Область техники, к которой относится изобретение
Варианты осуществления, описанные ниже, относятся к вибрационным датчикам и более конкретно к формированию синтезированного выходного сигнала периода времени для компенсации ошибок, вызванных шумом процесса, который может возникать при существующих измерениях плотности.
Уровень техники
Вибрационные датчики, такие как вибрационные денситометры и вибрационные вискозиметры, работают путем обнаружения движения вибрирующего элемента, который вибрирует в присутствии текучей среды, которую нужно охарактеризовать. Вибрационный элемент имеет отклик вибрации, который может иметь параметр отклика вибрации, такой как резонансная частота или добротность Q. На отклик вибрации вибрирующего элемента обычно влияют комбинированные характеристики массы, жесткости и демпфирования вибрирующего элемента в комбинации с текучей средой. Свойства, связанные с текучей средой, такие как плотность, вязкость, температура и т. п., могут быть определены путем обработки сигнала или сигналов вибрации, принятых от одного или более преобразователей движения, связанных с вибрирующим элементом. Обработка сигнала вибрации может включать в себя определение параметра отклика вибрации.
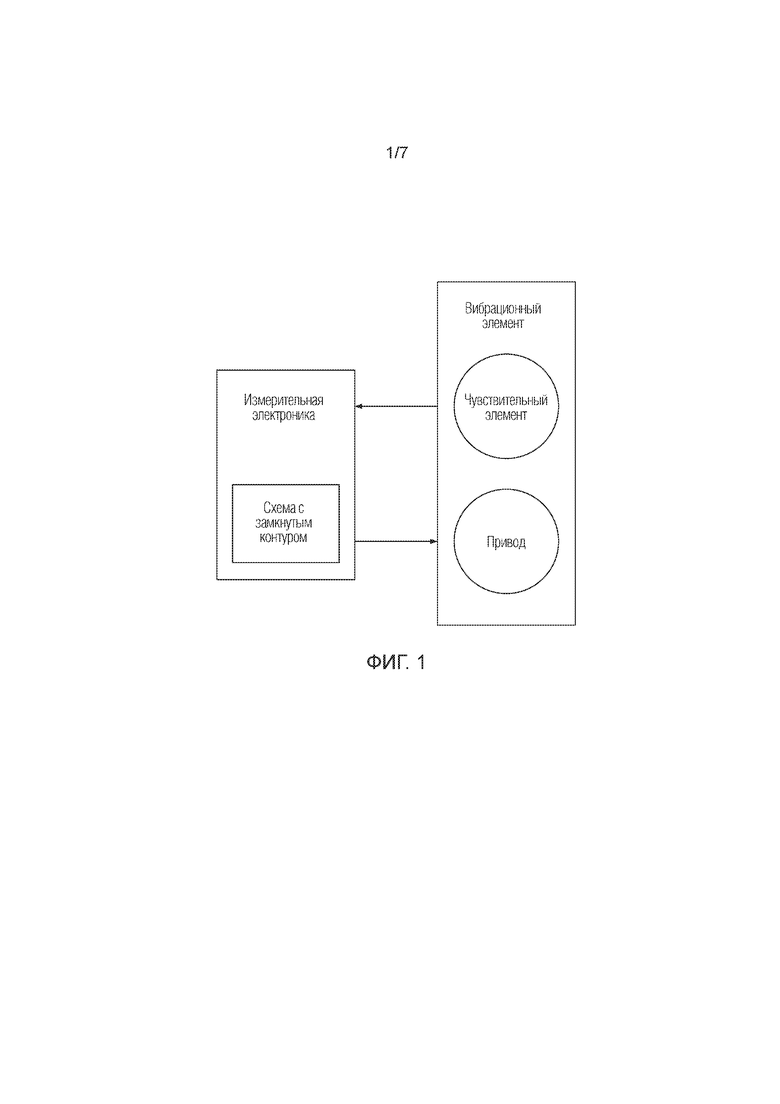
Фиг.1 показывает вибрационный датчик из уровня техники, содержащий вибрационный элемент и измерительную электронику, соединенную с вибрационным элементом. Вибрационный датчик из уровня техники включает в себя привод для вибрации вибрационного элемента и чувствительный элемент, который создает сигнал вибрации в ответ на вибрацию. Сигнал вибрации обычно представляет собой непрерывный или аналоговый сигнал. Измерительная электроника принимает сигнал вибрации и обрабатывает сигнал вибрации для формирования одной или более характеристик текучей среды или измерений текучей среды. Измерительная электроника определяет как частоту, так и амплитуду сигнала вибрации. Частота и амплитуда сигнала вибрации могут быть дополнительно обработаны для определения плотности текучей среды.
Вибрационный датчик из уровня техники обеспечивает сигнал возбуждения для привода, используя схему с замкнутым контуром. Сигнал возбуждения обычно основан на принятом сигнале вибрации. Схема с замкнутым контуром из уровня техники модифицирует или встраивает сигнал вибрации или параметры сигнала вибрации в сигнал возбуждения. Например, сигнал возбуждения может быть усиленной, модулированной или иным образом модифицированной версией принятого сигнала вибрации. Принятый сигнал вибрации может, таким образом, содержать обратную связь, которая позволяет схеме с замкнутым контуром достигать целевой частоты. Используя обратную связь, схема с замкнутым контуром постепенно изменяет частоту возбуждения и контролирует сигнал вибрации до достижения целевой частоты.
Свойства текучей среды, такие как вязкость и плотность текучей среды, могут быть определены из частот, при которых разность фаз между сигналом возбуждения и сигналом вибрации составляет 135° и 45°. Эти желаемые разности фаз, обозначаемые как первая нерезонансная разность φ1 фаз и вторая нерезонансная разность φ2 фаз, могут соответствовать частотам половинной мощности или 3-дБ. Первая нерезонансная частота ω1 определяется как частота, при которой первая нерезонансная разность φ1 фаз составляет 135°. Вторая нерезонансная частота ω2 определяется как частота, при которой вторая нерезонансная разность φ2 фаз составляет 45°. Измерения плотности, выполненные на второй нерезонансной частоте ω2, могут быть независимы от вязкости текучей среды. Соответственно, измерения плотности, выполненные в тех случаях, когда вторая нерезонансная разность φ2 фаз составляет 45°, могут быть более точными, чем измерения плотности, выполненные при других разностях фаз.
Первая и вторая нерезонансные разности φ1, φ2 фаз обычно не известны до измерения. Соответственно, схема с замкнутым контуром должна постепенно приближаться к первой и второй нерезонансным разностям φ1, φ2 фаз, используя обратную связь, как описано выше. Постепенное приближение, связанной со схемой с замкнутым контуром, может вызвать задержку в определении параметра отклика вибрации и, следовательно, вызвать задержку в определении вязкости, плотности или других свойств текучей среды. Задержки при определении таких измерений могут быть чрезмерно дорогими во многих применениях вибрационного датчика.
Соответственно, существует потребность в управлении вибрацией вибрационного датчика на основе фазовой ошибки. Также существует потребность в достижении первой и второй нерезонансных разностей φ1, φ2 фаз без задержек, связанных со схемой с замкнутым контуром.
Раскрытие изобретения
Настоящая заявка предназначена для улучшения точности вибрационных расходомеров путем компенсации ошибки, вызванной шумом процесса.
Предусмотрен способ управления вибрацией вибрационного элемента на основе фазовой ошибки. В соответствии с вариантом осуществления способ содержит: вибрацию вибрационного элемента сигналом возбуждения, прием сигнала вибрации от вибрационного элемента, фильтрацию сигнала, подачу синтезированного отфильтрованного сигнала в выходную схему; формирование выходного сигнала TPSig и измерение разности фаз между сигналом возбуждения и сигналом вибрации. Способ также содержит определение фазовой ошибки между целевой разностью фаз и измеренной разностью фаз и вычисление одного или более элементов управления вибрацией с определенной фазовой ошибкой.
Предусмотрен способ использования измерительной электроники для управления вибрацией вибрационного элемента. В соответствии с вариантом осуществления измерительная электроника, используемая для управления вибрацией вибрационного элемента, содержит: схему привода, соединенную с вибрационным элементом, причём схема привода выполнена с возможностью подачи сигнала возбуждения на вибрационный элемент. Измерительная электроника также содержит схему приемника, соединенную с вибрационным элементом, причём схема приемника выполнена с возможностью приема сигнала вибрации от вибрационного элемента. Измерительная электроника выполнена с возможностью измерения разности фаз между сигналом возбуждения и сигналом вибрации, определения фазовой ошибки между целевой разностью фаз и измеренной разностью фаз и вычисления одного или более элементов управления вибрацией с определенной фазовой ошибкой.
Аспекты изобретения
В одном аспекте изобретения способ формирования сигнала для компенсации ошибок, вызванных шумом процесса при измерениях плотности, содержит этапы, на которых:
принимают сигнал от измерителя; фильтруют сигнал; синтезируют отфильтрованный сигнал; вводят синтезированного отфильтрованного сигнала в выходную схему; и формируют выходной сигнал TPSig.
Предпочтительно измеритель представляет собой вилочный датчик плотности.
Предпочтительно фильтрация также включает в себя этап, на котором усиливают сигнал.
Предпочтительно фильтрация использует аналоговую схему.
Предпочтительно выходная схема представляет собой схему TPSig.
Предпочтительно схема TPSig обеспечивает прямоугольный сигнал.
Предпочтительно прямоугольный сигнал является полностью синтезированным.
Предпочтительно сигнал от датчика является аналоговым сигналом чувствительного элемента.
В другом аспекте изобретения способ формирования синтезированного выходного сигнала периода времени содержит этапы, на которых:
принимают сигнал чувствительного элемента от измерителя вилочного датчика плотности; фильтруют сигнал чувствительного элемента; синтезируют отфильтрованный аналоговый сигнал чувствительного элемента для создания сигнала возбуждения; и вводят сигнала возбуждения для формирования выходного сигнала TPSig.
Предпочтительно фильтрация также включает в себя этап, на котором усиливают сигнал.
Предпочтительно фильтрация использует аналоговую схему.
Предпочтительно выходная схема представляет собой схему TPSig.
Предпочтительно схема TPSig обеспечивает прямоугольный сигнал.
Предпочтительно прямоугольный сигнал является полностью синтезированным.
Предпочтительно сигнал от датчика является аналоговым сигналом чувствительного элемента.
Краткое описание чертежей
Одна и та же ссылочная позиция представляет один и тот же элемент на всех чертежах. Следует понимать, что чертежи не обязательно выполнены в масштабе.
фиг.1 показывает вибрационный датчик из уровня техники, содержащий вибрационный элемент и измерительную электронику, соединенную с вибрационным элементом.
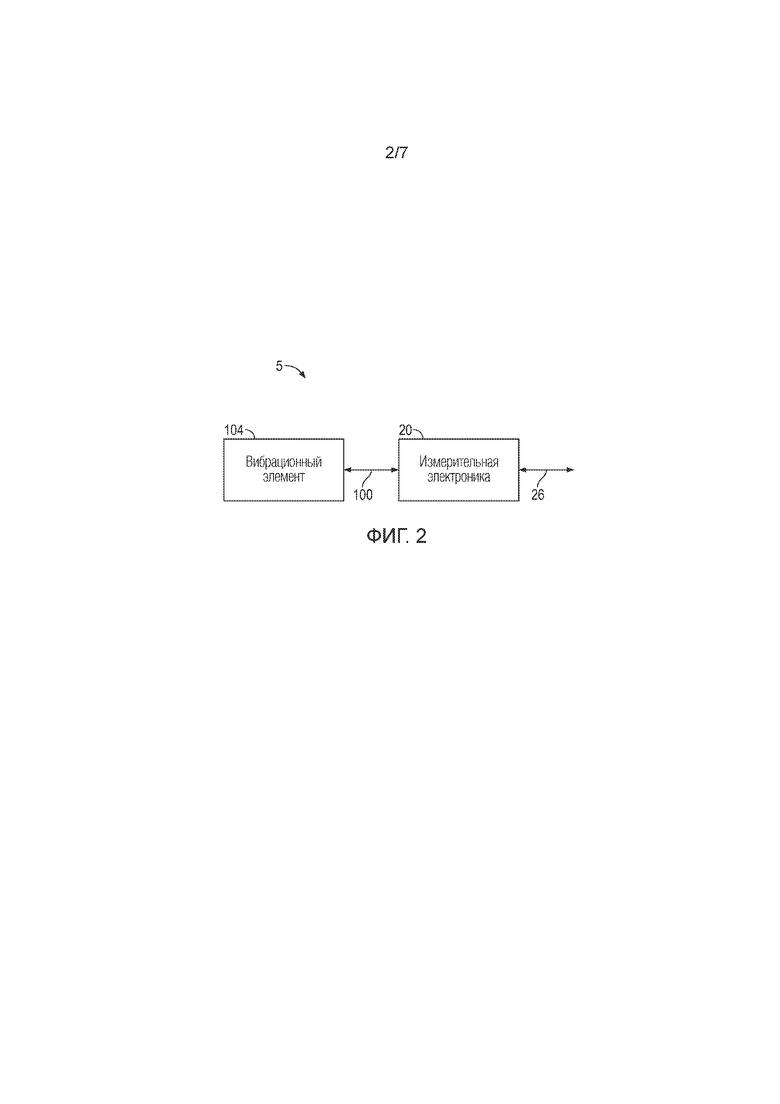
фиг.2 показывает вибрационный датчик в соответствии с вариантом осуществления.
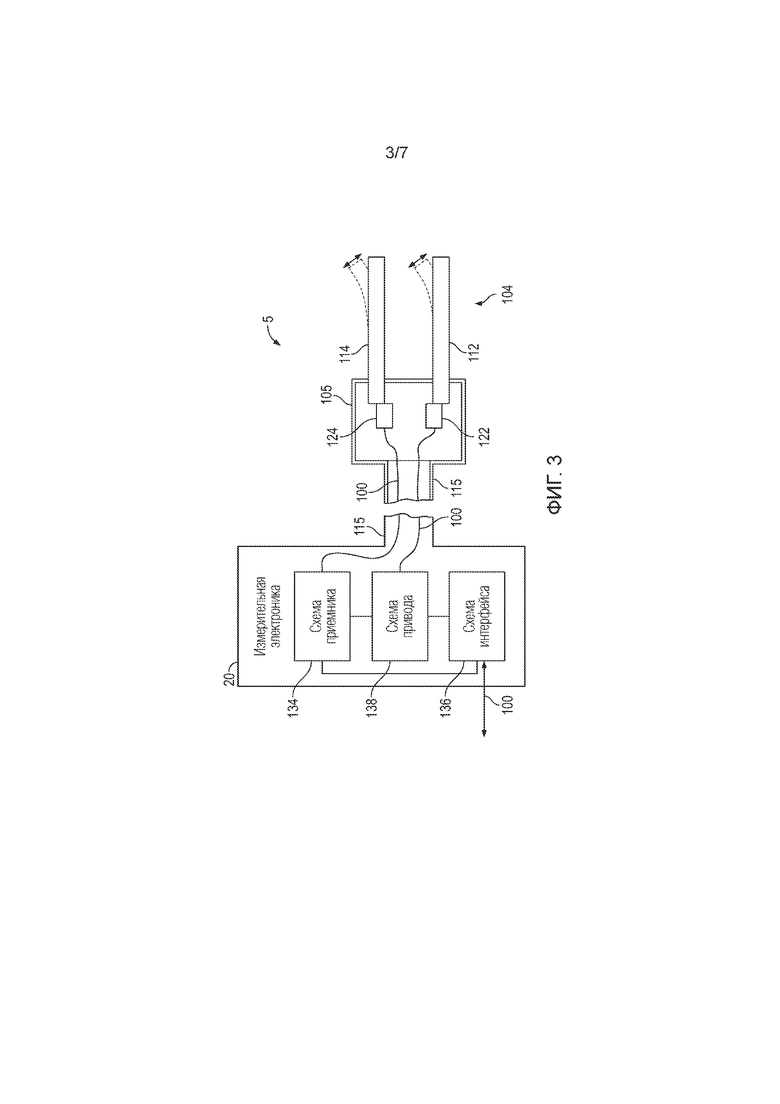
фиг.3 показывает вибрационный датчик в соответствии с вариантом осуществления.
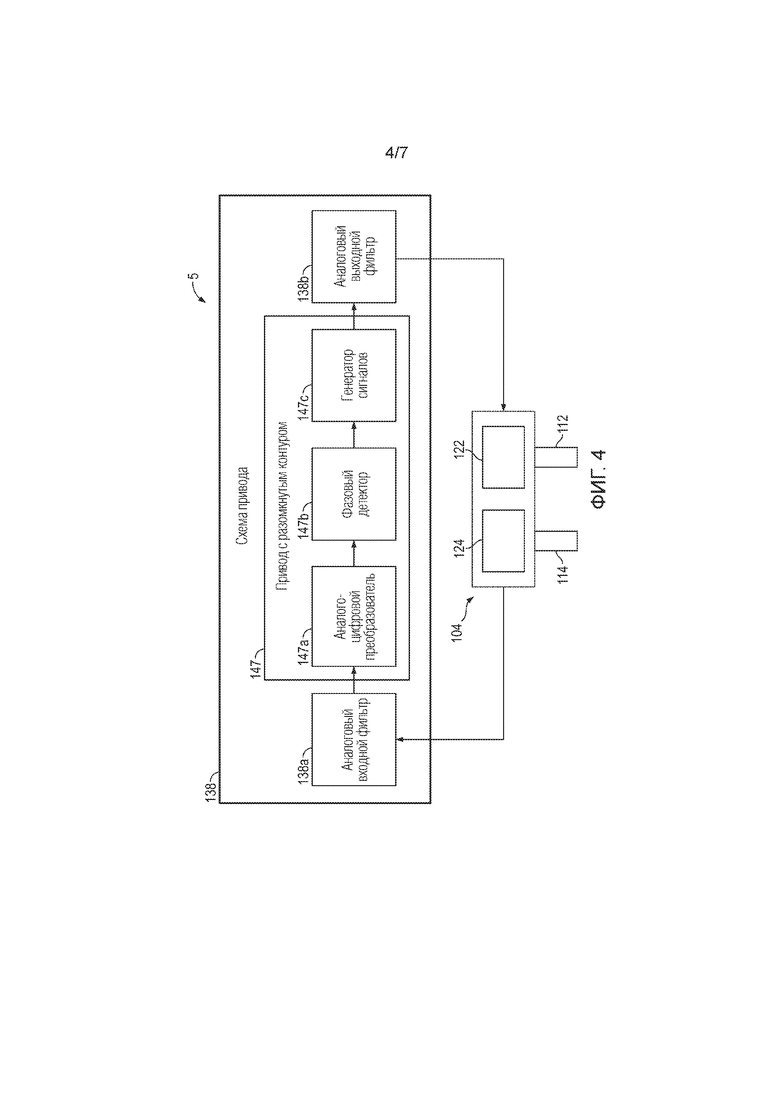
фиг.4 показывает блок-схему вибрационного датчика с более подробным представлением схемы привода.
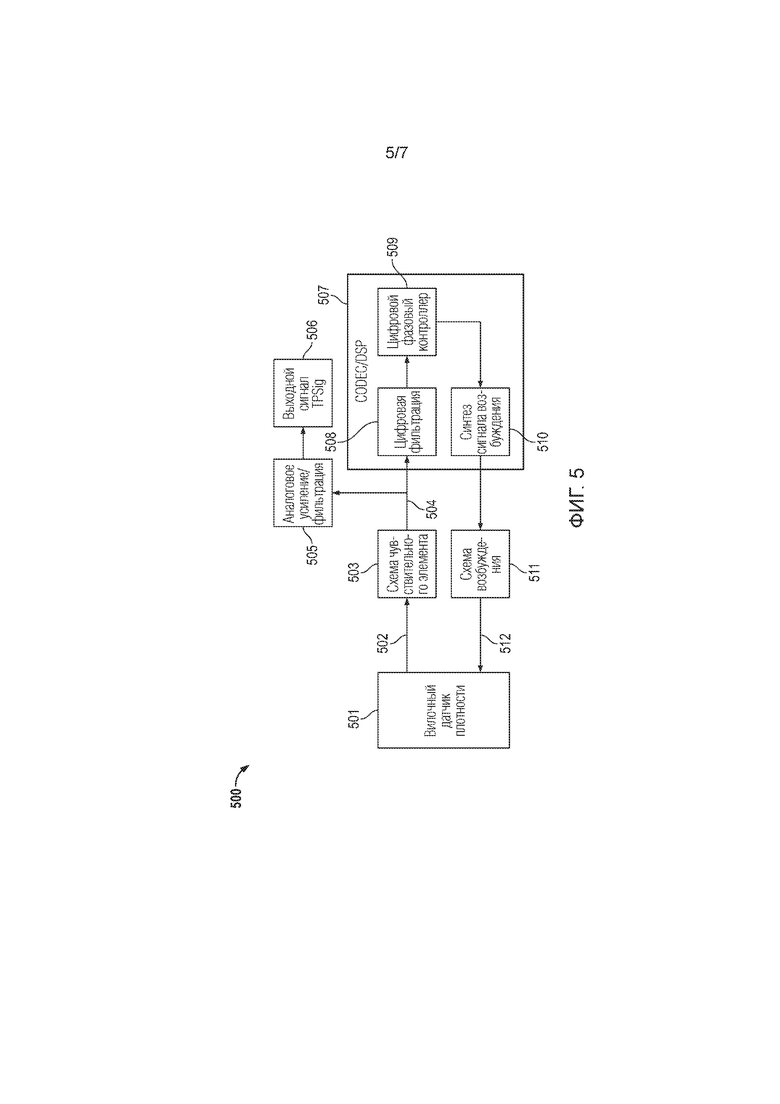
фиг.5 изображает блок-схему связи между вилочным чувствительным элементом, TPSig и схемой формирования возбуждения.
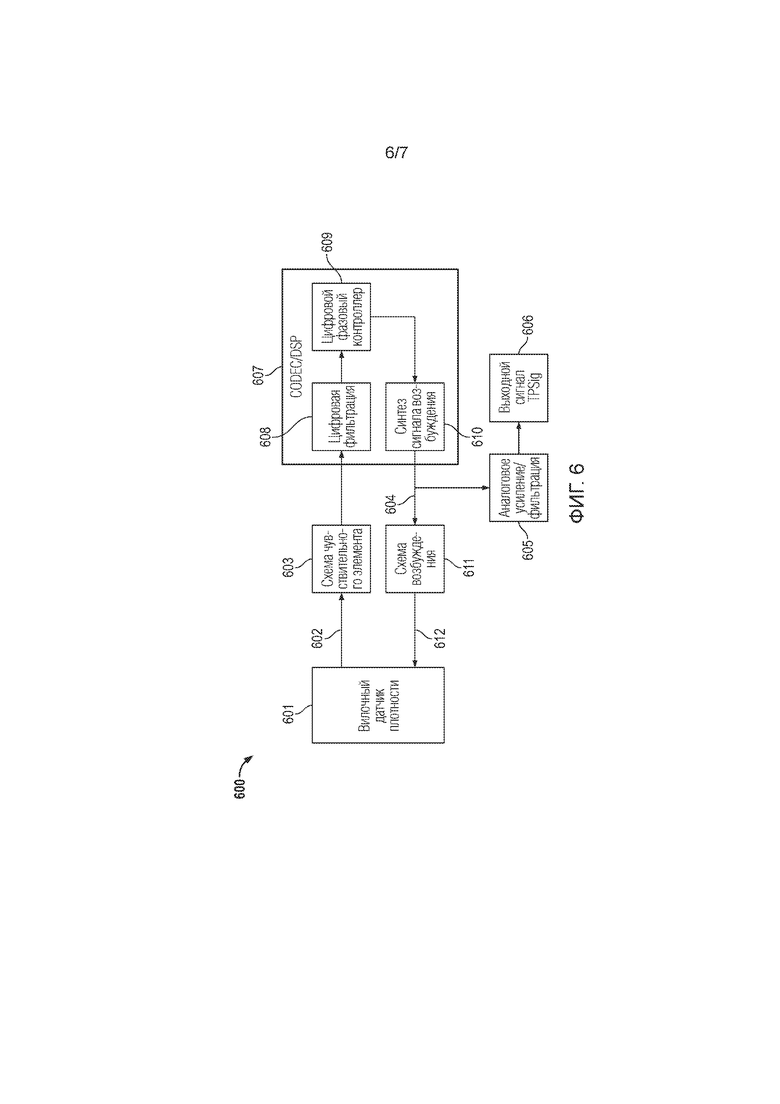
фиг.6 изображает блок-схему улучшения связи между вилочным чувствительным элементом, TPSig и схемой формирования возбуждения.
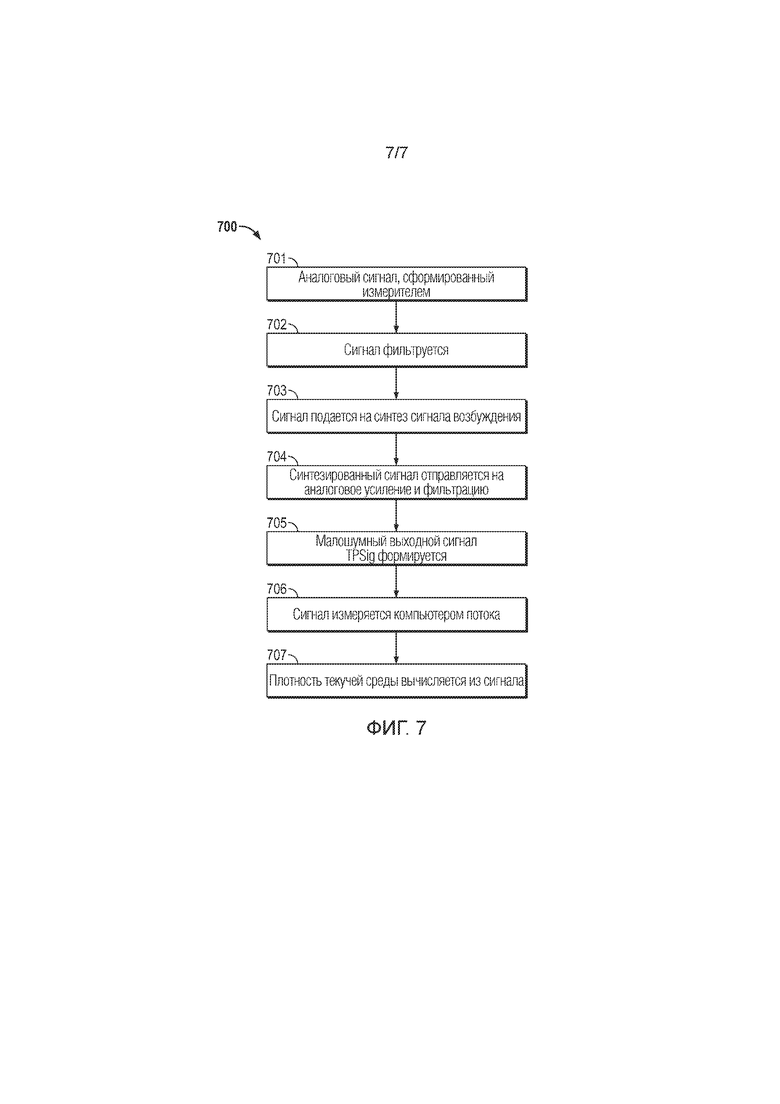
фиг.7 изображает блок-схему этапов в способе формирования сигнала периода времени.
Осуществление изобретения
Фиг.1-7 и нижеследующее описание представляют конкретные примеры для информирования специалистов в данной области техники о том, как изготовить и использовать наилучший вариант осуществления для управления вибрацией вибрационного датчика на основе фазовой ошибки. В целях информирования о принципах изобретения некоторые известные аспекты были упрощены или пропущены. Специалистам в данной области техники будут понятны вариации на основе этих примеров, которые входят в объем настоящего описания. Специалистам в данной области техники будет понятно, что признаки, описанные ниже, могут быть объединены различными способами для формирования множества вариаций управления вибрацией вибрационного датчика на основе фазовой ошибки. Таким образом, варианты осуществления, описанные ниже, не ограничены конкретными примерами, описанными ниже, а ограничены только формулой изобретения и ее эквивалентами.
Фиг.2 показывает вибрационный датчик 5 в соответствии с вариантом осуществления. Вибрационный датчик 5 может содержать вибрационный элемент 104 и измерительную электронику 20, при этом вибрационный элемент 104 соединен с измерительной электроникой 20 посредством вывода или выводов 100. В некоторых вариантах осуществления вибрационный датчик 5 может содержать вибрационный зубцовый датчик или вилочный датчик плотности (см. фиг.3 и сопроводительное обсуждение). Однако другие вибрационные датчики также рассматриваются и входят в объем описания и формулы изобретения.
Вибрационный датчик 5 может быть, по меньшей мере частично, погружен в текучую среду, которую нужно охарактеризовать. Текучая среда может содержать жидкость или газ. В качестве альтернативы текучая среда может содержать многофазную текучую среду, такую как жидкость, которая включает в себя увлеченный газ, увлеченные твердые частицы, многочисленные жидкости или комбинации этого. Некоторые иллюстративные текучие среды включают в себя цементный раствор, нефтепродукты и тому подобное. Вибрационный датчик 5 может быть установлен в трубе или трубопроводе, резервуаре, контейнере или других сосудах для текучей среды. Вибрационный датчик 5 также может быть установлен в коллекторе или аналогичной конструкции для направления потока текучей среды. Однако другие варианты установки также рассматриваются и входят в объем описания и формулы изобретения.
Вибрационный датчик 5 работает для обеспечения измерений текучей среды. Вибрационный датчик 5 может обеспечивать измерения текучей среды, включающие в себя одно или более из плотности текучей среды и вязкости текучей среды для текучей среды, включая текущие или нетекущие текучие среды. Вибрационный датчик 5 может обеспечивать измерения текучей среды, включающие в себя массовый расход текучей среды, объемный расход текучей среды и/или температуру текучей среды. Этот перечень не является исчерпывающим, и вибрационный датчик 5 может измерять или определять другие характеристики текучей среды.
Измерительная электроника 20 может обеспечивать электропитанием вибрационный элемент 104 через вывод или выводы 100. Измерительная электроника 20 управляет работой вибрационного элемента 104 через вывод или выводы 100. Например, измерительная электроника 20 может формировать сигнал возбуждения и подавать сформированный сигнал возбуждения на вибрационный элемент 104, при этом вибрационный элемент 104 формирует вибрацию в одном или более вибрационных компонентах, используя сформированный сигнал возбуждения. Сформированный сигнал возбуждения может управлять вибрационной амплитудой и частотой вибрационного элемента 104. Сформированный сигнал возбуждения также может управлять вибрационной продолжительностью и/или вибрационной синхронизацией.
Измерительная электроника 20 также может принимать сигнал или сигналы вибрации от вибрационного элемента 104 через вывод или выводы 100. Измерительная электроника 20 может обрабатывать сигнал или сигналы вибрации, например, для формирования измерения плотности. Измерительная электроника 20 обрабатывает сигнал или сигналы вибрации, принятые от вибрационного элемента 104, для определения частоты сигнала или сигналов. Кроме того, или в дополнение, измерительная электроника 20 обрабатывает сигнал или сигналы вибрации для определения других характеристик текучей среды, таких как вязкость или разность фаз между сигналами, которые могут быть обработаны, например, для определения расхода текучей среды. Как можно понять, разность фаз обычно измеряется или выражается в пространственных единицах, таких как градусы или радианы, хотя могут использоваться любые подходящие единицы, например, временные единицы. Если используются временные единицы, то разность фаз может упоминаться специалистами в данной области техники как временная задержка между сигналом вибрации и сигналом возбуждения. Другие характеристики вибрационного отклика и/или измерения текучей среды также рассматриваются и входят в объем описания и формулы изобретения.
Измерительная электроника 20 может быть дополнительно соединена с линией 26 связи. Измерительная электроника 20 может передавать сигнал вибрации по линии 26 связи. Измерительная электроника 20 также может обрабатывать принятый сигнал вибрации для формирования значения или значений измерения и может передавать значение или значения измерения по линии 26 связи. Кроме того, измерительная электроника 20 может принимать информацию по линии 26 связи. Например, измерительная электроника 20 может принимать команды, обновления, рабочие значения или изменения рабочих значений и/или обновления или изменения программного обеспечения по линии 26 связи.
Фиг.3 показывает вибрационный датчик 5 в соответствии с вариантом осуществления. Измерительная электроника 20 соединена с вибрационным элементом 104 посредством вала 115 в показанном варианте осуществления. Вал 115 может иметь любую желаемую длину. Вал 115 может быть по меньшей мере частично полым. Провода или другие проводники могут проходить между измерительной электроникой 20 и вибрационным элементом 104 через вал 115. Измерительная электроника 20 включает в себя компоненты схемы, такие как схема 134 приемника, схема 136 интерфейса и схема 138 привода. В показанном варианте осуществления схема 134 приемника и схема 138 привода непосредственно соединены с выводами вибрационного элемента 104. В качестве альтернативы, измерительная электроника 20 может содержать отдельный компонент или устройство от вибрационного элемента 104, при этом схема 134 приемника и схема 138 привода соединены с вибрационным элементом 104 через вывод или выводы 100.
В показанном варианте осуществления вибрационный элемент 104 вибрационного датчика 5 содержит настроечную вилочную конструкцию, при этом вибрационный элемент 104, по меньшей мере частично, погружен в измеряемую текучую среду. Вибрационный элемент 104 включает в себя корпус 105, который может быть прикреплен к другой конструкции, такой как труба, трубопровод, резервуар, емкость, коллектор или любая другая конструкция для обращения с текучей средой. Корпус 105 удерживает вибрационный элемент 104, при этом вибрационный элемент 104 остается по меньшей мере частично открытым. Вибрационный элемент 104, таким образом, выполнен с возможностью быть погруженным в текучую среду.
Вибрационный элемент 104 в показанном варианте осуществления включает в себя первый и второй зубцы 112 и 114, которые выполнены с возможностью захождения, по меньшей мере частично, в текучую среду. Первый и второй зубцы 112 и 114 содержат удлиненные элементы, которые могут иметь любую желаемую форму поперечного сечения. Первый и второй зубцы 112 и 114 могут быть, по меньшей мере частично, гибкими или упругими по своей природе. Вибрационный датчик 5 дополнительно включает в себя соответствующие первый и второй пьезоэлементы 122 и 124, которые содержат пьезоэлектрические кристаллические элементы. Первый и второй пьезоэлементы 122 и 124 расположены рядом с первым и вторым зубцами 112 и 114 соответственно. Первый и второй пьезоэлементы 122 и 124 выполнены с возможностью контакта и механического взаимодействия с первым и вторым зубцами 112 и 114.
Первый пьезоэлемент 122 находится в контакте по меньшей мере с частью первого зубца 112. Первый пьезоэлемент 122 также электрически соединен со схемой 138 привода. Схема 138 привода подаёт сформированный сигнал возбуждения на первый пьезоэлемент 122. Первый пьезоэлемент 122 расширяется и сжимается при воздействии сформированного сигнала возбуждения. В результате первый пьезоэлемент 122 может поочередно деформировать и перемещать первый зубец 112 из стороны в сторону в вибрационном движении (см. пунктирные линии), возмущая текучую среду периодическим возравратно-поступательным образом.
Второй пьезоэлемент 124 показан как соединенный со схемой 134 приемника, которая производит сигнал вибрации, соответствующий деформациям второго зубца 114 в текучей среде. Движение второго зубца 114 вызывает формирование соответствующего электрического сигнала вибрации вторым пьезоэлементом 124. Второй пьезоэлемент 124 передает сигнал вибрации измерительной электронике 20. Измерительная электроника 20 включает в себя схему 136 интерфейса.
Схема 136 интерфейса может быть выполнена с возможностью связи с внешними устройствами. Схема 136 интерфейса передает сигнал или сигналы измерения вибрации и может передавать определенные характеристики текучей среды одному или более внешним устройствам. Измерительная электроника 20 может передавать характеристики сигнала вибрации через схему 136 интерфейса, такие как частота сигнала вибрации и амплитуда сигнала вибрации. Измерительная электроника 20 может передавать измерения текучей среды через схему 136 интерфейса, такие как, помимо прочего, плотность и/или вязкость текучей среды. Другие измерения текучей среды также рассматриваются и входят в объем описания и формулы изобретения. Кроме того, схема 136 интерфейса может принимать сообщения от внешних устройств, включая команды и данные для формирования значений измерений, например. В некоторых вариантах осуществления схема 134 приемника соединена со схемой 138 привода, причем схема 134 приемника подаёт сигнал вибрации в схему 138 привода.
Схема 138 привода формирует сигнал возбуждения для вибрационного элемента 104. Схема 138 привода может изменять характеристики сформированного сигнала возбуждения. Схема 138 привода включает в себя привод с разомкнутым контуром. Привод с разомкнутым контуром может использоваться схема 138 привода для формирования сигнала возбуждения и подачи сформированного сигнала возбуждения на вибрационный элемент 104 (например, на первый пьезоэлемент 122). В некоторых вариантах осуществления привод с разомкнутым контуром формирует сигнал возбуждения для достижения целевой разности φt фаз, начиная с начальной частоты ωi. Привод с разомкнутым контуром может не работать на основе обратной связи от сигнала вибрации, как будет описано более подробно ниже со ссылкой на фиг.4.
Фиг.4 показывает блок-схему вибрационного датчика 5 с более подробным представлением схемы 138 привода. Вибрационный датчик 5 показан со схемой 138 привода. Схема 134 приемника и схема 136 интерфейса не показаны для ясности. Схема 138 привода включает в себя аналоговый входной фильтр 138a и аналоговый выходной фильтр 138b, которые соединены с приводом 147 с разомкнутым контуром. Аналоговый входной фильтр 138a фильтрует сигнал вибрации, а аналоговый выходной фильтр 138b фильтрует сформированный сигнал возбуждения.
Привод 147 с разомкнутым контуром включает в себя аналого-цифровой преобразователь 147a, который соединен с фазовым детектором 147b. Фазовый детектор 147b соединен с генератором 147c сигналов. Также показан вибрационный элемент 104, который включает в себя первый пьезоэлемент 122 и второй пьезоэлемент 124. Привод 147 с разомкнутым контуром может быть реализован с помощью цифрового процессора сигналов, который выполнен с возможностью выполнения одного или более кодов или программ, которые дискретизируют, обрабатывают и формируют сигналы. Дополнительно или в качестве альтернативы привод 147 с разомкнутым контуром может быть реализован посредством схемы электроники, соединенной с цифровым процессором сигналов, или подобным образом.
Сигнал вибрации, обеспечиваемый первым пьезоэлементом 122, отправляется на аналоговый входной фильтр 138a. Аналоговый входной фильтр 138a фильтрует сигнал вибрации, перед тем как сигнал вибрации будет дискретизирован аналого-цифровым преобразователем 147a. В показанном варианте осуществления аналоговый входной фильтр 138a может состоять из фильтра нижних частот с частотой среза, которая составляет примерно половину частоты дискретизации привода 147 с разомкнутым контуром, хотя может быть использован любой подходящий фильтр нижних частот. Фильтр нижних частот может быть снабжен пассивными компонентами, такими как индуктор, конденсатор и резистор, хотя могут быть использованы любые подходящие компоненты, распределенные или дискретные, такие как фильтр операционного усилителя.
Аналого-цифровой преобразователь 147a может дискретизировать отфильтрованный сигнал вибрации для формирования дискретизированного сигнала вибрации. Аналого-цифровой преобразователь 147a также может дискретизировать сформированный сигнал возбуждения через второй канал (не показан). Дискретизация может осуществляться с помощью любого подходящего способа дискретизации. Как можно понять, сформированный сигнал возбуждения, дискретизированный аналого-цифровым преобразователем 147a, не имеет шума, связанного с сигналом вибрации. Сформированный сигнал возбуждения подаётся в фазовый детектор 147b.
Фазовый детектор 147b может сравнивать фазы дискретизированного сигнала вибрации и дискретизированного сформированного сигнала возбуждения. Фазовый детектор 147b может быть процессором, выполненным с возможностью выполнения одного или более кодов или программ, которые дискретизируют, обрабатывают и формируют сигналы для обнаружения разности фаз между двумя сигналами, как будет описано более подробно ниже со ссылкой на фиг.5. В отношении варианта осуществления, показанного на фиг.4, сравнение обеспечивает измеренную разность φm фаз между дискретизированным сигналом вибрации и дискретизированным сформированным сигналом возбуждения.
Измеренная разность φm фаз сравнивается с целевой разностью φt фаз. Целевая разность φt фаз является желаемой разностью фаз между сигналом вибрации и сформированным сигналом возбуждения. Например, в варианте осуществления, в котором целевая разность φt фаз составляет примерно 45°, разность между измеренной разностью φm фаз и целевой разностью φt фаз может быть равна нулю, если измеренная разность φm фаз также составляет или примерно равна 45°. Однако любая подходящая целевая разность φt фаз может быть использована в альтернативных вариантах осуществления. Используя сравнение между измеренной разностью φm фаз и целевой разностью φt фаз, фазовый детектор 147b может формировать командную частоту ωc.
Командная частота ωc может использоваться для формирования сигнала возбуждения. Дополнительно или в качестве альтернативы можно использовать начальную частоту ωi, которая не определяется из сравнения между измеренной разностью φm фаз и целевой разностью φt фаз. Начальная частота ωi может быть предварительно выбранной частотой, используемой для формирования начального сформированного сигнала возбуждения. Начальный сформированный сигнал возбуждения может быть дискретизирован, как описано выше, и сравнен с дискретизированным сигналом вибрации. Сравнение между дискретизированным начальным сформированным сигналом возбуждения и дискретизированным сигналом вибрации может быть использовано для формирования командной частоты ωc. Командная частота ωc и начальная частота ωi могут иметь единицы радианов в секунду, хотя могут использоваться любые подходящие единицы, такие как, например, герцы (Гц). Командная частота ωc или начальная частота ωi может быть подана в генератор 147c сигналов.
Генератор 147c сигналов может принимать командную частоту ωc от фазового детектора 147b и обеспечивать сформированный сигнал возбуждения с частотой, которая совпадает с командой частотой ωc. Сформированный сигнал возбуждения может быть отправлен, как обсуждалось выше, аналого-цифровому преобразователю 147а. Сформированный сигнал возбуждения также отправляется первому пьезоэлементу 122 через аналоговый выходной фильтр 138b. Дополнительно или в качестве альтернативы, сформированный сигнал возбуждения может быть отправлен другим компонентам в других вариантах осуществления.
Как обсуждалось выше, вибрационный элемент 104 имеет отклик вибрации из-за сигнала возбуждения. Отклик вибрации имеет параметры отклика вибрации, такие как резонансная частота ω0, коэффициент Q добротности или т. п., которые могут быть использованы для вычисления различных свойств измеряемой текучей среды. Отклик вибрации и иллюстративные параметры отклика вибрации, а также то, как параметры отклика вибрации могут быть использованы для вычисления свойств текучей среды, обсуждаются более подробно ниже.
Фиг.5 иллюстрирует блок-схему 500 существующего продукта для измерения плотности, имеющего вилочную конфигурацию. Вилочный датчик 501 плотности представляет собой набор из по меньшей мере одного датчика, расположенного на вилочном измерителе. Вилочный измеритель может использоваться для определения плотности текучей среды путем сравнения резонансной частоты вилки в отсутствие текучей среды с частотой вилки, погруженной в текучую среду, подлежащую измерению. Вилочный измеритель является частью контура обратной связи и соединен посредством первого контакта 502 со схемой 503 чувствительного элемента. Схема 503 чувствительного элемента ответвляется 504 на аналоговое усиление/фильтрацию 505 и на синтезированный выходной сигнал 506 периода времени, далее упоминаемый как TPSig. Схема 503 чувствительного элемента также соединена с аналого-цифровым преобразователем, который соединен с цифровым процессором 507 сигналов, далее называемый CODEC/DSP 507, который состоит из цифрового фильтрующего устройства 508, цифрового фазового контроллера 509 и синтеза 510 сигнала возбуждения. CODEC/DSP 507 анализирует сигнал от вилочного измерителя, фильтрует сигнал 507 в цифровой форме, подстраивает фазу сигнала 509 и формирует синтезированный сигнал возбуждения. Синтезированный сигнал возбуждения отправляется в схему 511 возбуждения, которая обеспечивает движущую силу, которая также может называться сигналом возбуждения.
Выходной сигнал периода времени может быть создан путем обработки сигнала от вилочного датчика 501 плотности. Этот существующий способ фильтрации и усиления сигнала, поступающего от чувствительных элементов, с использованием аналоговых средств хорошо работает во многих ситуациях, где используется вилочный измеритель плотности. Однако проблемы могут возникать в ситуациях, где присутствует большое количество шума процесса.
Шум процесса может быть вызван любым количеством немоделируемой системной динамики возмущающих входных сигналов. Шум процесса может исходить от внутренних источников и может включать в себя, но не ограничивается этим, параметрический шум, тепловой шум, входной шум, термоэдс, диэлектрическое поглощение, аудиофонический шум и тому подобное. Шум процесса также может исходить от внешних источников шума и может включать в себя, но не ограничивается этим, связь по электрическому полю, индуктивную связь, радиочастотную связь, контуры заземления, подавление синфазных помех, кабельный шум, фильтрацию шума и тому подобное.
Высокий уровень шума процесса может вырасти и стать значительным и постоянным компонентом в сигнале чувствительного элемента. Такие ситуации шума процесса могут привести к тому, что выходной сигнал TPSig станет неустойчивым до такой степени, что входной сигнал более не сможет успешно измеряться компьютером потока.
Шум процесса, возникающий на чувствительных элементах, является большой проблемой в отношении контроля фазовой ошибки вилки. Технология вилочного измерителя плотности, раскрытая в заявке № 62/094,217, позволяет вилочному измерителю плотности успешно управлять вилкой и измерять плотность в цифровой форме в условиях шума процесса, в которых такие вилочные измерители плотности ранее не работали. Технология по заявке № 62/094,217 не учитывает фактический шум в чувствительных элементах. Этот шум подается в схему TPSig и приводит к тому, что компьютеры потока теряют свои измерения периода времени.
Для того, чтобы выходной сигнал TPSig был последовательно измерен компьютером потока в приложениях с высоким уровнем шума, шум от аналогового сигнала должен быть удален до подачи сигнала в выходную схему TPSig. Синтез сигнала, используемого для выходного сигнала TPSig, гарантирует, что любой реальный шум процесса на реальном сигнале чувствительного элемента не может распространяться на измерение компьютера потока.
Выходной сигнал периода времени также может быть создан путем привязки к сигналу возбуждения.
Фиг.6 иллюстрирует улучшенный вариант осуществления в виде блок-схемы 600. Вилочный датчик 601 плотности соединен посредством первого контакта 602 со схемой 603 чувствительного элемента. Схема 603 чувствительного элемента также соединена с CODEC/DSP 607, который состоит из цифрового фильтрующего устройства 608, цифрового фазового контроллера 609 и синтеза 610 сигнала возбуждения. CODEC/DSP 607 дополнительно соединен со схемой 611 возбуждения, и второй контакт 612 подключен к вилочному датчику 601 плотности.
Различие между настоящим вариантом осуществления и улучшением заключается в том, что в первом варианте 500 осуществления ответвление 504 происходит между схемой 503 чувствительного элемента и CODEC/DSP 507, тогда как во втором варианте 600 осуществления ответвление происходит между CODEC/DSP 607 и схемой 611 возбуждения.
Фиг.7 иллюстрирует опцию вилочного датчика плотности, чтобы пользователь получал необработанный период времени датчика через измеритель выходного сигнала TPSig. Формирование сигнала периода времени начинается с аналогового сигнала 701 чувствительного элемента, поступающего от измерителя 601 вилочного датчика плотности. Сигнал поступает от измерителя 601 вилочного датчика плотности и идет в фильтр, где он фильтруется 702. Затем сигнал отправляется на синтез 703 сигнала возбуждения. Затем TPSig отправляется на аналоговое усиление/фильтрацию, где он может быть усилен 704. Усиление здесь относится к способности схемы увеличивать мощность или амплитуду сигнала путем добавления энергии от источника питания сигналу. Выходная схема TPSig выводит и обеспечивает прямоугольный сигнал, представляющий частоту колебаний измерителя 705. Затем этот сигнал измеряется 706 компьютером потока, который использует период времени этого сигнала в сочетании с другими параметрами процесса, чтобы вычислить плотность 707 текучей среды, в которую вставлены штыри вилки, далее упоминаемые как зубцы вилки.
Таким образом, этапы процесса являются следующими:
1. Получить сигнал от датчика на измерителе 601
2. Пропустить сигнал через CODEC/DSP 607
3. Сформировать синтезированный сигнал 610 возбуждения
4. Взять синтезированный сигнал возбуждения и отправить его аналоговому усилителю/фильтру 605
5. Вывести сигнал 606 TPSig
Способ реализации настоящей заявки заключается в использовании синтезатора сигнала возбуждения. Синтезатор формирует входной сигнал для использования в качестве входного сигнала схемой аналогового усиления/фильтрации, связанной с вилочным передатчиком плотности. В заявке № 62/094,217 вилочный синтезированный сигнал возбуждения - это сигнал, который управляет частотой колебаний вилочного измерителя плотности. В настоящей заявке сигнал возбуждения может использоваться в качестве входного сигнала для схемы аналогового усилителя/фильтра для формирования последовательного, малошумного выходного сигнала TPSig, который колеблется на частоте, идентичной частоте колебаний вилочного измерителя плотности. Ключевым преимуществом настоящей заявки является то, что сигнал полностью синтезируется в цифровой форме фазовым контроллером. Это гарантирует, что любой реальный шум процесса, который может появиться в чувствительных элементах вилочного измерителя плотности, не способен распространяться на выходной сигнал TPSig.
Подробное описание вышеприведенных вариантов осуществления не является исчерпывающим описанием всех вариантов осуществления, предусмотренных авторами изобретения, в пределах объема заявки. Действительно, специалисты в данной области техники поймут, что некоторые элементы вышеописанных вариантов осуществления могут быть по-разному объединены или исключены для создания дополнительных вариантов осуществления, и такие дополнительные варианты осуществления входят в объем и идею заявки. Специалистам в данной области техники также будет очевидно, что вышеописанные варианты осуществления могут быть объединены целиком или частично для создания дополнительных вариантов осуществления в пределах объема и идеи заявки.
Изобретение относится к вибрационным датчикам и более конкретно к формированию синтезированного выходного сигнала периода времени для компенсации ошибок, вызванных шумом процесса, который может возникать при существующих измерениях плотности. Способ формирования сигнала включает этапы, на которых: принимают сигнал от измерителя (601); фильтруют (608) сигнал; синтезируют (610) отфильтрованный сигнал на основании отфильтрованного сигнала; вводят синтезированный отфильтрованный сигнал (604) в выходную схему; и формируют синтезированный выходной сигнал (606) периода времени с использованием выходной схемы. Технический результат заключается в повышении точности вибрационных расходомеров путем компенсации ошибки, вызванной шумом процесса. 2 н. и 13 з.п. ф-лы, 7 ил.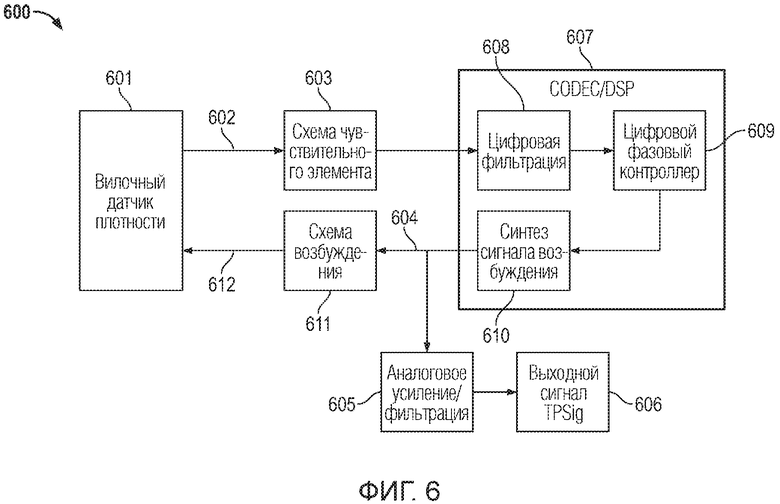
1. Способ формирования сигнала, содержащий этапы, на которых:
принимают сигнал от измерителя (601);
фильтруют (608) сигнал;
синтезируют (610) отфильтрованный сигнал на основании отфильтрованного сигнала;
вводят синтезированный отфильтрованный сигнал (604) в выходную схему; и
формируют синтезированный выходной сигнал (606) периода времени с использованием выходной схемы.
2. Способ по п.1, в котором измеритель представляет собой вилочный датчик (601) плотности.
3. Способ по п.1, в котором фильтрация также включает в себя этап, на котором усиливают (605) сигнал.
4. Способ по п.3, в котором фильтрация использует аналоговую схему (605).
5. Способ по п.1, в котором выходная схема представляет собой схему (606) синтезированного выходного сигнала периода времени.
6. Способ по п.1, в котором схема (606) синтезированного выходного сигнала периода времени обеспечивает прямоугольный сигнал.
7. Способ по п.6, в котором прямоугольный сигнал является полностью синтезированным.
8. Способ по п.1, в котором сигнал от датчика представляет собой аналоговый сигнал чувствительного элемента (603).
9. Способ формирования синтезированного выходного сигнала периода времени, содержащий этапы, на которых:
принимают сигнал чувствительного элемента от измерителя (701) вилочного датчика плотности;
фильтруют сигнал (702) чувствительного элемента;
синтезируют отфильтрованный аналоговый сигнал (704) чувствительного элемента для создания сигнала возбуждения; и
вводят сигнал возбуждения для формирования синтезированного выходного сигнала периода времени.
10. Способ по п.9, в котором фильтрация также включает в себя этап, на котором усиливают (704) сигнал.
11. Способ по п.9, в котором фильтрация (702) использует аналоговую схему.
12. Способ по п.9, в котором выходная схема представляет собой схему синтезированного выходного сигнала периода времени.
13. Способ по п.9, в котором схема синтезированного выходного сигнала периода времени обеспечивает прямоугольный сигнал.
14. Способ по п.13, в котором прямоугольный сигнал является полностью синтезированным.
15. Способ по п.9, в котором сигнал от датчика является аналоговым сигналом чувствительного элемента.
| WO 2014176122 A1, 30.10.2014 | |||
| WO 2014175902 A1, 30.10.2014 | |||
| US 2010161251 A1, 24.06.2010 | |||
| US 2009205411 A1, 20.08.2009. |

