Заявленное решение относится к измерительной технике, а именно к устройствам для проведения контроля и измерения параметров систем, входящих в состав прицельно-навигационного пилотажного комплекса самолета, в частности для проверки управляющего вычислительного комплекса (УВК), цифровой вычислительной машины (ЦВМ) из состава УВК и автономной системы контроля пилотажно-навигационного комплекса, а также проверки работоспособности и поиска и устранения неисправностей, возникающих в процессе эксплуатации.
Известно устройство контроля пилотажно-навигационного комплекса (патент РФ №2440595, «Способ и устройство контроля пилотажно-навигационного комплекса» 2010 г., МКИ G05B 23/00, патентообладатель ГОУ ВПО "Санкт-Петербургский государственный университет аэрокосмического приборостроения"), которое содержит сумматоры, схемы вычитания, функциональные преобразователи, преобразователи координат и компараторы, соединенные так, что выходные сигналы блока датчиков абсолютных угловых скоростей аппарата сравниваются с оценками этих скоростей, вычисленными по сигналам датчиков широты, долготы, курса, рыскания, крена, тангажа комплекса. Отличие оценок угловых скоростей от их измеренных значений на компараторах устройства служит для фиксации отказа пилотажно-навигационного комплекса. Недостатком известного решения является, ограниченные функциональные возможности по номенклатуре проверок и невысокая достоверность контроля систем пилотажно-навигационного комплекса.
Наиболее близким решением, взятым в качестве прототипа является устройство контроля пилотажно-навигационного комплекса (патент РФ №2658538, «Способ и устройство контроля пилотажно-навигационного комплекса» 2016 г., МКИ G05B 23/00, патентообладатель ГОУ ВПО "Санкт-Петербургский государственный университет аэрокосмического приборостроения"), которое содержит датчики путевой и воздушной скорости, датчик угла сноса, семь сумматоров, три схемы вычитания, датчик курса, задатчик угла карты, два преобразователя координат, две ячейки памяти, два переключателя, два интегратора, два задатчика координат, индикатор, задатчик ветра, два функциональных преобразователя, два компаратора, логическую схему ИЛИ, соединенные определенным образом. Преобразователь координат содержит два функциональных преобразователя, два умножителя. Недостатком известного решения является отсутствие возможности обеспечения объектов контроля всей необходимой номенклатурой напряжений и невозможность выполнения проверок в лаборатории (автономно) при имитации подсистем пилотажно-навигационного комплекса (ПНК) или прицельно-навигационного пилотажного комплекса (ПНПК), в частности, для проверки управляющего вычислительного комплекса (УВК), цифровой вычислительной машины (ЦВМ) из состава УВК, автономной системы контроля пилотажно-навигационного комплекса и других.
Технической проблемой, на устранение которой направлено заявленное решение, является расширение функциональных возможностей контрольно-проверочного комплекса для проверки систем прицельно-навигационного пилотажного комплекса самолета.
Техническая проблема решается за счет того, что контрольно-проверочный комплекс систем прицельно-навигационного пилотажного комплекса самолета содержит компьютер промышленный с программным обеспечением, соединенный с преобразователем интерфейсов, который по входам и выходам соединен с блоком измерительным, блоком контроля и управления, блоком контроля и измерения и блоком коммутации и контроля, содержащим узел коммутации, узел измерений, формирователь напряжения и трансформатор, при этом узел коммутации по входам соединен с формирователем напряжения и трансформатором, а по выходам соединен с узлом измерений, блоком контроля и измерения, блоком контроля и управления и блоком измерительным. А также за счет того, что источники питания могут быть подключены ко входам объекта контроля через узел коммутации и трансформатор блока коммутации и контроля или через узел коммутации и трансформатор и через блок контроля и измерения или через узел коммутации и трансформатор и через блок контроля и управления, а объект контроля по входам-выходам соединен с блоком измерительным, блоком контроля и управления, блоком контроля и измерения.
Технический результат решения заключается в расширение функциональных возможностей и в повышении надежности и точности результатов комплексной проверки параметров проверяемого оборудования во всех режимах функционирования, снижении трудоемкости и времени проверки, возможности проведения полуавтоматических проверок, что достигается за счет создания контрольно-проверочного комплекса для проведения проверок составных систем прицельно-навигационного пилотажного комплекса самолета в полуавтоматическом режиме. Заявленный контрольно-проверочный комплекс посредством программно-математического обеспечения, реализующего алгоритм работы, используя базу данных тестов, в соответствии с техническими условиями на объект проверки, формирует совокупность сигналов. Каждой совокупности тестовых сигналов соответствует совокупность эталонных сигналов на выходах объектов проверки. Заявленная конструкция блока коммутации и контроля обеспечивает имитацию бортового электропитания управляющего вычислительного комплекса (УВК), цифровой вычислительной машины (ЦВМ) из состава УВК и автономной системы контроля пилотажно-навигационного комплекса. В зависимости от объекта контроля источники питания подключаются к его входу либо через узел коммутации и трансформатор с выхода блока коммутации и контроля (для проверки УВК), либо через узел коммутации и трансформатор с выхода блока коммутации и контроля через блок контроля и управления (для проверки ЦВМ из состава УВК), либо через узел коммутации и трансформатор с выхода блока коммутации и контроля чрез блок контроля и измерения (для проверки автономной системы контроля ПНКП). Технический результат заключается также в возможности ведения электронной базы данных проверок. Диагностика и проверка оборудования осуществляется в полуавтоматическом режиме, с помощью программного обеспечения, что обеспечивает высокую точность контроля качества оборудования и диагностику неисправностей его, а также позволяет уменьшить влияние человеческого фактора на точность измерений и сократить затраты времени на проверку работоспособности оборудования.
Контрольно-проверочный комплекс обеспечивает решение следующих задач:
- испытание, диагностика, контроль и измерения параметров проверяемого оборудования, устанавливаемого на самолеты типа Ил-76(М, МД), при выполнении их технического обслуживания и проверки на соответствие НТП в лаборатории в соответствии с технологическими указаниями по их проверке, руководствами по технической эксплуатации и регламентом технического обслуживания вышеуказанных самолетов;
- сбор, обработка и хранение результатов испытаний, диагностики, контроля и измерения параметров испытуемого оборудования;
- автоматизированное управление процессом испытаний, диагностики, контроля и измерений параметров испытуемого оборудования;
- выдачи результатов испытаний, диагностики, контроля и измерения параметров испытуемого оборудования на бумажный носитель.
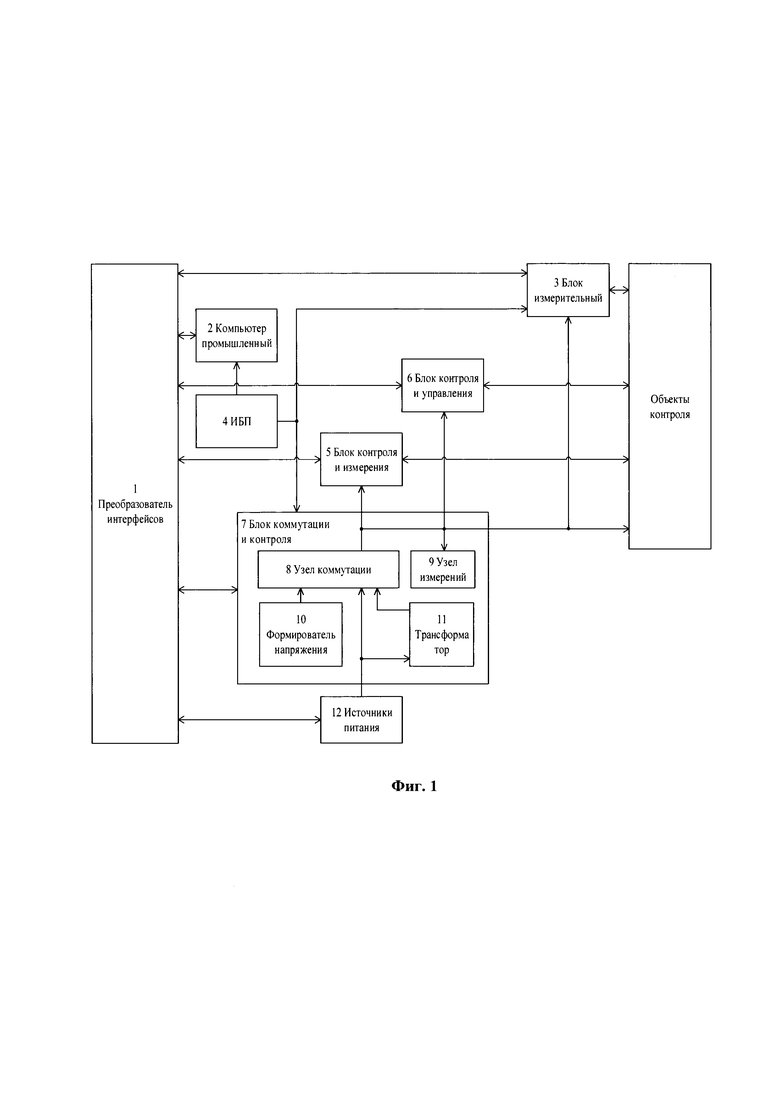
Заявленное решение поясняется чертежом, где представлена блок-схема устройства, на которой позициями обозначены: 1 - преобразователь интерфейсов, 2 - компьютер промышленный, 3 - блок измерительный (БИ), 4 - источник бесперебойного питания (ИБП), 5 - блок контроля и измерения (БКИ), 6 - блок контроля и управления (БКУ), 7 -блок коммутации и контроля (БКК), 8 - узел коммутации, 9 - узел измерений, 10 - формирователь напряжения, 11 - трансформатор, 12 - источники питания.
Контрольно-проверочный комплекс (далее - комплекс) для проведения контроля и измерения параметров подсистем, входящих в состав прицельно-навигационного пилотажного комплекса (далее - ПНКП) самолета, содержит компьютер промышленный 2 соединенный с преобразователем интерфейсов 1, который соединен с источниками питания 12, блоком коммутации и контроля (БКК) 7, блоком измерительным (БИ) 3, блоком контроля и управления (БКУ) 6 и блоком контроля и измерения (БКИ) 5. Общее питание комплекса осуществляется от промышленной сети питания, которое подается на преобразователь интерфейсов 1, источники питания 12 и на ИБП 4, через который к сети питания подключен компьютер промышленный 2, БКК 7 и БИ 3. Блок коммутации и контроля БКК 7 состоит из узла коммутации 8, узла измерений 9, формирователя напряжений 10 и трансформатора 11. Источники питания 12 через блок коммутации 8 и через трансформатор 11 напрямую с выхода БКК 7 и через БКИ 5, БКУ 6, БИ 3 подключаются к входам объектов контроля. Выход узла коммутации 8 подключен к входу узла измерений 9. Формирователь напряжения 10 подключен к узлу коммутации 8. Входы-выходы объектов контроля подключаются к БИ 3, БКУ 6 и БКИ 5.
Компьютер промышленный 2 с программным обеспечением предназначен для управления составными частями комплекса, обработки и хранения данных, полученных в процессе проверки, вывода информации о ходе проверки. Источники питания 12 представляют из себя два отдельных программируемых источника питания и трансформатор и обеспечивают питание объектов контроля напряжением постоянного тока 27 В с возможностью формирования произвольного значения в диапазоне от 24,3 до 29,7 В, и переменного тока 115/200 В 400 Гц с возможностью формирования в диапазоне от 95/165 В до 130/225 В 400 Гц.
Преобразователь интерфейсов 1 предназначен для передачи команд управления, поступающих от компьютера промышленного к БКК 7, БИ 3, БКУ 6, БКИ 5 по интерфейсу RS-485 и источникам питания 12 по интерфейсу RS-232.
Блок коммутации и контроля (БКК) 7 в качестве входных сигналов получает от компьютера промышленного 2 через преобразователь интерфейсов 1 управляющие сигналы интерфейса RS-485, а от источников питания 12:
- напряжение постоянного тока 27 В;
- напряжение переменного тока 115/200 В частотой 400 Гц.
БКК 7 по командам интерфейса RS-485 поступающим от компьютера промышленного 2 осуществляет коммутацию указанных выше напряжений на выходные разъемы жгутов, подключаемых к объектам контроля, БКИ 5, БКУ 6 и БИ 3, а также осуществляет формирование и коммутацию регулируемого напряжения переменного тока 36 В 400 Гц. БКК 7 измеряет формируемые и коммутируемые напряжения, выполняет проверку собственной работоспособности и по командам интерфейса RS-485 передает эту информацию в компьютер промышленный 2. Узел коммутации 8 осуществляет коммутацию напряжений на выходные разъемы жгутов, подключаемые к объектам контроля, БКИ 5, БКУ 6 и БИ 3. Узел измерений 9 осуществляет контроль и измерение коммутируемых и формируемых напряжений, и передает эту информацию в компьютер промышленный 2. Формирователь напряжения 10 формирует регулируемое напряжение переменного тока 36 В 400 Гц и передает его на узел коммутации 8. Трансформатор 11 изолирует одну фазу напряжения переменного тока 115 В 400 Гц источников питания 12 и передает ее на узел коммутации 8.
Блок измерительный (БИ) 3 предназначен для формирования сигналов, имитирующих работу подсистем необходимых для проверки УВК. БИ 3 в качестве входных сигналов получает от компьютера промышленного 2 через преобразователь интерфейсов 1 управляющие сигналы интерфейса RS-485, от БКК 7 - напряжение постоянного тока 27 В, напряжения переменного тока 36 В 400 Гц и 115/200 В 400 Гц и формирует сигналы:
- напряжение переменного тока в диапазоне от 0 до 36 В частотой 400 Гц;
- напряжение постоянного тока в диапазоне от минус 6,3 до 28 В;
- импульсные сигналы положительной полярности с амплитудой 5 В;
- логические сигналы в виде напряжений постоянного тока с уровнями логического нуля и единицы с номинальным значением 0 и 27 В.
БИ 3 осуществляет контроль параметров сигналов, поступающих от проверяемых объектов контроля, таких как:
- напряжение переменного тока в диапазоне от 0 до 60 В частотой 400 Гц;
- напряжение постоянного тока в диапазоне от минус 30 до 30 В;
- напряжение логических сигналов с номинальным уровнем напряжения постоянного тока логического нуля и едины равным 0 и 27 В.
Формируемые напряжения выдаются в УВК для проверки его работоспособности и проверки на соответствие заявленными нормам технического параметра (НТП) и являются сигналами управляющего воздействия на проверяемые объекты контроля. Поступающие от УВК контролируемые сигналы напряжений постоянного и переменного тока являются оцениваемым результатом работы УВК как результат подачи на него управляющих воздействий от БИ 3 в необходимой последовательности. БИ 3 по командам интерфейса RS-485 поступающим от компьютера промышленного 2 формирует указанные выше напряжения на выходные разъемы жгутов, подключаемых к объектам контроля, а также передает в компьютер промышленный 2 измеряемые параметры формируемых им значений напряжений и измеренных значений токов нагрузки. БИ 3 передает измеряемые им параметры входных сигналов от УВК для дальнейшей обработки в компьютере промышленном 2, выполняет проверку собственной работоспособности и по командам интерфейса RS-485 передает эту информацию в компьютер промышленный 2.
Блок контроля и измерения (БКИ) 5 предназначен для формирования сигналов, имитирующих работу подсистем, необходимых для проверки автономной системы контроля ПНКП. БКИ 5 в качестве входных сигналов получает от компьютера промышленного 2 через преобразователь интерфейсов 1 управляющие сигналы интерфейса RS-485, от блока БКК 7 - напряжение постоянного тока 27 В, напряжения переменного тока 115/200 В 400 Гц и формирует сигналы:
- напряжение переменного тока 115/200 В частотой 400 Гц;
- напряжение постоянного тока 27 В;
- напряжение постоянного ток в диапазоне от 6 до 9 мА;
- напряжение постоянного тока в диапазоне от минус 10 до 27 В;
- импульсный сигнал отрицательной полярности с амплитудой от 2 до 4 В;
- логические сигналы в виде напряжений постоянного тока с уровнями логического нуля и единицы с номинальным значением 0 и 27 В, имитирующих работу штатной контрольно-проверочной аппаратуры (КПА) автономной системы контроля ПНКП.
БКИ 5 осуществляет контроль параметров сигналов, поступающих от проверяемых объектов контроля, таких как:
- напряжение переменного тока диапазоне от 0 до 60 В частотой 400 Гц;
- напряжения постоянного тока в диапазоне от минус 30 до 30 В;
- импульсные сигналы отрицательной полярности с амплитудой от 4 до 10 В;
- напряжение логических сигналов с номинальным уровнем напряжения постоянного тока логического нуля и едины равным 0 и 27 В.
Формируемые напряжения выдаются в автономную систему контроля ПНКП для проверки ее работоспособности и проверки на соответствие заявленными НТП и являются сигналами управляющего воздействия на проверяемые объекты контроля. Поступающие от автономной системы контроля ПНКП контролируемые сигналы напряжений постоянного и переменного тока являются оцениваемым результатом работы автономной системы контроля ПНКП, как результат подачи на нее управляющих воздействий от БКИ 5 в необходимой последовательности. БКИ 5 по командам интерфейса RS-485, поступающим от компьютера промышленного 2, формирует указанные выше напряжения на выходные разъемы жгутов, подключаемых к объектам контроля, а также передает в компьютер промышленный 2 измеряемые параметры формируемых им значений напряжений и измеренных значений токов нагрузки. БКИ 5 передает измеряемые им параметры входных сигналов от автономной системы контроля ПНКП для дальнейшей обработки в компьютере промышленном 2, выполняет проверку собственной работоспособности и по командам интерфейса RS-485 передает эту информацию в компьютер промышленный 2.
Блок контроля и управления (БКУ) 6 предназначен для формирования сигналов имитирующих работу блоков УВК необходимых для проверки цифровой вычислительной машины (ЦВМ) из состава УВК. БКУ 6 в качестве входных сигналов получает от компьютера промышленного 2 через преобразователь интерфейсов 1 управляющие сигналы интерфейса RS-485, от блока БКК 7 - напряжение постоянного тока 27 В, напряжения переменного тока 115/200 В 400 Гц и формирует сигналы:
- напряжение переменного тока 115/200 В частотой 400 Гц;
- напряжение постоянного тока 27 В;
- логические сигналы в виде напряжений постоянного тока с уровнями логического нуля и единицы с номинальным значением минус 1,2 и 0 В, имитирующих работу штатной КПА ЦВМ.
БКУ 6 осуществляет контроль параметров сигналов, поступающих от проверяемых объектов контроля, таких как:
- напряжение постоянного тока в диапазоне от минус 20 до 20 В;
- напряжение логических сигналов с номинальным уровнем напряжения постоянного тока логического нуля и едины равным минус 1,2 и 0 В;
- напряжение логических сигналов с номинальным уровнем напряжения постоянного тока логического нуля и едины равным минус 0 и 27 В.
Формируемые напряжения выдаются в ЦВМ для проверки ее работоспособности и проверки на соответствие заявленными НТП и являются сигналами управляющего воздействия на проверяемые объекты контроля. Поступающие от ЦВМ контролируемые сигналы напряжений постоянного тока являются оцениваемым результатом работы ЦВМ как результат подачи на нее управляющих воздействий от БКУ 6 в необходимой последовательности. БКУ 6 по командам интерфейса RS-485 поступающим от компьютера промышленного 2 формирует указанные выше напряжения на выходные разъемы жгутов, подключаемых к объектам контроля, а также передает в компьютер промышленный 2 измеряемые параметры формируемых им значений напряжений и измеренных значений токов нагрузки. БКУ 6 передает измеряемые им параметры входных сигналов от ЦВМ для дальнейшей обработки в компьютере промышленном 2, выполняет проверку собственной работоспособности и по командам интерфейса RS-485 передает эту информацию в компьютер промышленный 2.
ИБП 4 предназначен для формирования на выходных разъемах стабильного напряжения, имитирующего сетевое при пропадании напряжения сети, что необходимо для защиты компьютера промышленного 2, БИ 3 и БКК 7 от перерывов в энергоснабжении, снижения напряжения в сети, кратковременных провалов напряжения и скачков напряжения и тока, а также для корректного завершения работы комплекса и проверяемых объектов контроля в случае пропадания напряжения сети 230 В 50 Гц. Питание сети 230 В 50 Гц подается на преобразователь интерфейсов 1, на источники питания 12 и на ИБП 4.
В зависимости от объекта контроля источники питания подключаются ко входу объекта контроля:
- через узел коммутации 8 и трансформатор 11 с выхода блока коммутации и контроля 7 (для проверки УВК);
- через узел коммутации 8 и трансформатор 11 с выхода блока коммутации и контроля 7 через блок контроля и управления 6 (для проверки ЦВМ из состава УВК);
- через узел коммутации 8 и трансформатор 11 с выхода блока коммутации и контроля 7 чрез блок контроля и измерения 5 (для проверки автономной системы контроля ПНКП).
Пример проверки.
Проверка связи УВК с пилотажно-навигационными системами.
1. Устанавливают блоки УВК на предусмотренные в комплексе рабочие места.
2. Запускают программное обеспечение (ПО) КПК-12.
3. После ввода информации по проверяемому объекту контроля переходят на вкладку проверки и далее, выполняя указания в ПО по подключению жгутов и установке органов управления УВК в исходное положение, подают электропитание на УВК. При этом питающие напряжения, имитирующие бортовую сеть летательного аппарата (+27 В, 36 В 400 Гц, 115/200 В 400 Гц) будут поступать от источников питания 12 через БКК 7 на БКУ 6, БКИ 5, БИ 3, а также на УВК.
4. Затем переходят на вкладку проверок, выбирают проверку связи с пилотажно-навигационными системами и нажимают кнопку «СТАРТ».
5. Производят проверку связи УВК с имитатором точной курсовой системы (ТКС). Следуя указаниям текстового поля ПО, на УВК запускают выполнение проверки параметров ТКС и последовательно вводят устанавливаемые углы ТКС. При этом на УВК будут подаваться сигналы с напряжением от 0 до 36 В частотой 400 Гц, имитирующие угол курса ТКС. По завершении будет осуществлен переход к следующей проверке.
6. Проверка связи УВК с имитатором доплеровского измерителя скорости и сноса (ДИСС). Следуя указаниям текстового поля ПО, запускают на УВК выполнение проверки параметров. При этом на УВК будут подаваться сигналы с напряжением постоянного тока от минус 6,3 до 0 В имитирующие угол сноса, путевую скорость, управляющий сигнал ДИСС величиной 27 В.
7. Проверка связи УВК с имитатором системы воздушных сигналов (СВС). Следуя указаниям текстового поля ПО, запускают на УВК выполнение проверки параметров. При этом на УВК будут подаваться сигналы с напряжением постоянного тока от минус 6,3 до 0 В имитирующие воздушную скорость, относительную высоту и управляющий сигнал СВС величиной 27 В.
8. Проверка связи УВК с имитатором системы автоматического управления (САУ). Следуя указаниям текстового поля ПО, запускают на УВК выполнение проверки параметров. При этом на УВК будут подаваться сигналы с напряжением постоянного тока от минус 10 до 10 В имитирующие сигналы крена, тангажа и управляющие сигналы САУ величиной 27 В.
9. Проверка связи УВК с имитатором радиотехнической системы ближней навигации (РСБН). Следуя указаниям текстового поля ПО, запускают на УВК выполнение проверки параметров. При этом на УВК будут подаваться сигналы с напряжением постоянного тока от минус 5 до 0 В, импульсные стробирующие сигналы амплитудой в 5 В имитирующие сигналы дальности и азимута, управляющие сигналы РСБН величиной 27 В.
10. Проверка связи УВК с имитатором радиотехнической системы дальней навигации (РСДН). Следуя указаниям текстового поля ПО, запускают на УВК выполнение проверки параметров. При этом на УВК будут подаваться сигналы с напряжением постоянного тока от минус 6,3 до 0 В, импульсный стробирующий сигналы амплитудой в 10 В имитирующие сигналы гиперболических координат, управляющие сигналы РСДН величиной 27 В. Все необходимые значения, измеренные во время проведения данной проверки, будут сохранены в базе данных компьютера промышленного.
Комплекс обеспечивает выполнение функций поверки приборов в соответствии с действующей нормативной документацией, сбора, обработки, накопления и хранения результатов проверок, вывода результатов проверок, ведения базы данных по каждому проверяемому объекту контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-проверочный комплекс для анероидно-мембранных приборов | 2020 |
|
RU2738910C1 |
| Контрольно-проверочный комплекс для проверки радиоэлектронного оборудования | 2022 |
|
RU2792292C1 |
| Контрольно-проверочный комплекс | 2020 |
|
RU2755331C1 |
| Контрольно-проверочный комплекс радиолокационных станций самолёта | 2022 |
|
RU2792260C1 |
| Контрольно-проверочный комплекс для проверки радиосвязного и радионавигационного оборудования | 2023 |
|
RU2820263C1 |
| Контрольно-проверочный комплекс для проверки автоматических радиокомпасов | 2020 |
|
RU2748493C1 |
| Контрольно-проверочный комплекс для проверки доплеровских измерителей скорости и сноса | 2018 |
|
RU2676225C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Контрольно-проверочный комплекс проверки автопилота | 2016 |
|
RU2615850C1 |
| СТАЦИОНАРНОЕ УСТРОЙСТВО ДИАГНОСТИКИ ДЛЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ЛОКОМОТИВНЫХ УСТРОЙСТВ БЕЗОПАСНОСТИ | 2014 |
|
RU2550242C1 |
Изобретение относится к измерительной технике, а именно к устройствам для проведения контроля и измерения параметров систем, входящих в состав прицельно-навигационного пилотажного комплекса самолета. Контрольно-проверочный комплекс систем прицельно-навигационного пилотажного комплекса самолета содержит промышленный компьютер с ПО управления составными частями комплекса, а также обработки и хранения данных, полученных в результате проверки, преобразователь интерфейсов, блок измерительный, блок контроля и управления, блок контроля и измерения, блок коммутации и контроля, состоящий из узла коммутации, узла измерений, формирователя напряжения и трансформатора, источник бесперебойного питания и источники питания. При этом промышленный компьютер с ПО соединен с преобразователем интерфейсов, который по входам-выходам соединен с блоком измерительным, блоком контроля и управления, блоком контроля и измерения и блоком коммутации и контроля, а узел коммутации по входам соединен с формирователем напряжения и трансформатором, а по выходам соединен с узлом измерений, блоком контроля и измерения, блоком контроля и управления и блоком измерительным. Источник бесперебойного питания соединен своими выходами с промышленным компьютером, блоком коммутации и контроля, а также блоком измерительным, источники питания соединены своими выходами с входом узла коммутации и входом трансформатора, а своим входом-выходом с преобразователем интерфейсов. При этом контрольно-проверочный комплекс выполнен с возможностью подключения объекта контроля через входы-выходы блока измерительного, блока контроля и управления, блока контроля и измерения и блока коммутации и контроля. Технический результат – расширение функциональных возможностей контрольно-проверочного комплекса для проверки систем прицельно-навигационного пилотажного комплекса самолета. 1 ил.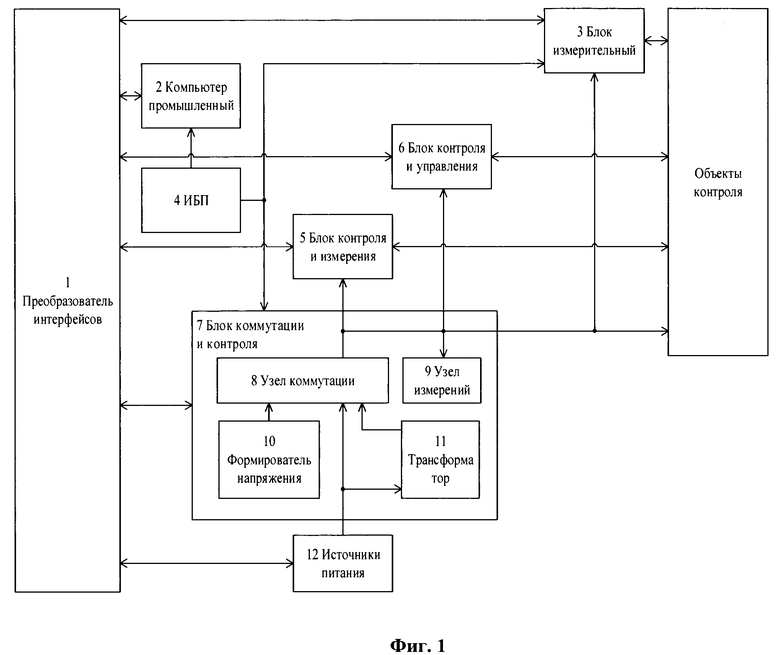
Контрольно-проверочный комплекс систем прицельно-навигационного пилотажного комплекса самолета, содержащий компьютер промышленный с программным обеспечением управления составными частями комплекса, а также обработки и хранения данных, полученных в результате проверки, преобразователь интерфейсов, блок измерительный, блок контроля и управления, блок контроля и измерения, блок коммутации и контроля, состоящий из узла коммутации, узла измерений, формирователя напряжения и трансформатора, источник бесперебойного питания и источники питания, причем компьютер промышленный с программным обеспечением соединен с преобразователем интерфейсов, который по входам-выходам соединен с блоком измерительным, блоком контроля и управления, блоком контроля и измерения и блоком коммутации и контроля, а узел коммутации по входам соединен с формирователем напряжения и трансформатором, а по выходам соединен с узлом измерений, блоком контроля и измерения, блоком контроля и управления и блоком измерительным, источник бесперебойного питания соединен своими выходами с компьютером промышленным, блоком коммутации и контроля, а также блоком измерительным, источники питания соединены своими выходами с входом узла коммутации и входом трансформатора, а своим входом-выходом с преобразователем интерфейсов, при этом контрольно-проверочный комплекс выполнен с возможностью подключения объекта контроля через входы-выходы блока измерительного, блока контроля и управления, блока контроля и измерения и блока коммутации и контроля.
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| Контрольно-проверочный комплекс для проверки доплеровских измерителей скорости и сноса | 2018 |
|
RU2676225C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС РЕГИСТРАЦИИ И СИНТЕЗА РАДИОТЕХНИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2351979C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭЛЕКТРОАГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2009 |
|
RU2402799C1 |
| US 5077671 A1, 31.12.1991. | |||
