Изобретение относится к технике измерения расхода и может быть использовано для измерения малых расходов и объемов жидкостей, например, при испытаниях двигателей, работающих на жидком топливе, при особо малых рабочих расходах и/или при импульсной подаче топлива малыми дозами.
Известен способ измерения расхода жидкости, основанный на определении отношения объема жидкости, вытесняемой из калиброванной мерной емкости постоянного сечения, к времени вытеснения (измерения) (Патент РФ №2505788, МКИ G01F 11/02, опубл. 27.01.2014). Для определения объема вытесненной жидкости измеряют разность давлений, создаваемых столбом жидкости в мерной емкости и дополнительной (сравнительной) емкости в начале и конце интервала измерения, по разности давлений вычисляют разность уровней и рассчитывают объем вытесненной жидкости как произведение разности уровней на площадь поперечного сечения мерной емкости и расход как частное от деления объема на время вытеснения. Описанный способ имеет недостаточную разрешающую способность при вычислении разности уровней. Так, при начальной высоте столба жидкости 1 м и погрешности датчика разности давлений ±0,2% разрешающая способность составляет 2 мм. При этом невозможно измерить расход при подаче короткими импульсами, когда количество израсходованной за импульс жидкости приводит к изменению уровня, меньшего 2 мм.
Более высокую точность измерений обеспечивает способ, выбранный в качестве прототипа, согласно которому периодически посылают через жидкость вдоль перпендикуляра к поверхности раздела «газ/жидкость» ультразвуковые зондирующие сигналы, принимают ультразвуковые сигналы, отраженные от поверхности раздела, формируют по передним фронтам сигналов возбуждения и приема начальный и конечный импульсы запаздывания, определяют скорость звука в контролируемой жидкости, например, путем измерения ее температуры или с помощью специального эталонного акустического канала, вычисляют начальный и конечный уровни жидкости как произведения скорости звука на длительность соответствующего импульса запаздывания и вычисляют разность конечного и начального уровней (Приборостроение и средства автоматики. Справочник в пяти томах. Под общей редакцией проф., д-ра техн. наук А.Н. Гаврилова. Том 2, книга И. Изд-во «Машиностроение», Москва, 1964, стр. 261-263). Возбуждение и прием ультразвуковых импульсов обычно осуществляется с помощью одного и того же обратимого пьезоэлектрического преобразователя. Для улучшения условий распространения звуковой энергии применяют ее канализацию путем установки соосно с пьезопреобразователем вертикальной трубки, сообщающейся с основной емкостью через отверстие в стенке трубки. Диаметр трубки приблизительно равен диаметру излучающей поверхности пьезопреобразователя. При измерении малых расходов указанная трубка одновременно является мерной емкостью, и отверстие в стенке не делают. Трубка должна иметь постоянную по высоте площадь поперечного сечения и быть калиброванной, т.е. ее диаметр должен быть измерен с высокой точностью. Пьезопреобразователь представляет собой резонансную систему, поэтому приемный сигнал имеет форму отрезка синусоиды, частота которой равна резонансной частоте пьезопреобразователя, с затянутыми передним и задним фронтами. Для фиксации момента прихода отраженного сигнала используется пороговое устройство, настроенное на одну из полуволн переднего фронта импульса. Разрешающая способность способа определяется точностью формирования и измерения длительности импульса запаздывания. При скорости звука 1000 м/с и резонансной частоте пьезопреобразователя 1-2 МГц длина звуковой волны составляет 0,5-1 мм, и погрешность измерения уровня может составлять, теоретически, десятые доли миллиметра.
Недостаток описанного способа состоит в том, что поскольку поверхность раздела «газ/жидкость» при опорожнении мерной емкости колеблется из-за прилипания жидкости к стенкам емкости, амплитуда сигнала приема также случайным образом колеблется вокруг среднего значения из-за отклонения и рассеяния отраженного луча. При этом амплитуда полуволны, на которую настроено пороговое устройство, может уменьшаться настолько, что пороговое устройство будет срабатывать по следующей полуволне переднего фронта сигнала приема. Длительность импульса запаздывания при этом скачком изменяется на величину, равную периоду частоты заполнения видеоимпульса, т.е. 0,5-1 мм, внося соответствующую погрешность в измерения разности уровней. В связи с этим погрешность измерения уровня, указываемая в документации на ультразвуковые уровнемеры, обычно составляет 1-2 мм.
Целью предлагаемого способа является расширение диапазона измерений в область малых расходов (объемов) и повышение надежности измерений.
Указанная цель достигается тем, что в способе измерения расхода жидкости, согласно которому периодически посылают через жидкость перпендикулярно поверхности раздела «газ/жидкость» ультразвуковые зондирующие сигналы, принимают ультразвуковые сигналы, отраженные от поверхности раздела, измеряют скорость звука, вычисляют разность уровней в начале и конце измерительного интервала путем сопоставления параметров зондирующего и приемного сигналов с учетом величины скорости звука, вычисляют объем вытесненной жидкости по разности уровней и вычисляют отношение объема вытесненной жидкости к времени вытеснения, зондирующие сигналы получают путем формирования из непрерывного сигнала опорного генератора последовательности радиоимпульсов возбуждения и их преобразования в ультразвуковые сигналы, одновременно с радиоимпульсами возбуждения формируют импульсы строба, измеряют сдвиг фаз импульса приема относительно сигнала опорного генератора на интервале строба, строят график изменения сдвига фаз во времени Δϕ(t) и определяют разность уровней в соответствии с выражением:

где:
n - количество экстремумов на графике Δϕ(t), выявленных на интервале измерений;
ΔϕH - значение сдвига фаз в начале измерительного интервала;
ΔϕK - значение сдвига фаз в конце измерительного интервала;
ΔϕВП - верхний предел измерений сдвига фаз;
с - скорость звука в жидкости;
ƒ - частота опорного сигнала,
при этом период посылки зондирующих сигналов устанавливают равным (4-6) значениям времени задержки, длительность зондирующего сигнала устанавливают равной минимальному времени запаздывания зондирующего сигнала в жидкости τmin=2Hmin/c, где Hmin - минимальная допускаемая высота столба жидкости в мерной емкости, длительность строба выбирают кратной периоду сигнала опорного генератора, интервал между импульсами возбуждения и строба устанавливают равным максимальному времени запаздывания зондирующего сигнала в жидкости τmax=2Hmax/с, где Hmax - максимальная допускаемая высота столба жидкости в емкости, а площадь поперечного сечения мерной емкости S выбирают из соотношения:

где QMAX - максимальный измеряемый расход, τП - интервал между импульсами возбуждения.
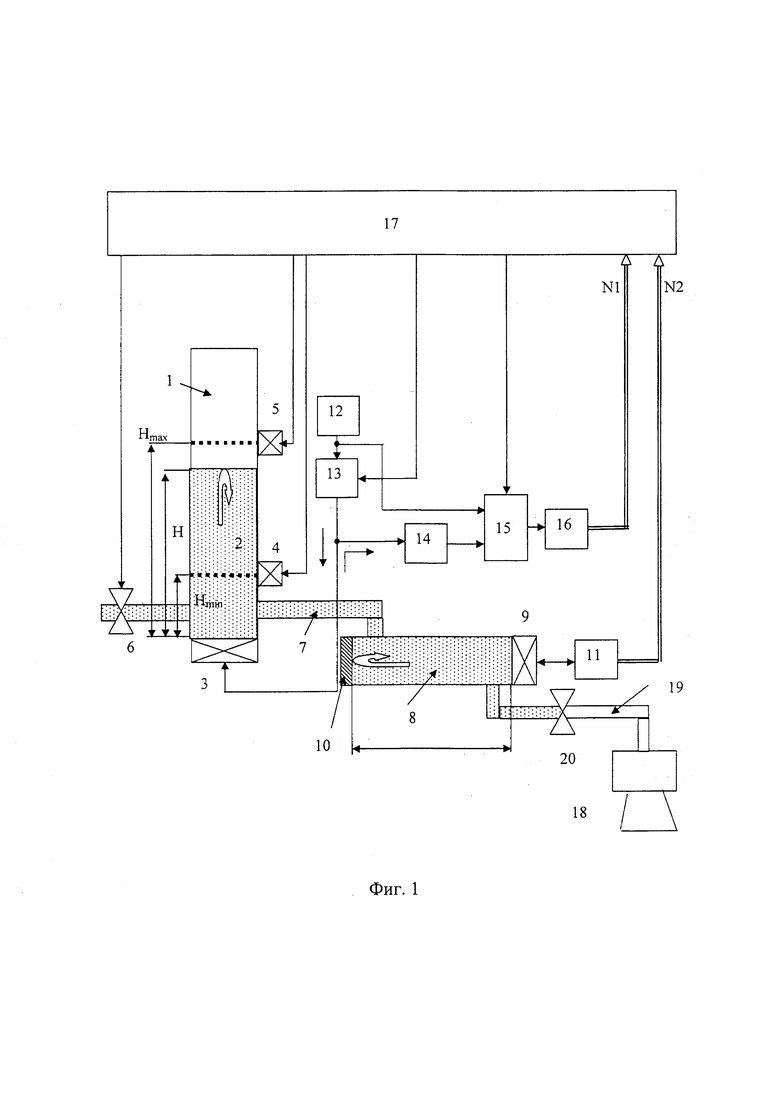
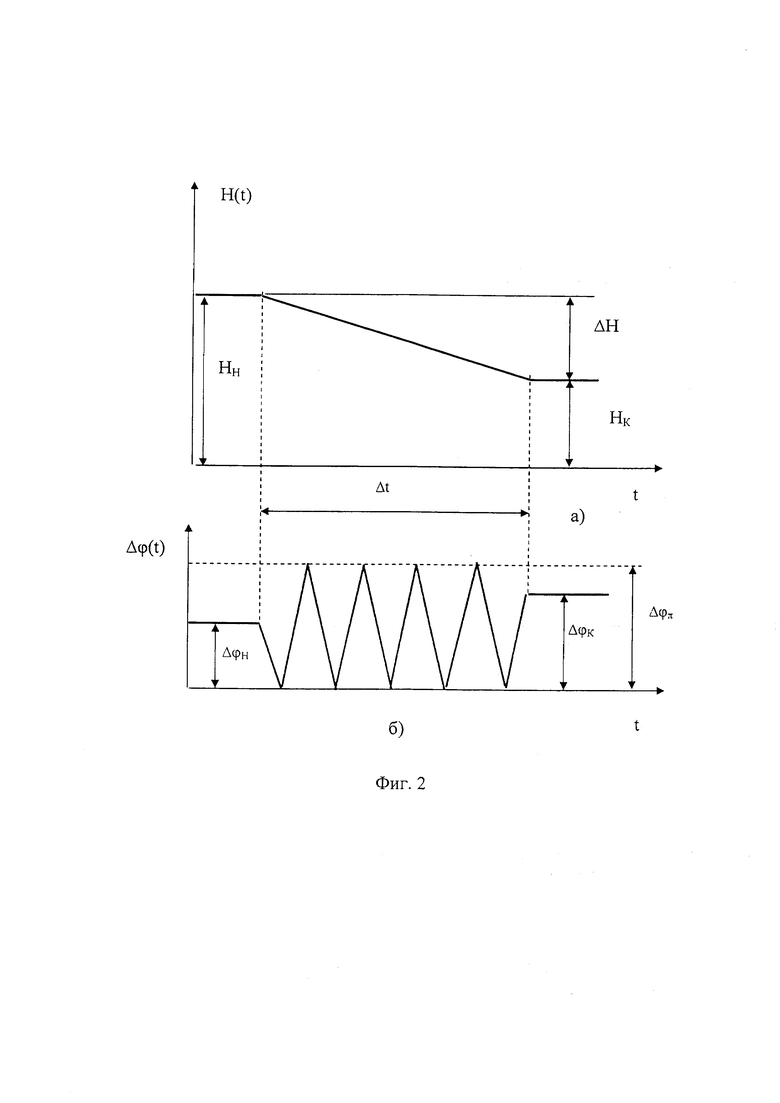
На рисунках представлены: на фиг. 1 - схема устройства для осуществления способа измерения расхода в соответствии с изобретением, на фиг. 2а - график изменения во времени уровня при импульсной подаче жидкости, на фиг. 2б - расчетный график соответствующего изменения во времени разности фаз зондирующего и приемного сигналов при использовании фазометра, построенного по схеме «исключающее ИЛИ», на фиг. 3 - полученная экспериментально форма выходного сигнала измерителя сдвига фаз при постоянном расходе, на фиг. 4 - форма выходного сигнала измерителя сдвига фаз при импульсном изменении расхода.
Устройство (фиг. 1) содержит калиброванную мерную емкость постоянного сечения в виде трубки малого диаметра 1, частично заполненную контролируемой жидкостью 2, первый пьезопреобразователь 3, сигнализатор нижнего предельного уровня 4, сигнализатор верхнего предельного уровня 5, заправочный клапан 6, соединенный с мерной емкостью 1 трубкой 7 эталонный акустический канал, включающий измерительный участок 8, второй пьезопреобразователь 9, отражатель 10 и схему измерения времени задержки 11, генератор опорного сигнала ультразвуковой частоты 12, ключ 13, усилитель-формирователь 14, схему измерения сдвига фаз 15, преобразователь «сдвиг фаз - число» 16, микроконтроллер 17, исследуемый объект 18, соединенный с эталонным каналом трубкой 19, и клапан 20, управляющий поступлением жидкости в исследуемый объект 18 по командам, поступающим от системы управления.
Устройство работает следующим образом. До начала измерений мерная емкость 1 заполнена жидкостью 2 до уровня Hmin, при котором срабатывает сигнализатор нижнего предельного уровня 4 (эталонный канал всегда заполнен жидкостью). Для подготовки устройства к измерениям открывают заправочный клапан 6, и в мерную емкость 1 начинает поступать жидкость 2, вследствие чего уровень в емкости 1 повышается. По достижении отметки Hmax срабатывает сигнализатор верхнего предельного уровня 5 и заправочный клапан 6 закрывается. При открытии клапана 20 исследуемого устройства 18 появляется расход и уровень Н в мерной емкости 1 начинает понижаться.
Измерение расхода и объема выработанной жидкости осуществляется следующим образом. С выхода ключа 13 на первый пьезопреобразователь 3 поступает сигнал возбуждения - радиоимпульс, сформированный из непрерывного сигнала опорного генератора 12. Пьезопреобразователь 3 преобразует сигнал возбуждения в ультразвуковой импульс, который проходит через жидкость 2, отражается от поверхности раздела «газ/жидкость» и поступает на тот же пьезопреобразователь 3, которым преобразуется в электрический сигнал приема, также имеющий форму радиоимпульса. Время запаздывания сигнала в жидкости τ составляет

где:
Н - высота столба жидкости (уровень);
с - скорость звука в жидкости, а набег фазы по отношению к опорному сигналу составляет:

Во избежание наложения на сигнал приема двукратно отраженного сигнала длительность зондирующего сигнала выбирают равной минимальному времени запаздывания зондирующего сигнала в жидкости

где Hmin - минимальная высота столба жидкости в мерной емкости.
Поскольку в пространстве между первым пьезопреобразователем 9 и поверхностью раздела «газ/жидкость» имеют место многократные отражения ультразвукового сигнала, интервал времени между очередными посылками зондирующих сигналов должен превышать время затухания отраженных сигналов. Опыт показывает, что количество отражений до их полного затухания не превышает 4-6, т.е. период посылок τn должен составлять (4-6)τmax, где

и Hmax - максимальная высота столба жидкости в емкости.
Сигнал приема поступает на усилитель-формирователь 14, которым преобразуется в пачку прямоугольных импульсов, следующих с частотой ƒ, причем фронты импульсов совпадают с нуль-переходами сигнала приема. Сигнал с выхода усилителя-формирователя 14 и опорный сигнал генератора 12 поступают на входы схемы измерения сдвига фаз 15, на третий вход которой поступает импульс строба. Длительность строба устанавливают кратной периоду опорного сигнала T=1/ƒ (минимальная длительность импульса строба равна 7), а начало строб-импульса устанавливают через интервал времени, равный τmax. На выходе схемы измерения сдвига фаз 15 формируется сигнал, пропорциональный сдвигу фаз сигнала приема и опорного сигнала. При построении схемы измерения сдвига фаз на основе элемента «исключающее ИЛИ», обладающего повышенной помехоустойчивостью, указанный сигнал имеет вид, представленный на фиг. 2б. С помощью преобразователя 16 сдвиг фаз преобразуется в цифровой код, который поступает на микроконтроллер 17. Микроконтроллер строит график зависимости сдвига фаз от времени Δϕ(t). При импульсном включении объекта испытаний 18 на время Δt уровень изменяется так, как показано на фиг. 2а, а сдвиг фаз Δϕ(t) - как показано на фиг. 2б. Для иллюстрации на фиг. 3 и 4 приведена полученная экспериментально форма выходного сигнала схемы измерения сдвига фаз 15: на фиг. 3 - при постоянном расходе, на фиг. 4 при импульсном изменении расхода.
График Δϕ(t) представляет собой целое число n «полузубцов» (один из них заштрихован) плюс два неполных полузубца в начале и конце, которым соответствуют значения сдвига фаз ΔϕН в начале интервала измерений и ΔϕК - в конце интервала. Один «полузубец» соответствует сдвигу фаз π (180°). Подсчет числа полузубцов сводится к определению количества экстремумов (минимумов и максимумов) на графике Δϕ(t): число полузубцов равно числу экстремумов минус один. Поскольку зондирующий сигнал проходит через жидкость 2 раза (в прямом и обратном направлениях), то изменение сдвига фаз на π соответствует изменению уровня жидкости на четверть длины волны π/4=c/4ƒ. Отсюда следует, что изменение уровня ΔН составляет

Для определения фигурирующей в (5) величины скорости звука с на второй пьезопреобразователь 9 подаются зондирующие импульсы, которые отражаются от отражателя 10 и поступают на тот же преобразователь 9. Время задержки сигнала в эталонном акустическом канале длины HK, составляющее 2HK/с, измеряется с помощью схемы 11 и поступает в микроконтроллер 17. Благодаря тому, что отражающая поверхность неподвижна, все полуволны переднего фронта сигнала приема имеют стабильную амплитуду, что позволяет обеспечить устойчивую работу порогового устройства и измерять время задержки с требуемой точностью.
Объем вытесненной жидкости ΔW, соответствующий изменению уровня ΔН, равен

откуда средний расход Q за время измерения Δt составляет

По двум смежным показаниям описанного устройства может быть вычислен также мгновенный расход.
Для надежного выявления экстремумов и получения хорошей разрешающей способности число измерений при изменении сдвига фаз на π должно составлять не менее 10. Для этого необходимо, чтобы время, в течение которого сдвиг фаз изменяется на π, было в 10 раз больше периода посылки зондирующих сигналов τn. Так как скорость изменения уровня в мерной емкости VH равна

где:
Q - объемный расход;
S - площадь поперечного сечения мерной емкости,
то за время между посылками зондирующих сигналов уровень смещается на расстояние τП⋅VH. Соответственно, это расстояние должно быть в 10
раз меньше четверти длины волны, откуда вытекает условие:

где QMAX - максимальный измеряемый расход.
Расчет показывает, что условие (9) может быть выполнено.
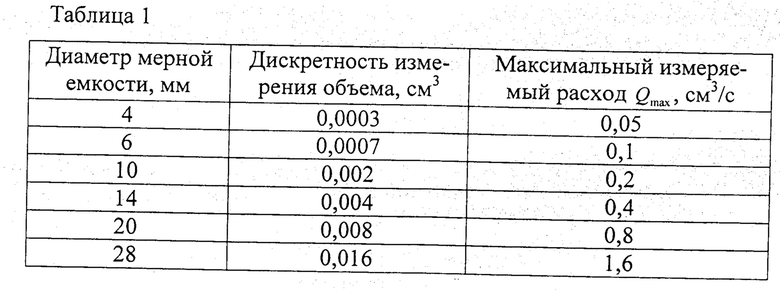
При скорости звука с=1000 м/с и несущей частоте зондирующего сигнал ƒ=1 МГц изменение уровня, приводящее к изменению сдвига фаз на π, составляет четверть длины волны π/4=0,25 мм. Поскольку при этом получают не менее 10 измерений, то минимальное изменение уровня между двумя последовательными измерениями (разрешающая способность) составляет не более 0,025 мм, что позволяет измерять весьма малые расходы (объемы). В таблице 1 приведены результаты расчета дискретности измерения объема и максимального измеряемого расхода для разных диаметров мерной емкости.
Колебания зеркала жидкости в мерной емкости и обусловленные ими колебания амплитуды сигнала приема не влияют на работу измерителя, поскольку сдвиг фаз определяется по нуль-переходами сигнала приема, расположение которых внутри импульса строба не зависит от амплитуды сигнала приема.
Таким образом, предлагаемый способ обеспечивает по сравнению с прототипом повышение разрешающей способности и, соответственно, уменьшение нижнего предела измеряемых объемов на один-два порядка, а также повышение надежности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ | 2010 |
|
RU2436050C1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 1997 |
|
RU2106603C1 |
| Устройство для измерения скорости ультразвука | 1985 |
|
SU1384959A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДА КОМПОНЕНТОВ ДВУХФАЗНОГО ПОТОКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339915C1 |
| Вихреакустический расходомер | 2017 |
|
RU2653776C1 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| Способ определения сопротивления излучения пьезокерамического преобразователя и устройство для его осуществления | 1989 |
|
SU1755170A1 |
| СПОСОБ РАДИОАКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2000 |
|
RU2196345C2 |
| ВИХРЕВОЙ РАСХОДОМЕР | 2012 |
|
RU2515129C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЛЬТРАЗВУКОВОЙ СИГНАЛИЗАТОР | 1999 |
|
RU2175437C2 |

Изобретение относится к способу измерения расхода жидкости и основано на определении скорости изменения уровня жидкости в мерной емкости постоянного сечения. Способ включает следующие операции: периодическую посылку через жидкость перпендикулярно поверхности раздела «газ/жидкость» ультразвуковых зондирующих сигналов, формируемых из непрерывного сигнала опорного генератора; прием ультразвуковых сигналов, отраженных от поверхности раздела «газ/жидкость»; непрерывное измерение сдвига фаз радиоимпульса приема относительно сигнала опорного генератора; построение графика изменения сдвига фаз во времени - Δϕ(t); определение по графику разности уровней в начале и конце измерительного интервала в соответствии с выражением:

где: n - количество экстремумов на графике Δϕ(t), выявленных на интервале измерений; ΔϕH - значение сдвига фаз в начале измерительного интервала; ΔϕК - значение сдвига фаз в конце измерительного интервала; ΔϕВП - верхний предел измерений сдвига фаз; с - скорость звука в жидкости; ƒ - частота опорного сигнала; измерение времени изменения уровня; вычисление скорости изменения уровня как частного от деления разности уровней на время изменения уровня; вычисление расхода как произведения площади поперечного сечения мерной емкости на скорость изменения уровня. Технический результат - увеличение разрешающей способности и повышение надежности измерений. 4 ил.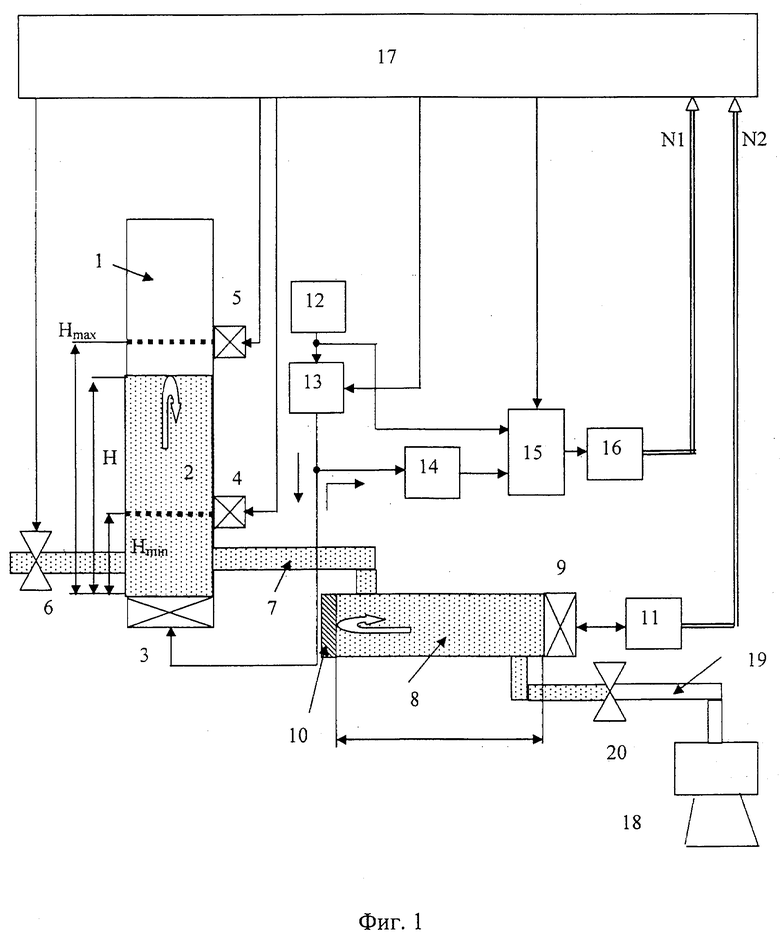
Способ измерения расхода жидкости, согласно которому периодически посылают через жидкость перпендикулярно поверхности раздела «газ/жидкость» ультразвуковые зондирующие сигналы, принимают ультразвуковые сигналы, отраженные от поверхности раздела, измеряют скорость звука, вычисляют разность уровней в начале и конце измерительного интервала путем сопоставления параметров зондирующего и приемного сигналов с учетом величины скорости звука, вычисляют объем вытесненной жидкости по разности уровней и вычисляют отношение объема вытесненной жидкости к времени вытеснения, отличающийся тем, что, с целью увеличения разрешающей способности и повышения надежности измерений, зондирующие сигналы получают путем формирования из непрерывного сигнала опорного генератора последовательности радиоимпульсов возбуждения и их преобразования в ультразвуковые сигналы, одновременно с радиоимпульсами возбуждения формируют импульсы строба, измеряют сдвиг фаз импульса приема относительно сигнала опорного генератора на интервале строба, строят график изменения сдвига фаз во времени Δϕ(t) и определяют разность уровней в соответствии с выражением:

где:
n - количество экстремумов на графике Δϕ(t), выявленных на интервале измерений;
ΔϕH - значение сдвига фаз в начале измерительного интервала;
ΔϕK - значение сдвига фаз в конце измерительного интервала;
ΔϕВП - верхний предел измерений сдвига фаз;
с - скорость звука в жидкости;
ƒ - частота опорного сигнала,
при этом период посылки зондирующих сигналов устанавливают равным 4-6 значениям времени задержки, длительность зондирующего сигнала устанавливают равной минимальному времени запаздывания зондирующего сигнала в жидкости τmin=2Hmin/c, где Hmin - минимальная допускаемая высота столба жидкости в мерной емкости, длительность строба выбирают кратной периоду сигнала опорного генератора, интервал между импульсами возбуждения и строба устанавливают равным максимальному времени запаздывания зондирующего сигнала в жидкости τmax=2Hmax/с, где Hmax - максимальная допускаемая высота столба жидкости в емкости, а площадь поперечного сечения мерной емкости S выбирают из соотношения:

где QMAX - максимальный измеряемый расход, τП - интервал между импульсами возбуждения.
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ | 2012 |
|
RU2505788C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ПОТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2284015C2 |
| CN 202885879 U, 17.04.2013 | |||
| Конденсаторная система зажигания | 1990 |
|
SU1798529A1 |
