновления могут представлять собой обновления программного обеспечения, обновления карт, обновления маршрутов, обновления данных о погоде и т.д. В некоторых вариантах осуществления настоящей технологии процессор 110 также может отправлять серверу 235 некоторые рабочие данные, такие как пройденные маршруты, данные о дорожном движении, рабочие характеристики и т.д. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или обезличены.
[79] Следует отметить, что электронное устройство 210 может использовать множество датчиков и систем для сбора информации об окрестности транспортного средства 220. Как показано на фиг. 2, транспортное средство 220 может быть оснащено множеством систем 280 датчиков. Следует отметить, что различные системы датчиков из множества систем 280 датчиков могут использоваться для сбора данных различных видов об окрестности 250 транспортного средства 220.
[80] В одном примере множество систем 280 датчиков может содержать одну или несколько систем датчиков вида «камера», установленных на транспортном средстве 220 и связанных с процессором 110. В общем случае одна или несколько систем датчиков вида «камера» могут собирать данные изображения о различных частях окрестности 250 транспортного средства 220. В некоторых случаях данные изображения, предоставленные одной или несколькими системами датчиков вида «камера», могут быть использованы электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может вводить данные изображения, обеспечиваемые одной или несколькими системами датчиков вида «камера», в нейронную сеть обнаружения объектов (ODNN, Object Detection Neural Network), обученную определению местоположения и классификации потенциальных объектов в окрестности 250 транспортного средства 220.
[81] В другом примере множество систем 280 датчиков может содержать одну или несколько систем радиолокационных датчиков, установленных на транспортном средстве 220 и связанных с процессором 110. В общем случае одна или несколько систем радиолокационных датчиков могут использовать радиоволны для сбора данных о различных частях окрестности 250 транспортного средства 220. Например, одна или несколько систем радиолокационных датчиков могут собирать радиолокационные данные о потенциальных объектах в окрестности 250 транспортного средства 220, при этом такие данные могут представлять собой расстояние от системы радиолокационных датчиков до объектов, ориентацию объектов, скорость объектов и т.п.
[82] Следует отметить, что множество систем 280 датчиков может содержать системы датчиков других видов в дополнение к описанным выше без выхода за границы настоящей технологии.
[83] Кроме того, транспортное средство 220 оснащено одной или несколькими лидарными системами 230 для сбора информации об окрестности 250 транспортного средства 220. Лидарная система 230 может использоваться в дополнение к множеству систем 280 датчиков или, в некоторых случаях, вместо него. Лидарная система 230 может быть установлена изначально (или при модернизации) на транспортном средстве 220 в различных местах и/или в различных конфигурациях.
[84] Например, лидарная система 230 может быть установлена с внутренней стороны на верхней части ветрового стекла транспортного средства 220. Тем не менее, как показано на фиг. 2, в пределах объема настоящей технологии возможны и другие места установки лидарной системы 230, включая заднее окно, боковые окна, передний капот, крышу, переднюю решетку, передний бампер или боковую поверхность транспортного средства 220. В некоторых случаях лидарная система 230 может быть смонтирована в специальном кожухе, установленном сверху транспортного средства 220.
[85] Как упомянуто выше, одна или несколько лидарных систем 230 также могут быть установлены в различных конфигурациях.
[86] В одном варианте осуществления изобретения лидарная система 230 из числа представленных на фиг. 2 лидарных систем 230, установленная на крыше транспортного средства 220, может иметь поворотную конструкцию. Например, лидарная система 230, установленная на транспортном средстве 220 в поворотной конструкции, может содержать по меньшей мере некоторые элементы, способные поворачиваться на 360 градусов вокруг оси вращения лидарной системы 230. Следует отметить, что лидарная система 230, установленная в поворотных конструкциях, может собирать данные о большинстве частей окрестности 250 транспортного средства 220.
[87] В другом варианте осуществления изобретения лидарная система 230 из числа лидарных систем 230, установленных на боковой поверхности (или, например, на передней решетке) транспортного средства 220, может иметь неповоротную конструкцию. Например, лидарная система 230, установленная на транспортном средстве 220 в неповоротной конструкции, может содержать по меньшей мере некоторые элементы, не способные поворачиваться на 360 градусов, и может собирать данные о заранее заданных частях окрестности 250 транспортного средства 220.
[88] Независимо от конкретного местоположения и/или конкретной конфигурации, лидарная система 230 способна фиксировать данные об окрестности 250 транспортного средства 220 для построения многомерной карты объектов в окрестности 250 транспортного средства 220. Ниже описана фиксация данных об окрестности 250 транспортного средства 220 одной или несколькими лидарными системами 230.
Лидарная система
[89] На фиг. 3 представлен не имеющий ограничительного характера пример лидарной системы 310. Следует отметить, что подобно лидарной системе 310 могут быть реализованы одна или несколько лидарных систем 230 (см. фиг. 2).
[90] В общем случае лидарная система 310 может содержать множество внутренних элементов, таких как (а) элемент 312 источника излучения, например, элемент источника света, (б) сканирующий элемент 316, (в) элемент 318 приемника (здесь также называется системой обнаружения), (г) элемент 320 контроллера и т.д. Предполагается, что в дополнение к представленным выше внутренним элементам, не составляющим исчерпывающего перечня, лидарная система 310 может содержать множество датчиков (таких как датчик температуры, датчик влаги и т.д.), не показанных на фиг. 3 для упрощения.
[91] Предполагается, что в некоторых случаях один или несколько внутренних элементов лидарной системы 310 могут быть реализованы в общем корпусе 340, как показано на фиг. 3. В других вариантах реализации по меньшей мере элемент 320 контроллера может быть размещен вдали от общего корпуса 340.
Элемент источника излучения
[92] Элемент 312 источника излучения связан с элементом 320 контроллера и способен испускать излучение, такое как излучаемый сигнал в виде луча. В некоторых вариантах осуществления изобретения элемент 312 источника излучения способен излучать свет и называется здесь элементом 312 источника света. Элемент 312 источника света содержит один или несколько лазеров, излучающих свет с определенной рабочей длиной волны. Рабочая длина волны элемента 312 источника света может соответствовать инфракрасному, видимому и/или ультрафиолетовому диапазону электромагнитного спектра. Например, элемент 312 источника света может содержать один или несколько лазеров с рабочей длиной волны в диапазоне приблизительно 650-1150 нм. В качестве альтернативы, источник света может содержать лазерный диод, способный излучать свет с длиной волны в диапазонах приблизительно 800-1000 нм, приблизительно 850-950 нм и приблизительно 1300-1600 нм. Тем не менее, следует отметить, что элемент 312 источника света может содержать лазеры с другими рабочими длинами волны без выхода за границы настоящей технологии. В некоторых других вариантах осуществления изобретения элемент 312 источника света содержит светодиод.
[93] Во время работы элемент 312 источника света формирует выходной луч 322 света. Предполагается, что выходной луч 322 может иметь любой подходящий вид, например, непрерывный или импульсный. Как показано на фиг. 3, выходной луч 322 испускается лидарной системой 310 в направлении окрестности 250.
[94] Можно предположить, что объект 330 расположен на расстоянии 390 от лидарной системы 310. Следует отметить, что, как более подробно описано ниже, наличие объекта 330 и расстояние 390 заранее не известны и что лидарная система 310 предназначена для определения местоположения объекта 330 и/или фиксации данных для построения многомерной карты по меньшей мере части окрестности 250 с объектом 330 (и с другими потенциальными объектами), представленным на ней в виде одной или нескольких точек данных.
[95] Когда выходной луч 322 достигает объекта 330, объект 330 может отразить по меньшей мере часть света выходного луча 322 и некоторые из отраженных световых лучей могут вернуться в лидарную систему 310. Под отражением подразумевается, что по меньшей мере часть светового луча из выходного луча 322 отражается от объекта 330. Другая часть светового луча из выходного луча 322 может быть поглощена объектом 330.
[96] В представленном на фиг. 3 примере отраженный световой луч представлен входным лучом 324. Входной луч 324 фиксируется лидарной системой 310 с использованием элемента 318 приемника. Следует отметить, что в некоторых случаях входной луч 324 может содержать лишь относительно небольшую долю света выходного луча 322. Также следует отметить, что угол входного луча 324 относительно поверхности объекта 330 («угол отражения») может совпадать или отличаться от угла выходного луча 322 относительно поверхности объекта 330 («угла падения»).
[97] Также следует отметить, что рабочая длина волны лидарной системы 310 может быть в диапазонах электромагнитного спектра, соответствующих солнечному свету. Поэтому в некоторых случаях солнечный свет может представлять собой фоновый шум, способный заглушать световой сигнал, обнаруживаемый лидарной системой 310. Этот солнечный фоновый шум может приводить к ложноположительным обнаружениям и/или может искажать результаты измерений лидарной системы 310. Несмотря на возможность увеличения отношения сигнал-шум (SNR, Signal-to-Noise Ratio) лидарной системы 310 за счет повышения уровня мощности выходного луча 322, это может быть нежелательным в по меньшей мере некоторых ситуациях. Например, в результате повышения уровня мощности выходного луча 322 лидарная система 310 может представлять опасность для зрения.
[98] Предполагается, что лидарная система 310 может содержать безопасный для зрения лазер, или, иными словами, лидарная система 310 может быть классифицирована как безопасная для зрения лазерная система или лазерное изделие. В общем случае безопасный для зрения лазер, лазерная система или лазерное изделие может представлять собой систему, в которой некоторые или все параметры из числа длины волны излучения, средней мощности, пиковой мощности, пиковой интенсивности, энергии импульса, размера луча, расходимости луча, продолжительности воздействия или схема развертки выходного луча такие, чтобы риск повреждения глаз человека излученным этой системой светом был незначительным или полностью отсутствовал.
[99] Как описано выше, элемент 312 источника света может содержать один или несколько импульсных лазеров, способных формировать и излучать световые импульсы определенной длительности. Например, элемент 312 источника света может излучать импульсы с длительностью импульса (шириной импульса) 10-100 нс. В другом примере элемент 312 источника света может излучать импульсы с частотой повторения импульсов приблизительно от 100 кГц до 5 МГц или с периодом импульсов (временем между следующими друг за другом импульсами) приблизительно от 200 нс до 10 мкс. При этом в общем случае элемент 312 источника света может формировать выходной луч 322 с любой подходящей средней оптической мощностью, а выходной луч 322 может содержать оптические импульсы с любой подходящей для данного варианта применения энергией импульса или пиковой оптической мощностью.
[100] В некоторых вариантах осуществления изобретения элемент 312 источника света может содержать один или несколько лазерных диодов, таких как лазерный диод Фабри-Перо, лазер на квантовой яме, DBR-лазер, DFB-лазер или VCSEL-лазер. Например, лазерный диод, работающий в элементе 312 источника света, может представлять собой лазерный диод на арсениде алюминия-галлия (AlGaAs), лазерный диод на арсениде индия-галлия (InGaAs), лазерный диод на арсениде-фосфиде индия-галлия (InGaAsP) или любой другой подходящий лазерный диод. Также предполагается, что элемент 312 источника света может содержать один или несколько лазерных диодов с модуляцией тока для формирования оптических импульсов.
[101] В некоторых вариантах осуществления изобретения выходной луч 322, излученный элементом 312 источника света, представляет собой коллимированный оптический луч с любой подходящей для данного варианта применения расходимостью луча. В общем случае расходимость выходного луча 322 представляет собой угловую меру увеличения размера луча (например, радиуса луча или диаметра луча) по мере удаления выходного луча 322 от элемента 312 источника света или от лидарной системы 310. В некоторых вариантах осуществления изобретения выходной луч 322 может иметь по существу круглое поперечное сечение.
[102] Также предполагается, что выходной луч 322, излученный элементом 312 источника света, может быть неполяризованным или поляризованным случайным образом, может не иметь определенной или фиксированной поляризации (например, его поляризация может изменяться с течением времени) или может иметь определенную поляризацию (например, выходной луч 322 может иметь линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[103] В по меньшей мере некоторых вариантах осуществления изобретения выходной луч 322 и входной луч 324 могут быть по существу соосными. Иными словами, выходной луч 322 и входной луч 324 могут, по меньшей мере частично, перекрываться или иметь общую ось распространения так, чтобы входной луч 324 и выходной луч 322 распространялись вдоль практически одного и того же оптического пути (но в противоположных направлениях). Тем не менее, в других вариантах осуществления изобретения предполагается, что выходной луч 322 и входной луч 324 могут быть несоосными или, иными словами, могут не перекрываться или не иметь общей оси распространения внутри лидарной системы 310 без выхода за границы настоящей технологии.
[104] Следует отметить, что в по меньшей мере некоторых вариантах осуществления настоящей технологии элемент 312 источника света способен поворачиваться, например, на 360 градусов или меньше, вокруг оси вращения (не показана) лидарной системы 310, когда лидарная система 310 реализована в поворотной конструкции. Тем не менее, в других вариантах осуществления изобретения элемент 312 источника света может быть неподвижным, даже когда лидарная система 310 реализована в поворотной конструкции, без выхода за границы настоящей технологии.
Внутренние траектории луча
[105] Как схематически показано на фиг. 3, лидарная система 310 может использовать некоторую внутреннюю траекторию луча из множества 314 внутренних траекторий луча для испускания выходного луча 322 (сформированного элементом 312 источника света) в направлении окрестности 250. В одном примере внутренняя траектория луча из множества 314 внутренних траекторий луча может обеспечивать поступление света от элемента 312 источника света в сканирующий элемент 316, а сканирующий элемент 316, в свою очередь, может обеспечивать излучение выходного луча 322 в направлении окрестности 250.
[106] Лидарная система 310 также может использовать другую внутреннюю траекторию луча из множества 314 внутренних траекторий луча для подачи входного луча 324 в элемент 318 приемника. В одном примере другая внутренняя траектория луча из множества 314 внутренних траекторий луча может обеспечивать поступление входного луча 324 из сканирующего элемента 316 в элемент 318 приемника. В другом примере другая внутренняя траектория луча из множества 314 внутренних траекторий луча может обеспечивать поступление входного луча 324 непосредственно из окрестности 250 в элемент 316 приемника (без прохождения входного луча 324 через сканирующий элемент 316).
[107] Следует отметить, что множество 314 внутренних траекторий луча может содержать множество оптических элементов. Например, лидарная система 310 может содержать один или несколько оптических элементов, способных обрабатывать, придавать форму, фильтровать, модифицировать или направлять выходной луч 322 и/или входной луч 324. Например, лидарная система 310 может содержать одну или несколько линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических (MEM, MicroelEctroMechanical) элементов, коллиматорных элементов или голографических элементов.
[108] Предполагается, что в по меньшей мере некоторых вариантах осуществления изобретения для одной внутренней траектории луча и другой внутренней траектории луча из множества 314 внутренних траекторий луча могут совместно использоваться по меньшей мере некоторые общие оптические элементы. Тем не менее, это не является обязательным для всех вариантов осуществления настоящей технологии.
Сканирующий элемент
[109] В общем случае сканирующий элемент 316 направляет выходной луч 322 в одном или в нескольких направлениях в сторону окрестности 250. Сканирующий элемент 316 может содержать множество оптических элементов и/или механических элементов для реализации сканирования выходного луча 322. Например, сканирующий элемент 316 может содержать одно или несколько зеркал, призм, линз, элементов MEM, пьезоэлектрических элементов, оптических волокон, делителей, дифракционных элементов, коллиматорных элементов и т.п. Следует отметить, что сканирующий элемент 316 также может содержать один или несколько исполнительных механизмов (не показаны), обеспечивающих, например, вращение, наклон, поворот или угловое перемещение вокруг одной или нескольких осей по меньшей мере некоторых оптических элементов.
[110] Сканирующий элемент 316 может сканировать выходной луч 322 во множестве горизонтальных угловых диапазонов и/или вертикальных угловых диапазонов. Иными словами, сканирующий элемент 316 может обеспечить лидарной системе 310 доступ к области 380 ROI. Область 380 ROI лидарной системы 310 может соответствовать площади, объему, зоне, угловому диапазону и/или части (или нескольким частям) окрестности 250, в которой лидарная система 310 может выполнять сканирование и/или фиксировать данные.
[111] Следует отметить, что сканирующий элемент 316 может сканировать выходной луч 322 по горизонтали и/или по вертикали, поэтому область 380 ROI лидарной системы 310 может иметь горизонтальное направление и вертикальное направление. Например, лидарная система 310 может иметь 360-градусную горизонтальную область ROI и 45-градусную вертикальную область ROI.
[112] Сканирующий элемент 316 может быть связан с элементом 320 контроллера. Элемент 320 контроллера может управлять сканирующим элементом 316, направляя выходной луч 322 в требуемом направлении и/или согласно требуемой схеме сканирования. В общем случае схема сканирования может соответствовать схеме или траектории, согласно которой выходной луч 322 направляется сканирующим элементом 316 во время работы.
[113] Таким образом, лидарная система 310 может использовать схему сканирования для формирования облака точек, которое по существу покрывает область 380 ROI лидарной системы 310. Как более подробно описано ниже, это облако точек лидарной системы 310 может быть использовано для формирования многомерной карты объектов в окрестности 250 транспортного средства 220.
[114] В некоторых вариантах осуществления изобретения элемент 312 источника света во время работы излучает световые импульсы (представленные выходным лучом 322), которыми сканирующий элемент 316 сканирует область 380 ROI лидарной системы 310 согласно схеме сканирования. Как описано выше, объект 330 может отразить один или несколько излученных импульсов. Элемент 318 приемника принимает или обнаруживает фотоны входного луча 324 и формирует один или несколько репрезентативных сигналов данных. Например, элемент 318 приемника может формировать выходной электрический сигнал 422 (описан ниже), представляющий входной луч 324. Элемент 318 приемника также может подавать сформированный таким образом электрический сигнал в элемент 320 контроллера для дальнейшей обработки.
Элемент приемника
[115] Элемент 318 приемника связан с элементом 320 контроллера и может быть реализован различными способами. Например, элемент 318 приемника может содержать фотоприемник, оптический приемник, оптический датчик, детектор, фотодетектор, оптический детектор, оптические волокна и т.п. Как описано выше, в некоторых вариантах осуществления изобретения элемент 318 приемника получает или обнаруживает по меньшей мере часть входного луча 324 и формирует электрический сигнал, соответствующий входному лучу 324. Например, если входной луч 324 содержит оптический импульс, то элемент 318 приемника может сформировать импульс электрического тока или напряжения, соответствующий оптическому импульсу, обнаруженному элементом 318 приемника.
[116] Предполагается, что элемент 318 приемника может быть реализован с использованием одного или нескольких лавинных фотодиодов (APD, Avalanche PhotoDiode), одного или нескольких однофотонных лавинных диодов (SPAD, Single-Photon Avalanche Diode), одного или нескольких PN-фотодиодов (например, со структурой фотодиода, образованной полупроводником p-типа и полупроводником n-типа), одного или нескольких PIN-фотодиодов (например, со структурой фотодиода, содержащей область собственного нелегированного полупроводника, расположенную между областями p-типа и n-типа) и т.п.
[117] В некоторых не имеющих ограничительного характера вариантах осуществления изобретения элемент 318 приемника также может содержать схему, выполняющую усиление сигнала, выборку, фильтрацию, обработку сигнала, аналого-цифровое преобразование, преобразование времени в код, обнаружение импульсов, пороговое обнаружение, обнаружение нарастающего фронта, обнаружение спадающего фронта и т.п. Например, элемент 318 приемника может содержать электронные элементы, способные преобразовывать полученный фототок (например, ток, сформированный фотодиодом APD при приеме оптического сигнала) в сигнал напряжения. Элемент 318 приемника также может содержать дополнительную схему для формирования аналогового или цифрового выходного сигнала, соответствующего одной или нескольким характеристикам (например, нарастающему фронту, спадающему фронту, амплитуде, длительности и т.п.) принятого оптического импульса.
Элемент контроллера
[118] В зависимости от варианта реализации, элемент 320 контроллера может содержать один или несколько процессоров, схему ASIC, матрицу FPGA и/или другую подходящую схему. Элемент 320 контроллера также может содержать машиночитаемую физическую память для хранения команд, выполняемых элементом 320 контроллера, и данных, которые элемент 320 контроллера может формировать на основе сигналов, полученных от других внутренних элементов лидарной системы 310, и/или может передавать в виде сигналов другим внутренним элементам лидарной системы 310. Память может содержать энергозависимые (например, ОЗУ) и/или энергонезависимые (например, флэш-память, жесткий диск) элементы. Элемент 320 контроллера может формировать данные во время работы и сохранять их в памяти. Например, данные, сформированные элементом 320 контроллера, могут указывать на точки данных в облаке точек лидарной системы 310.
[119] Предполагается, что в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии элемент 320 контроллера может быть реализован подобно электронному устройству 210 и/или компьютерной системе 100 без выхода за границы настоящей технологии.
[120] Помимо сбора данных от элемента 318 приемника, элемент 320 контроллера также может передавать управляющие сигналы элементу 312 источника света и сканирующему элементу 316 и потенциально принимать от них диагностические данные.
[121] Как описано выше, элемент 320 контроллера связан с элементом 312 источника света и/или со сканирующим элементом 316 и/или с элементом 318 приемника. Элемент 320 контроллера может получать от элемента 312 источника света электрические инициирующие импульсы, каждый из которых соответствует излучению оптического импульса элементом 312 источника света. Элемент 320 контроллера также может передавать элементу 312 источника света команды, управляющий сигнал и/или инициирующий сигнал, указывающий на то, когда элемент 312 источника света должен формировать оптические импульсы.
[122] Например, элемент 320 контроллера может отправлять электрический инициирующий сигнал, содержащий электрические импульсы, так, чтобы элемент 312 источника света излучал оптический импульс в ответ на каждый электрический импульс электрического инициирующего сигнала. Также предполагается, что элемент 320 контроллера может инициировать корректировку элементом 312 источника света одной или нескольких характеристик света, сформированного элементом 312 источника света, таких как частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность, длина волны оптических импульсов и т.д.
[123] Следует отметить, что элемент 320 контроллера может определять значение времени прохождения для оптического импульса на основе информации о времени, связанной (а) с моментом времени излучения импульса элементом 312 источника света и (б) с моментом времени обнаружения или приема части импульса (например, из входного луча 324) элементом 318 приемника.
[124] Предполагается, что элемент 320 контроллера может анализировать одну или несколько характеристик электрических сигналов от элемента 312 источника света и/или от элемента 318 приемника с целью определения одной или нескольких характеристик объекта 330, таких как расстояние 390 от лидарной системы 310.
[125] Например, элемент 320 контроллера может определять значение времени прохождения и/или значение фазовой модуляции для излученного импульса из выходного луча 322. Можно предположить, что лидарная система 310 определяет значение времени T прохождения, представляющее, в известном смысле, время прохождения излученного импульса в обоих направлениях: от лидарной системы 310 до объекта 330 и обратно до лидарной системы 310. В результате элемент 320 контроллера может определять расстояние 390 согласно следующему уравнению:

где D - расстояние 390, T - значение времени прохождения, c - скорость света. Скорость света в вакууме составляет 299792458 м/с. Фактическое значение скорости света зависит от показателя преломления n среды, в которой распространяется свет. Соотношение между скоростью света в вакууме и скоростью света в среде определяется следующим уравнением:
где ν - скорость света в среде, n - показатель преломления соответствующей среды. Например, если среда представляет собой воздух, то показатель n преломления приблизительно равен 1,0003 и, следовательно, скорость света приблизительно составляет 299702547 м/с. Аналогично, если среда представляет собой стекло, то показатель n преломления приблизительно равен 1,5 и, следовательно, скорость света приблизительно составляет 199861638 м/с. Следует отметить, что для простоты при различных расчетах в настоящем описании скорость света в воздухе считается приблизительно равной 3,0×108 м/с. Тем не менее, при выполнении расчетов может использоваться фактическое значение скорости света без ограничения объема настоящей технологии.
[126] Как описано выше, лидарная система 310 используется для определения расстояния до одного или нескольких других потенциальных объектов, расположенных в окрестности 250. Путем сканирования выходного луча 322 в области 380 ROI лидарной системы 310 согласно схеме сканирования лидарная система 310 способна сопоставлять расстояния (подобные расстоянию 390) с соответствующими точками данных в области 380 ROI лидарной системы 310. В результате лидарная система 310 может отображать эти последовательно зафиксированные точки данных (например, облако точек) в виде многомерной карты.
[127] Например, эта многомерная карта используется электронным устройством 210 для обнаружения или идентификации иным образом объектов либо для определения формы или расстояния до потенциальных объектов в области 380 ROI лидарной системы 310. Предполагается, что лидарная система 310 может циклически или итеративно фиксировать и/или формировать облака точек с любой подходящей для данного варианта применения скоростью.
[128] Следует отметить, что местоположение объекта в окрестности 250 транспортного средства 220 в области ROI лидарной системы 310 может быть перекрыто, охвачено или закрыто, по меньшей мере частично. Например, объект 330 может включать в себя полностью или частично человека, транспортное средство, мотоцикл, грузовой автомобиль, поезд, велосипед, инвалидную коляску, детскую коляску, пешехода, животное, дорожный знак, светофор, разделительную линию, дорожную разметку, парковочное место, пилон, ограждение, дорожный барьер, выбоину, железнодорожный переезд, препятствие на дороге или рядом с ней, бордюр, остановившееся на дороге или рядом с ней транспортное средство, столб, дом, здание, мусорный бак, почтовый ящик, дерево, любой другой подходящий объект или любое другое подходящее сочетание двух или более объектов целиком или их частей.
[129] На фиг. 4 представлена соответствующая не имеющим ограничительного характера вариантам осуществления настоящей технологии реализация элемента 320 контроллера.
[130] В частности, в лидарной системе 310 элемент 320 контроллера содержит преобразователь 402 АЦП, процессор 404 и память 406. Следует отметить, что в по меньшей мере некоторых вариантах осуществления настоящей технологии могут присутствовать другие элементы, не показанные для ясности.
[131] Как описано выше, излученный выходной луч 322 и отраженный световой луч, представленный входным лучом 324, могут содержать оптические импульсы. Фиг. 5 содержит отображение 410 отправленного оптического импульса 412 и отраженного оптического импульса 414, связанных, соответственно, с выходным лучом 322 и со входным лучом 324, согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии. На горизонтальной оси представлена длительность отправленного оптического импульса 412 и отраженного оптического импульса 414 в наносекундах (нс). Например, длительность отправленного оптического импульса 412 и отраженного оптического импульса 414 составляет 3 нс. Тем не менее, в других примерах длительность отраженного оптического импульса 414 может отличаться от длительности отправленного оптического импульса 412. Различие их длительностей может зависеть от различных факторов, таких как скорость перемещения лидарной системы 310 и/или объекта 330, вид объекта 330 и многие другие факторы, способные изменять характеристики отраженного оптического импульса 414. На вертикальной оси представлена амплитуда отправленного оптического импульса 412 и отраженного оптического импульса 414. Предполагается, что в некоторых вариантах осуществления изобретения амплитуда может представлять мощность или энергию, связанную с отправленным оптическим импульсом 412 и с отраженным оптическим импульсом 414, и без ограничения объема настоящей технологии может использоваться любая другая подходящая длительность импульса.
[132] Как показано, отправленный оптический импульс 412 может быть отправлен в направлении объекта 330 лидарной системой 310, расположенной на расстоянии 390 (см. фиг. 3). В одном примере расстояние 390 может составлять 50 см. Отправленный оптический импульс 412 может быть отражен объектом 330 в направлении лидарной системы 310. Амплитуда отраженного оптического импульса 414, отраженного от объекта 330, может зависеть от вида объекта 330. Например, если объект 330 представляет собой транспортное средство с глянцевым металлическим корпусом, то амплитуда отраженного оптического импульса 414 может быль больше, чем в случае объекта 330, представляющего собой пешехода. Поскольку в представленном выше примере объект 330 расположен на расстоянии 50 см, отраженный оптический импульс 414 может быть принят лидарной системой 310 приблизительно через 3,33 нс.
[133] Лидарная система 310 может передавать отраженный оптический импульс 414 в элемент 318 приемника. Элемент 318 приемника может формировать выходной электрический сигнал, представляющий отраженный оптический импульс 414. Фиг. 6 содержит отображение 420 электрического импульса 422, соответствующего отраженному оптическому импульсу 414, связанному с входным лучом 324, согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии. Следует отметить, что электрический импульс 422 может соответствовать импульсу тока или напряжения.
[134] Элемент 318 приемника может отправлять электрический импульс 422 в преобразователь 402 АЦП (см. фиг. 4). В общем случае преобразователь 402 АЦП способен преобразовывать электрический импульс 422 в последовательность дискретных числовых значений. Например, преобразователь 402 АЦП может формировать последовательность 431 дискретных числовых значений, содержащую дискретные числовые значения 432, 434 и 436 (см. отображение 430 на фиг. 7). Фиг. 7 содержит отображение 430 последовательности 431 дискретных числовых значений, содержащей дискретные числовые значения 432, 434 и 436, соответствующие электрическому импульсу 422 с точки зрения времени и дискретной числовой величины, связанных с отраженным оптическим импульсом 414.
[135] Например, преобразователь 402 АЦП может работать с частотой синхронизации 1 ГГц. Поэтому преобразователь 402 АЦП может выдавать дискретное числовое значение, связанное с электрическим импульсом 422, с периодом 1 нс. В представленном выше примере преобразователь 402 АЦП может выдать три отсчета для импульса, поскольку длительность электрического импульса 422 равна 3 нс. Дискретное числовое значение 432 может представлять начальное значение или значение вблизи начала обратного оптического импульса 414, дискретное числовое значение 434 может представлять числовое значение, которое может быть равно пиковому значению или значению вблизи пика обратного оптического импульса 414, а дискретное числовое значение 436 может представлять конечное значение или значение вблизи конца обратного оптического импульса 414. Тем не менее, предполагается, что количество отсчетов, приходящихся на электрический импульс, может изменяться в зависимости от длительности электрического импульса 422 и рабочей частоты синхронизации АЦП. В некоторых вариантах осуществления изобретения длительность электрического импульса 422 может иметь любое другое значение в зависимости от длительности обратного оптического импульса 414. Кроме того, рабочая частота синхронизации может зависеть от конфигурации аппаратных средств, связанных с лидарной системой 310.
[136] Как показано, дискретное числовое значение 432 может быть представлено в момент времени t=4 нс, дискретное числовое значение 432 может быть представлено в момент времени t=4 нс, дискретное числовое значение 434 может быть представлено в момент времени t=5 нс, а дискретное числовое значение 436 может быть представлено в момент времени t=6 нс. Таким образом, дискретные числовые значения 432, 434 и 436 могут представлять собой величины, связанные с отраженным оптическим импульсом 414 в соответствующие моменты времени. Как описано выше, отправленный оптический импульс 412 начинается в момент времени t=0, достигает пика в момент времени t=1,5 нс и заканчивается в момент времени t=3 нс. В некоторых вариантах осуществления изобретения эти моменты времени могут быть заранее известны в лидарной системе 310. Например, эти моменты времени могут храниться в памяти 406 и лидарная система 310 может сообщать эти моменты времени процессору 404. Используя эти моменты времени вместе с моментами времени, связанными с дискретными числовыми значениями 432, 434 и 436, процессор 404 может рассчитывать первоначальное время прохождения отправленного оптического импульса 412. Таким образом, процессор 404 с использованием уравнения (1) может рассчитывать расстояние 390 между объектом 330 и лидарной системой 310. Следует учитывать, что первоначальное время прохождения, рассчитанное процессором 404, может быть неточным вследствие ограниченного разрешения преобразователя 402 АЦП.
[137] В некоторых вариантах осуществления изобретения процессор 404 может преобразовывать моменты времени, связанные с последовательностью дискретных числовых значений 432, 434 и 436, в значения расстояния. Фиг. 8 содержит представление 440 последовательности 441 дискретных числовых значений, содержащей дискретные числовые значения 442, 444 и 446, представляющие последовательность дискретных числовых значений 432, 434 и 436 с точки зрения значений расстояния, согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии. Соответствующие дискретным числовым значениям 432, 434 и 435, связанным с моментами времени t=4 нс, 5 нс и 6 нс, значения расстояния, связанные с дискретными числовыми значениями 442, 444 и 446, равны 60 см, 75 см и 90 см, соответственно. Эти преобразования могут быть выполнены согласно уравнению (1). Следует отметить, что фиг. 5-8 использованы лишь для иллюстрации без соблюдения масштаба. Кроме того, значения на вертикальных и горизонтальных осях на фиг. 5-8 представляют собой не имеющие ограничительного характера значения согласно различным вариантам осуществления изобретения.
[138] Предполагается, что для расчета расстояния 390 процессор 404 может использовать по меньшей мере один из моментов времени, связанных с последовательностью дискретных числовых значений 432, 434 и 436, или по меньшей мере одно из значений расстояния, связанных с дискретными числовыми значениями 442, 444 и 446.
[139] Например, если процессор 404 использует моменты времени, связанные с последовательностью дискретных числовых значений 432, 434 и 436 (см. фиг. 7), для расчета расстояния 390, то процессор 404 может выполнять свои расчеты на основе начала, пика или конца отправленного оптического импульса 412 и отраженного оптического импульса 414. Если учитываются момент времени t=0, связанный с началом отправленного оптического импульса 412, и момент времени t=4 нс, связанный с дискретным числовым значением 432, то процессор 404 может рассчитать расстояние согласно уравнению (1), т.е.  (см), что составляет 60 см. Аналогично, если учитываются момент времени t=1,5 нс, связанный с пиком отправленного оптического импульса 412, и момент времени t=5 нс, связанный с дискретным числовым значением 434, то процессор 404 может рассчитать расстояние согласно уравнению (1), т.е.
(см), что составляет 60 см. Аналогично, если учитываются момент времени t=1,5 нс, связанный с пиком отправленного оптического импульса 412, и момент времени t=5 нс, связанный с дискретным числовым значением 434, то процессор 404 может рассчитать расстояние согласно уравнению (1), т.е.  (см), что составляет 52,5 см. Если учитываются момент времени t=3 нс, связанный с концом отправленного оптического импульса 412, и момент времени t=6 нс, связанный с дискретным числовым значением 436, то процессор 404 может рассчитать расстояние согласно уравнению (1), т.е.
(см), что составляет 52,5 см. Если учитываются момент времени t=3 нс, связанный с концом отправленного оптического импульса 412, и момент времени t=6 нс, связанный с дискретным числовым значением 436, то процессор 404 может рассчитать расстояние согласно уравнению (1), т.е.  (см), что составляет 45 см.
(см), что составляет 45 см.
[140] С другой стороны, процессор 404 для расчета расстояния 390 также может использовать значения расстояния, связанные с дискретными числовыми значениями 442, 444 и 446 (см. фиг. 8). В этом случае процессор 404 с использованием уравнения (1) может преобразовать моменты времени t=0 нс, 1,5 нс и 3 нс, связанные с началом, пиком и концом отправленного оптического импульса 412, в значения расстояния 0 см, 22,5 см и 45 см. Процессор 404 может использовать любое из этих значений расстояния и соответствующее значение расстояния, такое как 60 см, 75 см или 90 см, связанное с одним из дискретных числовых значений 442, 444 и 446, для расчета расстояния между объектом 330 и лидарной системой 310. Например, процессор 404 может рассчитывать это расстояние на основе разности между соответствующими значениями расстояния. Например, 60-0=60 см, 75-22,5=52,5 см, и 90-45=45 см.
[141] Предполагается, что в любом из представленных выше случаев, т.е. когда процессор 404 использует для расчета расстояния 390 моменты времени, связанные с последовательностью дискретных числовых значений 432, 434 и 436 (см. фиг. 7), или значения расстояния, связанные с дискретными числовыми значениями 442, 444, 446, расстояние, рассчитанное на основе начала, пика или конца отправленного оптического импульса 412 и отраженного оптического импульса 414 получается равным 45 см, 52,5 см, или 60 см, соответственно.
[142] При этом в представленном выше примере фактическое значение расстояния 390 равно 50 см. Следует отметить, что моменты времени, соответствующие приблизительному началу, приблизительному пику и приблизительному концу отраженного оптического импульса 414, обычно могут быть использованы для точного определения времени прохождения отправленного оптического импульса 412 и, следовательно, для точного определения расстояния 390. Несмотря на то, что фактические моменты времени, соответствующие началу, пику и концу отраженного оптического импульса, равны t=3,33 нс, t=4,83 нс и t=6,33 нс, соответственно, дискретные числовые значения 432, 434 и 436, представляющие приблизительное начало, приблизительный пик и приблизительный конец отраженного оптического импульса 414, рассчитаны как t=4 нс, t=5 нс и t=6 нс, соответственно.
[143] Таким образом, из-за дискретного характера выходных данных преобразователя 402 АЦП и ограничения рабочей частоты синхронизации лидарной системе 310 затруднительно точно определять расстояние 390. Следует отметить, что пространственное и/или временное разрешение преобразователя 402 АЦП ограничивается рабочей частотой синхронизации. Например, в этом случае преобразователь 402 АЦП, работающий с частотой синхронизации 1 ГГц, способен обеспечить пространственное разрешение ±15 см и временное разрешение 1 нс. Такое разрешение для транспортных средств, таких как транспортное средство 220, работающее в режиме самоуправления, может быть недостаточным с точки зрения безопасности.
[144] Чтобы дополнительно повысить это разрешение, например, до ±1 см (что соответствует дискретным числовым значениям чрез каждые 0,033 нс), в некоторых вариантах осуществления изобретения процессор 404 может заранее наполнять библиотеку 700 (описано ниже), включая шаблонные профили 600 импульсов (описано ниже), и может хранить в памяти 406 библиотеку 700 (описано ниже). Процесс такого наполнения библиотеки 700 (описана ниже) может включать в себя работу лидарной системы 310 в контролируемых рабочих условиях и определение параметров разрешения. Такие рабочие условия могут включать в себя изменение расстояния между тестовым объектом 508 (описано ниже) и лидарной системой 310, изменение вида материала тестового объекта 508 (описано ниже) и т.д. Параметры разрешения могут включать в себя значение времени и/или значение расстояния.
[145] На фиг. 9 проиллюстрирована работа лидарной системы 310 в контролируемых рабочих условиях для наполнения библиотеки 700 (описано ниже) согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии. Как показано, лидарная система 310 излучает тестовый выходной оптический импульс 502 (также называется отправленным тестовым оптическим импульсом) в направлении тестового объекта 508. В некоторых вариантах осуществления изобретения тестовый объект 508 может иметь соответствующий вид и может быть размещен на заранее заданном расстоянии 506 от лидарной системы 310. Вид тестового объекта 508 может соответствовать пешеходам, велосипедистам, другим транспортным средствам (неподвижным или подвижным) и т.п. Таким образом, различные виды тестового объекта могут иметь различные материалы с различными характеристиками отражения. В некоторых вариантах осуществления изобретения для наполнения библиотеки 700 (описано ниже) может изменяться вид материала тестового объекта 508 и расстояние 506. Например, не имеющие ограничительного характера виды материалов могут включать в себя металл, пластмассу, стекло, ткани, резину, бетон, кожу человека, кожу животных (кошек, собак и т.д.) и т.п.
[146] Отправленный тестовый оптический импульс 502 может быть отражен тестовым объектом 508 в виде обратного тестового оптического импульса 504 (также называется отраженным тестовым оптическим импульсом) в направлении лидарной системы 310. Подобно описанному выше со ссылками на фиг. 3, элемент 318 приемника, связанный с лидарной системой 310, может преобразовывать отраженный тестовый оптический импульс 504 в соответствующий электрический импульс (не показан). Лидарная система 310 может отправлять электрический импульс (не показан), связанный с отраженным тестовым оптическим импульсом 504, в преобразователь 402 АЦП. Преобразователь 402 АЦП может осуществлять выборку и преобразование электрического импульса в шаблонный профиль импульса, содержащий последовательность дискретных числовых значений.
[147] Преобразователь 402 АЦП может предоставлять шаблонный профиль импульса процессору 404 для дальнейшей обработки. Например, такая обработка может включать в себя преобразование значений времени, связанных с последовательностью дискретных числовых значений, в значения расстояния с использованием уравнения (1), определение параметра разрешения и наполнение библиотеки 700 (описано ниже). На фиг. 10 представлены шаблонные профили 600 импульсов, сформированные процессором 404, согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии. Как показано, шаблонные профили 600 импульсов включают в себя шаблонные профили 602, 604 и 606 импульсов. Следует отметить, что для простоты представлены лишь три профиля. Тем не менее, шаблонные профили 600 импульсов могут включать в себя любое подходящее для данного варианта применения количество шаблонных профилей импульсов, в зависимости от конфигурации и требований лидарной системы 310.
[148] Следует отметить, что в некоторых вариантах осуществления изобретения преобразователь 402 АЦП работает с одинаковой частотой синхронизации при работе лидарной системы 310 в контролируемых рабочих условиях и в ситуации реального времени. Как описано выше, в примере преобразователь 402 АЦП работает с частотой синхронизации 1 ГГц, следовательно, шаблонные профили 600 импульсов обеспечивают временное разрешение 1 нс или, иными словами, пространственное разрешение 15 см. Тем не менее, для тестового объекта 508 того же вида каждый профиль в шаблонных профилях 600 импульсов формируется путем изменения расстояния 506 до тестового объекта 508 с заранее заданным шагом в контролируемых условиях. Иными словами, например, если электрический импульс, связанный с отраженным тестовым оптическим импульсом 504, оцифровывается для тестового объекта 508, находящегося на 15 различных известных расстояниях от лидарной системы 310, то шаблонные профили 600 импульсов могут включать в себя 15 различных шаблонных профилей импульсов для тестового объекта 508 (каждый для соответствующего расстояния до объекта).
[149] В некоторых вариантах осуществления изобретения для повышения разрешения лидарной системы 310 положение тестового объекта 508 относительно лидарной системы 310, связанное с одним из шаблонных профилей 600 импульсов, соответствует расстоянию, связанному с отметками разрешения преобразователя 402 АЦП. Например, если преобразователь 402 АЦП работает с частотой синхронизации 1 ГГц, то преобразователь 402 АЦП может иметь разрешение 0, 15, 30, 45 см и т.д. С этой целью тестовый объект 508 первоначально может размещаться на расстоянии 0 см, или 15 см, или 30 см, или 45 см и т.д.
[150] Экспериментально это можно объяснить тем фактом, что для тестового объекта 508 одного и того же вида один из шаблонных профилей 600 импульсов, сформированных для тестового объекта 508, расположенного на расстоянии 0 см, 15 см, 30 см или 45 см и т.д., может иметь одинаковый вид по величине. Тем не менее, абсолютное значение амплитуды может быть обратно пропорциональным квадрату расстояния 506 до тестового объекта 506. Например, если тестовый объект 508 расположен на расстоянии 30 см от лидарной системы 310, то соответствующий шаблонный профиль импульса может быть подобен шаблонному профилю импульса для тестового объекта 508, расположенного на расстоянии 45 см.
[151] Кроме того, каждый последующий шаблонный профиль импульса в шаблонных профилях 600 импульсов может быть сформирован для тестового объекта 508, сдвинутого, в частности, на 1 см относительно предыдущего положения тестового объекта 508. Например, если тестовый объект 508 для шаблонного профиля 602 импульса расположен на расстоянии 45 см, то следующий шаблонный профиль 604 импульса может быть сформирован путем размещения тестового объекта 508 на расстоянии 46 см и т.д.
[152] В некоторых вариантах осуществления изобретения преобразователь 402 АЦП может предоставлять шаблонный профиль импульса, например, шаблонный профиль 602 импульса, процессору 404. Процессор 404 может определять параметр разрешения для шаблонного профиля 602 импульса на основе заранее заданного расстояния 506. Такие параметры разрешения могут включать в себя значение времени и/или значение расстояния, связанное с отраженным тестовым оптическим импульсом 504 и с тестовым объектом 508. В некоторых вариантах осуществления изобретения длительность импульса, связанная с отправленным тестовым оптическим импульсом 502, может быть равна длительности импульса, связанной с отправленным оптическим импульсом 412. В этом примере длительность отправленного тестового оптического импульса 502 равна 3 нс, тестовый объект 508 расположен на расстоянии 45 см от лидарной системы 310, а вид материала тестового объекта 508 соответствует пластмассе.
[153] Лидарная система 310 может передать отправленный тестовый оптический импульс 502 в направлении тестового объекта 508 в момент времени t=0. Отправленный тестовый оптический импульс 502 в результате взаимодействия с тестовым объектом 508 может отразиться как отраженный тестовый оптический импульс 504. Поскольку тестовый объект 508 расположен на расстоянии 45 см от лидарной системы 310, отраженный тестовый оптический импульс 504 может быть принят в момент времени t=3 нс и длиться до момента времени t=6 нс. Преобразователь 402 АЦП может выдать дискретное числовое значение в момент времени t=3 нс, соответствующий приблизительному началу отраженного тестового оптического импульса 504, дискретное числовое значение в момент времени t=5 нс, соответствующий приблизительному пику отраженного тестового оптического импульса 504, и дискретное числовое значение в момент времени t=6 нс, соответствующий приблизительному концу отраженного тестового оптического импульса 504.
[154] Процессор 404 может преобразовывать дискретные числовые значения, представляющие моменты времени и амплитуды, связанные с отраженным тестовым оптическим импульсом 504, в дискретные числовые значения, представляющие расстояния и амплитуды. В некоторых вариантах осуществления изобретения дискретные числовые значения, представляющие расстояния и амплитуды, могут соответствовать шаблонному профилю 602 импульса, как показано на фиг. 10. Кроме того, процессор 404 с использованием шаблонного профиля 602 импульса может рассчитывать расстояние 506 между объектом 508 и лидарной системой 310. Поскольку в этом примере момент времени t=3 нс, соответствующий приблизительному началу отраженного тестового оптического импульса 504, соответствует фактическому моменту времени приема отраженного тестового оптического импульса 504, то рассчитанное расстояние 506 равно фактическому расстоянию. Таким образом, компенсация расстояния, связанная с параметром разрешения для шаблонного профиля 602 импульса, может быть равна нулю.
[155] Для того же вида материала тестового объекта 508 (т.е. для пластмассы) расстояние 506 может быть увеличено на 1 см, т.е. расстояние 506 становится равным 46 см. Лидарная система 310 может передать отправленный тестовый оптический импульс 502 в направлении тестового объекта 508 в момент времени t=0. Отправленный тестовый оптический импульс 502 в результате взаимодействия с тестовым объектом 508 может отразиться как отраженный тестовый оптический импульс 504. Поскольку тестовый объект 508 расположен на расстоянии 46 см от лидарной системы 310, отраженный тестовый оптический импульс 504 может быть принят приблизительно в момент времени t=3,067 нс и длиться до момента времени t=6,067 нс.
[156] Поскольку в этом примере преобразователь 402 АЦП работает с частотой синхронизации 1 ГГц, преобразователь 402 АЦП может выдавать дискретные числовые значения с периодом 1 нс. Поскольку отраженный тестовый оптический импульс 504 принимается после момента времени t=3 нс, преобразователь 402 АЦП может выдать следующее дискретное числовое значение в момент времени t=4 нс, соответствующий приблизительному началу отраженного тестового оптического импульса 504. В момент времени t=5 нс преобразователь 402 АЦП может выдать дискретное числовое значение, соответствующее приблизительному пику отраженного тестового оптического импульса 504. Кроме того, поскольку отраженный тестовый оптический импульс 504 длится до момента времени t=6,067 нс, преобразователь 402 АЦП может выдать дискретное числовое значение в момент времени t=6 нс, соответствующее приблизительному концу отраженного тестового оптического импульса 504.
[157] Как описано выше, процессор 404 может преобразовывать дискретные числовые значения, представляющие моменты времени и амплитуды, связанные с отраженным тестовым оптическим импульсом 504, в дискретные числовые значения, представляющие расстояние и амплитуду. В некоторых вариантах осуществления изобретения дискретные числовые значения, представляющие расстояние и амплитуду, могут соответствовать шаблонному профилю 604 импульса, как показано на фиг. 10. Кроме того, процессор 404 с использованием шаблонного профиля 604 импульса может рассчитывать расстояние 506 между объектом 508 и лидарной системой 310.
[158] В этом примере момент времени t=4 нс, соответствующий приблизительному началу отраженного тестового оптического импульса 504, не соответствует фактическому моменту времени приема отраженного тестового оптического импульса 504. Момент времени t=5 нс, соответствующий приблизительному пику отраженного тестового оптического импульса 504, не соответствует фактическому моменту времени пика отраженного тестового оптического импульса 504. Кроме того, момент времени t=6 нс, соответствующий приблизительному концу отраженного тестового оптического импульса 504, не соответствует фактическому моменту времени конца отраженного тестового оптического импульса 504.
[159] В некоторых вариантах осуществления изобретения процессор 404 для расчета расстояния 506 может использовать момент времени t=4 нс, соответствующий приблизительному началу отраженного тестового оптического импульса 504, момент времени t=5 нс, соответствующий приблизительному пику отраженного тестового оптического импульса 504, момент времени t=6 нс, соответствующий приблизительному концу отраженного тестового оптического импульса 504 или все эти моменты времени. Для момента времени t=4 нс рассчитанное расстояние 506 получается равным 60 см. Для момента времени t=5 нс рассчитанное расстояние 506 получается равным 52,5 см. Для момента времени t=6 нс рассчитанное расстояние 506 получается равным 45 см. Для всех представленных выше случаев рассчитанное расстояние не равно фактическому расстоянию. В этом случае процессор 404 рассчитывает для шаблонного профиля 602 импульса степень компенсации расстояния, связанную с параметром разрешения.
[160] Процессор 404 может иметь априорную информацию о фактическом расстоянии от лидарной системы 310 до тестового объекта 508. С использованием этой априорной информации процессор 404 может определять степень компенсации расстояния, связанную с параметром разрешения. С этой целью процессор 404 может сравнивать рассчитанное расстояние 506 с фактическим расстоянием и рассчитывать значение разности в качестве компенсации расстояния. Например, если фактическое расстояние составляет 46 см, а для момента времени t=4 нс рассчитанное расстояние 506 получается равным 60 см, то компенсация расстояния может быть равна разности между фактическим расстоянием и рассчитанным расстоянием, т.е. -14 см. Для момента времени t=5 нс рассчитанное расстояние 506 получается равным 52,5 см. В этом случае компенсация расстояния может быть равна -6,5 см. Для момента времени t=6 нс рассчитанное расстояние 506 получается равным 45 см. В этом случае компенсация расстояния может быть равна -1 см.
[161] В некоторых не имеющих ограничительного характера вариантах осуществления изобретения процессору 404 может быть предоставлена априорная информация о фактических моментах времени начала, пика и конца отраженного тестового оптического импульса 504. Процессор 404 может рассчитывать параметры разрешения для компенсации времени на основе разности между фактическими моментами времени и рассчитанными моментами времени, соответствующими приблизительному началу, приблизительному пику и приблизительному концу отраженного тестового оптического импульса 504. Предполагается, что в некоторых вариантах осуществления изобретения лидарная система 310 может рассчитывать параметры разрешения для компенсации времени на основе времени приблизительного начала, приблизительного пика или приблизительного конца отраженного тестового оптического импульса 504. Различные элементы могут быть откалиброваны соответствующим образом на основе вида моментов времени, используемых для расчета параметров разрешения для компенсации времени.
[162] Например, в описанном выше примере материал тестового объекта 508, размещенного на расстоянии 46 см от лидарной системы 310, представляет собой пластмассу. Фактические моменты времени, соответствующие началу, пику и концу отраженного тестового оптического импульса 504, могут быть равны 3,067 нс, 4,567 нс и 6,067 нс, соответственно. Например, момент времени, соответствующий пику отраженного тестового оптического импульса 504, может быть равен среднему значению моментов времени, соответствующих началу и концу отраженного тестового оптического импульса 504.
[163] Как описано выше, преобразователь 402 АЦП может выдать дискретное числовое значение в моменты времени 4 нс, 5 нс и 6 нс приблизительного начала, приблизительного пика и приблизительного конца отраженного тестового оптического импульса 504. Для расчета параметров разрешения для компенсации времени процессор 404 может рассчитывать разность между фактическими моментами времени и рассчитанными моментами времени. Например, параметр разрешения для компенсации времени, соответствующий приблизительному началу отраженного оптического импульса 504, может быть равен разности между моментом времени фактического начала отраженного тестового оптического импульса 504 и соответствующим рассчитанным моментом времени. В этом случае разность может быть равна -0,933 нс. Аналогично, параметр разрешения для компенсации времени, соответствующий приблизительному пику и приблизительному концу отраженного оптического импульса 504, может быть равен -0,433 нс и +0,067 нс, соответственно. Процессор 404 может рассчитывать параметры разрешения для компенсации времени для различных видов тестового объекта 508, размещенного на различных расстояниях от лидарной системы 310. В некоторых вариантах осуществления изобретения процессор 404 может использовать параметр разрешения для компенсации времени с целью определения фактического времени прохождения для объекта 330.
[164] Рассчитав параметры разрешения для компенсации времени и параметры разрешения для компенсации расстояния, процессор 404 может наполнять библиотеку 700 (описано ниже) записями для различных шаблонных профилей 600 импульсов. Такая запись может указывать на соответствующий шаблонный профиль импульса, такой как профиль 602, 604 или 606, на вид материала тестового объекта 508, такой как пластмасса, резина, метал, бетон и т.п., на соответствующие параметры разрешения, такие как компенсация расстояния и/или компенсация времени. В некоторых вариантах осуществления изобретения запись также может содержать среднюю мощность и/или среднюю энергию, связанную с отраженным тестовым оптическим импульсом 504 для конкретного тестового объекта 508, размещенного на конкретном расстоянии 506.
[165] На фиг. 11 представлена структура библиотеки 700, наполненной процессором 404, согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии. В некоторых вариантах осуществления изобретения процессор 404 может наполнять библиотеку 700 списком шаблонных профилей 600 импульсов в сочетании с различными связанными записями. Как показано, библиотека 700 может содержать вид материала тестового объекта из множества видов материала тестовых объектов, расстояние, на котором тестовый объект расположен относительно лидарной системы 310, параметры разрешения и шаблонные профили 600 импульсов. В некоторых не имеющих ограничительного характера вариантах осуществления изобретения библиотека 700 может дополнительно содержать нормализованную среднюю мощность, связанную с отраженным тестовым оптическим импульсом 504. Нормализация средней мощности может включать в себя деление средней мощности на максимальную мощность, связанную с отправленным тестовым оптическим импульсом 502.
[166] Библиотека 700 показана как содержащая параметры разрешения для компенсации времени и параметры разрешения для компенсации расстояния. Тем не менее, в некоторых вариантах осуществления изобретения библиотека 700 может содержать только параметры разрешения для компенсации времени или только параметры разрешения для компенсации расстояния. Кроме того, наполнение библиотеки 700 параметрами разрешения для компенсации времени, связанными с приблизительным началом, приблизительным пиком и приблизительным концом отраженного тестового оптического импульса 504, приведено лишь для примера, а не в ограничительных целях. Например, в некоторых вариантах осуществления изобретения библиотека 700 может содержать параметры разрешения для компенсации времени, связанные с приблизительным началом и/или с приблизительным пиком и/или с приблизительным концом отраженного тестового оптического импульса 504. Аналогично, наполнение библиотеки 700 параметрами разрешения для компенсации расстояния, связанными с приблизительным началом, приблизительным пиком и приблизительным концом отраженного тестового оптического импульса 504, приведено лишь для примера, а не в ограничительных целях. Например, в некоторых вариантах осуществления изобретения библиотека 700 может содержать параметры разрешения для компенсации расстояния, связанные с приблизительным началом и/или с приблизительным пиком и/или с приблизительным концом отраженного тестового оптического импульса 504.
[167] Для определенного вида материала тестового объекта 508, такого как пластмасса, резина, метал, бетон и т.п., тестовый объект 508 может размещаться на различных расстояниях, например, 45 см, 46 см, 47 см и т.д. Затем процессор 404 может рассчитывать параметры разрешения, как описано выше. В некоторых вариантах осуществления изобретения процессор 404 для расчета параметра разрешения может использовать начало отправленного тестового оптического импульса 502 и момент времени, связанный с дискретным числовым значением, соответствующим приблизительному началу отраженного тестового оптического импульса 504. В некоторых вариантах осуществления изобретения процессор 404 для расчета параметра разрешения использует конец отправленного тестового оптического импульса 502 и момент времени, связанный с дискретным числовым значением, соответствующим приблизительному концу отраженного тестового оптического импульса 504.
[168] Следует отметить, что расчет параметра разрешения не должен ограничиваться началом или концом оптических импульсов. Например, в некоторых вариантах осуществления изобретения процессор 404 может использовать пиковые значения отправленного тестового оптического импульса 502 и момент времени, связанный с дискретным числовым значением, соответствующим приблизительному пику отраженного тестового оптического импульса 504. В некоторых не имеющих ограничительного характера вариантах осуществления изобретения процессор 404 может рассчитывать среднюю мощность отраженного тестового оптического импульса 504, выполнять нормализацию рассчитанной средней мощности и сохранять ее в библиотеке 700.
[169] Предполагается, что мощность отраженного оптического импульса 504 может зависеть от вида тестового объекта 508. Например, если выбранный тестовый объект 508 представляет собой транспортное средство, то мощность, связанная с отраженным тестовым оптическим импульсом 504, может быть больше мощности, связанной с отраженным тестовым оптическим импульсом 504, когда вид материала тестового объекта 508 соответствует пластмассе. Одна из причин изменения мощности заключается в различии характеристики отражения тестового объекта 508. Такой вид материала тестового объекта 508, как метал, может иметь высокий коэффициент отражения и, следовательно, мощность отраженного тестового оптического импульса 504 может быть больше по сравнению с таким видом материала тестового объекта 508, как пластмасса. Таким образом, различные характеристики отражения тестового объекта 508 могут сдвигать пик отраженного тестового оптического импульса 504 и пик соответствующих дискретных числовых значений.
[170] После создания и наполнения библиотеки 700 процессор 404 может сохранять библиотеку 700 в памяти 406. Лидарная система 310 может обращаться к библиотеке 700 для повышения разрешения преобразователя 402 АЦП и для повышения точности измерения расстояния между объектом 330 и лидарной системой 310 в условиях на этапе использования. Условия на этапе использования могут соответствовать условиям, когда лидарная система 310 используется для управления транспортным средством 220. Следует отметить, что до получения последовательности 431 дискретных числовых значений процессор 404 может наполнять библиотеку 700 списком шаблонных профилей 600 импульсов в сочетании с различными связанными записями. Следует отметить, что библиотека 700 показана как содержащая ограниченное количество видов материалов тестовых объектов, размещенных на ограниченном количестве расстояний, исключительно для простоты.
[171] Библиотека 700 может содержать любое количество различных видов материалов тестовых объектов, имеющих различные характеристики отражения и размещенных на любом количестве расстояний, в зависимости от конфигурации лидарной системы 310 и соответствующих компоновок. Такие компоновки могут включать в себя различные виды объектов, размещенных на различных расстояниях от лидарной системы 310. Кроме того, указанные для иллюстрации значения нормализованной средней мощности отраженного тестового оптического импульса 504 представляют собой лишь примеры, а не фактические значения. Такие примеры основаны на том, что металлический тестовый объект 508 может иметь больший коэффициент отражения, чем пластмассовый тестовый объект 508. Следовательно, отраженный тестовый оптический импульс 504, отраженный от металлического тестового объекта 508, может иметь бóльшую мощность, чем отраженный тестовый оптический импульс 504, отраженный от пластмассового тестового объекта 508. Кроме того, мощность отраженного оптического импульса 504 может уменьшаться с увеличением расстояния между лидарной системой 310 и тестовым объектом 508.
[172] На фиг. 3 показана лидарная система 310 на этапе использования. Как описано выше, лидарная система 310 может передавать отправленный оптический импульс 412 в направлении объекта 330. Таким образом, отправленный оптический импульс 412 после взаимодействия с объектом 330 может отражаться в направлении лидарной системы 310 как отраженный оптический импульс 414. Лидарная система 310 может передавать отраженный оптический импульс 414 в элемент 318 приемника. Элемент 318 приемника может формировать электрический импульс 422, представляющий отраженный оптический импульс 414.
[173] Преобразователь 402 АЦП может преобразовывать электрический импульс 422 в последовательность 431 дискретных числовых значений, содержащую дискретные числовые значения 432, 434 и 436. Преобразователь 402 АЦП может выдавать последовательность 431 дискретных значений в процессор 404. Процессор 404 также может обращаться к заранее наполненной библиотеке 700, хранящейся в памяти 406, для получения параметра разрешения. При этом процессор 404 может определять параметр сходства между последовательностью 431 дискретных числовых значений и каждым шаблонным профилем импульса, связанным с шаблонными профилями 600 импульсов. Следует отметить, что в некоторых вариантах осуществления изобретения до обращения к заранее наполненной библиотеке 700 процессор 404 может наполнять библиотеку 700, как описано выше.
[174] В некоторых вариантах осуществления изобретения для определения параметра сходства процессор 404 может сравнивать все дискретные числовые значения 432, 434 и 436 из последовательности 431 дискретных числовых значений со всеми дискретными числовыми значениями из последовательности дискретных числовых значений, связанных с соответствующим шаблонным профилем импульса из списка шаблонных профилей 600 импульсов. При выполнении операции сравнения процессор 404 может последовательно обрабатывать все шаблонные профили импульсов из списка шаблонных профилей 600 импульсов. С этой целью в некоторых вариантах осуществления изобретения процессор 404 может рассчитывать параметр корреляции, определяющий параметр сходства между последовательностью 431 дискретных числовых значений и каждым шаблонным профилем импульса, связанным с шаблонными профилями 600 импульсов. В других вариантах осуществления изобретения процессор 404 может использовать метод минимальной среднеквадратичной ошибки для определения параметра сходства между последовательностью 431 дискретных числовых значений и каждым шаблонным профилем импульса, связанным с шаблонными профилями 600 импульсов.
[175] В некоторых вариантах осуществления изобретения процессор 404 может получать из библиотеки 700 параметр разрешения, соответствующий шаблонному профилю импульса из числа по меньшей мере некоторых шаблонных профилей импульса из списка шаблонных профилей 600 импульсов, имеющий наибольший параметр сходства. Процессор 404 может использовать полученный параметр разрешения для определения расстояния от лидарной системы 310 до объекта 330. Например, если шаблонный профиль 604 импульса имеет наибольший параметр сходства, соответствующий последовательности 431 дискретных числовых значений, содержащей дискретные числовые значения 432, 434 и 436, то процессор 404 может получать из библиотеки 700 параметры разрешения для компенсации времени и/или расстояния. Поскольку в одном примере шаблонный профиль 604 импульса соответствует виду материала «пластмасса» тестового объекта 508, расположенного на расстоянии 46 см от лидарной системы 310, то связанные параметры разрешения для компенсации времени могут включать в себя соответствующие значения времени -0,933 нс, -0,433 нс и +0,067 нс. Кроме того, параметры разрешения для компенсации расстояния могут включать в себя соответствующие значения расстояния -14 см, -6,5 см и +1 см. С использованием по меньшей мере одного из значений времени, связанного с параметрами разрешения для компенсации времени, и/или по меньшей мере одного из значений расстояния, связанного с параметрами разрешения для компенсации расстояния, процессор 404 может определять расстояние от лидарной системы 310 до объекта 330.
[176] Предполагается, что значения времени, связанные с параметрами разрешения для компенсации времени, могут добавляться или вычитаться из соответствующих рассчитанных моментов времени, таких как приблизительное начало, приблизительный пик или приблизительный конец, в зависимости от значений времени, связанных с параметрами разрешения для компенсации времени. Например, если связанное значение времени отрицательное, то оно вычитается из рассчитанного соответствующего момента времени, а если связанное значение времени положительное, то оно добавляется к рассчитанному соответствующему моменту времени.
[177] Аналогично, значения расстояния, связанные с параметрами разрешения для компенсации расстояния, могут добавляться или вычитаться из рассчитанного соответствующего расстояния от лидарной системы 310 до объекта 330. Например, если связанное значение расстояния отрицательное, то оно вычитается из рассчитанного расстояния от лидарной системы 310 до объекта 330, а если связанное значение расстояния положительное, то оно добавляется к рассчитанному расстоянию от лидарной системы 310 до объекта 330.
[178] В некоторых вариантах осуществления изобретения процессор 404 также может получать вид материала тестового объекта 508, связанный с шаблонным профилем импульса, имеющим наибольший параметр сходства. Следует отметить, что в некоторых не имеющих ограничительного характера вариантах осуществления изобретения процессор 404 при расчете параметра сходства также может использовать нормализованную среднюю мощность, связанную с последовательностью 431 дискретных числовых значений. Таким образом, процессор 404 может сравнивать профиль последовательности 431 дискретных числовых значений с профилями из числа шаблонных профилей 600 импульсов и сравнивать рассчитанную нормализованную среднюю мощность с нормализованными средними мощностями, хранящимися в библиотеке 700, чтобы дополнительно определять вид материала тестового объекта 508.
[179] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 404 может дополнительно использовать алгоритм машинного обучения (MLA, Machine Learning Algorithm), обученный прогнозированию наибольшего параметра сходства и вида тестового объекта 508 на основе списка шаблонных профилей 600 импульсов и связанных записей, хранящихся в библиотеке 700.
[180] В некоторых вариантах осуществления изобретения список шаблонных профилей 600 импульсов и связанные записи, хранящиеся в библиотеке 700, могут быть поданы в качестве обучающих входных данных в алгоритм MLA. В некоторых не имеющих ограничительного характера вариантах осуществления изобретения список шаблонных профилей 600 импульсов, содержащий различные дискретные числовые значения, и связанные записи могут быть поданы в подходящий алгоритм MLA, например, в качестве входных данных для нейронной сети прямого распространения (feed-forward) или для сверточной нейронной сети (CNN, Convolutional Neural Network). При этом сеть CNN на основе обучающих входных данных может выдавать в качестве меток параметры разрешения, соответствующие наибольшему параметру сходства и виду тестового объекта 508. После обучения алгоритма MLA прогнозированию таких меток алгоритм MLA используется для формирования улучшенных прогнозов наибольшего параметра сходства и вида объекта 330.
[181] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии лидарная система 310 может быть связана с транспортным средством 220. Таким образом, транспортное средство 220 может быть реализовано в виде самоуправляемого автомобиля. Процессор 404, связанный с лидарной системой 310, может управлять работой транспортного средства 220 на основе рассчитанного расстояния 390 от лидарной системы 310 до объекта 330. В некоторых вариантах осуществления изобретения управление процессором 404 работой транспортного средства 220 может основываться на полученном виде тестового объекта 508. Такое управление работой может включать в себя ускорение, торможение, остановку, перестроение в другой ряд, самостоятельную парковку и т.д.
[182] Фиг. 12 содержит отображение 800 последовательности 802 дискретных числовых значений, содержащей дискретные числовые значения 804, 806, 808, соответствующие расстоянию, связанному с отраженным оптическим импульсом в условиях на этапе использования, согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии. Предполагается, что несмотря на то, что последовательность 802 дискретных числовых значений содержит три дискретных цифровых значения, в различных не имеющих ограничительного характера вариантах осуществления изобретения количество дискретных числовых значений в последовательности 802 дискретных числовых значений может быть значительно больше трех, в зависимости от длительности отправленного и отраженного оптического импульса и частоты синхронизации, с которой работает лидарная система 310 и ее элементы.
[183] В некоторых вариантах осуществления изобретения представление 800 последовательности 802 дискретных числовых значений, содержащей дискретные числовые значения 804, 806 и 808, соответствует условиям на этапе использования. Например, транспортное средство 220 находится на дороге и связанная с ним лидарная система 310 сканирует объект на этапе использования в окрестности транспортного средства 220. При определении объекта на этапе использования на дороге лидарная система 310 может формировать представление 800 последовательности 802 дискретных числовых значений, содержащее дискретные числовые значения 804, 806 и 808, с использованием представленной в настоящем описании технологии.
[184] Затем лидарная система 310 обращается к библиотеке 700 с целью определения параметров разрешения для компенсации времени и/или параметров разрешения для компенсации расстояния. При этом для определения параметров сходства лидарная система 310 может сравнивать полную последовательность 802 дискретных числовых значений с каждым шаблонным профилем импульса из числа шаблонных профилей 600 импульсов.
[185] Такое сравнение может включать в себя расчет корреляции между полной последовательностью 802 дискретных числовых значений и каждым шаблонным профилем импульса из числа шаблонных профилей 600 импульсов. В некоторых не имеющих ограничительного характера вариантах осуществления изобретения помимо расчета корреляции, процессор 404 также может сравнивать нормализованную среднюю мощность последовательности 802 дискретных числовых значений с нормализованной средней мощностью, связанной с каждым шаблонным профилем импульса из числа шаблонных профилей 600 импульсов. На основе таких сравнений лидарная система 310 определяет, что шаблонный профиль 604 импульса имеет наибольший параметр сходства, получает параметр разрешения для компенсации времени и/или параметр разрешения для компенсации расстояния и определяет, что расстояние от лидарной системы до объекта на этапе использования 310 равно 47 см. Кроме того, вид материала объекта на этапе использования определяется как пластмасса.
Компьютерные способы
[186] На фиг. 13 представлена блок-схема способа 900 определения расстояния от лидарной системы 310 до объекта 330 согласно различным не имеющим ограничительного характера вариантам осуществления настоящей технологии.
[187] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способ 900 может быть реализован элементом 320 контроллера, связанным с лидарной системой 310. Как описано выше, в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии элемент 320 контроллера может содержать один или несколько процессоров и может быть реализован подобно электронному устройству 210 и/или компьютерной системе 100 без выхода за границы настоящей технологии. Способ 900 начинается с шага 902.
[188] Шаг 902: получение электронным устройством последовательности дискретных числовых значений.
[189] На шаге 902 преобразователь 402 АЦП преобразует электрический импульс 422 в последовательность 431 дискретных числовых значений, содержащую дискретные числовые значения 432, 434 и 436. Преобразователь 402 АЦП может выдавать последовательность дискретных значений, например, значения 432, 434 и 436, в процессор 404. Таким образом, последовательность 431 дискретных числовых значений может представлять отправленный оптический импульс 412, который после взаимодействия с объектом 330 может быть отражен в направлении лидарной системы 310 как отраженный оптический импульс 414.
[190] Шаг 904: обращение электронного устройства к хранящейся в памяти заранее наполненной библиотеке для получения параметра разрешения.
[191] На шаге 904 процессор 404 обращается к заранее наполненной библиотеке 700, хранящейся в памяти 406. Как описано выше, заранее наполненная библиотека 700 может содержать шаблонные профили 600 импульсов. Кроме того, в заранее наполненной библиотеке 700 каждый шаблонный профиль импульса из числа шаблонных профилей 600 импульсов может быть связан с соответствующим тестовым объектом 508, с соответствующим параметром разрешения и с видом материала соответствующего тестового объекта 508 из множества видов материалов, таких как пластмасса, резина, метал, бетон и т.п.
[192] Обращение процессора 404 к заранее наполненной библиотеке 700 включает в себя определение параметра сходства между последовательностью 431 дискретных числовых значений и каждым шаблонным профилем импульса, связанным с шаблонными профилями 600 импульсов. Кроме того, процессор 404 получает параметр разрешения шаблонного профиля импульса из списка шаблонных профилей 600 импульсов, имеющего наибольший параметр сходства. Параметр разрешения может включать в себя значение времени и/или значение расстояния.
[193] Шаг 906: использование электронным устройством соответствующего параметра разрешения для определения расстояния от лидарной системы до объекта на этапе использования.
[194] На шаге 906 процессор 404 использует полученный параметр разрешения для определения расстояния 390 от лидарной системы 310 до объекта 330. При этом процессор 404 может скорректировать рассчитанное расстояние, соответствующее значению времени или значению расстояния, связанным с параметром разрешения.
[195] На одном или нескольких не имеющих ограничительного характера шагах, связанных со способом 900, получение параметра разрешения может быть основано на корреляционном методе и/или на методе минимальной среднеквадратичной ошибки и/или на алгоритме MLA.
[196] На одном или нескольких не имеющих ограничительного характера шагах, связанных со способом 900, процессор 404 наполняет библиотеку 700 в соответствии с тестовым объектом 508 из материала такого вида, как пластмасса, резина, металл, бетон и т.п. Тестовый объект 508 может располагаться на заранее заданном расстоянии. Процессор 404 может получать соответствующий шаблонный профиль импульса, например, профиль 602, для отраженного тестового оптического импульса 504. Кроме того, процессор 404 может определять параметр разрешения для соответствующего шаблонного профиля импульса, например, для профиля 602, на основе заранее заданного расстояния. Определив параметр разрешения, процессор 404 может пополнять библиотеку 700 записью для соответствующего шаблонного профиля импульса, например, для профиля 602. Таким образом, эта запись может указывать на соответствующий шаблонный профиль импульса, например, на профиль 602, на тип тестового объекта 508 и на параметр разрешения.
[197] Для специалистов в данной области техники должно быть очевидно, что по меньшей мере некоторые варианты осуществления настоящей технологии преследуют цель повышения разрешения в технических решениях, направленных на решение конкретной технической проблемы, а именно, повышение эффективности лидарной системы при одновременном сокращении аппаратных средств в различных лидарных системах путем внедрения и применения заранее наполненной библиотеки 700 для получения и использования параметра разрешения с целью определения расстояния между объектом 330 и лидарной системой.
[198] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
[199] Несмотря на то, что описанные выше варианты реализации приведены со ссылкой на конкретные шаги, выполняемые в определенном порядке, должно быть понятно, что эти шаги могут быть объединены, разделены или что их порядок может быть изменен без выхода за границы настоящей технологии. Соответственно, порядок и группировка шагов не носят ограничительного характера для настоящей технологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
| ЛИДАРНЫЕ (LIDAR) СПОСОБЫ И СИСТЕМЫ СО СКАНИРОВАНИЕМ С ИЗБИРАТЕЛЬНОЙ ПЛОТНОСТЬЮ НА ОСНОВЕ MEMS | 2019 |
|
RU2752016C2 |
| СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LiDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ | 2019 |
|
RU2762744C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829904C1 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |


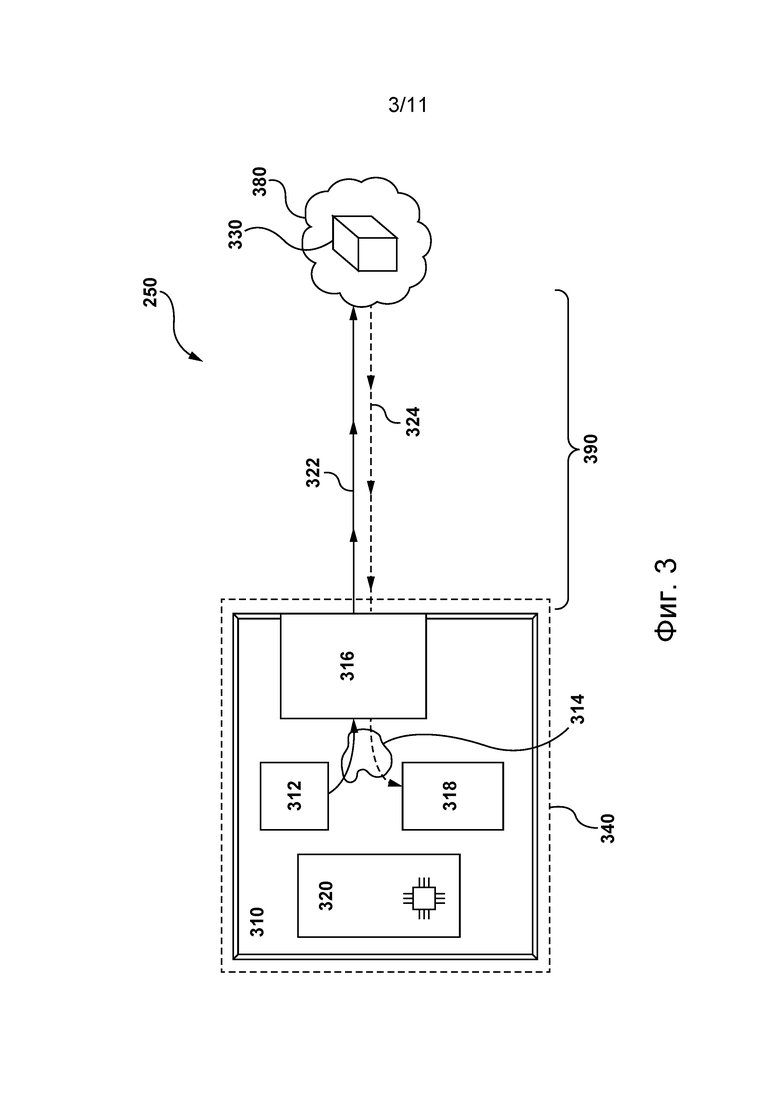


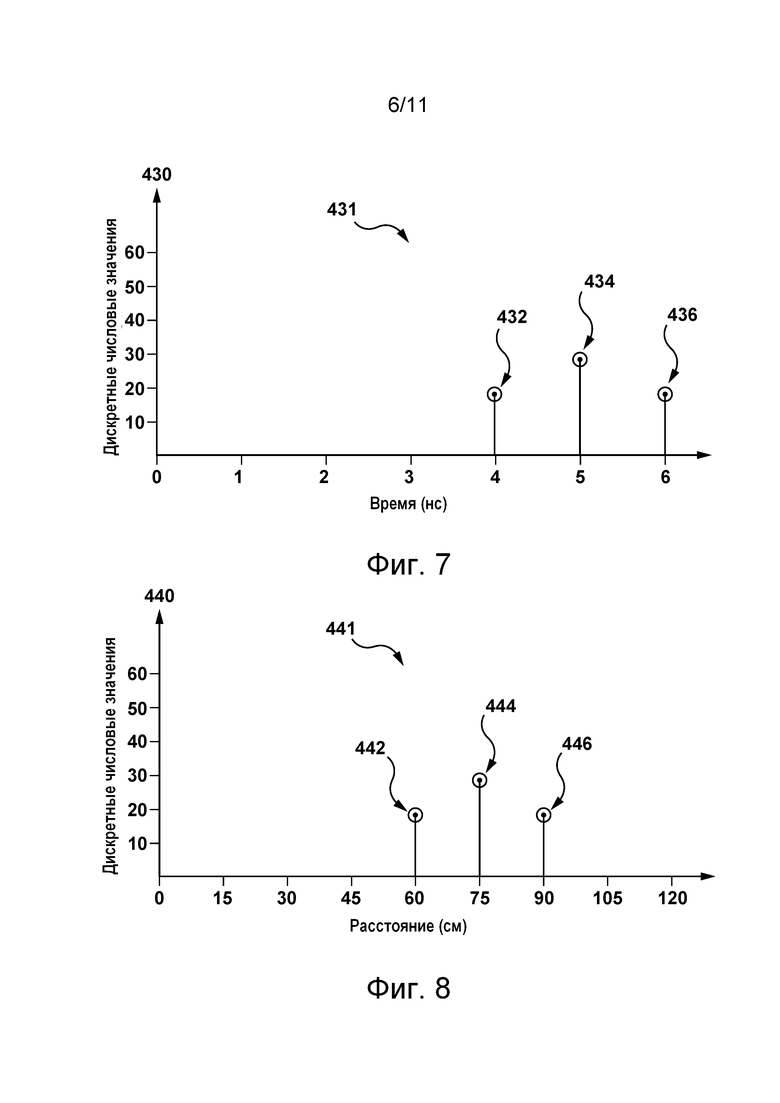



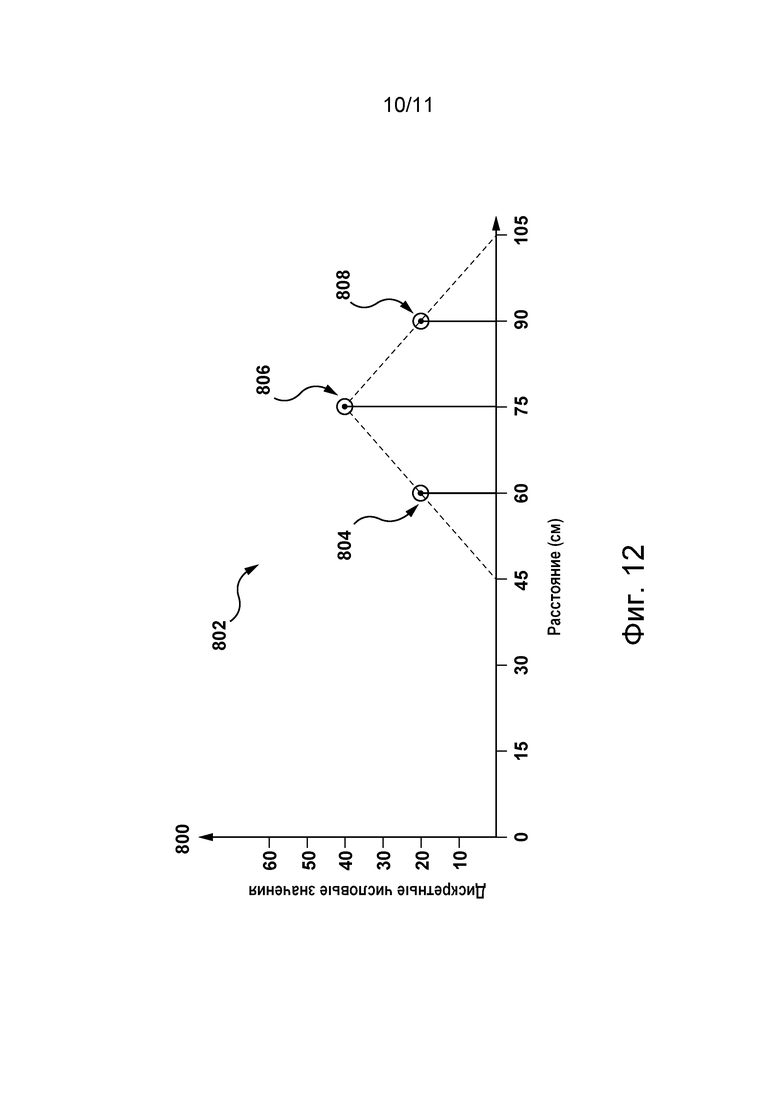
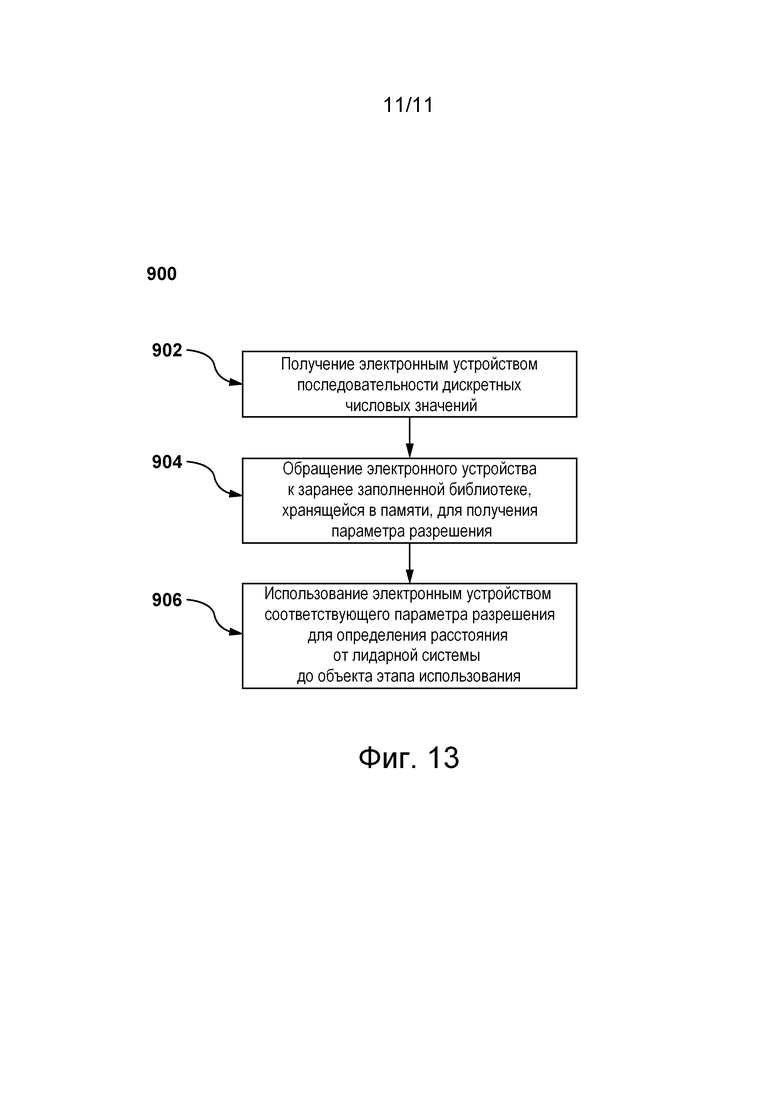
Реализованы системы и способ для определения расстояния от лидарной системы до объекта на этапе использования, включающие в себя: получение последовательности дискретных числовых значений, представляющей обратный оптический импульс; обращение для получения параметра разрешения к хранящейся в памяти заранее наполненной библиотеке, при этом обращение включает в себя определение параметров сходства последовательности дискретных значений и соответствующих профилей из списка шаблонных профилей импульсов, где параметр сходства определяется для последовательности дискретных значений и соответствующего шаблонного профиля импульса из списка шаблонных профилей импульсов, и получение из библиотеки по меньшей мере соответствующего параметра разрешения шаблонного профиля импульса, имеющего наибольший параметр сходства; и использование соответствующего параметра разрешения для определения расстояния от лидарной системы до объекта на этапе использования. Техническим результатом при реализации заявленной группы решений является повышение эффективности лидарной системы при одновременном сокращении аппаратных средств в различных лидарных системах путем внедрения и применения заранее наполненной библиотеки 700 для получения и использования параметра разрешения с целью определения расстояния между объектом 330 и лидарной системой. 2 н. и 16 з.п. ф-лы, 13 ил.
1. Компьютерный способ определения расстояния от лидарной системы, связанной с выполняющим способ электронным устройством, до объекта на этапе использования, причем вид объекта соответствует виду из множества видов объектов, при этом способ включает в себя:
- получение электронным устройством последовательности дискретных числовых значений, представляющей обратный оптический импульс, соответствующий выходному оптическому импульсу, излученному лидарной системой и вернувшемуся в лидарную систему после взаимодействия с объектом на этапе использования;
- обращение электронного устройства для получения параметра разрешения к заранее наполненной библиотеке, хранящейся в памяти и содержащей список шаблонных профилей импульсов, при этом профиль из списка шаблонных профилей импульсов связан в библиотеке с соответствующим тестовым объектом, с соответствующим параметром разрешения и с видом соответствующего тестового объекта из множества видов объектов, а обращение включает в себя:
- определение электронным устройством параметров сходства последовательности дискретных значений и соответствующих профилей из списка шаблонных профилей импульсов, где параметр сходства определяется для последовательности дискретных значений и соответствующего шаблонного профиля импульса из списка шаблонных профилей импульсов, и
- получение электронным устройством из библиотеки по меньшей мере соответствующего параметра разрешения шаблонного профиля импульса, имеющего наибольший параметр сходства; и
- использование электронным устройством соответствующего параметра разрешения для корректировки расстояния от лидарной системы до объекта на этапе использования.
2. Способ по п. 1, отличающийся тем, что определение параметра сходства включает в себя сравнение электронным устройством последовательности дискретных значений с полным шаблонным профилем импульса.
3. Способ по п. 1, отличающийся тем, что определение параметра сходства включает в себя использование электронным устройством корреляционного метода для определения параметра сходства.
4. Способ по п. 1, отличающийся тем, что определение параметра сходства включает в себя использование электронным устройством метода минимальной среднеквадратичной ошибки для определения параметра сходства.
5. Способ по п. 1, отличающийся тем, что электронное устройство связано с самоуправляемым автомобилем.
6. Способ по п. 5, отличающийся тем, что он дополнительно включает в себя управление электронным устройством работой самоуправляемого автомобиля на основе расстояния до объекта на этапе использования.
7. Способ по п. 6, отличающийся тем, что получение по меньшей мере параметра разрешения дополнительно включает в себя получение электронным устройством вида соответствующего тестового объекта для шаблонного профиля импульса, имеющего наибольший параметр сходства, при этом управление работой самоуправляемого автомобиля с использованием электронного устройства дополнительно основано на виде соответствующего тестового объекта.
8. Способ по п. 7, отличающийся тем, что вид объекта на этапе использования заранее не известен.
9. Способ по п. 1, отличающийся тем, что последовательность дискретных числовых значений формируется аналого-цифровым преобразователем с заранее заданным  разрешением.
разрешением.
10. Способ по п. 9, отличающийся тем, что заранее заданное  разрешение равно приблизительно 1 нс.
разрешение равно приблизительно 1 нс.
11. Способ по п. 1, отличающийся тем, что до получения последовательности дискретных числовых значений дополнительно включает в себя пополнение электронным устройством заранее наполненной библиотеки.
12. Способ по п. 11, отличающийся тем, что пополнение для тестового объекта некоторого вида включает в себя:
- получение электронным устройством соответствующего шаблонного профиля импульса для обратного тестового оптического импульса, соответствующего тестовому выходному оптическому импульсу, излученному лидарной системой и вернувшемуся в лидарную систему после взаимодействия с тестовым объектом, расположенным на заранее заданном расстоянии от лидарной системы;
- определение электронным устройством параметра разрешения для обратного тестового оптического импульса на основе заранее заданного расстояния;
- пополнение электронным устройством библиотеки записью для соответствующего шаблонного профиля импульса, указывающей на соответствующий шаблонный профиль импульса, вид тестового объекта и параметр разрешения.
13. Способ по п. 1, отличающийся тем, что параметр разрешения представляет собой значение времени или значение расстояния.
14. Способ по п. 13, отличающийся тем, что параметр разрешения представляет собой значение времени, представляющее собой разность между моментом времени, соответствующим фактическому пиковому значению соответствующего шаблонного профиля импульса, и моментом времени, соответствующим рассчитанному пиковому значению соответствующего шаблонного профиля импульса.
15. Способ по п. 13, отличающийся тем, что использование соответствующего параметра разрешения включает в себя использование электронным устройством значения времени для определения времени прохождения обратного оптического импульса.
16. Способ по п. 1, отличающийся тем, что он дополнительно включает в себя обучение алгоритма машинного обучения прогнозированию наибольшего параметра сходства на основе списка шаблонных профилей импульсов и связанных записей, хранящихся в библиотеке.
17. Способ по п. 1, отличающийся тем, что он дополнительно включает в себя обучение алгоритма машинного обучения прогнозированию вида тестового объекта на основе списка шаблонных профилей импульсов и связанных записей, хранящихся в библиотеке.
18. Электронное устройство для определения расстояния от лидарной системы, связанной с электронным устройством, до объекта на этапе использования, вид которого соответствует виду из множества видов объектов, выполненное с возможностью:
- получения последовательности дискретных числовых значений, представляющей обратный оптический импульс, соответствующий выходному оптическому импульсу, излученному лидарной системой и вернувшемуся в лидарную систему после взаимодействия с объектом на этапе использования;
- обращения для получения параметра разрешения к заранее наполненной библиотеке, хранящейся в памяти и содержащей список шаблонных профилей импульсов, при этом профиль из списка шаблонных профилей импульсов связан в библиотеке с соответствующим тестовым объектом, с соответствующим параметром разрешения и с видом соответствующего тестового объекта из множества видов объектов, а обращение включает в себя:
- определение параметров сходства последовательности дискретных значений и соответствующих профилей из списка шаблонных профилей импульсов, где параметр сходства определяется для последовательности дискретных значений и соответствующего шаблонного профиля импульса из списка шаблонных профилей импульсов, и
- получение из библиотеки по меньшей мере соответствующего параметра разрешения шаблонного профиля импульса, имеющего наибольший параметр сходства; и
- использования соответствующего параметра разрешения для корректировки расстояния от лидарной системы до объекта на этапе использования.
| US 10059342 B2, 28.08.2018; US 2018113160 A1, 26.04.2018 | |||
| WO 2019199475 A2, 17.10.2019 | |||
| US 2017068247 A1, 09.03.2017. |
