Изобретение относится к области автоматизированных систем управления технологическими процессами и может быть использовано при выполнении проверки защит (далее - ПЗ) систем автоматического управления (далее - САУ) газоперекачивающего агрегата (далее - ГПА), реализованных на базе микропроцессорных систем контроля и управления.
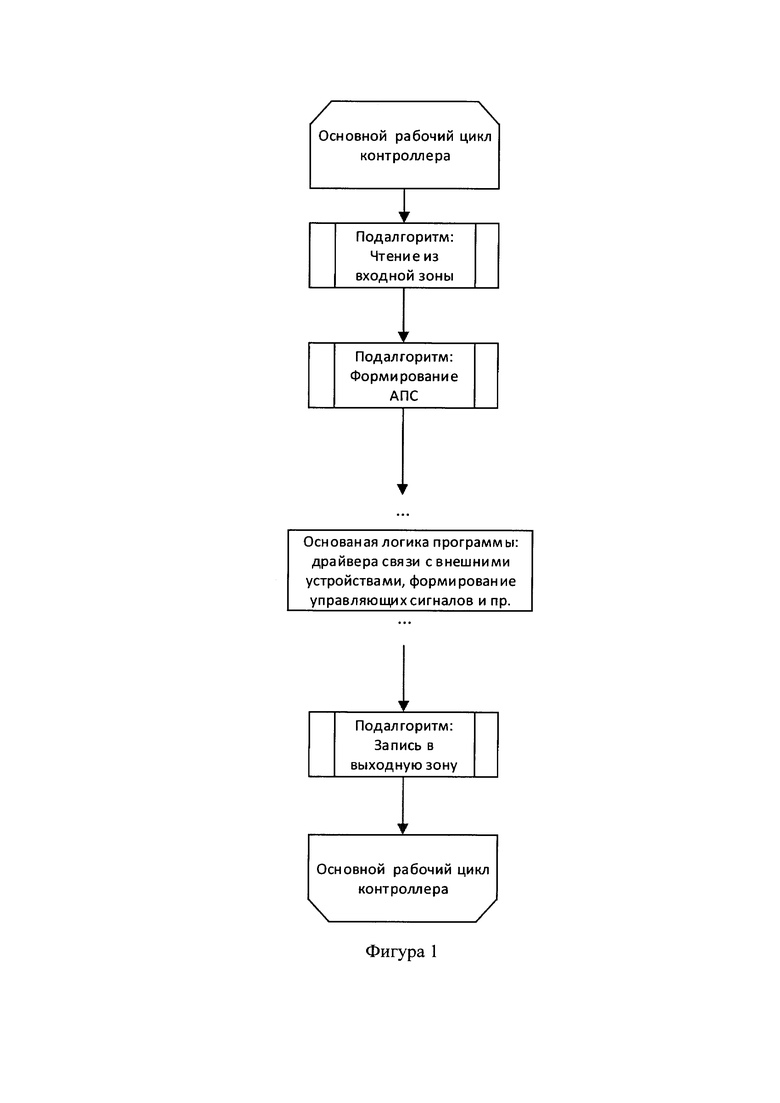
Типовая блок схема основного рабочего цикла контроллера САУ ГПА представлена на фиг.1. В начале цикла происходит чтение сигналов из входной зоны устройства, формирование предупредительной и аварийной сигнализации на основании полученного состояния входов, происходит выполнение основной логики программы, такой как: обеспечение связи с внешними устройствами, формирование управляющих сигналов, определение режимов и прочее, после чего производится запись сигналов в выходную зону устройства - запись состояния выходов. В случае формирования аварийной сигнализации, срабатывает защита САУ ГПА, обеспечивающая реакцию САУ на возмущающее воздействие, результатом которой является аварийный останов газоперекачивающего агрегата.
На данный момент в существующих алгоритмах систем автоматизированного управления ГПА проверка защит [1] производится силами обслуживающего персонала. Известны способы [2], при которых ПЗ проводится: либо с помощью вспомогательного оборудования [3, 4], подключенного к САУ через клеммные колодки, производится подача аналоговых и дискретных сигналов требуемого уровня на вход контроллера, либо производится имитация уровня аналоговых сигналов и сработки дискретных сигналов путем ввода «вручную» данных в специализированное программное обеспечение (далее - ПО).
Недостатками данных способов являются:
- высокая длительность процесса проверки защит вследствие того, что часть технологических этапов приходится выполнять с применением ручного труда;
- высокая вероятность совершения ошибок персоналом из-за отсутствия четкой последовательности выполняемых этапов;
- требуется точное знание логики срабатывания защиты и уровня срабатывания защиты каждого аналогового сигнала;
- снижение ресурса оборудования, кабелей и проводов САУ по причине частых подключений внешнего оборудования к клеммным колодкам с временным отключением датчикового оборудования от входов устройства.
Задачей изобретения является оптимизация процесса проверки защит системы автоматизированного управления газоперекачивающим агрегатом.
Технический результат - автоматизация процесса проверки защит САУ ГПА.
Поставленная задача решается, а технический результат достигается путем разработки алгоритма, реализующего программную имитацию сигналов необходимых для срабатывания защиты, в случае получения команды на проверку защиты от эксплуатационного персонала.
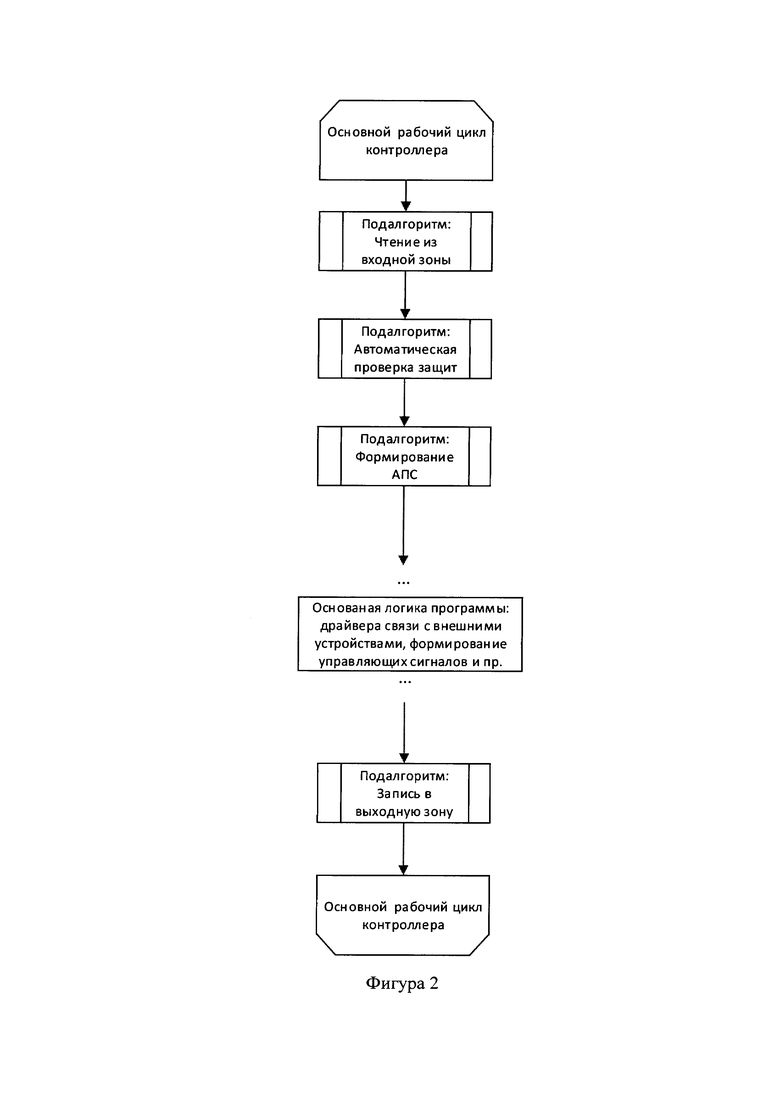
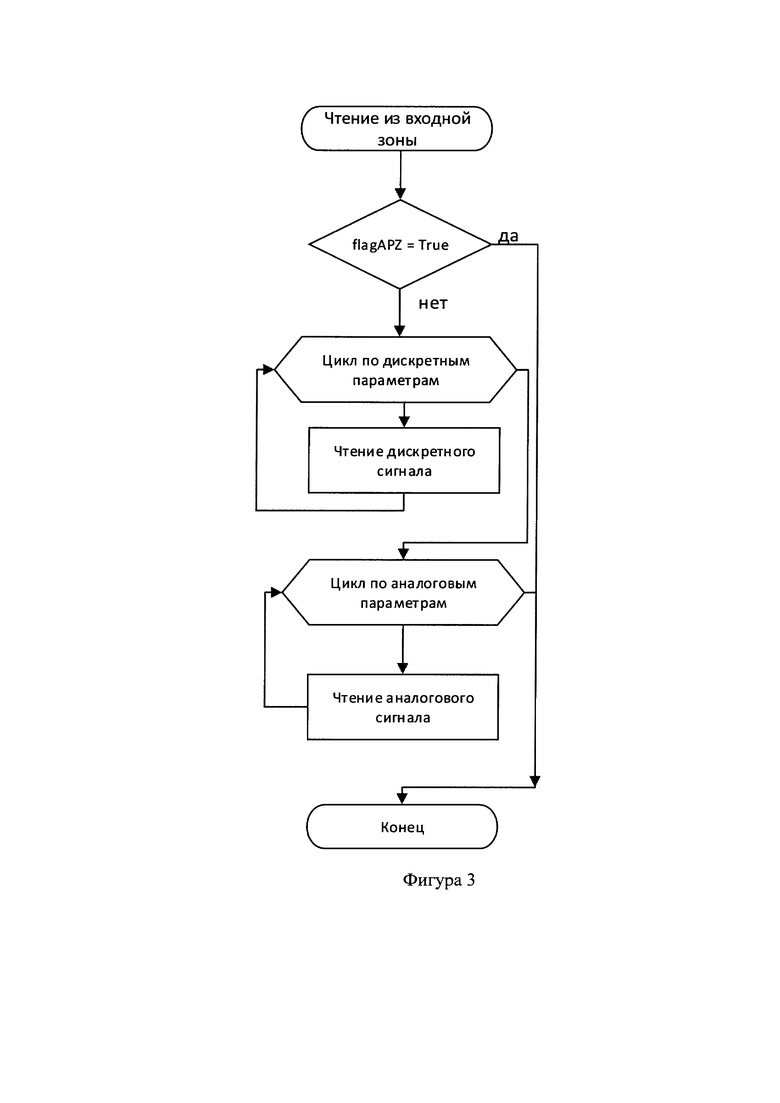
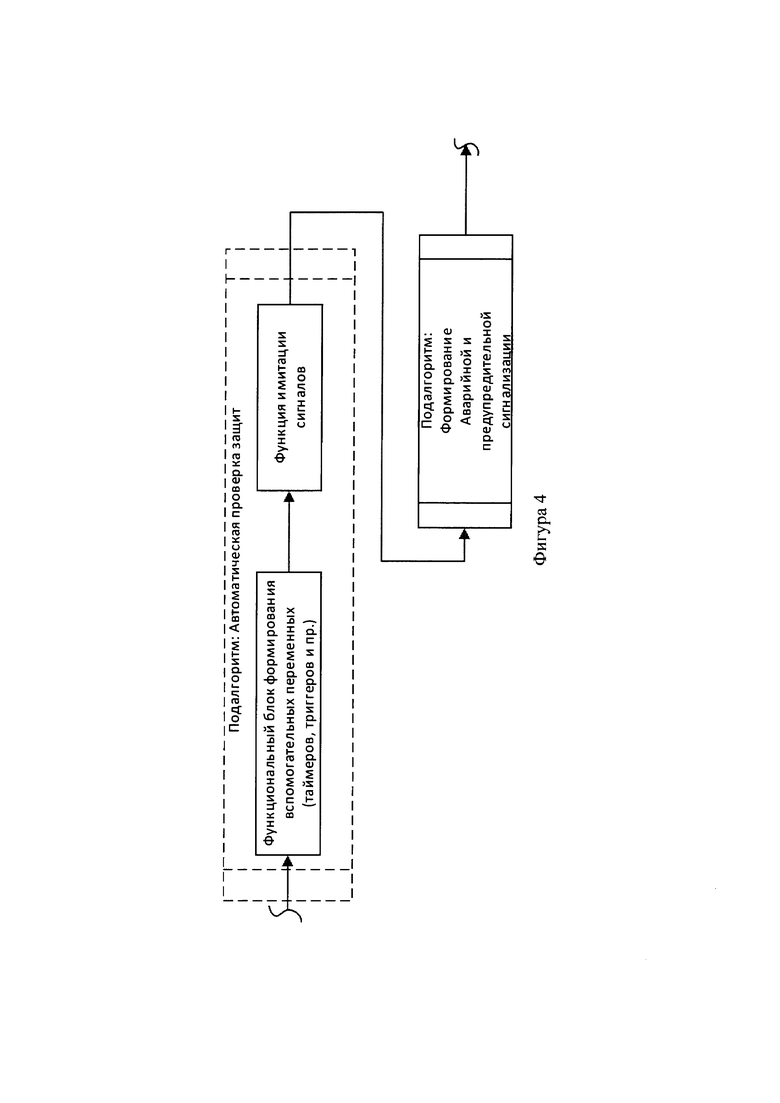
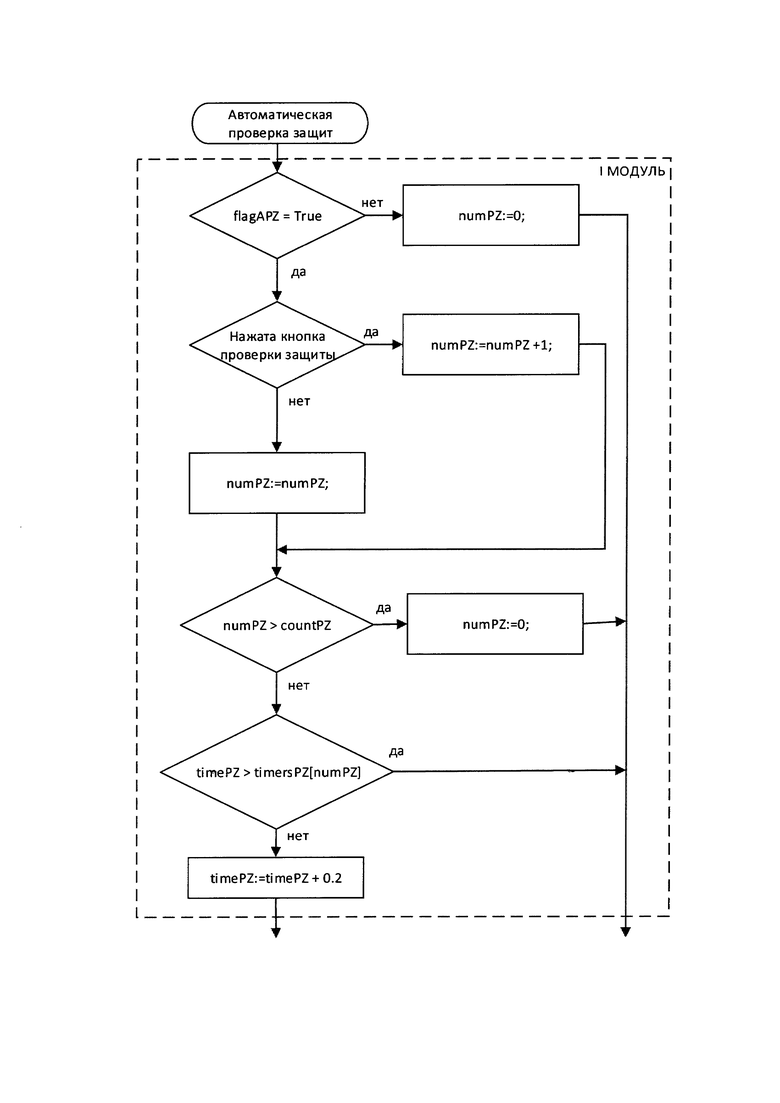
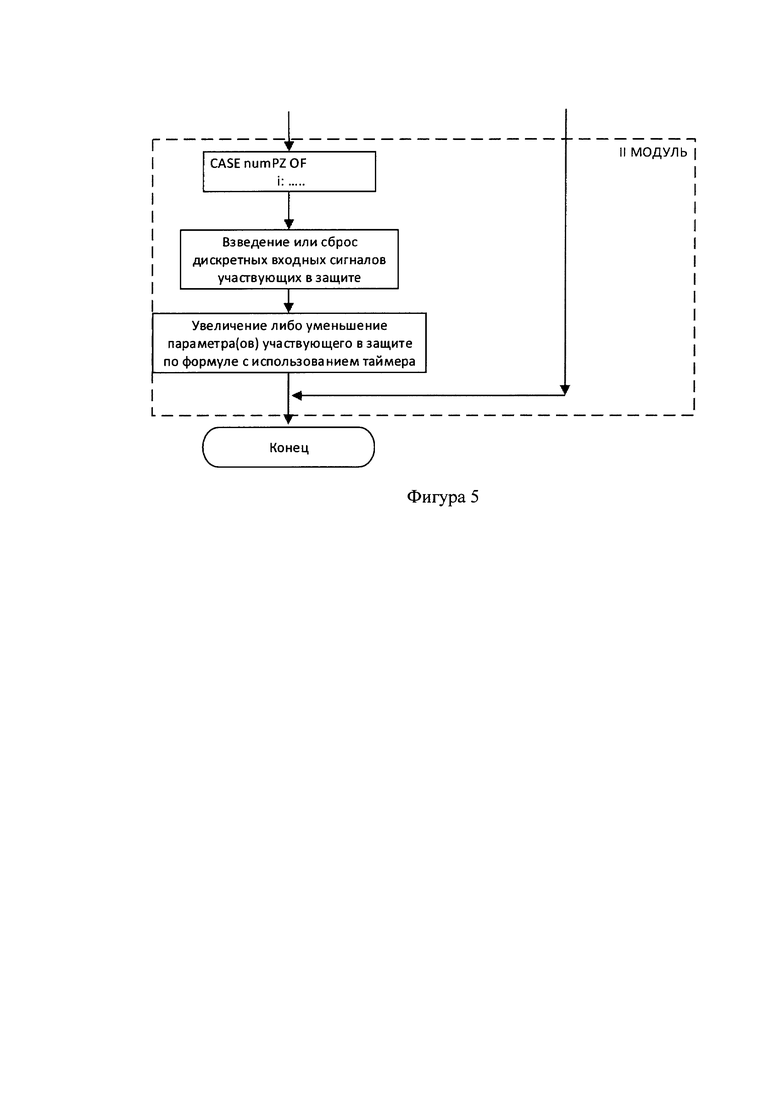
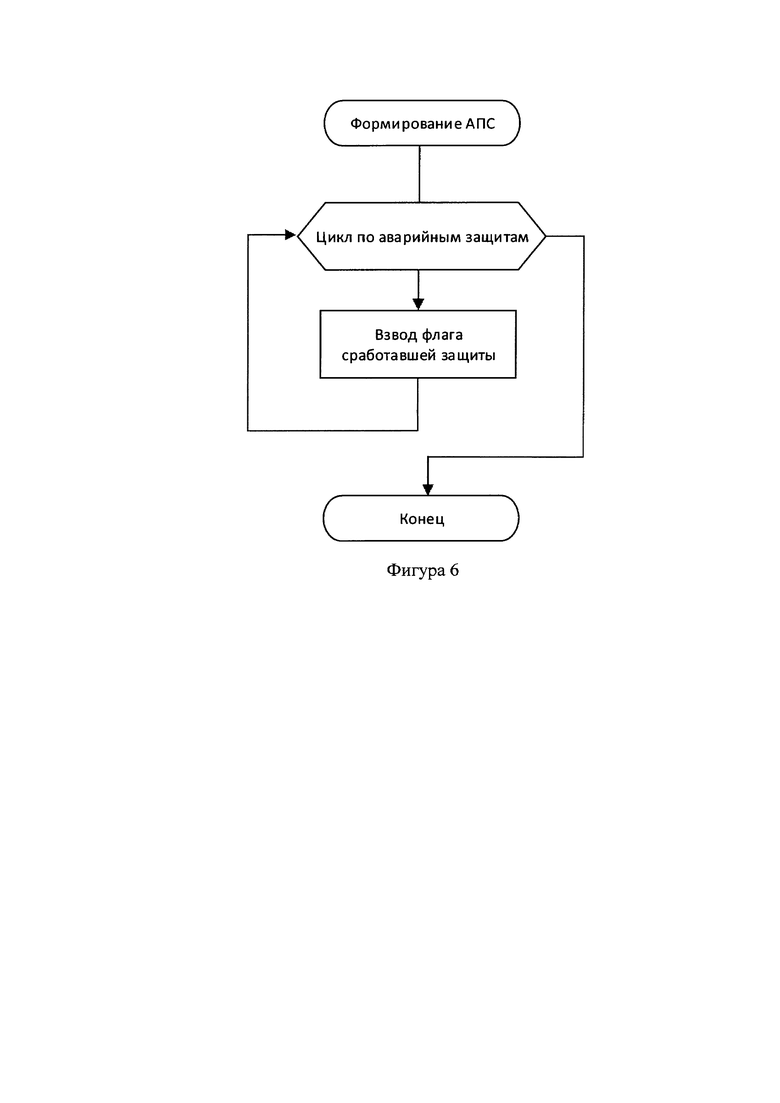
На фигуре 2 представлена блок-схема основного цикла программы с добавленным подалгоритмом «Автоматическая проверка защит». На фигуре 3 представлен подалгоритм «Чтение из входной зоны». На фигуре 4 представлена схема взаимодействия основных программных модулей подалгоритмов «Формирование аварийной и предупредительной сигнализации» (далее АПС) и «Автоматическая проверка защит». На фигуре 5 представлен подалгоритм «Автоматическая проверка защит». На фигуре 6 представлен подалгоритм «Формирование АПС». На фигуре 7 представлен конфигуратор файлов подалгоритмов «Формирование АПС» и «Автоматическая проверка защит».
Способ проверки защит выполнен в виде линейного алгоритма, который состоит из последовательно выполняемых этапов, включающих четкую очередность определенных команд. В САУ содержащих контроллер, модули входных и выходных сигналов внедряют данный алгоритм (фиг.2), между этапом чтения сигналов из входной зоны устройства и этапом формирования предупредительной и аварийной сигнализации на основании полученного состояния входов. Для обеспечения функционирования алгоритма, вносят дополнительные изменения в существующий подалгоритм «Чтение из входной зоны» (фиг.3).
В алгоритм введены переменные: flag_APZ - флаг режима проверки защит, btn_APZ - переменная фиксирующая нажатие кнопки АПЗ, по нажатию на которою происходит переход САУ на режим проверки защит, numPZ - переменная определяющая номер текущей проверяемой защиты, countPZ - количество всех проверяемых защит, timePZ - текущее время проверки защиты, timersPZ[] - массив размерность равный countPZ, содержащий времена проверки каждой защиты.
Рабочий основной цикл контроллера (фиг.2) САУ ГПА выполняется постоянно, режимы работы САУ определяются оператором посредством нажатия на программные, либо физические кнопки. В случае перехода САУ на режим проверки защит происходит запоминание данного режима в переменную flag_APZ, при этом на этапе чтения сигналов из входной зоны устройства в случае состояния переменной равного True (означающем, что САУ находится в режиме ПЗ), отключается опрос контроллером состояний входной зоны устройства (фиг.3), что позволяет вносить изменения в привязанные к входам переменные.
В подалгоритме «Автоматическая проверка защит» производится запись имитируемых программой значений в привязанные переменные контроллера. Подалгоритм состоит из двух (фиг.4) выполняемых последовательно программных модулей: функционального блока формирования вспомогательных переменных и функции имитации сигналов. При переходе в цикле контроллера к подалгоритму «Автоматическая проверка защит» (фиг.5) в первом модуле начинает выполняться вспомогательная логика подалгоритма, которая стартует с проверки текущего режима САУ: в случае если режим - ПЗ, передается управление оперативному персоналу, который нажатием на кнопку АПЗ производит последовательное переключение номера проверяемой защиты (увеличивает значение переменной numPZ). При превышении номера защиты общего количества защит, производится преждевременный выход из подалгоритма с обнулением переменной numPZ. На следующем этапе выполнения первого модуля происходит сравнение времени выполнения проверки защиты (переменная timePZ) и если время проверки защиты превышает установленное для данной защиты (timePZ>timersPZ[numPZ]), производится выход из подалгоритма «Автоматическая проверка защит», если не превышает то переменная timePZ увеличивается на значение равное времени однократного выполнения основного рабочего цикла. Контроллер САУ имея текущий номер проверяемой защиты во втором модуле выбирает по номеру проверяемой защиты логику симуляции, в соответствии с которой взводит или сбрасывает дискретные входные сигналы, увеличивает или уменьшает аналоговые параметры по предлагаемым формулам: - Увеличение (в символьном представлении):

, где:
Anpar.Tg_inD - измеряемый параметр;
Anpar.Pg_outN_hilimit - верхняя граница диапазона измеряемого параметра;
Anpar.Pg_outN_lolimit - нижняя граница диапазона измеряемого параметра;
timersPZ[numPZ] - элемент массива содержащий время проверки защиты измеряемого параметра;
numPZ - номер проверяемой защиты;
timePZ - текущее время (таймер) проверяемой защиты.
- Уменьшение (в символьном представлении):

, где:
Anpar.Tg_inD - измеряемый параметр;
Anpar.Tg_inD_hilimit - верхняя граница диапазона измеряемого параметра;
Anpar.Tg_inD_lolimit - нижняя граница диапазона измеряемого параметра;
timersPZ[numPZ] - элемент массива содержащий время проверки защиты измеряемого параметра;
numPZ - номер проверяемой защиты;
timePZ - текущее время (таймер) проверяемой защиты.
Этап формирования аварийной и предупредительной сигнализацией в программном обеспечении САУ представлен подалгоритмом «Формирование АПС» (фиг.6). На данном этапе в соответствии с условиями срабатывания защит формируются аварийная сигнализация используемая в дальнейшем для выполнения логики описывающей реакцию САУ. При этом в условиях используются блокированные привязанные к выходам контроллера переменные, программно измененные до значений срабатывания защит.
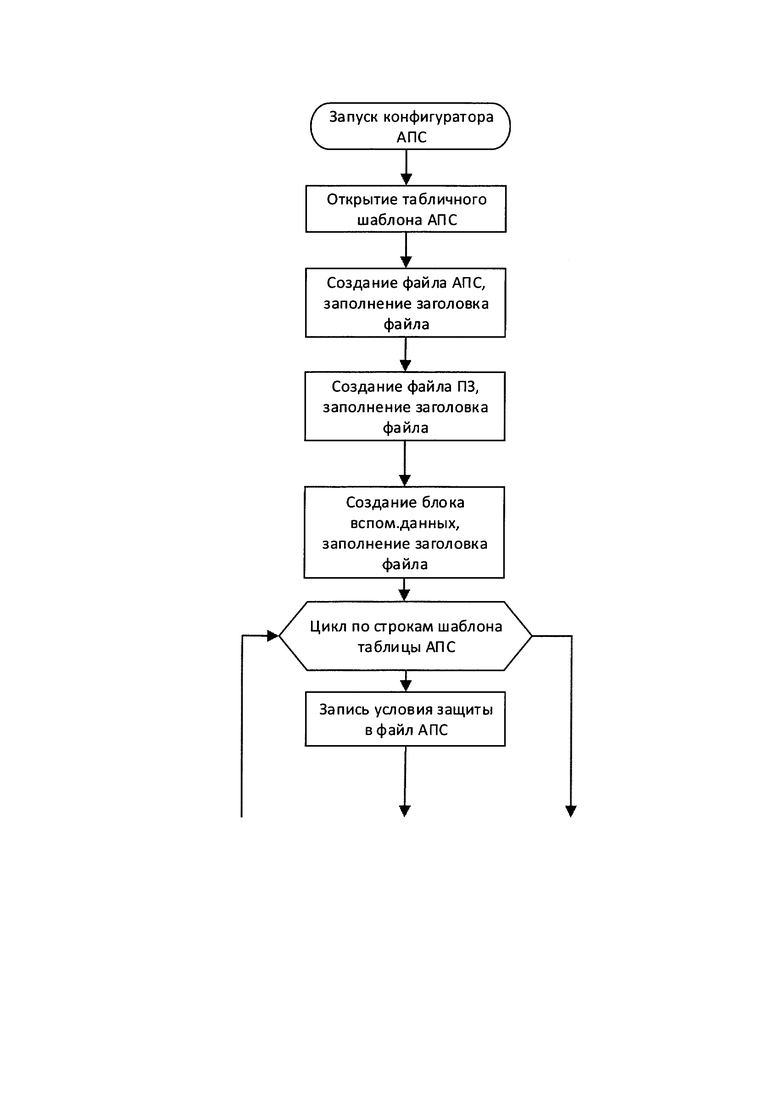
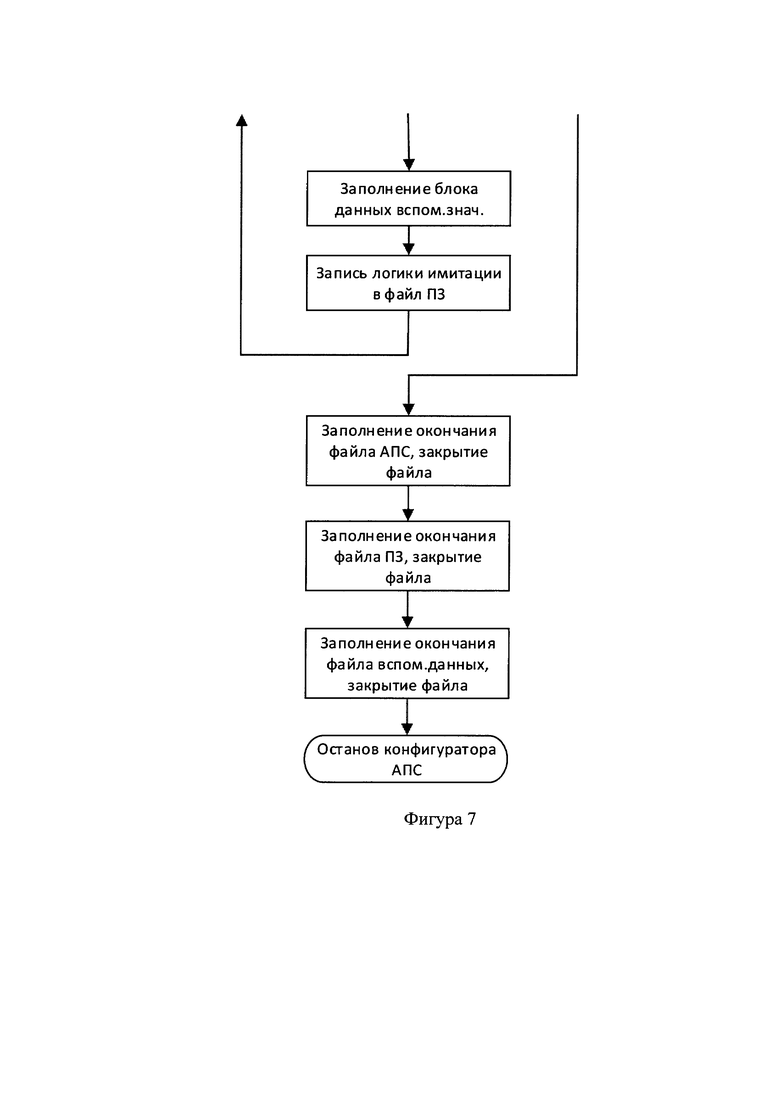
Для снижения вероятности возникновения ошибок при кодировании логики подалгоритмов «Автоматическая проверка защит» и «Формирование АПС» используется конфигуратор (фиг.7), который формирует программные код модулей подалгоритмов, используя табличное представление условия срабатывания защиты:
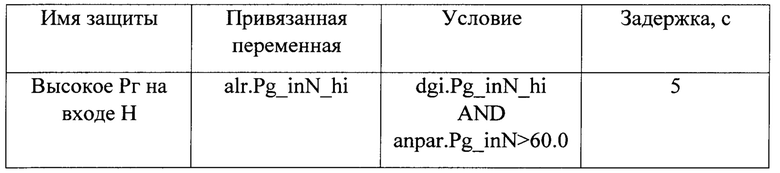
Так для подалгоритма «Формирование АПС» сформируется программный код:

Для подалгоритма «Автоматическая проверка защит» сформируется программный код:

При этом происходит программное связывание условий с логикой симуляции сигналов. Сформированный программный код добавляется в общую исполняемую программу контроллера непосредственно перед этапом компиляции.
Список литературы:
1. Козаченко А.Н. Эксплуатация компрессорных станций магистральных газопроводов / Козаченко А.Н. - М.: Нефть и газ, 1999. - 463 с. ISBN 5-7246-0055-2.
2. Методические указания по эксплуатации технологических защит, выполненных на базе микропроцессорной техники. РД 153-34.1-35.142-00 - Утв. департаментом стратегии развития и научно-технической политики РАО "ЕЭС России" 13.06.2000 г.
3. Пат. 1566302 СССР, МПК G01R 27/00. Магазин сопротивления / Булыга С.Г., Микийчук Н.Н., Пацарнюк Я.В., Шморгун Е.И.: заявитель и патентообладатель Львовский политехнический институт им. Ленинского комсомола. - №4331657/24-09; заявл. 20.11.1987; опубл. 23.05.1990, Бюл. №23. - 3 с: ил.
4. Пат. 2345377 РФ, МПК G01R 35/00. Автоматический калибратор мер измерительно-вычислительного комплекса / Бодров В.Е., Краячич А.В., Галактионова А.А., Подборонов Б.П., Свирский Ю.А: заявитель и патентообладатель Федеральное государственное унитарное предприятие "Центральный аэродинамический институт имени профессора Н.Е. Жуковского" (ФГУП "ЦАГИ"). №2007129375/28; заявл. 31.07.2007; опубл. 27.01.2009, Бюл. №23. - 3 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АГРЕГАТОМ | 2001 |
|
RU2213889C2 |
| СПОСОБ ЗАПОЛНЕНИЯ КОНТУРА АГРЕГАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ ГАЗА | 2020 |
|
RU2753097C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С ТРЕХКАСКАДНЫМ ГАЗОГЕНЕРАТОРОМ ОТ ПОМПАЖА С ПОСЛЕДУЮЩИМ РАЗРУШЕНИЕМ ГАЗОВОЗДУШНОГО ТРАКТА | 2020 |
|
RU2747113C1 |
| СИСТЕМА ВИБРАЦИОННОГО КОНТРОЛЯ, ЗАЩИТЫ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 2011 |
|
RU2464486C1 |
| УСТРОЙСТВО БЫСТРОДЕЙСТВУЮЩЕЙ СЕЛЕКТИВНОЙ ЗАЩИТЫ ОТ ОДНОФАЗНЫХ ЗАМЫКАНИЙ НА ЗЕМЛЮ В РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЯХ С ВОЗМОЖНОСТЬЮ БЕЗАВАРИЙНОГО ВВОДА РЕЗЕРВА | 2009 |
|
RU2410812C2 |
| КОМПЛЕКС ЭЛЕКТРООБОРУДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНЫХ РЕАКТОРОВ | 2014 |
|
RU2574289C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ АГРЕГАТАМИ | 2020 |
|
RU2747243C1 |
| СПОСОБ ПРОВЕДЕНИЯ ЭЛЕКТРИЧЕСКИХ ИСПЫТАНИЙ МИКРОПРОЦЕССОРНОГО УСТРОЙСТВА РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ | 2024 |
|
RU2838834C1 |
| СИСТЕМА АВАРИЙНОЙ ЗАЩИТЫ РЕАКТОРНОЙ УСТАНОВКИ | 2024 |
|
RU2831414C1 |
Изобретение относится к области автоматизированных систем управления технологическими процессами и используется при выполнении проверки защит (ПЗ) систем автоматического управления (САУ) газоперекачивающего агрегата (ГПА). Технический результат - автоматизация процесса проверки защит САУ ГПА. Сущность: в САУ, содержащую контроллер, модули входных и выходных сигналов, внедряют с использованием конфигуратора, связывающего логику формирования защиты с логикой симуляции, алгоритм проверки защит, заключающийся в том, что в случае получения команды на проверку защиты отключается чтение сигналов из входной зоны. При этом контроллер САУ выбирает по номеру проверяемой защиты логику симуляции, в соответствии с которой взводит или сбрасывает дискретные входные сигналы, увеличивает или уменьшает аналоговые параметры до значений срабатывания защит. 7 ил.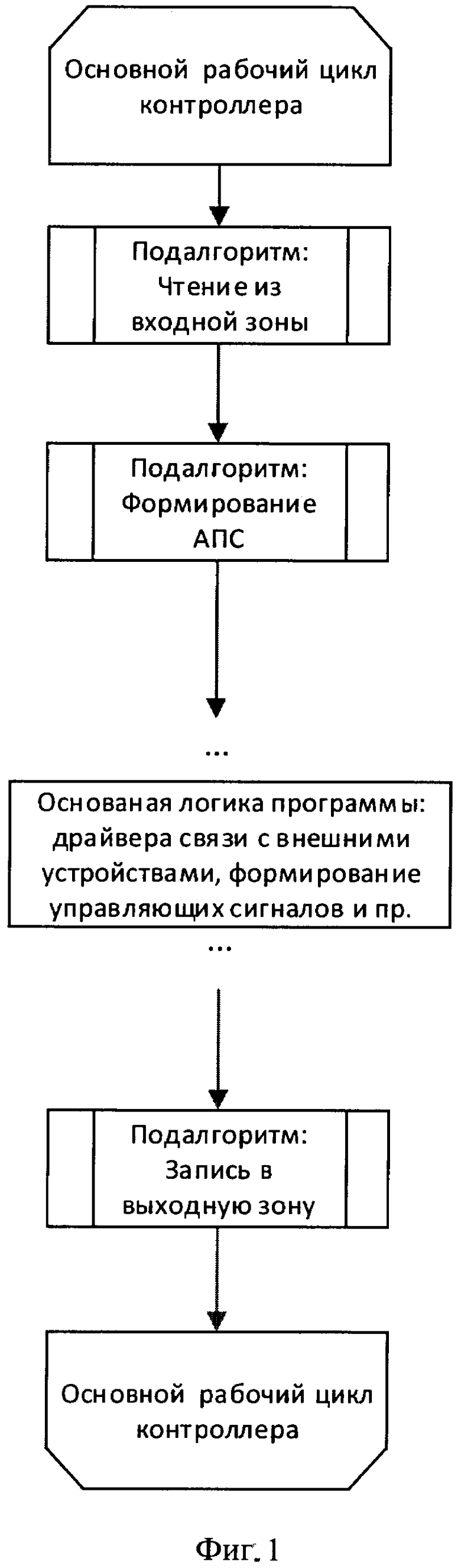
Способ проверки защиты системы автоматизированного управления газоперекачивающего агрегата (ГПА), характеризующийся тем, что в систему автоматического управления (САУ), содержащую контроллер, модули входных и выходных сигналов, внедряют с использованием конфигуратора, связывающего логику формирования защиты с логикой симуляции, алгоритм проверки защит, заключающийся в том, что в случае получения команды на проверку защиты отключается чтение сигналов из входной зоны, а контроллер САУ выбирает по номеру проверяемой защиты логику симуляции, в соответствии с которой взводит или сбрасывает дискретные входные сигналы, увеличивает или уменьшает аналоговые параметры до значений срабатывания защит.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АГРЕГАТОМ | 2001 |
|
RU2213889C2 |
| Аппарат для восстановления четыреххлористого титана жидким восстановителем | 1957 |
|
SU109880A1 |
| US 8977518 B2, 10.03.2015 | |||
| Приспособление к центрифугам для изменения наклона скребков | 1931 |
|
SU26971A1 |
