Изобретение относится к оптико-электронному приборостроению и может быть использовано для получения сканерных изображений и автоматизированного дешифрирования цифровых графических данных об объектах наблюдения на подстилающей поверхности, полученных в инфракрасной области спектра, включая обнаружение объектов заданных типов, автоматическую классификацию регистрируемой информации о тепловом излучении объектов, определение географических координат обнаруженных объектов по их изображениям, взаимное ориентирование цифровых сканерных изображений.
Устройства для дистанционного зондирования Земли в инфракрасной области спектра представляют собой тепловизионные сканерные съемочные системы, которые обеспечивают скорость покрытия земной поверхности до 1000 км2/час с размером пиксела на Земле от нескольких сантиметров и позволяют выполнять задачи обнаружения и локализации пожаров, поиска людей, кораблей, самолетов при чрезвычайных ситуациях, задачи ведения учета лесных хозяйств, обнаружения несанкционированных вырубок леса, диагностики состояния нефте- и газопроводов, контроля тепловых сетей, обеспечения безопасности объектов нефтегазового комплекса, выполнения картографо-геодезических и инженерно-изыскательных работ.
Тепловизионные сканерные съемочные системы обеспечивают формирование изображений за счет перемещения либо самой съемочной системы, установленной на движущемся относительно подстилающей поверхности носителе, либо сканирующего зеркала аппаратуры съемки в направлении, перпендикулярном направлению полета.
Известно устройство для дистанционного зондирования Земли в инфракрасной области спектра - авиационный сканирующий тепловизор "Вулкан-4000" (см. http://www.teploscan.ru/index.php/publikatsii/28-volkovitskij-a-k-sklovskij-s-a-kak-i-zachem-my-delaem-teplovuyu-infrakrasnuyu-aeros-emku).
Известна сканирующая система, содержащая входной объектив, цилиндрическую зеркальную поверхность, сканирующее зеркало, установленное с возможностью вращения относительно оси, параллельной образующей цилиндрической зеркальной поверхности, проекционный объектив, микросканер, фотоприемное устройство, выход которого соединен с входом электронного блока обработки сигналов и отображения видеоинформации (см. патент RU 2273037 С2, МПК G02B 26/10, опубликован 27.03.2006 г.).
Также известно устройство для дистанционного получения изображений в тепловой области спектра поверхности Земли из космоса и авиационных носителей различного класса, содержащее корпус, в котором последовательно установлены и оптически связаны между собой сканирующая система, объектив, фильтр и приемник излучения (см. патент RU 2150725 С1, МГЖ G02B 26/10, опубликован 10.06.2000 г.).
Прототипом является устройство для дистанционного зондирования Земли в инфракрасной области спектра - тепловизор авиационный сканирующий «ИКАР» (см. Авиационный тепловизор ИКАР-002М, http://www.teploscan.ru/index.php/nasha-apparatura/aviatsionnyj-teplovizor-ikar-002), содержащий последовательно установленные сканирующую систему, объектив, приемник излучения и аналого-цифровой преобразователь, выход которого подключен к первому входу блока обработки и отображения цифровых графических данных, который выполнен с возможностью подключения его второго входа к выходу навигационной системы.
При выполнении задач дистанционного мониторинга земной поверхности с целью оперативного поиска людей, обнаружения возгораний, утечек в трубопроводах, природных аномалий на обширных территориях важную роль имеет не только скорость покрытия земной поверхности, но и скорость анализа регистрируемых данных с целью обнаружения объектов поиска.
Объем графической информации, формируемый известными тепловизионными сканерными съемочными системами, не позволяет оператору обрабатывать все цифровые графические данные непосредственно в процессе выполнения съемочных работ, что влечет за собой необходимость включения в цикл проводимых работ этапа постобработки информации, когда после выполнения съемочных работ с запоминающего устройства аппаратуры съемки копируется отснятый материал, а затем происходит анализ изображений с целью получения необходимой информации, что существенно увеличивает сроки выполнения задач дистанционного мониторинга земной поверхности.
Таким образом, основным недостатком аналогов и прототипа является длительное время выполнения задач дистанционного мониторинга земной поверхности ввиду необходимости включения в цикл проводимых съемочных работ этапа постобработки цифровых графических данных.
Постобработка делает невозможным применение известных устройств дистанционного зондирования при решении задач оперативного реагирования, что значительно ограничивает сценарии применения устройства. Например, сценарий, при котором в случае обнаружения искомого объекта/явления, необходимо незамедлительно определить координаты для отправки беспилотника или наземного экипажа.
Задачей изобретения является разработка устройства для дистанционного зондирования Земли в инфракрасной области спектра, позволяющего оператору обрабатывать все цифровые графические данные непосредственно на борту летательного аппарата в процессе выполнения съемочных работ.
Техническим результатом изобретения является расширение сценариев применения устройства и возможности его применения при необходимости оперативного реагирования благодаря сокращению времени выполнения дистанционного мониторинга земной поверхности за счет обеспечения автоматического дешифрирования сканерных изображений подстилающей поверхности непосредственно на борту летательного аппарата в процессе выполнения съемочных работ.
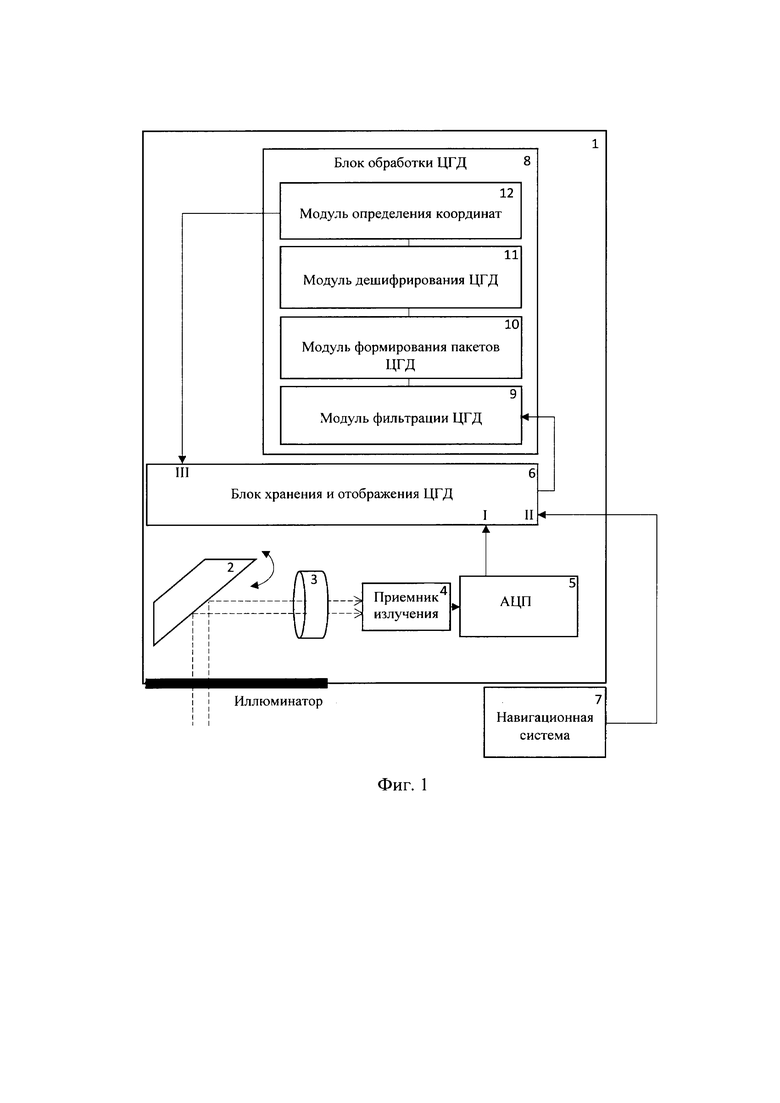
Технический результат достигается тем, что в устройство для дистанционного зондирования Земли в инфракрасной области спектра, содержащее последовательно установленные сканирующую систему, объектив, приемник излучения и аналого-цифровой преобразователь, выход которого подключен к первому входу блока хранения и отображения цифровых графических данных (ЦГД), который выполнен с возможностью подключения его второго входа к выходу навигационной системы, согласно настоящему изобретению, дополнительно введен блок обработки ЦГД, содержащий последовательно соединенные модуль фильтрации ЦГД, модуль формирования пакетов ЦГД, модуль дешифрирования ЦГД и модуль определения координат, при этом вход модуля фильтрации ЦГД, являющийся входом блока обработки ЦГД, подключен к выходу блока хранения и отображения ЦГД, третий вход которого соединен с выходом модуля определения координат, являющимся выходом блока обработки ЦГД.
На фиг.1 представлена функциональная схема предлагаемого устройства для дистанционного зондирования Земли в инфракрасной области спектра.
Устройство для дистанционного зондирования Земли в инфракрасной области спектра содержит корпус 1, в котором установлены последовательно расположенные сканирующая система 2, объектив 3, приемник 4 излучения, работающий в диапазоне 8-12 мкм, аналого-цифровой преобразователь 5 (АЦП), выполненный в виде 14-разрядной высокоскоростной микросхемы АЦП, блок 6 хранения и отображения ЦГД, выполненный в виде процессора Intel Core i9, сетевого хранилища (NAS) Synology DS 720+.
Выход АЦП 5 подключен к первому входу I блока 6 хранения и отображения ЦГД.
Блок 6 хранения и отображения ЦГД выполнен с возможностью подключения его второго входа II к выходу навигационной системы 7.
Отличием предлагаемого устройства для дистанционного зондирования Земли в инфракрасной области спектра является то, что в него дополнительно введен блок 8 обработки ЦГД, содержащий последовательно соединенные модуль 9 фильтрации ЦГД, модуль 10 формирования пакетов ЦГД, модуль 11 дешифрирования, модуль 12 определения координат ЦГД, выполненные на базе процессора Intel Core i9 графического процессора NVIDIA 512 CUDA, вычислителей, запоминающих устройств, оперативного запоминающего устройства.
Вход модуля 9 фильтрации, являющийся входом блока обработки ЦГД, подключен к выходу блока 6 хранения и отображения ЦГД.
Третий вход III блока 6 хранения и отображения ЦГД соединен с выходом модуля 12 определения координат, являющимся выходом блока обработки ЦГД.
Конструктивно устройство для дистанционного зондирования Земли в инфракрасной области спектра выполнено в виде моноблока, состоящего из основания и верхней крышки, на которых жестко закреплены все узлы, блоки и модули.
Так, зеркало сканирующей системы 2 закреплено на валу кронштейна, закрепленного на основании моноблока, с возможностью качания за счет двигателя и угловых датчиков, соединенных с валом кронштейна.
Оптические элементы объектива 3, закрепленного на основании моноблока, установлены вдоль оптической оси перед приемником 4 излучения, представляющим собой матричное фотоприемное устройство (МФПУ), механически и электрически сопряженное с системой охлаждения.
Платы АЦП 5, блока 6 хранения и отображения ЦГД, модулей 9-12, блока 8 обработки ЦГД установлены на кронштейнах, закрепленных на основании моноблока.
Устройство для дистанционного зондирования Земли в инфракрасной области спектра работает следующим образом.
Зеркало сканирующей системы 2 располагается перед входным объективом 3 и совершает колебательные движения, что обеспечивает необходимую ширину полосы просмотра. За время прохождения сканирующего зеркала в одном направлении блок 6 хранения и отображения ЦГД получает данные с приемника 4 излучения, предварительно обработанные АЦП 5, и формирует одно цифровое сканерное изображение.
В процессе выполнения регистрации теплового излучения подстилающей поверхности заданной местности в рабочем спектральном диапазоне формируется множество цифровых сканерных изображений.
Цифровые сканерные изображения записываются в блок 6 хранения и отображения ЦГД.
Также в сетевое хранилище (на чертеже не показано) блока 6 хранения и отображения ЦГД записываются навигационные данные -географические координаты и углы ориентации носителя в пространстве в момент съемки, формируемые навигационной системой 7, которые используются при определении географических координат объектов, наблюдаемых на цифровых сканерных изображениях.
Цифровые сканерные изображения и навигационные данные, сформированные и записанные в сетевое хранилище блока 6 хранения и отображения ЦГД, передаются для обработки в блок 8 обработки ЦГД.
Процесс обработки выполняется путем последовательной загрузки цифровых данных сначала в модуль 9 фильтрации ЦГД, где происходит обработка гистограммы изображений с использованием цифрового фильтра.
Далее данные передаются в модуль 10 формирования пакетов ЦГД, где снимки группируются в пакеты по нескольку снимков в зависимости от решаемой задачи и параметров аппаратуры для организации дальнейших вычислений. Пакеты ЦГД поступают в модуль 11 дешифрирования ЦГД.
В модуле 11 дешифрирования ЦГД происходит автоматическое обнаружение объектов заданных типов на цифровых сканерных изображениях с применением детектирующих нейросетевых алгоритмов и автоматическая классификация графической информации цифровых сканерных изображений о тепловом излучении объектов с применением нейросетевых алгоритмов семантической сегментации.
Для осуществления автоматического обнаружения объектов в модуль 11 дешифриррвания ЦГД загружается заранее обученная модель нейронной сети, в которой настроены параметры слоев нейронной сети, позволяющие выделять различные признаки объектов для распознавания. Снимки обрабатываются поочередно, результатом дешифрирования с применением детектирующей нейронной сети является:
- координаты ограничивающего прямоугольника, в который вписан найденный объект;
- вероятность соответствия найденного объекта определенному классу;
- идентификатор класса, соответствующий найденному объекту, например, здание, автомобиль, ограждение.
Для выполнения автоматической классификации в модуль 11 дешифрирования ЦГД загружается заранее обученная модель нейронной сети для выполнения семантической сегментации.
Снимки обрабатываются поочередно, результатом классификации являются фрагменты цифровых сканерных изображений, размером 576x576 пикселей, на которых каждый пиксель отнесен к заданному классу, например, дороги, шоссе, озеро, колея, следы от колес машин, река, дороги без асфальтированного покрытия. Пиксели одного класса окрашены в один цвет.
В модуле 12 определения координат происходит трансформирование фрагментов цифровых сканерных изображений, выделенных модулем 11 дешифрирования, с учетом значений элементов внешнего ориентирования с информацией об ориентации устройства в момент съемки, полученной от навигационной системы, значений элементов внутреннего ориентирования, таких как фокусное расстояние, размер матрицы фотоприемного устройства, известных из характеристик объектива, значения угла положения качающегося зеркала в момент съемки, а также с учетом информации о рельефе местности. В результате выполненного трансформирования определяются координаты обнаруженных объектов.
Результаты передаются на вход III блока 6 хранения и отображения ЦГД, где используются для оперативного принятия решений.
Таким образом, выполнение устройства для дистанционного зондирования Земли в инфракрасной области спектра в соответствии с предложенным техническим решением, позволяет обеспечить расширение сценариев применения устройства и возможность его применения при решении задач оперативного реагирования благодаря сокращению времени выполнения дистанционного мониторинга земной поверхности за счет обеспечения возможности автоматического дешифрирования сканерных изображений подстилающей поверхности, включая обнаружение объектов заданных типов, автоматическую классификацию регистрируемой информации о тепловом излучении объектов, определение географических координат обнаруженных объектов по их изображениям, трансформирование фрагментов цифровых сканерных изображений непосредственно на борту летательного аппарата в процессе выполнения съемочных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СКАНЕРНЫХ СНИМКОВ | 2023 |
|
RU2798768C1 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ПОЛЁТНОЙ ИНФОРМАЦИИ ПРИ ПРОВЕДЕНИИ ЛЁТНЫХ ИСПЫТАНИЙ ЦИФРОВЫХ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОГО ДВОЙНИКА | 2023 |
|
RU2799904C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2719535C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2428722C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУНКЦИИ ПЕРЕДАЧИ МОДУЛЯЦИИ ЦИФРОВЫХ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2022 |
|
RU2789602C1 |
| Способ создания цифрового топографического фотодокумента и комплексное средство для осуществления этого способа | 2017 |
|
RU2665250C2 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
Изобретение относится к области оптико-электронного приборостроения и касается устройства для дистанционного зондирования Земли в инфракрасной области спектра. Устройство содержит последовательно установленные сканирующую систему, объектив, приемник излучения и аналого-цифровой преобразователь, выход которого подключен к первому входу блока хранения и отображения цифровых графических данных (ЦГД), который выполнен с возможностью подключения его второго входа к выходу навигационной системы. В устройство дополнительно введен блок обработки ЦГД, содержащий последовательно соединенные модуль фильтрации ЦГД, модуль формирования пакетов ЦГД, модуль дешифрирования ЦГД и модуль определения координат. Вход модуля фильтрации ЦГД, являющийся входом блока обработки ЦГД, подключен к выходу блока хранения и отображения ЦГД, третий вход которого соединен с выходом модуля определения координат, являющимся выходом блока обработки ЦГД. Технический результат заключается в обеспечении возможности его применения при решении задач оперативного реагирования благодаря сокращению времени выполнения дистанционного мониторинга земной поверхности за счет обеспечения возможности автоматического дешифрирования сканерных изображений подстилающей поверхности непосредственно на борту летательного аппарата в процессе выполнения съемочных работ. 1 ил.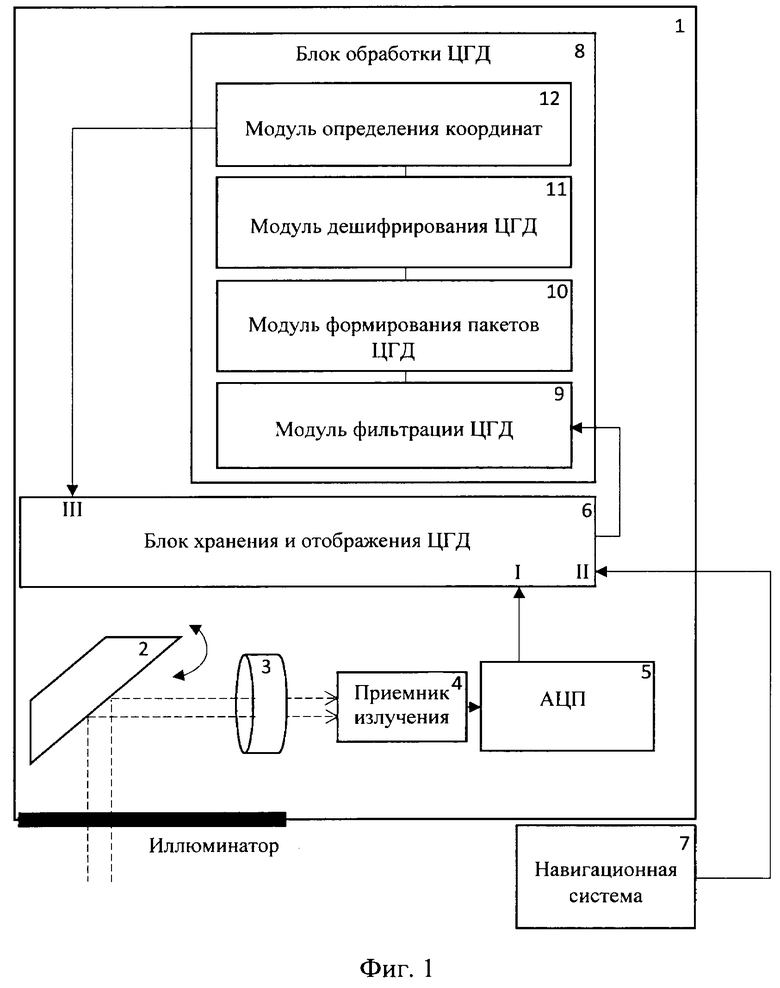
Устройство для дистанционного зондирования Земли в инфракрасной области спектра, содержащее последовательно установленные сканирующую систему, объектив, приемник излучения и аналого-цифровой преобразователь, выход которого подключен к первому входу блока хранения и отображения цифровых графических данных (ЦГД), который выполнен с возможностью подключения его второго входа к выходу навигационной системы, отличающееся тем, что в него дополнительно введен блок обработки ЦГД, содержащий последовательно соединенные модуль фильтрации ЦГД, модуль формирования пакетов ЦГД, модуль дешифрирования ЦГД и модуль определения координат, при этом вход модуля фильтрации ЦГД, являющийся входом блока обработки ЦГД, подключен к выходу блока хранения и отображения ЦГД, третий вход которого соединен с выходом модуля определения координат, являющимся выходом блока обработки ЦГД.
| СПОСОБ ТЕМАТИЧЕСКОГО ДЕШИФРИРОВАНИЯ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2075780C1 |
| МНОГОЗОНАЛЬНОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ПОЛНОГО ДИСКА ЗЕМЛИ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2015 |
|
RU2589770C1 |
| US 2021302720 A1, 30.09.2021 | |||
| US 2022366605 A1, 17.11.2022. | |||

