Изобретение относится к медицине, а именно к стоматологической хирургии, и может быть использовано для точной установки микроимплантатов, в том числе ортоимплантатов или зубных имплантатов, с помощью имплантовода, при лечении пациентов с аномалиями зубочелюстной системы.
Стоматологическая хирургия обычно включает установку стоматологического микроимплантата. В качестве стоматологического микроимплантата может быть зубной имплантат или, например минивинт для крепления ортодонтических аппаратов. Установка стоматологического микроимплантата требует высокой степени точности по таким показателям, как конечное местоположение, осевая ориентация и глубина окончательного расположения микроимплантата.
Для точной установки стоматологического микроимплантата в полости рта пациента используют хирургический шаблон, адаптированный к полости рта пациента и снабженный выступом с направляющим отверстием для размещения в нем, например, имплантовода. При этом важно соблюсти заданную глубину ввинчивания стоматологического микроимплантата. Обычно это достигается за счет того, что имплантовод, которым вкручивается стоматологический микроимплантат, снабжен уступом, который упирается в торец выступа направляющего отверстия в заранее заданном положении.
Наибольшее затруднение вызывает ограниченность пространства проведения хирургической операции, а также сложность визуального наблюдения проводящим операцию врачом. Момент касания уступа имплантовода с выступом направляющего отверстия обычно приходится определять либо тактильно, что резко уменьшает точность, либо визуально, что зачастую бывает неудобно. Если хирург остановит вращение имплантовода раньше момента касания, стоматологический микроимплантат окажется вкручен на глубину меньше требуемой, если хирург продолжит вращение имплантовода после касания, стоматологический микроимплантат либо окажется вкручен на глубину больше требуемой, за счет осевого смещения относительно имплантовода, либо будет прокручиваться на месте и чрезмерно разрушать кость, работая как фреза.
В патенте CN 211834804 (приор. 13.12.2019) предложено «Сменное направляющее устройство для сверления кости для стоматолога», которое, с целью наблюдения за глубиной, содержит направляющую трубку позиционирования и отличается тем, что одна сторона направляющей трубки позиционирования снабжена подвижной фиксирующей конструкцией на одной стороне внешней поверхности. Вторая внешняя поверхность цилиндра направляющей позиционирования снабжена второй подвижной фиксирующей конструкцией, а внешняя поверхность переднего конца цилиндра направляющей позиционирования снабжена устройством наблюдения глубины, которым по-сути является продольный паз, расположенный на стенке направляющего цилиндра. Недостатком предложенной конструкции является необходимость визуального наблюдения за глубиной позиционирования вворачиваемого в кость инструмента, определяемой по шкале глубины, расположенной на устройстве, что часто затруднительно. Также точность осевого позиционирования направляющего отверстия весьма невысока, так как зависит от крепления устройства на соседние зубы.
Наиболее близким аналогом, выбранные в качестве прототипа к заявляемому изобретению, является полезная модель по патенту РФ №177272 (Приор.: 04.09.2017, опубл.: 14.02.2018), в которой описан хирургический шаблон для установки имплантатов, содержащий шину, внутренняя поверхность которой конгруэнтна поверхности зубов соответствующей челюсти пациента и прилегающей к ним слизистой оболочке альвеолярного отростка. При этом шина выполнена в соответствии с анатомическими особенностями зубов пациента методом 3D-прототипирования на основе предварительного компьютерного планирования расстановки имплантатов по данным компьютерной томографии и с возможностью жесткой фиксации на зубах пациента. В шине выполнены отверстия, количество которых и расположение соответствует плану установки имплантатов. При этом в отверстия установлены направляющие металлические втулки, позиционированные в соответствии с результатами компьютерного планирования. Причем шина выполнена на весь зубной ряд. С вестибулярной стороны шины в каждой направляющей втулке и в соответствующей ей части шины выполнена общая вертикальная выемка, которая ограничена снизу полуцилиндром с длиной образующей, равной 1 мм и направляющие втулки выполнены с возможностью размещения в них сменных втулок.
Предлагаемое полезная модель позволяет решить проблему снижения требования к ширине открывания рта пациентом при одновременном обеспечении фиксации положения режущего инструмента, и повысить точность осевого позиционирования направляющего отверстия за счет выполнения индивидуального шаблона для конкретного пациента. Однако остается недостаток, связанный с затруднением при определении хирургом момента прекращения вращения имплантовода, так как устанавливаемые металлические трубки затрудняют визуализацию процесса операции, что не гарантирует точного введения микроимплантатов по глубине при ортодонтических или стоматологических операциях.
Задачей предлагаемого изобретения упрощение технологии точного введения имплантатов или микроимплантатов по глубине при ортодонтических или стоматологических операциях.
Техническим результатом является достижение максимальной точности установки имплантатов или микроимплантатов одновременно по направлению и глубине при ортодонтических или стоматологических операциях.
Задача решается, а технический результат достигается тем, что для точного введения микроимплантов при ортодонтических или стоматологических операциях, используют способ, который заключается в том, что проводят компьютерную томографию пациента. Строят 3D модель челюсти пациента, по которой изготавливают индивидуальный шаблон в виде капы, снабженный по меньшей мере одним направляющим отверстием для введения микроимплантата, расположенным и направленным в соответствии с выбранным врачом планом лечения. Устанавливают шаблон в ротовой полости пациента. Через направляющее отверстие вводят микроимплантат за счет вращения установленного на микроимплантате имплантовода. При этом вращение имплантовода и введение микроимплантата прекращается в результате замыкания электрической цепи, происходящего при соприкосновении выступающей поверхности имплантовода с контактной металлической накладкой, расположенной на торцевой поверхности выступа шаблона с расположенным в нем направляющим отверстием для введения микроимплантата, автоматически. Либо введение микроимплантата прекращают при возникновении светового и/или звукового сигнала, возникающего в результате замыкания.
Также задача решается, а технический результат достигается тем, что устройство для реализации способа введения микроимплантата при ортодонтических или стоматологических операциях содержит индивидуальный шаблон в виде каппы, изготовленный по 3D модели челюсти пациента. Индивидуальный шаблон выполнен с возможностью установки в полости рта и снабжен по меньшей мере одним направляющим отверстием для введения микроимплантата, расположенным и направленным в соответствии с выбранным врачом планом лечения. Также устройство содержит имплантовод, выполненный с возможностью размещения в направляющем отверстии и предназначенный для введения микроимплантатов. При этом устройство снабжено электрически соединенными между собой источником питания устройства, сигнальным или размыкающим элементом и контактными проводами, соединяющими электропроводящий торец имплантовода и металлическую накладку, расположенную на торцевой поверхности выступа шаблона с расположенным в нем направляющим отверстием для введения микроимплантата.
В частном случае в качестве источника тока и сигнального устройства, издающего светозвуковой сигнал, может быть использован апекслокатор.
Также в качестве сигнального устройства может быть использован источник света, либо источник звука.
Также задача решается, а технический результат достигается тем, что индивидуальный шаблон устройства для реализации способа введения микроимплантата при ортодонтических или стоматологических операциях выполнен в виде капы по 3D модели челюсти пациента, с возможностью закрепления в полости рта пациента. Индивидуальный шаблон снабжен по меньшей мере одним направляющим отверстием для введения микроимплантата, расположенным и направленным в соответствии с выбранным врачом планом лечения. При этом на торцевой поверхности выступа шаблона с расположенным в нем направляющим отверстием для введения микроимплантата установлена металлическая накладка, выполненная с возможностью подключения к ней контактного провода.
В частном случае направляющее отверстие для введения микроимпланта снабжено продольным пазом, расположенным в стенке направляющего отверстия.
Использование в предлагаемом способе индивидуального шаблона, снабженного по меньшей мере одним направляющим отверстием для введения микроимпланта, расположенным и направленным в соответствии с выбранным врачом планом лечения позволяет упростить процедуру введения микроимпланта.
Введение микроимплантата по направляющему отверстию, выполненному в шаблоне, за счет вращения имплантовода делает процедуру введения значительно проще, например в сравнении с механическим введением микроимплантата.
Прекращение в момент получения сигнала о соприкосновении выступающего торца имплантовода с контактной металлической накладкой, расположенной на торцевой поверхности направляющего отверстия, позволяет практически мгновенно остановить вращение имплантовода и введение микроимплантата. Таким образом микроимплантат устанавливается просто и максимально точно по глубине и направлению в соответствии с выбранным врачом планом лечения.
Следует обратить внимание, что остановка вращения имплантовода и введение микроимплантата возможна как по звуковому и/или световому сигналу, получаемым в результате соприкосновения выступающего торца имплантовода с контактной металлической накладкой, расположенной на торцевой поверхности направляющего отверстия, так и в автоматическом режиме, например при использовании реле, размыкающем цепь питания имплантовода.
То, что заявляемое устройство снабжено электрически соединенными между собой источником питания устройства, сигнальным устройством и контактными проводами, соединяющими электропроводящий торец имплантовода и металлическую накладку, расположенную на торцевой поверхности направляющего отверстия индивидуального шаблона, позволяет применять технологию, при которой наиболее просто производится введение микроимплантатов по глубине при ортодонтических или стоматологических операциях. Соединенные между собой источник питания устройства, сигнальное устройство и контактные провода, прикрепленные к электропроводящему торцу имплантовода и металлической накладке, расположенной на торцевой поверхности направляющего отверстия, позволяют создать электрическую цепь и получать необходимый сигнал о соприкосновении торца имплантовода и металлической накладки. А указанное соприкосновение позволяет определить, что микроимплантат достиг заданную в соответствии с выбранным врачом планом лечения глубину расположения.
Удобно и просто использовать апекслокатор в качестве источника тока и сигнального устройства, издающего светозвуковой сигнал, так как данный прибор уже снабжен всем необходимым, и необходимо только подключить его контактные провода к электропроводящему торцу имплантовода и металлической накладке, расположенной на торцевой поверхности направляющего отверстия.
Применение индивидуального шаблона в устройстве для реализации способа точного введения микроимплантатов при ортодонтических или стоматологических операциях закрепляемого в полости рта пациента, изготовленного по модели челюсти пациента в виде капы, также позволяет упростить технологию точного введения микроимплантатов по глубине. Каждое направляющее отверстие для введения микроимплантата, заранее выполненное в индивидуальном шаблоне, расположено и направлено в соответствии с выбранным врачом планом лечения. Металлическая накладка с отводом для подключения к ней контактного провода установлена на торцевой поверхности направляющего отверстия. Это позволяет создать электрическую цепь, необходимую для работы заявляемого устройства, и получать сигнал о соприкосновении торца имплантовода и металлической накладки.
Продольный паз, расположенный в стенке направляющего отверстия для введения микроимплантов, позволяет упростить процесс установки микроимплантата, так как у пациента отсутствует необходимость широко раскрывать рот при введении микроимплантата с имплантоводом в направляющее отверстие.
В последующем заявляемое изобретение поясняется подробным описанием конкретного, но не ограничивающего настоящее решение, примера его выполнения и прилагаемыми чертежами, на которых:
- фиг.1 – вариант устройства для реализации способа точного введения микроимплантов при ортодонтических или стоматологических операциях;
- фиг. 2 – вариант индивидуального шаблона устройства для реализации способа;
- фиг. 3 – вариант индивидуального шаблона устройства для реализации способа;
- фиг. 4 – вариант индивидуального шаблона устройства для реализации способа;
- фиг. 5 – схема работы устройства для реализации способа точного введения микроимплантов при ортодонтических или стоматологических операциях;
- фиг. 6 – электрическая схема работы устройства при использовании световой сигнализации;
- фиг. 7 – электрическая схема работы устройства при использовании звуковой сигнализации;
- фиг. 8 – электрическая схема работы устройства при использовании светозвуковой сигнализации;
- фиг. 9 - электрическая схема работы устройства с автоматическим размыканием силовой цепи имплантовода.
Один из возможных вариантов устройства для реализации способа точного введения микроимплантатов при ортодонтических или стоматологических операциях, в конкретном случае с использованием апекслокатора в качестве исполнительного сигнализирующего устройства, представлен на фиг.1.
Устройство, представленное на фиг.1, состоит из индивидуального шаблона 1 с металлической накладкой 2, имплантовода 3, первого контактного провода 4, подключенного к выводу 5 (показан на фиг.5) металлической накладки 2, второго контактного провода 6, подключенного к имплантоводу 3 через угловой наконечник, и исполнительного сигнализирующего устройства 7, которым в представленном варианте является апекслокатор. Здесь и в дальнейшем описании под имплантоводом 3 подразумевается собранная система, состоящая из вращающего устройства, которым в конкретном примере является угловой наконечник, с установленным в нем имплантоводом 3, причем указанные элементы имеют токопроводящую связь.
На фиг. 2 и 3 представлен индивидуальный шаблон 1 с расположенными рядом двумя направляющими отверстиями 8, на торцах которых расположена одна металлическая накладка 2. На фиг. 4 представлен вариант индивидуального шаблона 1 с двумя разнесенными направляющими отверстиями 8, на торцах каждого из которых расположено по металлической накладке 2.
Каждое направляющее отверстие 8 в представленных вариантах снабжено продольным пазом 9, расположенным в стенке направляющего отверстия 8, который позволяет упростить процесс установки микроимплантата 10, так как у пациента отсутствует необходимость широко раскрывать рот при введении микроимплантата 10 с имплантоводом 3 в направляющее отверстие 8. Это действие производят за счет бокового введения микроимплантата 10 через паз 9.
Подробно описание процесса изготовления индивидуального шаблона 1 приведено ниже и проиллюстрировано на фиг. 5.
На фиг.5 буквами обозначены:
d – диаметр рабочей части имплантовода 3;
D – диаметр уступа 11 имплантовода 3;
L – длина рабочей части имплантовода 3 (от его торца с установленным микроимплантатом 10 до уступа 11 имплантовода 3);
S – толщина металлической накладки 2 шаблона 1;
D2 – наружный диаметр выступа 12 с направляющим отверстием 8 шаблона 1;
d1 – внутренний диаметр металлической накладки 2 шаблона 1;
D1 – наружный диаметр металлической накладки 2 шаблона 1.
Процесс изготовления индивидуального шаблона 1 состоит из следующих последовательных действий.
Выбирают требуемый типоразмер микроимплантатов 10, их положение на челюсти и глубину их ввинчивания, исходя из формы челюсти пациента, данных компьютерной томографии.
Выбирают типоразмер имплантовода 3. В соответствии с выбранным типоразмером определяются параметры d, D, L.
Задают положение плоскости уступа 11 имплантовода 3 в соответствии с требуемым положением микроимплантата 10. Плоскость уступа 11 имплантовода 3 располагается с отступом на величину L от торца имплантовода 3, находящимся в конечном положении со вставленным в него микроимплантатом 10.
Выбирают размеры металлической накладки 2 шаблона 1:
d1 = d + 2Δ1, где Δ1 – требуемый зазор между рабочей частью имплантовода 3 и металлической накладкой 2 шаблона 1, от 0,2 до 0,5 мм.
D1 = D + 2Δb, где Δb – запас ширины металлической накладки 2 шаблона 1. В результате ширина металлической накладки 2 шаблона 1 равная (D1 - d1)/2 должна быть не меньше 1,5…2 мм.
Толщину S металлической накладки 2 выбирают исходя из способа ее изготовления и конкретного металла таким образом, чтобы она имела достаточную прочность и жесткость.
Задают положение металлической накладки 2 шаблона 1 в соответствии с требуемым положением микроимплантатов 10 таким образом, чтобы они были соосны микроимплантату 10 и соответственно имплантоводу 3, а также чтобы они соприкасались с уступом 3 имплантовода 3.
Задают размеры выступа 12 шаблона 1:
D2 = D1 + 2Δ2, где Δ2 – запас ширины торцов выступа 12 шаблона 1. Δ2 может быть равна нулю, но нужно учитывать, что получившийся размер D2 должен обеспечивать достаточную толщину стенок выступа 12 шаблона 1. Таким образом размер D2 можно выбрать для обеспечения прочности выступа 12 шаблона 1 и проверить, что он не будет меньше D1.
Задают положение выступа 12 шаблона 1, исходя из того, что выступ 12 шаблона 1 располагается соосно микроимплантату 10 и его рабочий торец совмещается с нижним торцом металлической накладки 2 шаблона 1. Таким образом, торец выступа 12 шаблона 1 оказывается смещен от упора 11 имплантовода 3 в конечном положении и от внешней поверхности металлической накладки 2 шаблона 1 на величину S.
Индивидуальный шаблон 1 можно разработать и изготовить на основе конкретных данных пациента, полученных, например, посредством магнитно-резонансной томографии (МРТ), рентгеновской компьютерной томографии (РКТ) или рентгеновской компьютерной томографии с конусообразным лучом (СВСТ). На основе полученных данных строится точное 3D изображение кости и/или челюстной кости и/или зубного ряда и/или тканей полости рта пациента, которое можно применять для планирования хирургической операции, а именно для определения желательного положения, ориентации и глубины микроимплантата. На основе полученных данных определяют положение выступа 12 с расположенным в нем направляющим отверстием 8.
Таким образом с помощью компьютерной программы создают 3D-модель тела шаблона 1, прилегающего к зубам и/или слизистой, и программно объединяют с рассчитанным положением выступа 12 шаблона 1.
По полученной 3D-модели из полимера производят шаблон 1.
Фиксацию металлической накладки 2 шаблона 1 возможно осуществить, например, с помощью штифтов, располагаемых на их тыльной стороне, контактирующей с торцом выступа 12 шаблона 1, на чертежах не показаны. Для этих штифтов на торце выступа 12 шаблона 1 делают отверстия. При наличии двух и более штифтов металлическая накладка 2 выступа 12 шаблона 1 будет спозиционирована в нужном положении. Ее фиксация осуществляют за счет того, что отверстия на торце выступа 12 шаблона 1 делают меньше номинального диаметра штифтов. Штифты металлической накладки 2 шаблона 1 запрессовывают в отверстия на торце выступа 12 шаблона 1.
Варианты электрических схем исполнительного сигнализирующего устройства 7 представлены на фиг.6, 7, 8 и 9. На фиг.6 показана схема со световым сигнализирующим устройством, в качестве которого, например, может быть использован светодиод 13. На фиг.7 показана схема со звуковым сигнализирующим устройством, в качестве которого, например, может быть использован пьезоизлучатель 14. На фиг.8 показана схема со световым и звуковым сигнализирующим устройствам, установленными параллельно. Примером может быть апекслокатор.
Во всех описанных схемах сигнал возникает при замыкании первого контактного провода 4, подключенного к выводу 5 металлической накладки 2, и второго контактного провода 6, подключенного к имплантоводу 3 через угловой наконечник.
В схеме, представленной на фиг. 9, при замыкании первого контактного провода 4, подключенного к выводу 5 металлической накладки 2, и второго контактного провода 6, подключенного к имплантоводу 3 через угловой наконечник, сигнал подается на реле 15, которое при срабатывании через исполнительный элемент 16 разрывает цепь, питающую двигатель 17, например, физиодиспенсера вращающего имплантовод 3.
Для точного введения микроимплантата 10 при ортодонтических или стоматологических операциях с использованием заявляемого устройства необходимо произвести следующие операции, см. фиг.1. В конкретном примере, показанном на фиг.1, в качестве исполнительного сигнализирующего устройства 7 использован апекслокатор.
Вставить микроимплантат 10 в имплантовод 3. Закрепить второй контактный провод 6 на угловом наконечнике, в который вставлен имплантовод 3.
Установить индивидуальный шаблон 1 во рту пациента.
Прикрепить первый контактный провод 4 сигнализирующего устройства 7 к выводу 5 металлической накладки 2. Прижать шаблон 1 к зубам пациента, чтобы убедиться в корректной установке индивидуального шаблона 1.
Завести микроимплантат 10 через продольный паз 9 в направляющее отверстие 8 и сцентрировать иплантовод 3 в направляющем отверстии 8. Производить ввинчивание микроимплантата 10 до касания упора 11 имплантовода 3 металлической накладки 2 индивидуального шаблона 1, о чем будет свидетельствовать соответствующий световой либо звуковой сигнал, либо произойдет автоматическое отключение физиодиспенсера вращающего имплантовод 3.
Вывести иплантовод 3 из направляющего отверстия 8 индивидуального шаблона 1.
При наличии более чем одного направляющего отверстия 8 или двух спаренных направляющих отверстий 8 с объединенными металлическими накладками 2 аналогично установить микроимплантаты 10 в ещё свободные направляющие отверстия 8 индивидуального шаблона 1.
Предлагаемый в изобретении способ точного введения микроимплантатов, а также устройство для его реализации и индивидуальный шаблон устройства возможно использовать при различных ортодонтических или стоматологических операциях, например таких как:
- для установки небных минивинтов для крепления ортодонтических аппаратов;
- для установки минивинтов в ретромолярную область и между корней зубов;
- для установки зубных имплантатов.
Изобретение в целом позволяет упростить технологию точного введения микроимплантатов по глубине при ортодонтических или стоматологических операциях.
При этом гарантированно достигается поставленный технический результат, а именно максимальная точность установки микроимплантов одновременно по направлению и глубине при ортодонтических или стоматологических операциях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТАНОВКИ ОРТОДОНТИЧЕСКОГО АППАРАТА, ШАБЛОН И ОРТОДОНТИЧЕСКИЙ АППАРАТ | 2019 |
|
RU2698047C1 |
| Способ диагностики и лечения пациентов с различными формами гнатической окклюзии | 2019 |
|
RU2768160C2 |
| СПОСОБ УСТАНОВКИ ОРТОДОНТИЧЕСКОГО МИКРОИМПЛАНТАТА И ШАБЛОН ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470609C2 |
| Конструкция ортодонтического аппарата | 2021 |
|
RU2758121C1 |
| Способ одномоментного изготовления направляющего хирургического шаблона для установки дентальных имплантатов и индивидуальных постоянных абатментов | 2018 |
|
RU2674919C1 |
| Способ лечения пациентов с аномалиями окклюзии в сочетании с синдромом болевой дисфункции височно-нижнечелюстного сустава | 2024 |
|
RU2838291C1 |
| Способ комбинированного расширения верхней челюсти у взрослых пациентов с сужением верхней челюсти вследствие расщелины губы и неба | 2024 |
|
RU2835468C1 |
| СПОСОБ УСТАНОВКИ ОРТОДОНТИЧЕСКОГО МИКРОИМПЛАНТАТА И КОНДУКТОР, ИСПОЛЬЗУЕМЫЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332186C1 |
| СПОСОБ ТОПОГРАФИЧЕСКОГО ОПРЕДЕЛЕНИЯ ГРАНИЦ ПОЛОСТИ ЗУБА | 2018 |
|
RU2687829C1 |
| НАПРАВЛЯЮЩИЙ ШАБЛОН ДЛЯ УСТАНОВКИ ИМПЛАНТАТОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2013 |
|
RU2574575C2 |




Группа изобретений относится к медицине, а именно к способу введения микроимплантата при ортодонтических или стоматологических операциях, устройству для его реализации и индивидуальному шаблону устройства. При осуществлении способа проводят компьютерную томографию, строят 3D-модель челюсти, по которой изготавливают шаблон в виде капы, снабженный направляющим отверстием для введения микроимплантата. Устанавливают шаблон в ротовой полости и через направляющее отверстие вводят микроимплантат за счет вращения имплантовода. Вращение имплантовода и введение микроимплантата прекращается в результате замыкания электрической цепи, происходящего при соприкосновении поверхности имплантовода с контактной металлической накладкой, автоматически, либо в ручном режиме при возникновении светового и/или звукового сигнала в результате замыкания. Устройство снабжено источником питания, сигнальным или размыкающим элементом и контактными проводами. Достигается возможность максимальной точности установки имплантатов или микроимплантатов одновременно по направлению и глубине при ортодонтических или стоматологических операциях. 3 н. и 4 з.п. ф-лы, 9 ил.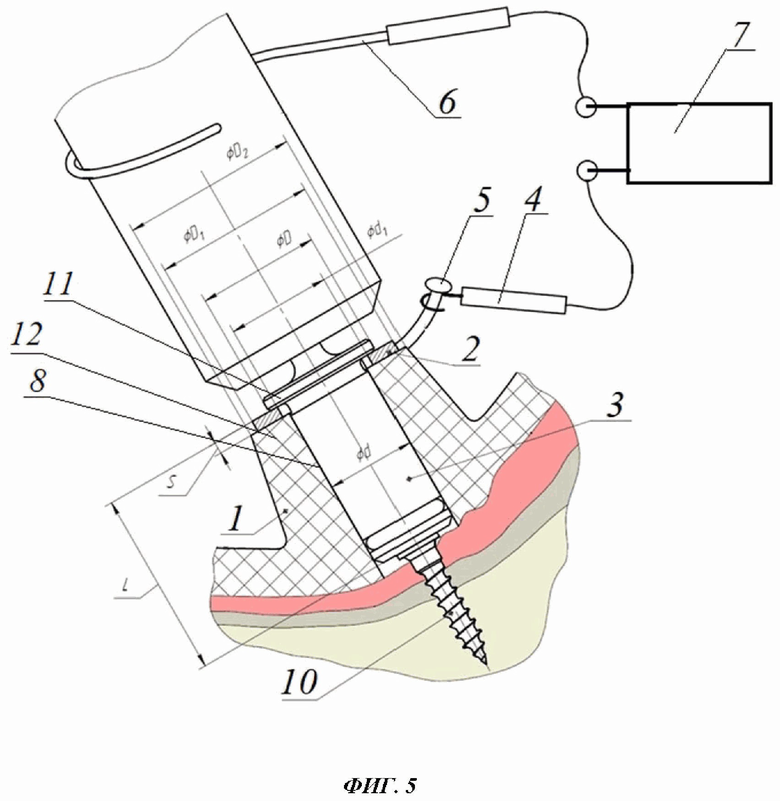
1. Способ введения микроимплантата при ортодонтических или стоматологических операциях, заключающийся в том, что проводят компьютерную томографию пациента, строят 3D-модель челюсти пациента, по которой изготавливают индивидуальный шаблон в виде капы, снабженный по меньшей мере одним направляющим отверстием для введения микроимплантата, расположенным и направленным в соответствии с выбранным врачом планом лечения, устанавливают шаблон в ротовой полости пациента и через направляющее отверстие вводят микроимплантат за счет вращения установленного на микроимплантате имплантовода, отличающийся тем, что вращение имплантовода и введение микроимплантата прекращается в результате замыкания электрической цепи, происходящего при соприкосновении выступающей поверхности имплантовода с контактной металлической накладкой, расположенной на торцевой поверхности выступа шаблона с расположенным в нем направляющим отверстием для введения микроимплантата, автоматически, либо введение микроимплантата прекращают при возникновении светового и/или звукового сигнала, возникающего в результате замыкания.
2. Устройство для реализации способа введения микроимплантата при ортодонтических или стоматологических операциях по п. 1, содержащее индивидуальный шаблон в виде каппы, изготовленный по 3D-модели челюсти пациента, выполненный с возможностью установки в полости рта и снабженный по меньшей мере одним направляющим отверстием для введения микроимплантата, расположенным и направленным в соответствии с выбранным врачом планом лечения, имплантовод, выполненный с возможностью размещения в направляющем отверстии и предназначенный для введения микроимплантатов, отличающееся тем, что устройство снабжено электрически соединенными между собой источником питания устройства, сигнальным или размыкающим элементом и контактными проводами, соединяющими электропроводящий торец имплантовода и металлическую накладку, расположенную на торцевой поверхности выступа шаблона с расположенным в нем направляющим отверстием для введения микроимплантата.
3. Устройство по п. 2, отличающееся тем, что в качестве сигнального элемента использован апекслокатор.
4. Устройство по п. 2, отличающееся тем, что в качестве сигнального элемента использован источник света.
5. Устройство по п. 2, отличающееся тем, что в качестве сигнального элемента использован источник звука.
6. Индивидуальный шаблон устройства для реализации способа введения микроимплантата при ортодонтических или стоматологических операциях по п. 1, выполненный в виде капы по 3D-модели челюсти пациента, с возможностью закрепления в полости рта пациента, снабженный по меньшей мере одним направляющим отверстием для введения микроимплантата, расположенным и направленным в соответствии с выбранным врачом планом лечения, отличающийся тем, что на торцевой поверхности выступа шаблона с расположенным в нем направляющим отверстием для введения микроимплантата установлена металлическая накладка, выполненная с возможностью подключения к ней контактного провода.
7. Индивидуальный шаблон по п. 6, отличающийся тем, что в стенке направляющего отверстия для введения микроимплантата расположен продольный паз.
| Хирургический набор инструментов для зубной имплантации | 2020 |
|
RU2758244C1 |
| Способ одномоментного изготовления направляющего хирургического шаблона для установки дентальных имплантатов и индивидуальных постоянных абатментов | 2018 |
|
RU2674919C1 |
| ЦЕНТРОБЕЖНО-ПУЛЬСАЦИОННЫЙ АППАРАТ ДЛЯ РАЗМОЛА | 0 |
|
SU177272A1 |
| US 10136968 B2, 27.11.2018 | |||
| US 8936466 B2, 20.01.2015 | |||
| US 20140087326 A1, 27.03.2014. | |||
