Изобретение относится к области автоматизированных систем управления технологическими процессами и используется при выполнении технологической операции заполнения полости агрегата воздушного охлаждения газа (далее - АВОГ) в технологической обвязке газоперекачивающего агрегата (далее - ГПА) с индивидуальным расположением АВОГ при наличии крана между полостью АВОГ и полостью нагнетателя.
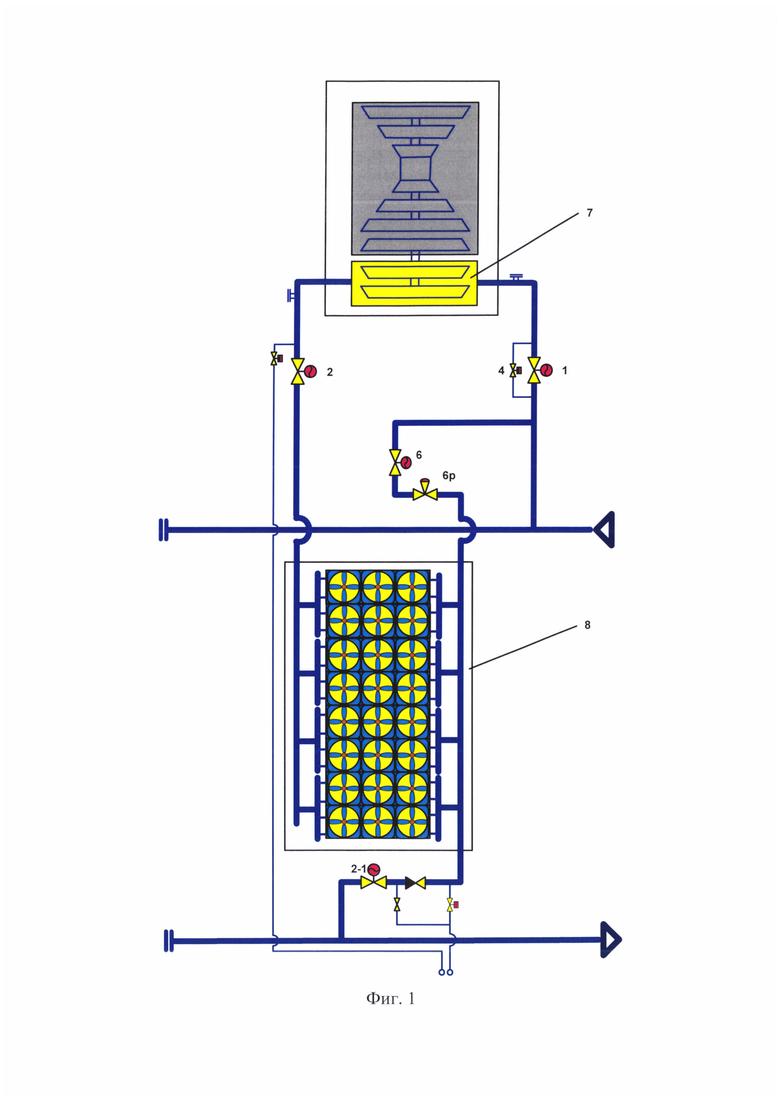
Типовая технологическая схема контура ГПА с индивидуальным АВОГ представлена на фиг. 1. Из входного коллектора цеха через входной кран (1) газ попадает в нагнетатель (7), откуда, после компримирования, горячий сжатый газ через выходной кран (2) попадает в АВО газа (8), после которого он через кран 2-1 может подаваться в выходной коллектор цеха, или, через антипомпажный клапан (6р) и рециркуляционный кран (6) перед входным краном (1) снова на вход ГПА, где 1, 2, 2-1, 6, 6р - типовая нумерация согласно СТО 2-3.5-454-2010, Приложение Д. Входной кран нагнетателя ГПА (1) имеет байпасный кран (4), использующийся для заполнения нагнетателя, где 4 - типовая нумерация согласно СТО 2-3.5-454-2010, Приложение Д. На данный момент в существующих алгоритмах систем автоматизированного управления ГПА заполнение контура АВОГ производится вручную силами оперативного персонала [1].
Недостатками данного способа являются:
- высокая длительность процесса заполнения вследствие того, что часть технологических этапов приходится выполнять с применением ручного труда;
- высокая вероятность совершения ошибок персоналом из-за отсутствия чёткой последовательности выполняемых этапов.
Задачей изобретения является оптимизация процесса заполнения контура АВОГ.
Технический результат изобретения - автоматизация технологического процесса заполнения АВОГ с целью ускорения процесса заполнения полости АВОГ и исключения ошибок персонала в процессе заполнения АВОГ.
Поставленная задача решается, а технический результат достигается тем, что в системах автоматического управления (далее - САУ), содержащих контроллер, модули входных сигналов (сигналов с датчиков), модули выходных сигналов (сигналы управления исполнительными механизмами), внедряют линейный алгоритм, включающий подалгоритмы, реализующие функции процесса заполнения, стабилизации и стравливания газа, позволяющий производить заполнение полости агрегата воздушного охлаждения газа через байпасный кран входного крана нагнетателя ГПА.
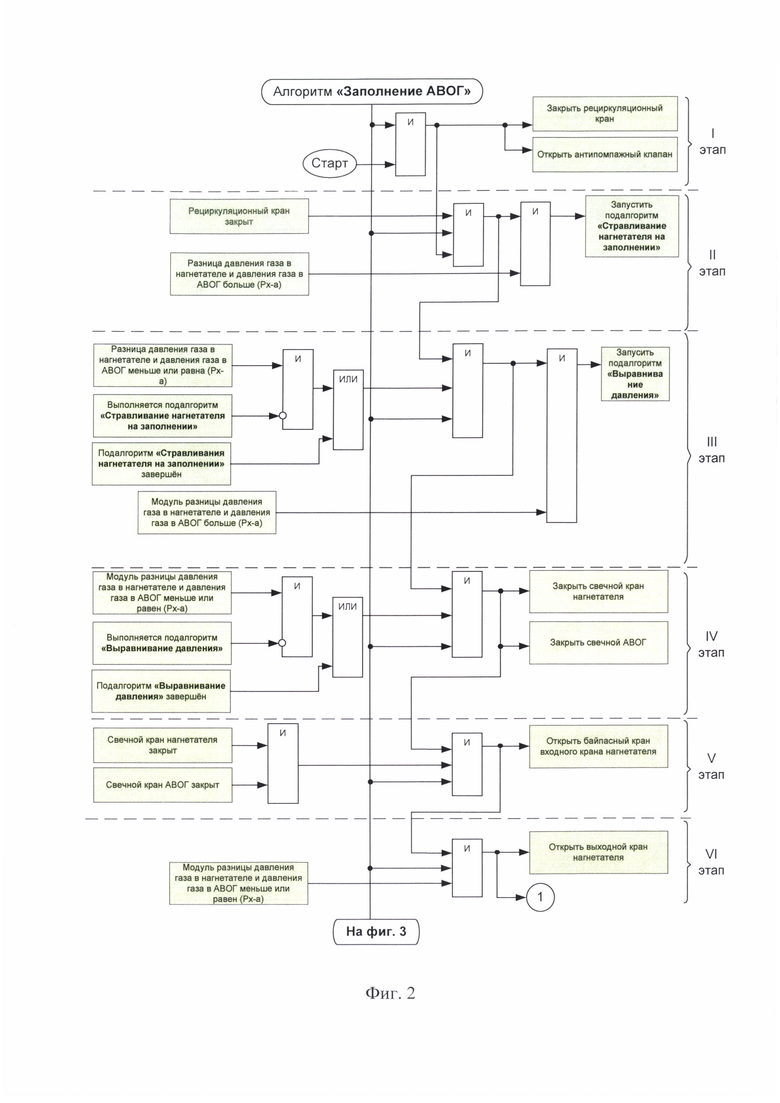
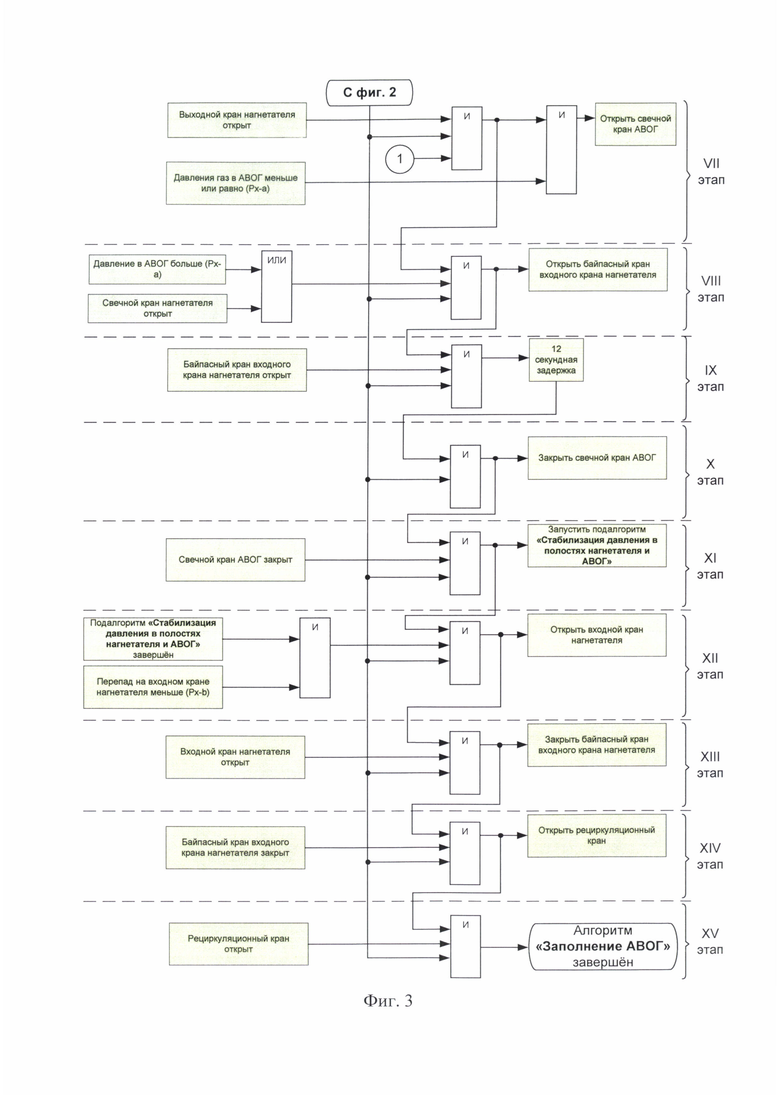
На фигурах 2 и 3 представлена блок-схема алгоритма «Заполнение АВОГ». На фигуре 4 представлен подалгоритм «Стравливание нагнетателя на заполнении». На фигуре 5 представлен подалгоритм «Выравнивание давления». На фигуре 6 представлен подалгоритм «Стравливание АВОГ на заполнении». На фигуре 7 представлен подалгоритм «Стабилизация давления в полостях нагнетателя и АВОГ».
Способ заполнения АВОГ выполнен в виде линейного алгоритма с подалгоритмами, который состоит из последовательно выполняемых этапов, включающих четкую очередность определенных команд. В САУ, содержащей контроллер, модули входных и выходных сигналов внедряют данный алгоритм в процессе выполнения которого учитываются и обрабатываются следующие возможные комбинации отношений давлений в полостях нагнетателя и АВОГ:
- имеется газ в нагнетателе, но давление газа меньше чем давление в полости АВОГ;
- имеется газ в АВОГ, но давление газа меньше чем давление в полости нагнетателе;
- отсутствует газ в нагнетателе, газ в АВОГ имеется;
- отсутствует газ в АВОГ, газ в нагнетателе имеется;
- отсутствует газ в АВОГ, отсутствует газ в нагнетателе;
- газ в нагнетателе и АВОГ имеется, давления в полостях равны.
В алгоритм введены переменные: Px - параметр (несколько меньший по значению) зависящий от перепада давления при котором возможна перестановка основной трубопроводной арматуры, a, b, c, d - переменные компенсирующие потери давления через уплотнения, n1 и n2 - переменные, определяющие время (в секундах) продувки полости нагнетателя, объединённой полости АВОГ и нагнетателя, m - переменная определяющее время (в секундах) стабилизации давления в объединённой полости АВОГ и нагнетателя. При этом a <b , b <d , d < c. Например, если перепад давления при котором разрешено открытие ТПА установлен равным 0,2 МПа [2], то значения переменных для алгоритма будут: Px = 0.15 МПа, a = 0.03 МПа, b = 0.05 МПа, c = 0.08 МПа, d = 0.07 МПа.
После запуска алгоритма «Заполнение АВОГ», на первом этапе, производится подготовка трубопроводной арматуры путём перестановки в исходное состояние. На втором этапе, при необходимости, обусловленной более высоким давлением газа в нагнетателе относительно давления в полости АВОГ (больше Px-a), производится запуск подалгоритма «Стравливание нагнетателя на заполнении». На третьем этапе, при необходимости, обусловленной модулем разницы давления в полости АВОГ и в нагнетателе большим определённого значения (Px-a), запускается подалгоритм «Выравнивание давления», либо производится переход на следующий этап. На четвёртом этапе производится закрытие свечных кранов полости нагнетателя и полости АВОГ. На пятом этапе алгоритма открывается байпасный кран входного крана нагнетателя ГПА. На шестом, при выполнении условия, что модуль разницы давления газа в нагнетателе и давления газа в АВОГ меньше или равен установленному значению (Px-a), производится открытие входного крана нагнетателя. На седьмом этапе, при выполнении условия, что давление в полости АВОГ меньше или равно установленному (Px-a), производиться открытие свечного крана АВОГ. На восьмом этапе и девятом этапе, производится открытие байпасного крана входного крана нагнетателя на n2 секунд. При этом, если на данный момент открыт свечной кран, производится продувка нагнетателя и полости АВОГ. На десятом и одиннадцатом этапах производится закрытие свечного крана, и запускается подалгоритм «Стабилизация давления в полостях нагнетателя и АВОГ». На двенадцатом этапе, при завершении подалгоритма «Стабилизация давления в полостях нагнетателя и АВОГ» и допустимом перепаде на входном кране (Px-b), производится открытие входного крана нагнетателя. На тринадцатом этапе производится закрытие байпасного крана входного крана нагнетателя. На четырнадцатом и пятнадцатом этапах производится открытие рециркуляционного крана и завершение работы алгоритма заполнения АВОГ.
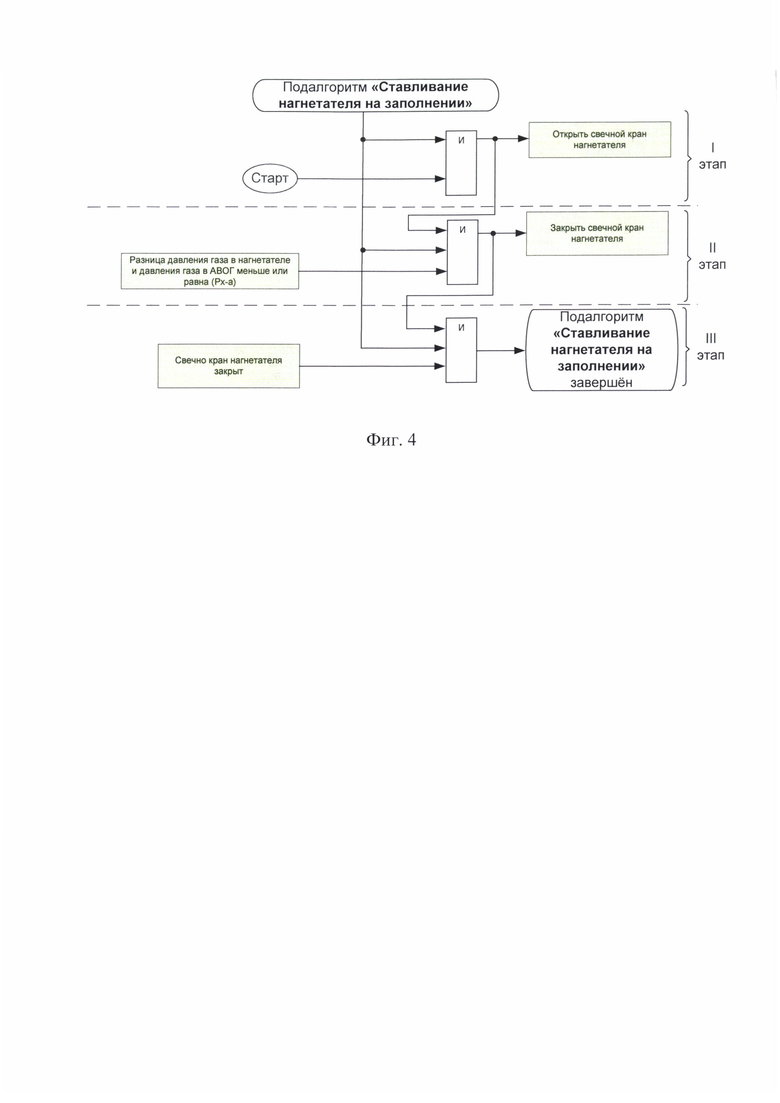
Подалгоритм «Стравливание нагнетателя на заполнении» (фиг. 4) состоит из трёх основных этапов. При выполнении подалгоритма производится открытие свечного крана нагнетателя (этап 1), который закрывается при достижении разницы давления в нагнетателе и давления газа в АВОГ определённого в подалгоритме значения (Px-a) (этапы 2-3).
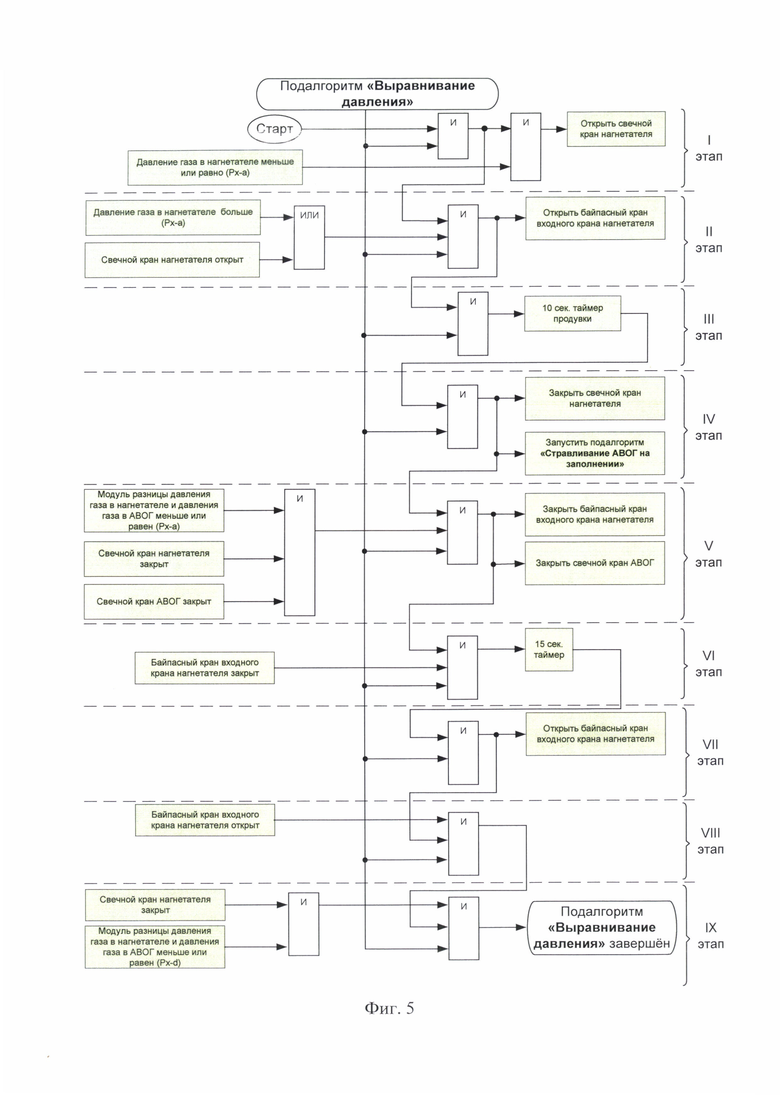
Подалгоритм «Выравнивание давления» (фиг. 5) состоит из девяти основных этапов. При выполнении подалгоритма на первом этапе, при необходимости, обусловленной давлением в нагнетателе меньше или равным установленного (Px-a), производится открытие свечного крана нагнетателя, либо переход на следующий этап. На втором и третьем этапах, производится открытие байпасного крана входного крана нагнетателя, после чего производится, в зависимости от того, открыт свечной кран или закрыт, заполнение или продувка нагнетателя в течении n1 секунд. На четвёртом этапе производится закрытие свечного крана (если он открыт), а также запускается подалгоритм «Стравливание АВОГ на заполнении» необходимый для снижения давления в полости АВОГ до уровня давления в нагнетателе и обеспечения приемлемого перепада на выходном кране нагнетателя. На пятом этапе, производится закрытие байпасного крана входного крана нагнетателя, при соблюдении условия при котором модуль разницы давления газа в полости нагнетателя и в АВОГ меньше или равен определённому значению (Px-a). На шестом, седьмом и восьмом этапах, после выдержки времени производится повторное открытие байпасного крана входного крана нагнетателя, которое необходимо для компенсации потерь давления в полости нагнетателя на уплотнениях. Подалгоритм завершается на девятом этапе при выполнении условий закрытого свечного крана и модуля разницы давления газа в нагнетателе и давления в АВОГ меньше или равном установленному значению (Px-d).
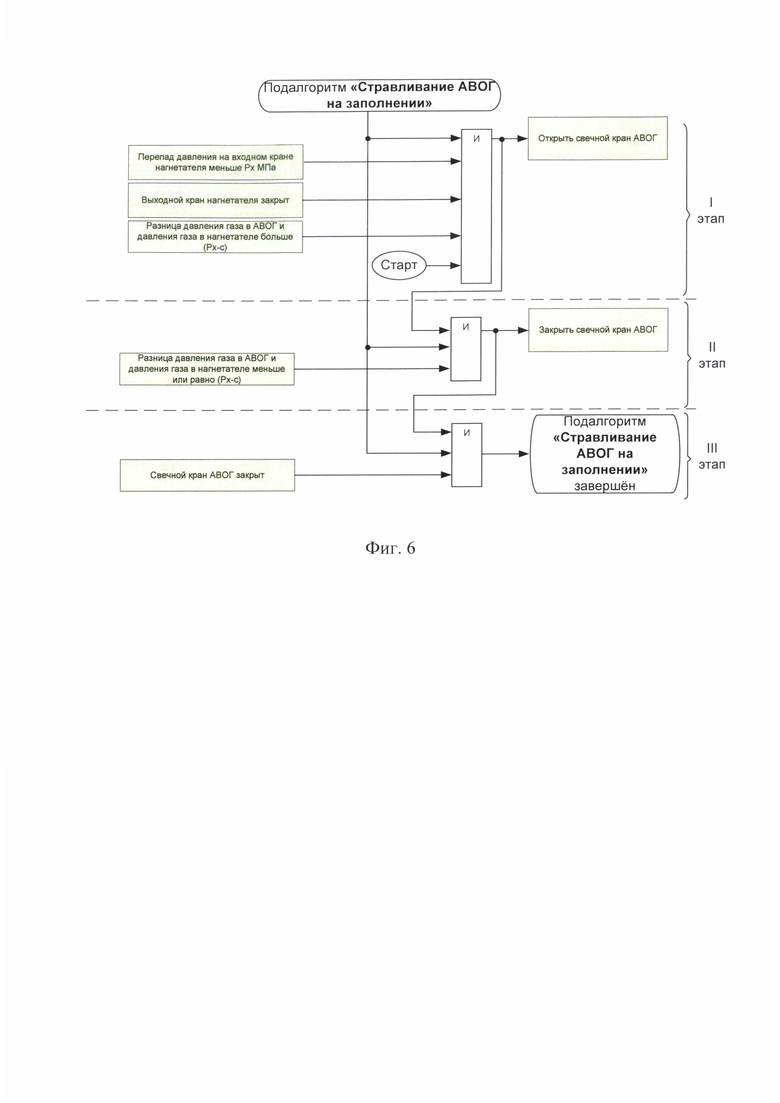
Подалгоритм «Стравливание АВОГ на заполнении» (фиг. 6) состоит из трёх основных этапов, и выполняется при соблюдении условий: наличия перепада на входном кране нагнетателя меньшем значения Px, закрытом состоянии входного крана нагнетателя, разницы давления в АВОГ и давления газа в нагнетателе больше установленного значения (Px-c). При этом на первом этапе открывается свечной кран АВОГ, на втором этапе контролируется разница давлений в АВОГ и нагнетателе. В случае установления данной разницы меньше или равной значению (Px-c) производится закрытие свечного крана АВОГ на третьем этапе и завершение подалгоритма.
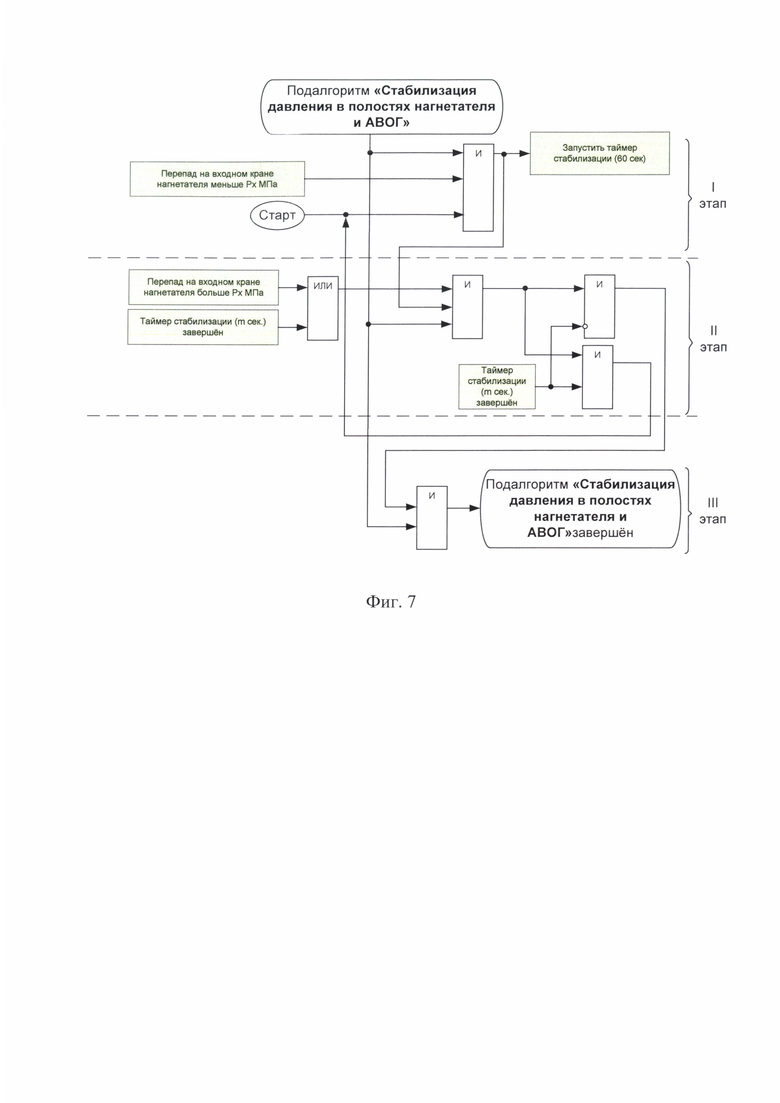
Подалгоритм «Стабилизация давления в полостях нагнетателя и АВОГ» (фиг. 7) состоит из трёх основных этапов. На первом этапе при открытом байпасном кране входного крана запускается таймер. На втором этапе контролируется перепад (Px) на входном кране нагнетателя в течение определённого времени (m секунд). В случае, изменения перепада на большую величину чем Px, производится сброс таймера в начальное значение. Подалгоритм завершается на третьем этапе при истечении времени таймера равного m секунд.
Список источников:
1. Козаченко А.Н. Эксплуатация компрессорных станций магистральных газопроводов / Козаченко А.Н. - М.: Нефть и газ, 1999. - 463 с. ISBN 5-7246-0055-2.
2. Правила эксплуатации магистральных газопроводов. СТО Газпром 2-3.5-454-2010. - Утв. распоряжением ОАО «Газпром» №130. 24.05.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОТКАЧКИ СТРАВЛИВАЕМОГО ГАЗА НА КОМПРЕССОРНОЙ СТАНЦИИ | 2024 |
|
RU2838111C1 |
| Способ осушки технологических трубопроводов компрессорного цеха | 2023 |
|
RU2820376C1 |
| Способ откачки газа из центробежных нагнетателей одного или нескольких газоперекачивающих агрегатов компрессорных цехов магистрального газопровода, соединенных межцеховыми перемычками и система для ее осуществления | 2020 |
|
RU2754647C1 |
| СПОСОБ ВЫТЕСНЕНИЯ ВРЕМЕННЫХ ГЕРМЕТИЗИРУЮЩИХ УСТРОЙСТВ ПРИ ЭКСПЛУАТАЦИИ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ В МНОГОНИТОЧНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728112C1 |
| Способ откачки газа из трубопроводной обвязки камеры запуска очистных устройств и устройство для его осуществления | 2021 |
|
RU2775332C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| СПОСОБ АВАРИЙНОЙ ОСТАНОВКИ ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2001 |
|
RU2209349C2 |
| СПОСОБ ОСУШКИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ КОМПРЕССОРНОГО ЦЕХА | 2017 |
|
RU2671762C1 |
| Байпасная и импульсная обвязки линейных кранов в составе крановых узлов многониточных магистральных газопроводов, проложенных в одном технологическом коридоре | 2021 |
|
RU2777810C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕГРУЗКОЙ ГАЗОПЕРЕКАЧИВАЮЩИХ АГРЕГАТОВ ОДНОГО ЦЕХА ДОЖИМНОЙ КОМПРЕССОРНОЙ СТАНЦИИ | 2024 |
|
RU2837177C1 |
Изобретение относится к области автоматизированных систем управления технологическими процессами и используется при выполнении технологической операции заполнения полости агрегата воздушного охлаждения газа (далее - АВОГ) в технологической обвязке газоперекачивающего агрегата (далее - ГПА) с индивидуальным расположением АВОГ при наличии крана между полостью АВОГ и полостью нагнетателя. В системах автоматического управления (далее - САУ), содержащих контроллер, модули входных сигналов (сигналов с датчиков), модули выходных сигналов (сигналы управления исполнительными механизмами), внедряют линейный алгоритм, включающий подалгоритмы, реализующие функции процесса заполнения, стабилизации и стравливания газа, позволяющий производить заполнение полости агрегата воздушного охлаждения газа через байпасный кран входного крана нагнетателя ГПА. При использовании изобретения обеспечивается автоматизация технологического процесса заполнения АВОГ с целью ускорения процесса заполнения полости АВОГ и исключения ошибок персонала в процессе заполнения АВОГ. 7 ил.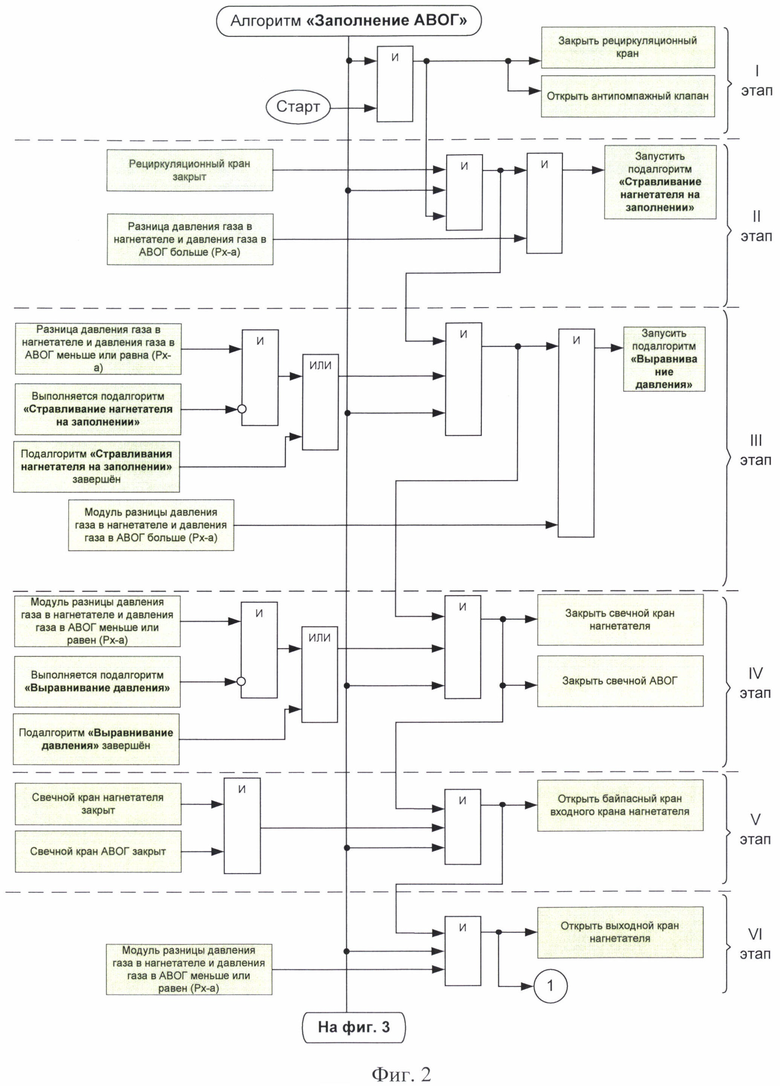
Способ заполнения контура агрегата воздушного охлаждения газа (АВОГ) через полость нагнетателя, характеризующийся тем, что в систему автоматического управления, содержащую контроллер, модули входных и выходных сигналов, внедряют линейный алгоритм, включающий подалгоритмы, при этом способ содержит следующие этапы:
- задают значение переменных: Px – параметр, зависящий от перепада давления, при котором возможна перестановка основной трубопроводной арматуры; a, b, c, d – переменные, компенсирующие потери давления через уплотнения, n1 и n2 - переменные, определяющие время (в секундах) продувки полости нагнетателя, объединённой полости АВОГ и нагнетателя, m – переменная, определяющая время (в секундах) стабилизации давления в объединённой полости АВОГ и нагнетателя, при этом a <b, b <d, d < c;
- запускают алгоритм «Заполнение АВОГ», в котором
- на первом этапе производится подготовка трубопроводной арматуры (ТПА) путём перестановки в исходное состояние;
- на втором этапе при условии, что давление газа в нагнетателе выше давления в полости АВОГ больше чем на (Px-a), производится запуск подалгоритма «Стравливание нагнетателя на заполнении»;
- на третьем этапе при условии, что модуль разницы давления в полости АВОГ и в нагнетателе больше определённого значения (Px-a), запускается подалгоритм «Выравнивание давления» либо производится переход на следующий этап;
- на четвёртом этапе производится закрытие свечных кранов полости нагнетателя и полости АВОГ;
- на пятом этапе алгоритма открывается байпасный кран входного крана нагнетателя ГПА;
- на шестом этапе при выполнении условия, что модуль разницы давления газа в нагнетателе и давления газа в АВОГ меньше или равен установленному значению (Px-a), производится открытие входного крана нагнетателя;
- на седьмом этапе при выполнении условия, что давление в полости АВОГ меньше или равно установленному (Px-a), производится открытие свечного крана АВОГ;
- на восьмом этапе и девятом этапах производится открытие байпасного крана входного крана нагнетателя на n2 секунд, при этом, если на данный момент открыт свечной кран, производится продувка нагнетателя и полости АВОГ;
- на десятом и одиннадцатом этапах производится закрытие свечного крана и запускается подалгоритм «Стабилизация давления в полостях нагнетателя и АВОГ»;
- на двенадцатом этапе при завершении подалгоритма «Стабилизация давления в полостях нагнетателя и АВОГ» и допустимом перепаде давления на входном кране (Px-b) производится открытие входного крана нагнетателя;
- на тринадцатом этапе производится закрытие байпасного крана входного крана нагнетателя;
- на четырнадцатом и пятнадцатом этапах производится открытие рециркуляционного крана и завершение работы алгоритма заполнения АВОГ, при этом
- подалгоритм «Стравливание нагнетателя на заполнении» содержит три основных этапа: на первом этапе производится открытие свечного крана нагнетателя, который на этапах 2 и 3 закрывается при достижении разницей давления в нагнетателе и давления газа в АВОГ определённого в подалгоритме значения (Px-a);
- подалгоритм «Выравнивание давления» состоит из девяти основных этапов: на первом этапе при условии, что давление в нагнетателе меньше или равно установленному (Px-a), производится открытие свечного крана нагнетателя либо осуществляется переход на следующий этап; на втором и третьем этапах производится открытие байпасного крана входного крана нагнетателя, после чего производится в зависимости от того, открыт свечной кран или закрыт, заполнение или продувка нагнетателя в течение n1 секунд; на четвёртом этапе производится закрытие свечного крана (если он открыт), а также запускается подалгоритм «Стравливание АВОГ на заполнении», необходимый для снижения давления в полости АВОГ до уровня давления в нагнетателе и обеспечения приемлемого перепада на выходном кране нагнетателя; на пятом этапе производится закрытие байпасного крана входного крана нагнетателя при соблюдении условия, при котором модуль разницы давления газа в полости нагнетателя и в АВОГ меньше или равен определённому значению (Px-a); на шестом, седьмом и восьмом этапах после выдержки времени производится повторное открытие байпасного крана входного крана нагнетателя, которое необходимо для компенсации потерь давления в полости нагнетателя на уплотнениях; на девятом этапе при выполнении условий закрытого свечного крана и значении модуля разницы давления газа в нагнетателе и давления в АВОГ меньше или равном установленному значению (Px-d) подалгоритм завершается;
- подалгоритм «Стравливание АВОГ на заполнении» состоит из трёх основных этапов и выполняется при соблюдении условий: наличия перепада давления на входном кране нагнетателя меньше значения Px, закрытом состоянии входного крана нагнетателя, разницы давления в АВОГ и давления газа в нагнетателе больше установленного значения (Px-c), при этом на первом этапе открывается свечной кран АВОГ, на втором этапе контролируется разница давлений в АВОГ и нагнетателе, в случае установления данной разницы меньше или равной значению (Px-c) производится закрытие свечного крана АВОГ на третьем этапе и завершение подалгоритма;
- подалгоритм «Стабилизация давления в полостях нагнетателя и АВОГ» состоит из трёх основных этапов: на первом этапе при открытом байпасном кране входного крана запускается таймер; на втором этапе контролируется перепад давления на входном кране нагнетателя в течение m секунд, в случае изменения перепада на большую величину чем Px, производится сброс таймера в начальное значение; подалгоритм завершается на третьем этапе при истечении времени таймера, равного m секунд.
| Козаченко А.Н | |||
| Эксплуатация компрессорных станций магистральных газопроводов / Козаченко А.Н | |||
| - М.: Нефть и газ, 1999 | |||
| Приспособление для автоматического перевода стрелок машинистом | 1922 |
|
SU463A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| Способ стабилизации перепада давления в системе уплотнения газоперекачивающего агрегата | 2017 |
|
RU2660743C1 |
| Автопоезд для перевозки длинномерных материалов | 1960 |
|
SU132487A1 |

