Изобретение относится к машиностроению и может быть использовано для снижения уровня вибрационных полей в элементах приборов, машин и механизмов, а также применимо для создания активной виброизоляционной платформы, предназначенной для размещения на ней чувствительного к вибрационным воздействиям оборудования, в частности относится к способам активного контроля вибраций.
Традиционно для снижения уровня вибрационных полей используются пассивные системы (амортизаторы и инерциальные демпферы) и активные системы (воздействующие на объект виброзащиты акютатором).
Пассивные способы и системы гашения вибрационных полей, несмотря на простоту и сравнительную дешевизну реализации, имеет недостаток, заключающийся в низкой эффективности пассивных методов на низких частотах.
Другим способом решения подобных задач является активное гашение, то есть использование управляемых вибрационных излучателей, создающих воздействие, снижающее суммарный уровень вибраций в заданной области пространства. При этом целью задачи активного гашения является формирование необходимых сигналов, подаваемых на управляемые излучатели.
Сложность состоит в том, что для реализации известных методов активного гашения необходимо использовать устройство цифровой обработки сигналов реального времени.
По патенту RU2572664, публ. 20.01.2016, МПК G10K 11/178 известно устройство активного гашения вибраций, содержащее датчики периода вращения валов механизмов, равное числу компенсирующих источников и контрольных приемников, установленных на фундаментной конструкции, электронный тракт системы гашения, состоящий из анализатора, дискретного интегратора, синтезатора, формирователя экспоненциальных функций, измерителя периода, причем выходы датчиков периода вращения валов механизмов соединены с входами формирователя экспоненциальных функций и входами измерителя периода, выходы контрольных приемников соединены с первыми входами анализатора, выход измерителя периода соединен со вторым входом анализатора, выход формирователя экспоненциальных функций соединен с третьим входом анализатора и первым входом синтезатора, отличающееся тем, что оно снабжено модальным анализатором и модальным синтезатором, при этом выход анализатора последовательно соединен с входом модального анализатора, дискретного интегратора, модального синтезатора и вторым входом синтезатора, выходы которого соединены с входами компенсирующих источников.
Однако устройство-аналог имеет недостаток, заключающийся в необходимости непрерывной корректировки сигналов управления компенсирующими источниками в процессе работы устройства, что требует использования высокопроизводительного устройства цифровой обработки сигналов в режиме реального времени.
По патенту US5365594, публ. 15.11.1994, МПК G10K11/178; H03H21/00; G10K11/16 известна система обработки сигналов, предназначенная для управления вибрациями, в которой в качестве входных данных используются свободные от шума сигналы первичного источника и, по меньшей мере, одного вторичного источника периодических вибраций, в которой сигналы обрабатываются для получения выходного сигнала, представляющего свободный от помех сигнал с первичного источника. Устройство активного подавления звука или вибраций, содержит:
• измерительное устройство, имеющее выход для создания компенсирующего сигнала;
• набор датчиков звука или вибраций;
• набор управляемых излучателей звука или вибраций;
• АЦП для обработки сигналов указанных датчиков звука или вибрации.
• управляющий контроллер для формирования сигнала подавления
К недостаткам способа-аналога можно отнести невозможность отслеживания предлагаемым устройством быстрых изменений частоты вибрационного воздействия, например при изменении скорости вращения привода механизма или изменении нагрузки.
Наиболее близким аналогом (прототип) по технической сущности предлагаемого способа является способ и устройство для активного подавления основного источника шума для создания желаемого уровня шума по меньшей мере в одном местоположении, известный по патенту WO9424970, публ. 10.11.1994, МПК G10K11/178; H04B1/12; A61F11/06; H03B29/00; H04B15/00, включающий следующие этапы:
• управление по меньшей мере одним исполнительным механизмом с помощью процессора;
• выбор мест размещения датчиков остаточных вибраций;
• предоставление процессору опорного сигнала первичного шума в блочном формате;
• направление выходного сигнала датчика ошибки в блочном формате на процессор;
• моделирование взаимосвязи между работой исполнительных механизмов и выходным сигналом датчика ошибки с помощью адаптивных фильтров;
• формирование сигнала подавления от исполнительных механизмов, управляемых процессором, на основе модели и опорного сигнала первичного шума;
• адаптацию коэффициентов фильтра в ответ на сравнение сигналов ошибки с моделью в процессоре.
Однако способ-прототип имеет недостаток, заключающийся в необходимости непрерывной адаптации коэффициентов формирующих фильтров в процессе функционирования системы с использованием градиентных методов, что требует использования высокопроизводительного устройства цифровой обработки сигналов, выполняющего вычисления в режиме реального времени. Это увеличивает время настройки алгоритмов определения параметров компенсирующего сигнала, удорожает и усложняет практическую реализацию системы компенсации.
Технической задачей, решаемой данным изобретением является уменьшение времени настройки алгоритма определения параметров компенсирующего сигнала при одновременном снижении требований к вычислительной мощности используемого устройства обработки сигналов посредством отказа от высокопроизводительных вычислений в реальном времени.
Технический результат в предлагаемом способе достигается тем, что он, как и прототип включает в себя размещение датчиков остаточных вибраций в местах, требующих гашения вибраций, передачу сигнала с опорных датчиков и сигналов с датчиков остаточных вибраций в блок вычисления параметров устройства компенсирующего воздействия, определение параметров формирующих фильтров компенсирующего сигнала, генерацию компенсирующих сигналов при помощи преобразования формирующими фильтрами сигнала с опорных датчиков.
Новым в предлагаемом способе является то, что определение параметров формирующих фильтров компенсирующего сигнала осуществляют по ограниченной по времени выборке сигналов с опорных датчиков и датчиков остаточных вибраций, что не требует расчета и постоянной коррекции параметров формирующих фильтров в режиме реального времени, и в качестве вычислительного метода применяют метод наименьших квадратов.
Способ осуществляют следующим образом.
Осуществляют регистрацию сигналов в течение определенного промежутка времени с располагаемого рядом с источником компенсируемых вибраций 1 опорного датчика 2 и датчиков остаточных вибраций 3. Длина промежутка времени определяется экспериментально в зависимости от конкретной реализации устройства.
Производят вычисление импульсных характеристик формирующих фильтров в блоке вычисления параметров устройства компенсирующего воздействия 5.
Вычисленные коэффициенты передаются в устройство цифровой обработки сигналов 4, обеспечивающее вычисление свертки сигнала с опорного датчика 2 с импульсными характеристиками формирующих фильтров и формирование компенсирующих сигналов, подаваемых на управляемые излучатели 6.
Вычисление импульсных характеристик формирующих фильтров производится в частотной области. При этом осуществляется минимизация уровня остаточных вибраций на каждой из частотных компонент.
Вычисление производят следующим образом:
Поле, регистрируемое датчиками остаточных вибраций 3 складывается из поля, создаваемого компенсируемым источником и полей, создаваемых управляемыми излучателями 6:
Yp - поле, создаваемое источником вибраций 1, регистрируемое опорными датчиками 2 в точках их расположения:
Yp= Pv, (1)
где v - сигнал, регистрируемый опорными датчиками 2, P - передаточная матрица от источника вибраций до датчиков остаточных вибраций 3.
Ys - поле, создаваемое управляемыми излучателями 6, регистрируемое датчиками остаточных вибраций 3 в точках их расположения:
Y s = Sy, (2)
где S - передаточная матрица от управляемых излучателей 6 до датчиков остаточных вибраций 3 на фиксированной частоте, y – напряжения, подаваемые на управляемые излучатели 6.
y = Wv, (3)
где – W - матрица, составленная из АФЧХ формирующих фильтров.
Тогда остаточное поле, регистрируемое датчиками остаточных вибраций e:
e = Yp+ Ys = Pv + Sy (4)
Решая задачу минимизации мощности остаточных вибраций методом наименьших квадратов с учетом регуляризации, получаем уравнение:

Решая уравнение (5) и вводя регуляризацию, можно найти решение для матрицы из АФЧХ формирующих фильтров W и по полученным АФЧХ определить импульсные характеристики через обратное преобразование Фурье.

где:
A = 2SH S, В = vvH , (7)
C = -2SHYpvH (8)
где  операция векторизации матрицы,
операция векторизации матрицы,  произведение Кронекера (блочное произведение матриц), α - коэффициент регуляризации, выбираемый под конкретную систему активного гашения (определяется экспериментально), I - единичная матрица. Н – знак эрмитового сопряжения, T - знак транспонирования.
произведение Кронекера (блочное произведение матриц), α - коэффициент регуляризации, выбираемый под конкретную систему активного гашения (определяется экспериментально), I - единичная матрица. Н – знак эрмитового сопряжения, T - знак транспонирования.
Импульсные характеристики формирующих фильтров:
Н = F-1(W) (9)
где  обратное преобразование Фурье.
обратное преобразование Фурье.
Принимая во внимание уравнение (1), можно заметить, что решение не зависит от и
и  Таким образом, импульсные характеристики формирующих фильтров определяются механическими параметрами системы и не зависят от времени. Это позволяет осуществлять вычисление H не в режиме реального времени, а по определенной ограниченной по времени выборке сигналов. Таким образом, не требуется высокопроизводительного устройства цифровой обработки сигналов, производящего вычисления в режиме реального времени.
Таким образом, импульсные характеристики формирующих фильтров определяются механическими параметрами системы и не зависят от времени. Это позволяет осуществлять вычисление H не в режиме реального времени, а по определенной ограниченной по времени выборке сигналов. Таким образом, не требуется высокопроизводительного устройства цифровой обработки сигналов, производящего вычисления в режиме реального времени.
По записанным сигналам и вычисленным импульсным характеристикам формирующих фильтров Н формируются сигналы, подаваемые на управляемые излучатели.
Кроме того, использование метода наименьших квадратов вместо градиентных методов позволяет резко увеличить скорость сходимости используемого алгоритма.
Данный способ достаточно просто реализуется путем использования ПЭВМ и устройства обработки сигналов, подключенного к многоканальным АЦП и ЦАП. Назначением устройства обработки сигналов (4) при этом будет только вычисление свертки сигналов с опорных датчиков (2) с вычисленными импульсными характеристиками, без необходимости вычисления характеристик формирующих фильтров в режиме реального времени.
Работа алгоритма гашения невозможна без знания передаточных матриц от управляемых элементов к датчикам остаточных вибраций. (S - передаточная матрица от управляемых излучателей 6 до датчиков остаточных вибраций 3). Для определения данных передаточной матрицы S необходимо использование отдельной процедуры калибровки. Данная процедура заключается в подаче калибровочного сигнала (например, коротких импульсов, полосового шума, широкополосного модулированного сигнала) на каждый из управляемых излучателей 6 и вычислении требуемых передаточных характеристик по записанным с датчиков остаточных вибраций 3 сигналам.
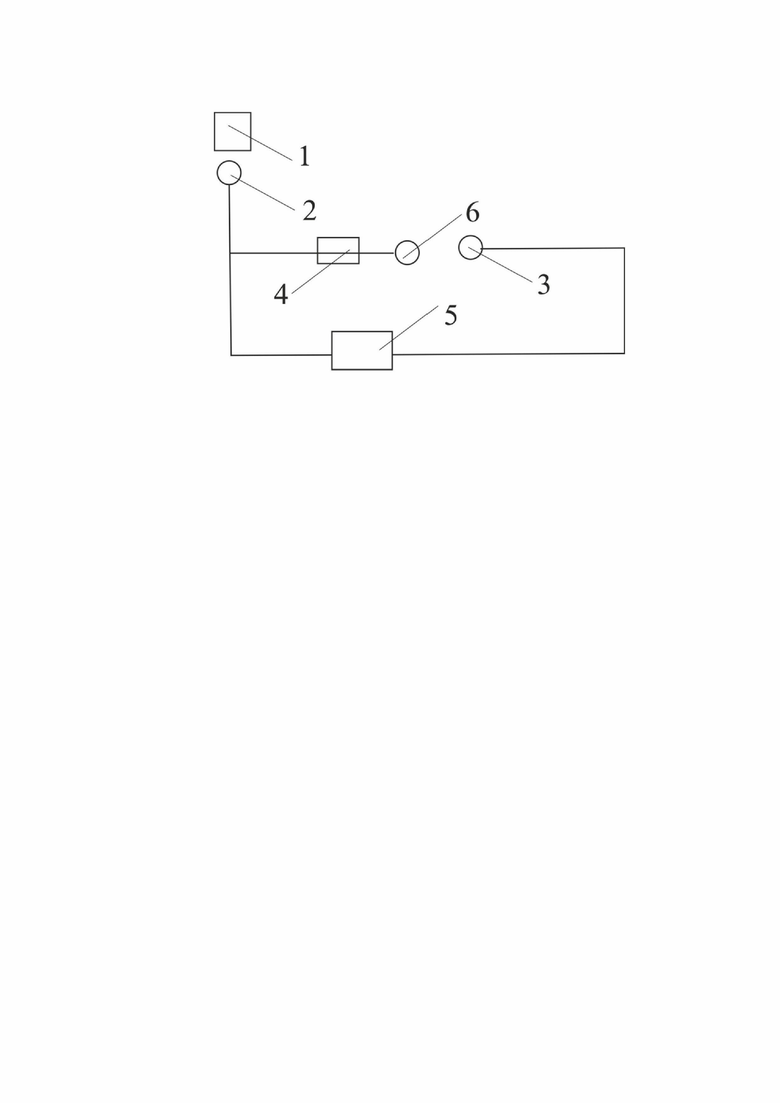
На фиг. 1 изображена схема расположения датчиков и излучателей, блока вычисления параметров устройства компенсирующего воздействия и устройства цифровой обработки сигналов по предлагаемому способу.
Обозначения:
1 – источник компенсируемого шума
2 – опорный датчик
3 – датчиками остаточных вибраций
4 – устройство цифровой обработки сигналов
5 – блок вычисления параметров устройства компенсирующего воздействия
6 – управляемые излучатели
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АКТИВНОГО ГАШЕНИЯ ВИБРАЦИИ | 2014 |
|
RU2572664C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВИБРАЦИИ | 2014 |
|
RU2573170C2 |
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2011 |
|
RU2498258C2 |
| Способ активного гашения магнитного шума электродвигателя и устройство для его осуществления | 2021 |
|
RU2769972C1 |
| Способ контроля спектра случайной вибрации и устройство для его осуществления | 1986 |
|
SU1404864A1 |
| ДИАГНОСТИКА ТЕХНОЛОГИЧЕСКОГО УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ СИГНАЛА ДАТЧИКА ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 2004 |
|
RU2325685C2 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2025042C1 |
| АДАПТИВНЫЙ СПОСОБ АКТИВНОГО ГАШЕНИЯ ШУМА В САЛОНЕ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2763309C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИНТЕЗИРОВАННОГО ВЫХОДНОГО СИГНАЛА ПЕРИОДА ВРЕМЕНИ | 2015 |
|
RU2686526C1 |
| СПЕКТРАЛЬНЫЙ АНАЛИЗ С ИСПОЛЬЗОВАНИЕМ СПЕКТРАЛЬНОЙ ДЕКОНВОЛЮЦИИ | 2014 |
|
RU2665330C2 |
Изобретение относится к виброакустике, в частности к способам активного подавления вибрационных воздействий. Способ активного гашения вибраций, включающий в себя: размещение датчиков остаточных вибраций в местах, требующих гашения вибраций, передачу сигнала с опорных датчиков и сигналов с датчиков остаточных вибраций в блок вычисления параметров устройства компенсирующего воздействия, определение параметров формирующих фильтров компенсирующего сигнала, генерацию компенсирующих сигналов при помощи преобразования формирующими фильтрами сигнала с опорных датчиков. При этом определение параметров формирующих фильтров компенсирующего сигнала осуществляют по ограниченной по времени выборке сигналов с опорных датчиков и датчиков остаточных вибраций, что не требует расчета и постоянной коррекции параметров формирующих фильтров в режиме реального времени, и в качестве вычислительного метода применяют метод наименьших квадратов. Технический результат – уменьшение времени настройки алгоритма определения параметров компенсирующего сигнала при одновременном снижении требований к вычислительной мощности используемого устройства обработки сигналов посредством отказа от высокопроизводительных вычислений в реальном времени. 1 ил. 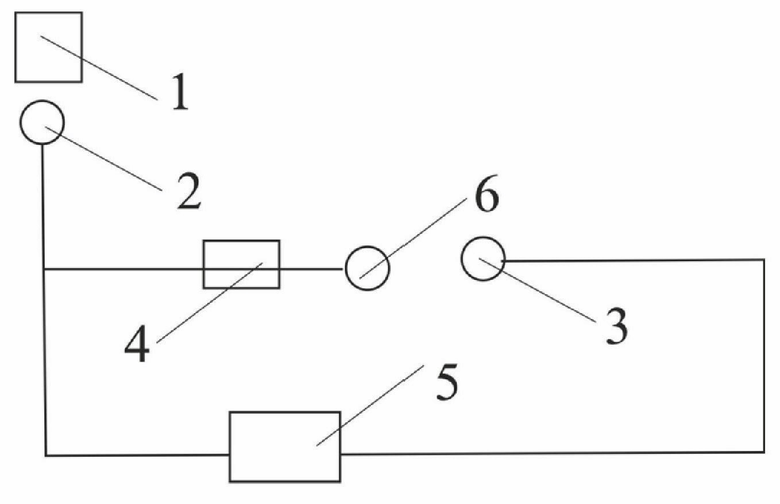
Способ активного гашения вибраций, включающий в себя: размещение датчиков остаточных вибраций в местах, требующих гашения вибраций, передачу сигнала с опорных датчиков и сигналов с датчиков остаточных вибраций в блок вычисления параметров устройства компенсирующего воздействия, определение параметров формирующих фильтров компенсирующего сигнала, генерацию компенсирующих сигналов при помощи преобразования формирующими фильтрами сигнала с опорных датчиков, отличающийся тем, что определение параметров формирующих фильтров компенсирующего сигнала осуществляют по ограниченной по времени выборке сигналов с опорных датчиков и датчиков остаточных вибраций, что не требует расчета и постоянной коррекции параметров формирующих фильтров в режиме реального времени, и в качестве вычислительного метода применяют метод наименьших квадратов.
| WO 9424970, 10.11.1994 | |||
| JPH 10232682 A, 02.09.1998 | |||
| US 2012170764 A1, 05.07.2012 | |||
| Способ очистки бензолсодержащего газа | 1978 |
|
SU712115A1 |
| JP 2017207928 A, 24.11.2017 | |||
| US 7773760 B2, 10.08.2010. | |||
