Изобретение относится к способу снижения магнитного шума и вибрации электродвигателя, питаемого с помощью преобразователя частоты с широтно-импульсной модуляцией. Кроме того, изобретение относится к устройству уменьшения магнитного шума и вибрации, вызванных действием электромагнитных сил на статор электродвигателя, питаемого с помощью преобразователя частоты с широтно-импульсной модуляцией.
В процессе работы электрических машин в их воздушных зазорах возникают электромагнитные силы, имеющие характер вращающихся или пульсирующих силовых волн, распределенных вдоль зазора. Эти силы вызваны магнитным полем в воздушном зазоре электрической машины и включают в себя три основные составляющие: радиальную, тангенциальную и осевую [1-3].
В процессе возбуждения вибрации статора электродвигателя участвует, прежде всего, радиальная составляющая этой силы. В большинстве типов электрических машин колебания этой силы лежат в диапазоне частот 100-4000 Гц, что определяет диапазон магнитной вибрации двигателей в целом [1,4]. Именно она вызывает изгибные деформации статоров. Наиболее опасны эти деформации в двигателях и генераторах большой и средней мощности, характеризующихся большими значениями индукции магнитного поля, где амплитуда вибрации может достигать 0,3-0,5 мм при ширине воздушного зазора 0,6-0,8 мм [3].
Для снижения магнитного шума и вибрации электродвигателей применяется множество способов и средств. Наиболее простыми, эффективными и надежными способами являются конструкционные, состоящие в использовании сердечников с большой спинкой статора, отстройке собственной частоты статора от резонансной на этапе проектирования, применении демпферной обмотки ротора и т.п [1-3].
С развитием систем управления с цифровой обработкой сигналов к конструкционным способам добавились активные метода гашения гармоник, заключающиеся в управляемом изменении спектра питающего тока таким образом, при котором гармоники магнитного поля, вызывающие шум и вибрацию статора электродвигателя, исключаются. Наибольшее распространение получили методы, заключающиеся в добавлении к спектру питающего тока дополнительной компенсационной гармоники [5-6], и методы, заключающиеся в управлении углами фазных напряжений при векторном управлении электродвигателем [2,7].
Известен способ снижения вибрации электродвигателя, управляемого трехфазным напряжением, генерируемым инвертором, на входы которого поступают трапецеидальные управляющие сигналы с положительными и отрицательными полуволнами, что обеспечивает снижение искажения формы питающего напряжения высокочастотными гармониками [8]. Недостатками предложенного способа является возможность использования только применительно к инверторам, управляемых двухполярным сигналом, отсутствие алгоритма, позволяющего определять и подавлять гармоники магнитного поля, вызывающие шум и вибрации двигателя, низкая эффективность в диапазоне частот 100-1000 Гц.
Известно устройство для снижения магнитного шума электродвигателя, состоящее из компараторов, сравнивающих напряжение на фазах с напряжением в общей точке, схему определения положения ротора, вычислительный блок, блок шумоподавления, блок формирования сигнала управления и блок управления транзисторами [9]. Принцип гашения магнитной вибрации заключается в плавном увеличении или уменьшении тока на входе блока формирования сигнала управления с целью управления задающим сигналом ШИМ на его выходе. При явных преимуществах малого количества датчиков данный способ обладает рядом недостатков. Во-первых, предложенное устройство в диапазоне частот 100-2000 Гц (в высокочастотной области магнитный шум подавляется за счет трапецеидальной формы напряжения на выходе инвертора) позволяет осуществлять виброгашение лишь на одной частоте. Во-вторых, контроль вибрации осуществляется на частоте пульсации момента, а не с частотой колебания магнитной силы, вызывающей наиболее интенсивные вибрации, которые в большинстве случаев не совпадают.
Известно устройство для снижения магнитного шума электродвигателя, состоящее из датчика вибрации, подающего сигнал на формирователь электрического сигнала, контроллера, управляющего двигателем посредством цикла управления, обеспечивающего контроль магнитной вибрации [10]. При низком уровне магнитной вибрации управление двигателем осуществляется в одном рабочем цикле, тогда как при повышенном магнитном шуме режим работы меняется в зависимости от интенсивности магнитной вибрации. Таким образом, принцип снижения вибрации достигается переключением нескольких алгоритмов формирования ШИМ. Недостатком способа является отсутствие управляемого снижения гармоник магнитного поля, а выбор наименее «виброактивного» режима формирования ШИМ путем их последовательного переключения.
Известен способ снижения магнитного шума асинхронного двигателя и устройство для его осуществления, встроенное в систему векторного управления электроприводом, включающее в себя датчик тока, блок преобразования Фурье, задатчик амплитуды компенсационной гармоники, координатные преобразователи и контроллер [11]. Таким образом, определение гармоник магнитной вибрации осуществляется исходя из спектрального состава питающего тока. У такого принципа есть ряд недостатков. Во-первых, по спектру тока достаточно сложно определить гармоники вибраций статора ввиду сложной формы реальной АЧХ статора, как механической системы. Во-вторых, в подсистеме, обеспечивающей формирование компенсационного сигнала, отсутствует обратная связь по амплитуде, что может привести к усилению вибрации вместо ее подавления. Устройства и способы снижения магнитного шума двигателей, близкие к [11], описаны в патентах [12,13]
Наиболее близким к предлагаемому изобретению по технической сущности является способ снижения шума двигателя, питаемого с помощью инвертора, заключающийся в изменении магнитного потока таким образом, что произведение магнитного потока основной гармоники поля на высшую гармонику поля уменьшается за счет управления глубины модуляции и/или частоты импульсов инвертора [14]. Способ учитывает влияние нагрузочного момента на форму потребляемого напряжения и подходит для синхронного и асинхронного электродвигателя. Данный способ имеет несколько недостатков. Во-первых, использование вместо акселерометра датчика скорости, установленного на ротор, не позволяет оценить реальный спектр магнитных вибраций, хотя и позволяет избежать влияния вибраций от других источников. Во-вторых, в предложенном способе предлагается управлять частотой инвертора для уменьшения магнитного шума на некоторой частоте, что может привести к существенному усилению магнитного шума на других частотах ввиду существенного изменения спектрального состава питающего напряжения.
Задачей настоящего изобретения является снижения уровней магнитной вибрации синхронных и асинхронных электродвигателей, питаемых от инверторов и преобразователей частоты с ШИМ, с целью повышения их срока службы, а также снижения уровней излучаемого двигателем шума.
Технический результат достигается посредством способа активного снижения ряда гармоник магнитного поля в воздушном зазоре электрической машины, вызывающих наиболее интенсивные вибрации статора, и регулирующего устройства, осуществляющего этот способ, обладающего следующей совокупностью существенных признаков:
устройство включает в себя датчик вибрации, блок быстрого преобразования Фурье, усилитель, компенсатор задержки и формирователь компенсационного сигнала;
использование сигнала с датчика вибрации, установленного на корпус, позволяет по спектру вибраций двигателя определить гармоники магнитного поля в воздушном зазоре машины, вызывающие магнитную вибрацию;
влияние сторонней вибрации и вибрации с частотой вращения двигателя компенсируется использованием полосового фильтра, реализованного в блоке быстрого преобразования Фурье;
амплитуды компенсационных гармоник тока определяются на основании значений токов намагничивания с частотой этих гармоник, средней магнитной индукции в воздушном зазоре и геометрических параметров пакета стали статора;
фазовые сдвиги компенсационных гармоник тока определяются из значений фазовых сдвигов вибраций, действующих с частотой 2(g+1) f0 Гц, задержки, связанной с процессом вычисления спектра и задержки, вызванной механическим импедансом стального пакета статора.
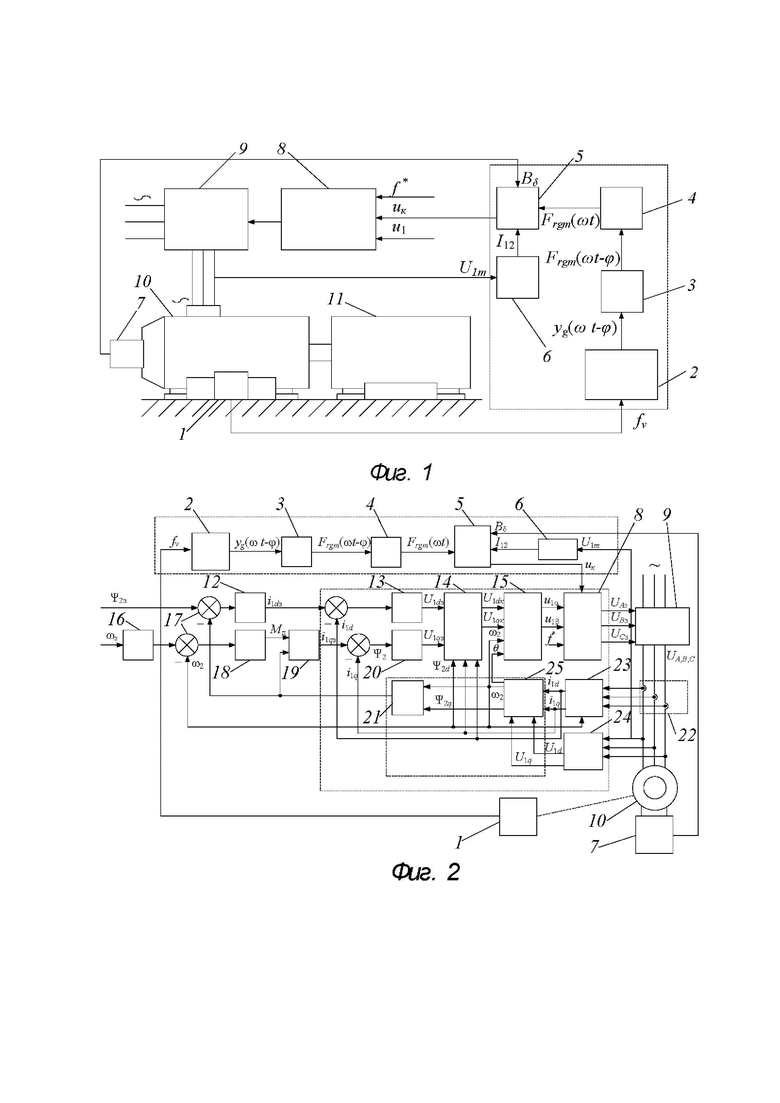
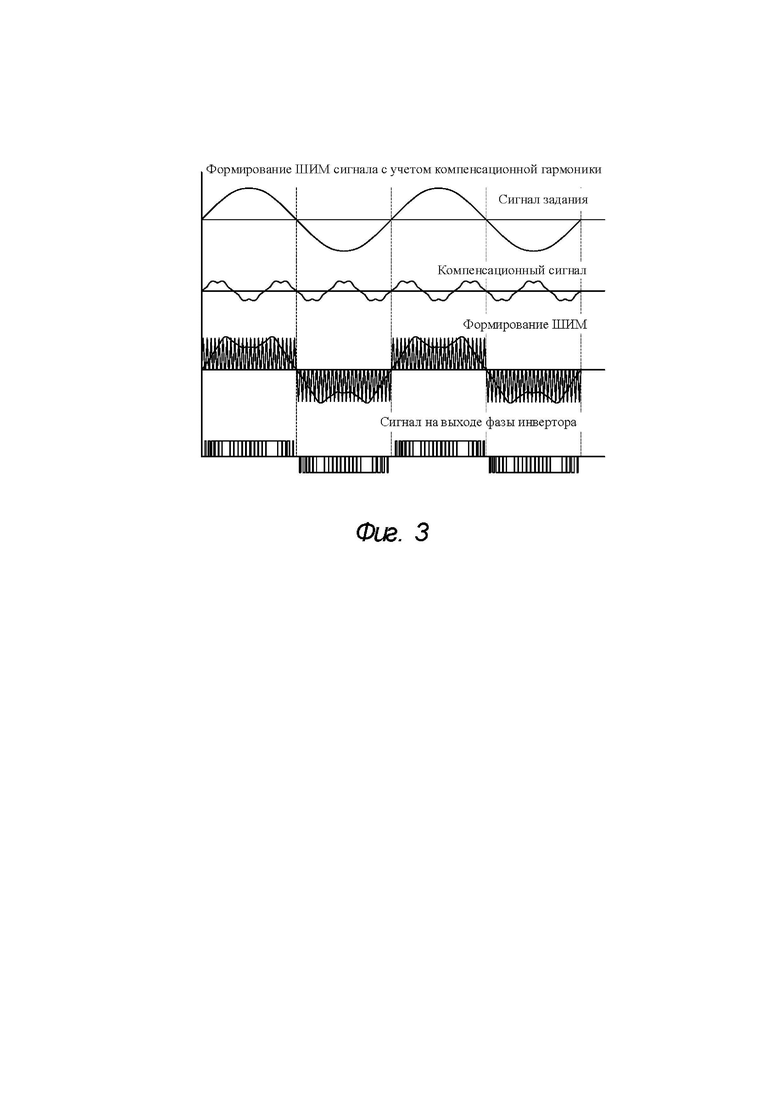
Возможность осуществления изобретения поясняется чертежами. На фиг. 1 представлена схема способа активного снижения магнитной вибрации и шума электродвигателя в виде функциональных блоков. На фиг. 2 приведена эта же схема в составе системы векторного управления электроприводом переменного тока. На фиг. 3 представлен алгоритм формирования ШИМ для одной фазы электродвигателя, питаемого от инвертора, оснащенного устройством, обеспечивающим активное снижение магнитных вибраций.
Устройство активного снижения магнитной вибрации и шума электродвигателя состоит из датчика вибрации (акселерометра) 1, блока быстрого преобразования Фурье (БПФ) 2, оснащенного полосовым фильтром, усилителя 3, компенсатора фазовой задержки 4, формирователя компенсационного сигнала (ФКС) 5, блока расчета тока намагничивания 6 и датчика Холла 7, и представляет собой активный компенсатор гармоник (АКГ). Выходной сигнал с ФКС uк суммируется с сигналом задания u1 в блоке формирования ШИМ (БФ ШИМ) 8, управляющем ключами инвертора (преобразователя частоты) 9, питающего электродвигатель 10 с нагрузкой (исполнительным механизмом) 11.
Устройство может быть использовано в составе системы векторного управления электроприводом переменного тока, канал регулирования потокосцепления которой содержит регулятор потокосцепления (РП) 12, регулятор тока (РТ1) 13, блок коррекции (БК) 14, блок прямого координатного преобразования (КП) 15, канал регулирования скорости содержит задатчик интенсивности (ЗИ) 16, регулятор скорости (РС) 17, блок делителя (БД) 18, а также контур тока. В свою очередь, контур тока состоит из регулятора тока (РТ2) 19, ранее упомянутых БК 14, блока КП 15 и БФ ШИМ 8, датчика тока на эффекте Холла 20, блоков обратного координатного преобразования (ПК1, ПК2) 21 и 22, блока наблюдателя состояния электродвигателя (БН ЭД) 23 и вектор-фильтра (ВФ) 24.
Изобретение основано на понимании того, что радиальная электромагнитная сила fr(x,t) представляет собой распределенную нагрузку, действующую на единицу площади внутренней поверхности ярма статора, и пропорциональна квадрату магнитной индукции в воздушном зазоре Bδ [1,2,4]:

где x - угловая координата, t - время, μ0 - магнитная проницаемость вакуума.
Известно, что наиболее интенсивные магнитные вибрации вызывают высшие зубцовые гармоники магнитного поля при их взаимодействии с вращающимся магнитным полем, а также гармоники, порождаемые искажением формы питающего тока. Такое взаимодействие порождает четыре составляющие электромагнитной силы, наиболее опасной из которых является гармоника следующего вида [2]:
где Bmg - амплитуда g-й гармоники магнитного поля, Bm1 - амплитуда 1-й гармоники магнитного поля, Zp - число пар полюсов, ω1 - частота магнитного поля в зазоре, ωg - частота взаимодействующей g-й гармоники магнитного поля, ϕ1 - фаза 1-й гармоники магнитного поля, ϕg - фаза g-й гармоники магнитного поля.
Пространственный порядок этой гармоники равен r = 2 Zp. Таким образом, порожденная гармоника вызывает радиальную деформацию стали статора формы правильного r-угольника (либо эллипса при Zp = 1). Частота колебаний стали статора с таким пространственным порядком равна [1]:
где E - модуль упругости стали статора, h - высота спинки статора, Rст - внешний радиус статора, m - приведенная масса стали статора, которая может быть определена как [1]:
где lt - длина (высота) сердечника статора, mст - масса стали статора.
Известно, что электромагнитные силы одного спектрального состава вызывают вибрации стального сердечника статора другого спектрального состава. Данное явление обусловлено тем, что, будучи колебательной механической системой, статор обладает своей амплитудно-частотной характеристикой, которой присуще наличие нескольких собственных частот, соответствующих нескольким формам колебаний. В рамках вибродиагностики обычно эти колебания рассматриваются в единицах измерения скорости. Выражение для определения виброскорости статора, вызванной магнитной вибрацией, имеет следующий вид:
где frgm - амплитуда g-й гармоники электромагнитной силы, действующей на статор, R - радиус расточки статора, zω - механический импеданс статора.
Механический импеданс zω статора на частоте действия электромагнитной силы ω находится по известному выражению [1]:

где λст - механическая податливость стального сердечника статора.
Амплитуда каждой гармоники радиальной электромагнитной силы может быть найдена согласно выражению:
где I12g и ϕ12g - амплитуда и фазовый сдвиг g-й гармоники тока намагничивания, I12 и ϕ12 - амплитуда и фазовый сдвиг 1-й гармоники тока намагничивания согласно Т-образной схеме замещения.
Подавлять гармонику магнитного поля в воздушном зазоре электродвигателя предлагается путем добавления к спектру питающего тока дополнительной компенсационной гармоники, генерирующей волны магнитной индукции в противофазе вибровозмущающей гармоники магнитного поля. Таким образом, будут подавлены и волны вибровозмущающей силы, порожденные взаимодействием этой гармоники с основной гармоникой вращающегося магнитного поля.
Введение дополнительной гармоники может быть осуществлено путем изменения алгоритма формирования ШИМ посредством изменения формы задающего сигнала, уровень которого определяет ширину импульсов на выходе инвертора. Таким образом, изменяя спектральный состав тока на выходе инвертора, можно подавить наиболее опасные с точки зрения возбуждаемых ими вибраций статора гармоники магнитного поля.
Компенсационная гармоника (или набор гармоник) генерируются посредством специального регулирующего устройства - активного компенсатора гармоник (АКГ), включающего в себя датчик вибрации (акселерометр) (ДВ) 1, блок быстрого преобразования Фурье (БПФ) 2, полосовой фильтр, усилитель 3, компенсатор фазовой задержки 4, формирователь компенсационного сигнала (ФКС) 5, блок расчета тока намагничивания 6 и датчик Холла (ДХ) 7.
ДВ 1 устанавливается на корпус электродвигателя 10 и предназначается для выработки сигнала, пропорционального виброускорению статора, подверженного магнитной вибрации. В большинстве конструкций статоров пакет стали статора плотно прилегает к корпусу двигателя (ЭД) и спектр вибраций в процессе передачи колебаний от статора к корпусу изменяется незначительно. Во избежание снижения основной гармоники магнитного поля статора и учета других источников вибрации двигателя на входе БПФ 2 предусмотрен полосовой фильтр, обеспечивающий отсекание гармоник вибрации в диапазоне частот 10-150 Гц, вызванных эксцентриситетом ротора, дефектами подшипников, а также гармоники частотой выше 2000-3000 Гц, амплитуда которых незначительна.
В БПФ 2 происходит вычисление спектра виброускорений статора с целью выявления в нем наиболее интенсивных гармоник и очистки сигнала от лишнего шума. Впоследствии сигнал виброускорений преобразуется в сигнал виброскорости, которая находится в прямо пропорциональной связи с амплитудой электромагнитной силы, действующей на статор ЭД. Электромагнитная сила определяется отдельно для каждой гармоники в зависимости от количества входов/выходов усилителя 3, предусмотренных при реализации устройства.
Важным этапом формирования компенсационной гармоники является определение ее фазового сдвига, что усугубляется дополнительным временным сдвигом, вызванным механическим импедансом статора, вычислительными процессами АКГ, преобразованием виброускорения в виброскорость, а также сдвигом при переходе от волн магнитной индукции к волнам электромагнитной силы. На практике начальная фаза тока намагничивания составляет ≈ 0°, и последней составляющей задержки можно пренебречь. Преобразование ускорение в скорость вызвало сдвиг каждой гармоники колебаний на 90° назад, для чего компенсатор фазовой задержки 4 должен сдвинуть сигнал на 90° вперед. Фазовая задержка, связанная с вычислительными процессами АКГ, вызвана, главным образом, расчетами в блоке БПФ и равна:
T = k⋅lg(k),
где T - период дискретизации, k - количество интервалов, на которые разбивается входной сигнал времени.
Величина фазовой задержки g-й гармоники, вызванной инерционностью процесса деформации статора, зависит от его механических свойств:
где Cст = 1/ λст - приведенная жесткость статора.
Таким образом, зная форму колебаний магнитного поля в зазоре и механические параметры статора АД, можно определить компенсационную составляющую радиальной магнитной силы с учетом фазового сдвига:

На основании сигнала или нескольких сигналов с выхода компенсатора фазовой задержки 4 блоком формирования компенсационного сигнала (ФКС) 5 вырабатывается задание компенсационного напряжения uк, которое вместе с основным заданием напряжения u1 поступает на вход БФ ШИМ 8. Амплитуда компенсационного сигнала определяется из значения тока согласно следующему отношению:
 .
.
Для проведения данного расчета необходимо определить значение тока намагничивания I12, для чего используется блок расчета тока намагничивания 6. Расчет тока намагничивания осуществляется исходя из параметров Т-образной схемы замещения ЭД по значению одного из фазных напряжений. Для определения магнитного поля в воздушном зазоре рекомендуется использовать бесконтактный ДХ 7, однако, поскольку в процессе работы ЭД 10 магнитное поле не изменяется в широких пределах, данное значение может быть принято постоянной величиной.
Кроме того для определения частоты гармоники магнитного поля, вызывающей наиболее интенсивные вибрации статора, в блоке ФКС 5 используется цифровой преобразователь частоты. Частота каждой гармоники входного сигнала должна быть увеличена в g/(2g+2) раз.
В БФ ШИМ 8 сигналы uк и u1 суммируются, и ШИМ производится по полигармоническому задающему сигналу, что существенно видоизменяет спектральный состав выходного напряжения, формируемого ключами инвертора 9. На фиг. 3 показан пример такого сигнала на выходе одной фазы инвертора. На самом деле выходной сигнал инвертора 9 может отличаться в зависимости от его типа, а также типа используемой ШИМ 8. Сформированное таким образом напряжение, учитывающее дополнительные введенные гармоники, поступает на вход статорной обмотки электродвигателя 10. Задача этих гармоник - вызвать гармоники магнитной индукции в воздушном зазоре ЭД 10 в противофазе другим гармоникам поля, вызывающим наиболее сильные вибрации статора, с целью их подавления.
Чаще всего ЭД 10 работает в условиях нагрузки 11, приведенной к валу и близкой к номинальной. Изменение нагрузки может привести к существенным изменениям токов инвертора 9, токов, потребляемых ЭД 10, и магнитного потока в воздушном зазоре ЭД 10. Настоящее изобретение позволяет контролировать токи на выходе инвертора и магнитное поле в зазоре ЭД 10, при этом не увеличивая дополнительно магнитный поток. Таким образом, способ может быть использован в системах регулируемого электропривода.
Пример системы регулируемого электропривода переменного тока с векторным управлением, оснащенной устройством АКГ согласно настоящему изобретению, представлен на фиг. 2. Канал регулирования потокосцепления Ψ2 содержит обратную связь по потокосцеплению, сигнал которой формируется посредством датчиков тока и напряжения, измеряющих эти параметры в системе координат ABC, впоследствии преобразуемых в dq с помощью блоков ПК1 21 и ПК2 22. БН ЭД 23 вычисляет значения Ψd и Ψq, которые поступают в блок ВФ 24, а полученный сигнал Ψ2 поступает в качестве сигнала обратной связи на РП 12 и поступает на вход делителя БД 18 в канале регулирования скорости РС 17.
Канал потокосцепления включает внутренний контур тока I1d, содержащий ПИ-регулятор РТ1 13 и обратную связь по току I1d. Этот ток вычисляется по фазным значениям токов статора, снимаемым посредством ДТ 20, в блоке ПК1 21. Выходом регулятора РТ1 13 является задание напряжения U1d, к которому прибавляется компенсационный сигнал канала РС, обеспечивающий независимость контуров скорости и потокосцепления. Полученный в БК 14 сигнал задания напряжения преобразуется в прямом координатном преобразователе КП 15, выполняющем прямое преобразование Парка-Горева, и БФ ШИМ 8 в заданные значения амплитуды и фазы напряжений на выходе инвертора 9. Контур регулирования потокосцепления ротора Ψ2 ЭД 10 обеспечивает поддержание постоянства потокосцепления в каждом из рабочих режимов работы электропривода на уровне заданного значения Ψ2з.
Второй канал предназначен для регулирования момента ЭД 10 с целью поддержания скорости на одном уровне. Он содержит внешний контур скорости и подчиненный ему внутренний контур тока I1q. Задание на скорость поступает от ЗИ 16, определяющего ускорение и требуемое значение скорости. Обратная связь по скорости реализуется посредством адаптивного оценивания в блоке БН ЭД 23.
Регулятор скорости (РС) 17 является пропорционально интегральным звеном. Выходом РС 17 является задание на величину момента, развиваемого ЭД 10. Величину задания тока i1q можно получить путем деления сигнала задания на момент Mз на сигнал о потокосцеплении ротора Ψ2, который и подается на вход регулятора тока РТ2 19. В блоке БФ ШИМ 8 формируется задание питающего напряжения по фазам UA, UB и UC, форма которых и определяет в конечном итоге характер волн магнитного поля в зазоре ЭД, а, следовательно, излучаемый им шум и вибрацию.
Из фиг. 2 и принципа действия АКГ следует, что устройство может использовать те же датчики, что и система векторного управления электроприводом, за исключением датчика вибрации. Канал АКГ выступает в качестве дополнения к системе управления, внося лишь незначительные изменения в спектральный состав выходного сигнала инвертора, главным образом, в диапазоне 200-2000 Гц.
Литература.
1. Шубов, И.Г. Шум и вибрация электрических машин / И.Г. Шубов. - Л.: Энергоатомиздат, 1986. - 208 с.
2. Доброскок, Н.С. Алгоритмические методы снижения шумов и вибраций в частотно-регулируемом асинхронном электроприводе: дисс… канд.техн.наук. СПб., 2014. 162 с.
3. Maliti K. C. Modelling and analysis of magnetic noise in squirrel-cage induction motors: doctoral dissertation / K. C. Maliti. - Stockholm., 2000. - 209 p.
4. Кучер, В.Я. Вибрация и шум электрических машин: письменные лекции. - СПб.: СЗТУ, 2004, - 55 с.
5. Belkhayat, D. Active reduction of magnetic noise in asynchronous machine controlled by stator current harmonics / D. Belkhayat, D. Roger, J. F. Brudny // Electrical Machines and Drives, 1997 Eighth International Conference on. - 1997. - pp. 400-405.
6. Cassoret B. Magnetic noise reduction of induction machines / B. Cassoret, R. Corton, D. Roger, J-F. Brudny // Power Electronics, vol. 18 (2). - 2003. - pp. 570-579.
7. Franck D. Active reduction of audible noise exciting radial force-density waves in induction motors / D. Franck, M. van der Giet, K. Hameyer // Electric Machines & Drives Conference (IEMDC), 2011 IEEE International. - 2011. - pp. 1213-1218.
8. Патент № 2234184 Российская Федерация, МПК H02P5/175, H02P7/29, H02P7/42, H02M7/48. Способ снижения вибрации электродвигателя: № 2002132081/09 : заявл. 29.11.2002 : опубл. 10.08.2004 / Деревянченко А.Е., Яхинсон М.Б., Яцук В.Г.; заявители Деревянченко А.Е., Яхинсон М.Б., Яцук В.Г. (RU). - 10 с
9. Патент № 6724166 Соединенные Штаты Америки, МПК H02P7/638, H01R39/46. Apparatus for reducing motor driving noise and method for generating motor driving noise reducing signal: № US2003/0020426 : заявл. 30.01.2003 : опубл. 20.04.2004 / Satoshi Narumi, Hiroyuki Tamagawa, Masaharu Hoashi; заявитель NEC Electronics Corp., Renesas Electronics Corp. (JP). - 27 c
10. Патент № 6291960 Соединенные Штаты Америки, МПК G05B11/28. Pulse width modulated motor control system and method for reducing noise vibration and harshness: № US09/533,296 : заявл. 22.03.2000 : опубл. 18.09.2001 / Crombez D.S.; заявитель Ford Motor Co., Continental Automotive Systems Inc. (US). - 7 с
11. Патент № 1553693 Европа, МПК H02P9/10, H02J3/01, H02K19/36, H02M1/14, G10K11/178 (2006.01). AС rotary electric machine magnetic noise reduction method, motor control device and ac rotary electric machine using the same: № PCT/JP2003/013303: заявл. 17.10.2003 : опубл. 19.12.2007 / Soichi Yoshinaga, Kenichi Wakabayashi, Takatoshi Takai, Tatsuru Morioka, Hiroya Tsuji, Makoto Okamura, Shinobu Yamakawa ; заявитель Denso Corp (JP). - 76 с
12. Патент № 06315259 Япония. PWM harmonic noise reducing device: № JP5101177A: заявл. 27.04.1933 : опубл. 08.11.1994 / Yuichi Takeuchi, Norihito Tokura; заявитель Nippondenso Co. Ltd (JP). - 10 с
13. Патент № 2012146248 Всемирная организация интеллектуальной собственности, МПК H02P25/02, H02P29/00 (2006.01). Harmonic noise reduction: № PCT/DK20 12/000052: заявл. 29.04.2011 : опубл. 01.11.2012 / Romanesko C.J.; заявитель Danfoss Drives A/S (DK). - 3 c
14. Патент № 2667079 Российская Федерация, МПК H02P21/05, H02M1/12, H02P21/12, H02P27/08, H02P29/50 (2006.01). Способ снижения шума электродвигателя: № 2017129109: заявл. 09.02.2016 : опубл. 14.09.2018 / Келленшпергер П., Тсоумас И.; заявитель «Сименс Акциенгезелльшафт (DE). - 16 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
Изобретение относится к области электротехники и может быть использовано в электродвигателях, питаемых с помощью инвертора. Техническим результатом является уменьшение вибрации и шума электродвигателя. Снижения шума и вибрации двигателя, питаемого с помощью инвертора, достигается путем уменьшения гармоник электромагнитной силы, порожденных взаимодействием высших гармоник с основной гармоникой вращающегося магнитного поля в воздушном зазоре двигателя, для чего к основному сигналу задания в блоке формирования ШИМ добавляется дополнительный компенсационный сигнал. Устройство, осуществляющее подавление шума, включает датчик вибрации, блок быстрого преобразования Фурье с полосовым фильтром, усилитель, компенсатор фазового сдвига, формирователь компенсационного сигнала, блок расчета тока намагничивания и датчик Холла. 3 н.п. ф-лы, 3 ил.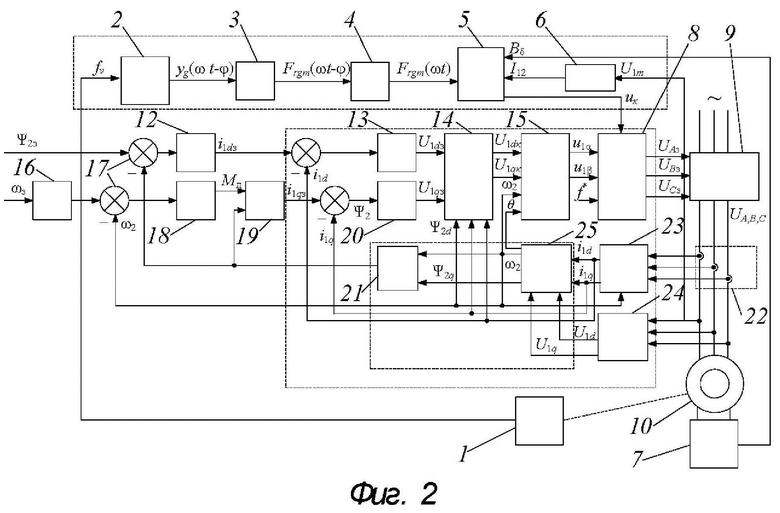
1. Способ снижения шума и вибрации электродвигателя, питаемого с помощью инвертора, согласно которому магнитную индукцию в зазоре электродвигателя изменяют таким образом, что произведение основного колебания магнитного поля на высшую гармонику магнитного поля уменьшается, отличающийся тем, что для изменения гармонического состава к сигналу задания ШИМ добавляется набор компенсационных гармоник, тем самым изменяя спектральный состав выходного напряжения инвертора, компенсационные гармоники определяются на основании анализа спектра излучаемой двигателем вибрации.
2. Устройство регулирования для снижения шума и вибрации двигателя, осуществляющего способ согласно п. 1, отличающееся тем, что устройство состоит из акселерометра, регистрирующего вибрацию статора, блока быстрого преобразования Фурье с полосовым фильтром для очистки вибросигнала от шума и вибраций от сторонних источников, усилителя и компенсатора фазовой задержки для синхронизации целевого сигнала с волнами магнитной индукции в зазоре двигателя, формирователя компенсационного сигнала, осуществляющего преобразование частоты и усиление амплитуды в зависимости от индукции магнитного поля в зазоре двигателя, измеряемой датчиком Холла, и величины тока намагничивания, определяемой блоком расчета тока намагничивания; компенсационный сигнал, формируемый устройством, поступает на вход блока формирования ШИМ, где суммируется с основным сигналом задания, изменяя таким образом спектральный состав напряжения на выходе инвертора, в котором компенсационный сигнал состоит из ограниченного числа гармоник, предпочтительно от двух до четырех, обработка каждой из которых происходит по отдельности параллельно в блоках усилителя, компенсатора фазовой задержки и формирователя компенсационного сигнала.
3. Система привода, содержащая устройство по п. 2, инвертор, двигатель, нагрузку и систему векторного управления, отличающаяся тем, что двигатель посредством инвертора соединен с сетью электроснабжения, причем устройство соединено с инвертором через блок формирования ШИМ, что дает возможность изменять спектральный состав питающего напряжения двигателя, при этом устройство соединено с корпусом двигателя посредством акселерометра, с воздушным зазором двигателя посредством датчика Холла для определения магнитного поля, а также с вольтметром системы векторного управления для определения тока намагничивания двигателя.
| СПОСОБ СНИЖЕНИЯ ВИБРАЦИИ ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2234184C1 |
| СПОСОБ СНИЖЕНИЯ ШУМА ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2667079C1 |
| US 6724166 B2, 20.04.2004 | |||
| US 6291960 B1, 18.09.2001 | |||
| Способ сооружения опускной крепи в тиксотропной рубашке | 1988 |
|
SU1553693A1 |

