Изобретение относится к области комплексного автономного контроля пилотажно-навигационных систем управления летательными аппаратами, и в частности к средствам аппаратурно-безызбыточного контроля ориентации и навигации пилотируемых и беспилотных летательных аппаратов, минимального веса, габаритов, энергопотребления, сложности и стоимости. Оно также может быть использовано для создания простых и высоконадежных средств контроля и резервных каналов пилотажно-навигационных систем современного самолета, защищенных от отказов и сбоев основной многократно резервированной сложной гироинерциальной системы управления.
Известен способ контроля пилотажно-навигационной системы с применением пороговой оценки результатов измерений сигналов комплекса и параметров полета (Беляевский Л.С, Новиков B.C., Олянюк П.В. Обработка и отображение радионавигационной информации. М.: Радио и связь, 1990. с. 114-119; Алтухов В.Ю., Стадник В.Б, Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991. с. 35, 42, 91 и др.). Способ состоит в n-кратном измерении контролируемого параметра, вычислении отношения правдоподобия с учетом среднего риска принятия решения об исправности системы. Для достоверного контроля необходимо иметь точное описание законов распределения всех контролируемых полетных параметров комплекса, что практически невозможно. Усложнение способа, построение оптимального решающего правила при аддитивной связи контролируемых сигналов и погрешностей измерения, приводит к проверке сложных гипотез контроля. Такой контроль при широких диапазонах изменения проверяемых пилотажно-навигационных сигналов рыскания, крена, тангажа, широты, долготы, скорости, координат аппарата крайне затруднен.
Известен и широко применяется способ контроля пилотажно-навигационного комплекса на основе заранее определенных тестов (Богданченко Н.М. Курсовые системы и их эксплуатация, М.: Транспорт, 1983, С. 105; Руководство по технической эксплуатации самолета ИЛ-86. Под ред. С.И. Кузнецова. 2009; Бородин В.Г Рыльский Г.И. Пилотажные комплексы и системы управления самолетов и вертолетов. М.: Машиностроение, 1978. с. 133;. Контроль на земле может проводиться в статическом и динамическом режимах. Статический режим основан на подборе заранее определенных тестов, которые подаются в контролируемые датчики. Реализуется два вида оценки: либо контрольные коды поступают из постоянного запоминающего устройства БЦВМ, а оценка результатов производится визуально по приборам комплекса, либо значения контрольных параметров поступают из датчиков комплекса в БЦВМ, где производится их сравнение с уставками. Входная информация анализируется на совпадение с заданной. Сравнением определяется отказ систем и комплекса. Динамический режим или имитация полета применяется для проверки функционирования программ в БЦВМ. Он производится в реальном или ускоренном масштабе времени. Способ применим для предполетного или регламентного контроля, его применение в полете нарушает нормальное функционирование пилотажно-навигационного комплекса и требует вмешательства летчика.
Известен способ контроля пилотажно-навигационного комплекса самолета ИЛ-86 (Воробьев В.Г., Глухов В.В, Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С. 290, 368, 375; Морозов В.В., Баринова Т.В. Приборное оборудование самолета ИЛ-86 и его эксплуатация. Учебное пособие. Ульяновск: Центр ГА СЭВ, 1989), в котором широко применяется аппаратная избыточность датчиков курса, рыскания, тангажа, крена трех инерциальных курсовертикалей (ИКВ), резервированных блоков датчиков угловых скоростей (БДГ), датчиков скоростей, реализуемый мажоритарными блоками контроля крена (БКК), базовой системой курса и вертикали (БСКВ), блоком формирования команд (БФК). Среднее значение трех одноименных полетных параметров с мажоритарного блока сравнивается с выходными сигналами датчиков и по рассогласованию делается вывод об исправности соответствующего датчика системы. Такой способ обеспечивает достаточно высокую информационную производительность (I1=4 бит/с [1, с. 11-13]) обнаружения отказов пилотажно-навигационного комплекса аэробуса ИЛ-86, где трехкратное увеличения веса, габаритов, энергопотребления, стоимости приборного оборудования вполне допустимо. Однако сложность такого контроля и, как следствие, его низкая надежность и достоверность РД1 обнаружения отказа именно датчиков комплекса, содержащего например типовые элементы: инерциальную курсовертикаль ИКВ-802 (среднее время наработки на отказ ТИКВ==500 час.), бортовую цифровую вычислительную машину БЦВМ80-30301 (среднее время наработки на отказ ТБЦВМ=18000 час) делает его малоэффективным РД1=0,59; ТД1=3,8 час [2, 3]. Достоверность и время достоверного контроля при полетном времени tП=2 часа требуют большого объема регламентных, предполетных работ [4]. Мажоритарный контроль обладает полной автономностью обнаружения отказов. Надежность пилотажно-навигационного комплекса при этом очень велика и составляет ТПНК=12490 час.
Известен способ контроля пилотажно-навигационного комплекса с применением наблюдателей состояния, объединяемых фильтром Калмана или Льюенбергера (Кузовков Н.Т. Системы стабилизации летательных аппаратов. М.: Высшая школа, 1976. с. 191-205; Авиационная радионавигация: Справочник. Под ред. А.А. Сосновского. М.: Транспорт, 1990. с. 30-31). Наблюдатель состояния строится на основе модели объекта контроля и помех, подключенной параллельно и охваченной дополнительной обратной связью по сигналу рассогласования модели и объекта. При этом коэффициент обратной связи выбирается таким образом, чтобы выход модели как можно точнее совпадал с выходом контролируемого пилотажно-навигационного комплекса. Следя за величиной рассогласования, можно осуществить непрерывный контроль за исправностью системы. Основная трудность в реализации способа заключается в определении коэффициента обратной связи по адекватной модели сложного и размерного пилотажно-навигационного комплекса и нестационарных корреляционных функций его случайных помех [5, с. 205; 6, с. 111, 125, 128, 132 и др.].
Известен способ контроля горизонтальной ориентации аппарата (Пат. 2373562 РФ, МКИ G05D 1/08. Способ и устройство контроля горизонтальной ориентации аппарата., опубл. 2009, БИ №32), основанный на измерении величины и направления кажущегося линейного ускорения, с одновременным измерением текущего значения величины и направления абсолютного и кажущегося линейного ускорения аппарата, определении величины и направления разности кажущегося и абсолютного линейных ускорений с последующим определением отношений проекций разности кажущегося и абсолютного линейного ускорения аппарата на продольную ось связанной системы координат к величине ускорения силы тяжести и отношение проекции разности кажущегося и абсолютного линейного ускорения на поперечную ось связанной системы координат к проекции разности кажущегося и абсолютного линейного ускорения на нормальную ось связанной системы координат, с последующим определением контролируемой горизонтальной ориентацией по тангажу и крену, ее сравнением, как и измеряемых проекций величины и направления абсолютной угловой скорости, с выходными параметрами пилотажно-навигационного комплекса. Способ не позволяет контролировать навигационные параметры системы: местоположение объекта, курс, широту, долготу. Достоверность и информационная производительность контроля всего пилотажно-навигационного комплекса сравнительно невелика.
Известен способ-прототип контроля пилотажно-навигационного комплекса (Пат, 2440595 РФ, МКИ G05B 23/00. Способ и устройство для контроля пилотажно-навигационного комплекса. Опубл. 2012, БИ №2). Способ контроля пилотажно-навигационного комплекса основан на измерении величины и направления абсолютной угловой скорости аппарата, величины и направления угловых скоростей крена, тангажа, рыскания аппарата, а также величины и направления угловых скоростей Земли, долготы, широты, курса аппарата. Определяют сумму величин и направлений угловых скоростей Земли, долготы, широты, курса, рыскания, тангажа, крена аппарата, а затем полученную величину и направление суммы сравнивают с величиной и направлением абсолютной угловой скорости аппарата.
Недостатком известного способа-прототипа является контроль угловых движений объекта. В наиболее простой форме он позволяет вести контроль большого числа параметров угловой ориентации современного самолета. Однако он определяет ее неисправности: по текущим линейным перемещениям подвижного объекта на маршруте, погрешности работы навигационных датчиков линейных скоростей самолета относительно Земли и воздушной среды, датчика курса, типовой схемы вычислителя навигационных параметров, что имеет первостепенное значение для безопасности полета.
Известно устройство интегральной распределенной вычислительной системы сбора полетной информации, контроля и диагностики бортовых систем "Регата" (Ратникова Н.А. Распределенная вычислительная система "Регата" - основа технологии контроля воздушных судов по состоянию // Авиакосмическое приборостроение, №7, 2004. С. 44-52 и др.), содержащее приемные модули аналого-цифрового преобразования (АЦП 24, АЦП 32, АЦП ТП, АЦП TP, АЦП И, АЦП 16ПТ, АЦП СКТ М, АЦП ПР М, АЦП ТН), частотные преобразователи (ВИ ЧМ, ВИ СЧ, ЧП), контроллеры межмашинного обмена (RS, ТМТ, КПИ М, РК, КПИ), системные управляющие контроллеры (процессоры 200, 300), твердотельный накопитель с процессором 300, цифровой вычислитель, систему единого времени, выносной пульт управления, устройства установки синхронизации и запросов прерывания. Модульное построение аппаратно-программных средств дает возможность наращивания вычислительных мощностей устройства, сигналы в котором обрабатываются на трех уровнях. Верхний уровень проверяет выполнение взаимосвязей параметров состояния проверяемых систем. Средний уровень экспертных систем анализирует текущую и доопытную информацию об отказах по методам теории нечетких выводов с привлечением знаний специалистов - экипажа. На нижнем уровне для заданного диапазона изменения нормированных сигналов ведется вероятностно-гарантированная оценка состояния исправности приборов с привлечением известных статистических критериев качества. Предполагается, что известны траектория движения ЛА, совокупность контролируемых параметров и их эталонные области значений. Отклонение нормированных контролируемых параметров и эталонных значений в полете статистически проверяется. Детерминизм значений существенно ограничивает область контроля, а статистика обработки ведет к запаздыванию результата, зависимому и от привлечения к контролю доопытной информации (ее может вообще не быть) и специалистов-экипажа, который занят управлением ЛА. Сложность устройства "Регата" как централизованной интегральной системы контроля всего самолета и, как результат, его низкая собственная надежность отрицательно влияют на достоверность обнаружения отказов отдельных особенно высоконадежных систем самолета, каким и является пилотажно-навигационный комплекс. Степень автоматизации контроля в полете без участия экипажа, наземного предполетного и послеполетного обслуживания по базам данных желательно повысить, что исключительно актуально для беспилотных ЛА [7, с. 79].
Известна схема контроля аналого-цифрового навигационного вычислительного устройства НВУ - Б3 (Козарук В.В. Навигационно-пилотажный комплекс самолета ТУ-154 и его эксплуатация. М.: Машиностроение, 1993. С. 66; Анненков Н.П. Приборы и навигационно-пилотажное оборудование самолетов ТУ-154 и ТУ-154Б. М.: Транспорт, 1980. С. 63; Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С. 316; Навигационное вычислительное устройство НВУ-Б3 сер. 03. Руководство по эксплуатации и техническому обслуживанию, и др.). Устройство содержит датчик воздушной скорости, датчик курса, доплеровский измеритель скорости и сноса, радиотехническую систему ближней навигации, аналого-цифровой вычислитель, счетчик, указатели. В основу работы устройства положен алгоритм воздушно-доплеровского комплексного счисления пути в условной прямоугольной системе координат с периодической коррекцией. Импульсные сигналы доплеровских сдвигов частот используются для формирования импульсных сигналов составляющих путевой скорости с последующей подачей на интегрирующие приводы индикаторов. Устройство содержит встроенные схемы контроля делителя частоты, исправления кодов и преобразования сигнала путевой скорости, выходы которых соединены с входами логической схемы ИЛИ, сигнализирующей об отказе. Повышение точности навигации НВУ-Б3, при цифроаналоговом преобразовании, привело к необходимости резервирования блоков счисления и введению указанного локального контроля дискретных операций. Однако применение указанных схем встроенного контроля возможно не для всего устройства, а только для промежуточных параметров счетно-решающего блока, глубина контроля ограничена, точность и достоверность встроенного контроля определения местоположения подвижного объекта неизвестны. Применение радиотехнической системы ближней навигации (РСБН) для контроля и коррекции всего комплекса имеет периодический, ограниченный по времени характер на маршруте полета. Для контроля комплекса, содержащего доплеровский измеритель скорости и сноса ДИСС-013 (ТДИСС=4000 ч.), систему воздушных сигналов СВС-ПН-15-4Б (ТСВС=600 ч.), инерциальную курсовертикаль ИКВ-802 (ТИКВ=500 ч.), радиотехническую систему ближней навигации РСБН А-312-10 (ТРСБН=400 ч.), навигационный вычислитель ЦВМ-20М (ТНВ=1200 ч.), задатчик угла карты ЗУК (ТЗУК=9800 ч.), приемник температуры ПТ (ТПТ=300000 ч.), имеющего надежность РС(2)=0,990336, получаем наибольшее значение вероятности обнаружения отказа именно пилотажно-навигационного комплекса - достоверности контроля РД2(2)=0,661656, что соответствует времени достоверного контроля  . Информационная производительность контроля IНВУ=IДИСС+IИКВ+IСВС+IРСБН+IЗУК+IПТ=0,684 бит/с. Контрольное устройство - РСБН не обладает автономностью работы, имеет большие габариты VHBУ=49 дм3, вес МНВУ=70 кг, энергопотребление РНВУ=300 ВА; 4005 Вт. Надежность всего комплекса ТС2=136 ч.
. Информационная производительность контроля IНВУ=IДИСС+IИКВ+IСВС+IРСБН+IЗУК+IПТ=0,684 бит/с. Контрольное устройство - РСБН не обладает автономностью работы, имеет большие габариты VHBУ=49 дм3, вес МНВУ=70 кг, энергопотребление РНВУ=300 ВА; 4005 Вт. Надежность всего комплекса ТС2=136 ч.
Известно устройство-прототип контроля пилотажно-навигационной системы, реализованное в навигационных индикаторах (НИ-50БМ, НИ-50ИМ) и автоматических навигационных устройствах (АНУ-1, АНП, ЦНВУ и др.) (Богданченко Н.М. Курсовые системы и навигационные вычислители самолетов гражданской авиации. Транспорт, 1978. С. 255-256; Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С. 385-386; Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. М.: Машиностроение, 1983. С. 385), имеющее, как и НВУ-Б3, наиболее распространенную схему счисления пути подвижного объекта. Устройство-прототип контроля пилотажно-навигационной системы подвижного объекта, содержит первый преобразователь координат, первый вход которого соединен с первым выходом датчика путевой скорости, второй вход, через первый сумматор - с выходом датчика угла сноса, первый выход - с первым входом первого переключателя, второй его выход - с первым входом второго переключателя, второй управляющий вход которого, как и второй управляющий вход первого переключателя, соединен со вторым выходом датчика путевой скорости. Второй вход первого сумматора соединен с выходом первой схемы вычитания, суммирующим входом подключенной к выходу датчика курса, а вычитающим входом - к выходу задатчика угла карты. Устройство содержит также второй преобразователь координат, первый вход которого соединен с выходом датчика воздушной скорости, второй вход - с выходом первой схемы вычитания. Первый выход второго преобразователя координат - через второй сумматор соединен с третьим входом первого переключателя и вычитающим входом второй схемы вычитания, выход которой через первую ячейку памяти соединен со вторым входом второго сумматора. Второй выход второго преобразователя координат - через третий сумматор соединен с третьим входом второго переключателя и вычитающим входом третьей схемы вычитания, выход которой через вторую ячейку памяти соединен со вторым входом третьего сумматора. Выход первого переключателя соединен с суммирующим входом второй схемы вычитания, последовательно соединенными первым интегратором и четвертым сумматором, второй вход которого соединен с выходом первого задатчика координат, а выход - с первым входом индикатора пилотажно-навигационной системы. Выход второго переключателя соединен с суммирующим входом третьей схемы вычитания, последовательно соединенными вторым интегратором и пятым сумматором, второй вход которого соединен с выходом второго задатчика координат, а выход - со вторым входом индикатора пилотажно-навигационной системы. Первый и второй интеграторы выполнены на интегрирующих электродвигателях, роторы которых через понижающие редукторы связаны со стрелками индикатора пройденного пути подвижным объектом. Устройство имеет также подвижные контрольные индексы, вращающиеся с большим числом оборотов в малом окне основного индикатора системы - счетчика, содержащего отмеченные интегрирующие двигатели. Индексы, как и стрелки пройденного пути индикатора, связаны с редукторами интегрирующих электродвигателей. Своим быстрым, заметным вращением они информируют летчика об исправности системы только тем, что сообщают о наличии напряжений на интегрирующих электродвигателях. Помимо встроенного контроля, здесь имеет место и полный автономный контроль и коррекция пилотажно-навигационной комплекса, который периодически ведется с помощью секстанта перископического (СП) или автоматического астроориентатора (АО).
Габариты, вес, энергопотребление, сложность устройства контроля здесь возможны минимальные. Устройство использует информацию датчиков уже имеющихся на борту и входящих в состав штатного приборного оборудования подвижного объекта. Аппаратная безызбыточность и простота встроенного устройства являются его основными преимуществами, но точность работы проверяемой пилотажно-навигационной системы здесь не оценивается, исправность, входящих в пилотажно-навигационную систему датчиков и вычислителя, не проверяется. Устройство контроля может имитировать исправность работы системы при отказе одного из датчиков, что очень опасно в полете. Контроль, как и в большинстве аналогов, носит косвенный характер. Аналитическая оценка достоверности и информационной производительности встроенного контроля весьма затруднена. Приближенно, при надежности устройства-прототипа [8, с. 132] пилотажно-навигационной системы, имеющей (ТПС=174 ч.) с контролем по астрономическому ориентатору (ТПС=100 ч.), получаем наибольшее значение достоверности контроля - вероятности обнаружения отказа РД3(2)=0,368543, что соответствует времени достоверного контроля  . Информационная производительность контроля здесь IНИ=0,181 бит/с. Вес НИ-50 МНИ=8 кг., вес астрономического датчика - секстанта перископического МПС=29 кг. Потребляемая мощность РНИ=30 ВА; 25 Вт. Надежность комплекса NC3=64 ч. Именно присутствие автономного астрономического датчика, необходимого для обнаружения отказа, сделало целесообразным применение этого устройства в пилотажно-навигационных комплексах большого числа летательных аппаратов.
. Информационная производительность контроля здесь IНИ=0,181 бит/с. Вес НИ-50 МНИ=8 кг., вес астрономического датчика - секстанта перископического МПС=29 кг. Потребляемая мощность РНИ=30 ВА; 25 Вт. Надежность комплекса NC3=64 ч. Именно присутствие автономного астрономического датчика, необходимого для обнаружения отказа, сделало целесообразным применение этого устройства в пилотажно-навигационных комплексах большого числа летательных аппаратов.
Основной задачей, на решение которой направлены заявленный способ и устройство, является создание аппаратурно безызбыточной автономной комплексной системы автоматического управления и контроля повышенной точности, надежности, информационной производительности и достоверности контроля с высокими технико-экономическими показателями по весу, габаритам, энергопотреблению, стоимости, удобству ее эксплуатации на легком летательном аппарате.
Техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является повышение достоверности обнаружения отказа, информационной производительности, точности контроля параметров с автономными безызбыточными средствами минимального веса, габаритов, энергопотребления, сложности и стоимости, контроль по безынерционным соотношениям, содержащим простейшие арифметические операции реализуемые на борту летательного аппарата.
Технический результат достигается тем, что в способе контроля пилотажно-навигационной системы, основанном на измерении величины и направления скорости подвижного объекта относительно окружающей среды, величины и направления скорости подвижного объекта относительно Земли, согласно изобретению одновременно измеряют угол сноса объекта, величину и направление линейной скорости подвижного объекта относительно окружающей среды, величину и направление линейной скорости подвижного объекта относительно Земли, затем определяют разность величин и направлений линейной скорости подвижного объекта относительно Земли и линейной скорости подвижного объекта относительно окружающей среды, полученную разность сравнивают с известной по метеопрогнозу величиной и направлением линейной скорости окружающей среды подвижного объекта, в известных координатах местоположения подвижного объекта относительно Земли.
Указанный технический результат достигается тем, что в устройство контроля пилотажно-навигационного комплекса, содержащее первый преобразователь координат, первый вход которого соединен с первым выходом датчика путевой скорости, второй вход через первый сумматор - с выходом датчика угла сноса, первый выход первого преобразователя координат соединен с первым входом первого переключателя, второй его выход - с первым входом второго переключателя, второй управляющий вход которого, как и второй управляющий вход первого переключателя, соединены со вторым выходом датчика путевой скорости, второй вход первого сумматора соединен с выходом первой схемы вычитания, суммирующим входом подключенной к выходу датчика курса, а вычитающим входом - к выходу задатчика угла карты, второй преобразователь координат, первый вход которого соединен с выходом датчика воздушной скорости, второй вход - с выходом первой схемы вычитания, первый выход второго преобразователя координат - через второй сумматор соединен с третьим входом первого переключателя и вычитающим входом второй схемы вычитания, выход которой через первую ячейку памяти соединен со вторым входом второго сумматора, второй выход второго преобразователя координат - через третий сумматор соединен с третьим входом второго переключателя и вычитающим входом третьей схемы вычитания, выход которой через вторую ячейку памяти соединен со вторым входом третьего сумматора, выход первого переключателя соединен с суммирующим входом второй схемы вычитания и входом первого интегратора, выход которого соединен с первым входом четвертого сумматора, второй вход которого соединен с выходом первого задатчика координат, а выход - с индикатором, выход второго переключателя соединен с суммирующим входом третьей схемы вычитания и входом второго интегратора, выход которого соединен с первым входом пятого сумматора, второй вход которого соединен с выходом второго задатчика координат координат, а выход -со вторым входом индикатора, дополнительно введены задатчик ветра, последовательно соединенные первый функциональный преобразователь, шестой сумматор, первый компаратор и логическая схема ИЛИ, последовательно соединенные второй функциональный преобразователь, седьмой сумматор и второй компаратор, выход которого соединен со вторым входом логической схемы ИЛИ, первый и второй выходы задатчика ветра соединены соответственно со вторыми входами шестого и седьмого сумматоров, входы первого и второго функциональных преобразователей соединены соответственно с выходами четвертого и пятого сумматоров, а вторые входы первого и второго компараторов соединены с выходами первой и второй ячейки памяти, причем преобразователь координат содержит последовательно соединенные третий функциональный преобразователь, первый умножитель, другой вход которого соединен с первым входом преобразователя координат, а выход - с первым выходом преобразователя координат, последовательно соединенные четвертый функциональный преобразователь, второй умножитель, другой вход которого соединен с первым входом преобразователя координат, а выход - со вторым выходом преобразователя координат, входы третьего и четвертого функциональных преобразователей соединены со вторым входом преобразователя координат.
Совокупность существенных признаков изобретения обеспечивает достижение технического результата, достигаемого при осуществлении изобретения - способа и устройства для контроля пилотажно-навигационной комплекса. Технический результат достигается за счет непрерывного вычисления на борту подвижного объекта его местоположения, текущих значений горизонтальных проекций вектора скорости ветра в условной прямоугольной системе координат с последующим сравнением этих проекций с их предварительно вычисленными оценками по метеопрогнозу на маршруте полета объекта. При появлении существенных отличий вычисленных текущих значений горизонтальных проекций вектора скорости ветра с их оценками по метеопрогнозу в непрерывно вычисляемых точках маршрута фиксируется отказ пилотажно-навигационной системы, полностью задействованной в работе алгоритма контроля.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественные всем признакам заявленного способа и устройства контроля пилотажно-навигационного комплекса отсутствуют, следовательно, заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства - аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства - аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства - аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства - аналога или его части из известного материала для достижения технического результата обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
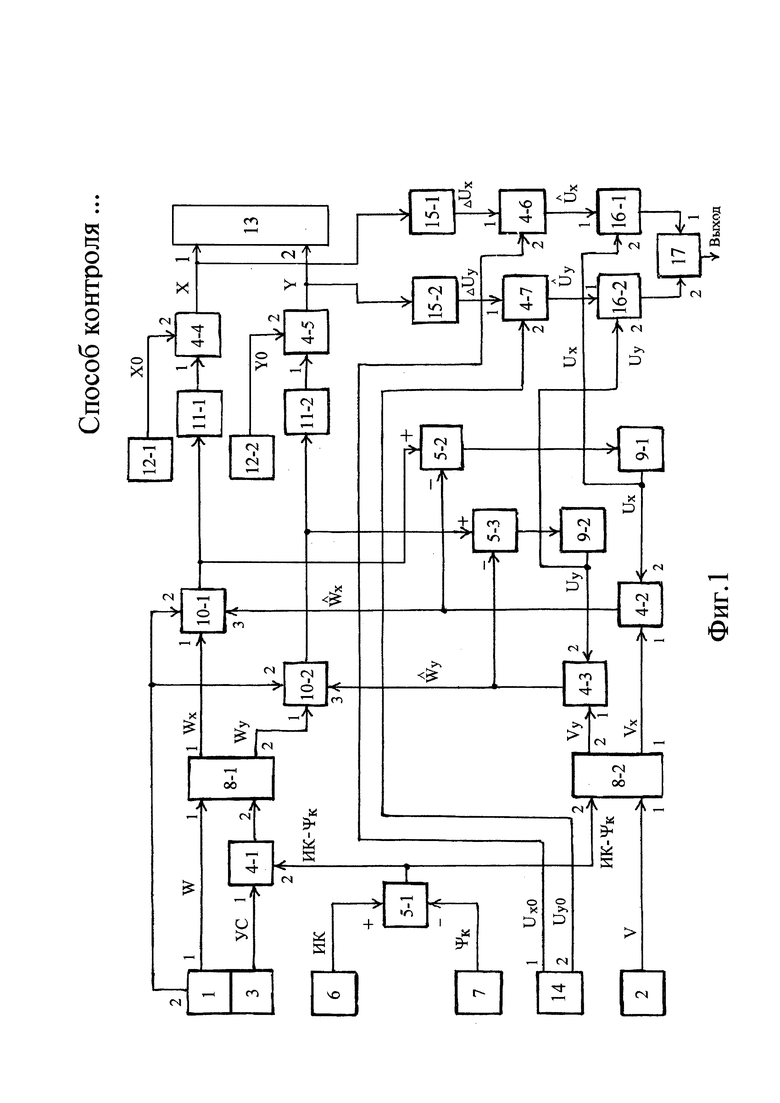
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена структурная схема устройства контроля пилотажно-навигационного комплекса по п. 2 формулы, где приняты следующие обозначения:
1 - датчик путевой скорости;
2 - датчик воздушной скорости;
3 - датчик угла сноса;
4-1, 4-2, 4-3, 4-4, 4-5, 4-6, 4-7 - первый, второй, третий, четвертый, пятый, шестой, седьмой сумматоры;
5-1, 5-2, 5-3 - первый, второй, третий схемы вычитания;
6 - датчик курса;
7 - задатчик угла карты;
8-1, 8-2 - первый, второй преобразователь координат;
9-1, 9-2 - первая, вторая ячейка памяти;
10-1, 10-2 - первый, второй переключатели;
11-1, 11-2- первый, второй интеграторы;
12-1, 12-2 - первый, второй задатчики координат;
13 - индикатор;
14 - задатчик ветра;
15-1,15-2 - первый, второй функциональные преобразователи;
16-1, 16-2 - первый, второй компараторы;
17 - логическая схема ИЛИ;
W - путевая скорость;
Wx - горизонтальная проекция вектора путевой скорости подвижного объекта на ось X условной прямоугольной ортодромической системы координат;
Wy - горизонтальная проекция вектора путевой скорости подвижного объекта на ось Y условной прямоугольной ортодромической системы координат;
УС - угол сноса;
ИК - истинный курс;
ΨК - угол карты;
Uy0 - горизонтальная проекция вектора скорости ветра на ось Y условной прямоугольной ортодромической системы координат в исходной точке маршрута;
Ux0 - горизонтальная проекция вектора скорости ветра на ось X условной прямоугольной ортодромической системы координат в исходной точке маршрута;
 - оценка горизонтальной проекции вектора скорости ветра на ось Y условной прямоугольной ортодромической системы координат;
- оценка горизонтальной проекции вектора скорости ветра на ось Y условной прямоугольной ортодромической системы координат;
 - оценка горизонтальной проекции вектора скорости ветра на ось X условной прямоугольной ортодромической системы координат;
- оценка горизонтальной проекции вектора скорости ветра на ось X условной прямоугольной ортодромической системы координат;
Uy - горизонтальная проекция вектора скорости ветра на ось Y условной прямоугольной ортодромической системы координат;
Ux - горизонтальная проекция вектора скорости ветра на ось X условной прямоугольной ортодромической системы координат;
ΔUy -приращение горизонтальной проекции вектора скорости ветра Uy0 на ось Y условной прямоугольной ортодромической системы координат;
ΔUx - приращение горизонтальная проекция вектора скорости ветра Ux0 на ось X условной прямоугольной ортодромической системы координат;
V - воздушная скорость подвижного объекта;
Vx - горизонтальная проекция вектора воздушной скорости подвижного объекта на ось X условной прямоугольной ортодромической системы координат;
Vy - горизонтальная проекция вектора воздушной скорости подвижного объекта на ось Y условной прямоугольной ортодромической системы координат;
 - оценка горизонтальной проекции вектора путевой скорости подвижного объекта на ось X условной прямоугольной ортодромической системы координат;
- оценка горизонтальной проекции вектора путевой скорости подвижного объекта на ось X условной прямоугольной ортодромической системы координат;
 - оценка горизонтальной проекции вектора путевой скорости подвижного объекта на ось Y условной прямоугольной ортодромической системы координат;
- оценка горизонтальной проекции вектора путевой скорости подвижного объекта на ось Y условной прямоугольной ортодромической системы координат;
X - линейное перемещение подвижного объекта по оси X условной прямоугольной ортодромической системы координат;
Y - линейное перемещение подвижного объекта по оси Y условной прямоугольной ортодромической системы координат;
Х0 - начальное линейное перемещение подвижного объекта по оси X условной прямоугольной ортодромической системы координат;
Y0 - начальное линейное перемещение подвижного объекта по оси Y условной прямоугольной ортодромической системы координат;
 - линейное перемещение подвижного объекта по оси X условной прямоугольной ортодромической системы координат в режиме "Память";
- линейное перемещение подвижного объекта по оси X условной прямоугольной ортодромической системы координат в режиме "Память";
 - линейное перемещение подвижного объекта по оси Y условной прямоугольной ортодромической системы координат в режиме "Память".
- линейное перемещение подвижного объекта по оси Y условной прямоугольной ортодромической системы координат в режиме "Память".
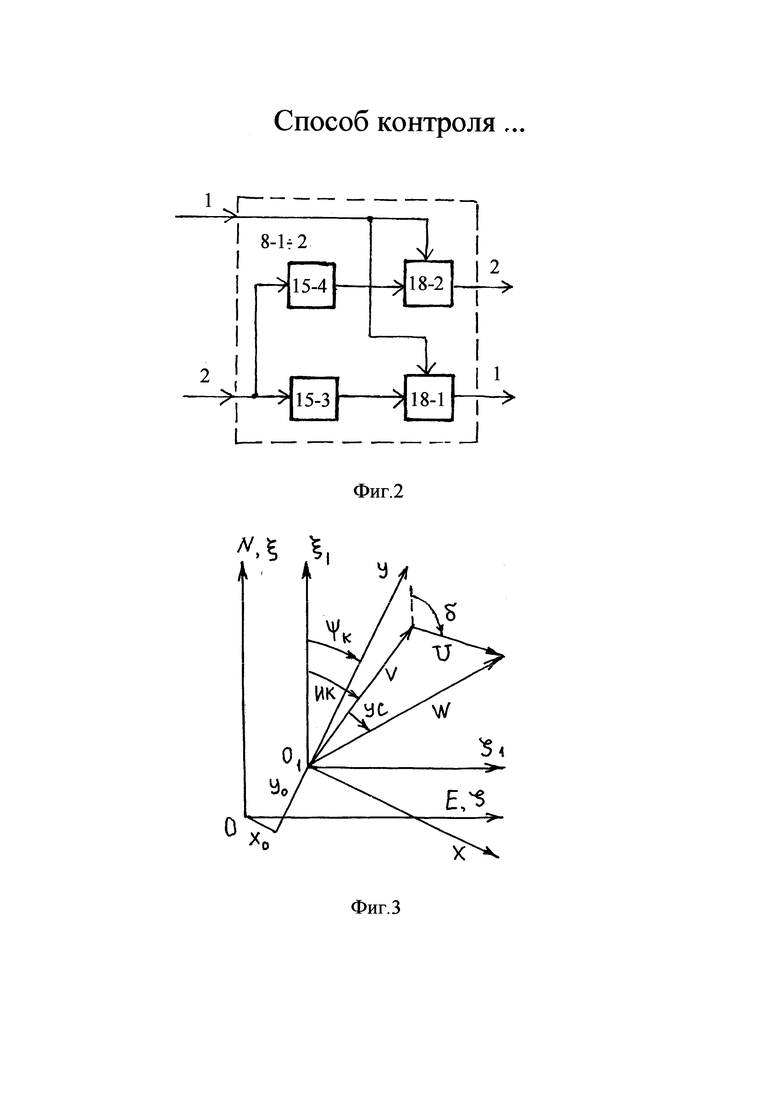
На фиг. 2 изображена структура преобразователя 8-1÷2 координат, где приняты следующие обозначения:
15-3, 15-4 - третий, четвертый функциональные преобразователи;
18-1, 18-2 - первый, второй умножители.
На фиг. 3 изображено положение горизонтальных проекций систем координат, линейных скоростей и углов, относительно географически ориентированной системы координат О ξ ζ, где приняты следующие обозначения:
О ξ ζ - географически ориентированная прямоугольная горизонтальная система координат, ось ξ которой направлена на север N, ось ζ направлена на восток Е, точка О исходная точка маршрута, O1 - начальное линейное перемещение;
О1 ξ1 ζ1 - географически ориентированная прямоугольная горизонтальная система координат в точке старта подвижного объекта;
O1 X Y - прямоугольная ортодромическая система координат, ось Y направлена по ортодромии, ось X ортогональна Y;
δ - направление ветра;
 - вектора образуют так называемый "треугольник скоростей".
- вектора образуют так называемый "треугольник скоростей".
Сущность способа контроля пилотажно-навигационной комплекса состоит в одновременном сравнении вычисленной величины и направления измеренного вектора  скорости ветра, с помощью датчиков и вычислителя проверяемого пилотажно-навигационного комплекса, с вычисленной по метеоданным оценкой этого вектора
скорости ветра, с помощью датчиков и вычислителя проверяемого пилотажно-навигационного комплекса, с вычисленной по метеоданным оценкой этого вектора  , как функции линейных перемещений X, Y подвижного объекта по ортодромии. При этом используется известное соотношение для горизонтальных проекций вектров
, как функции линейных перемещений X, Y подвижного объекта по ортодромии. При этом используется известное соотношение для горизонтальных проекций вектров

где  - вектор путевой скорости, м/с;
- вектор путевой скорости, м/с;  - вектор воздушной скорости, м/с;
- вектор воздушной скорости, м/с;  - вектор скорости ветра, м/с. Для проверяемого комплекса, в основном режиме работы, когда исправны все его элементы, в вычислителе непрерывно ведется решение "треугольника скоростей" относительно проекций вектора скорости ветра в виде
- вектор скорости ветра, м/с. Для проверяемого комплекса, в основном режиме работы, когда исправны все его элементы, в вычислителе непрерывно ведется решение "треугольника скоростей" относительно проекций вектора скорости ветра в виде

или 
Учитывая взаимное угловое положение векторов (фиг. 3), соотношения (3), определяемые в проверяемой пилотажно-навигационном комплексе, можно записать следующим образом

или 
Непрерывное, в процессе полета, определение Ux, Uy по выражениям (5) входит в полный алгоритм работы проверяемой, например воздушно-доплеровской системы счисления пути [9, с. 316]. Однако эта информация в основном режиме счисления пути не используется, так как пилотажно-навигационная система производит только счисление пути во времени t с помощью составляющих путевой скорости Wx, Wy

где Wx, Wy - горизонтальные проекции вектора путевой скорости
подвижного объекта соответственно на осях x, y условной прямоугольной ортодромической системы координат. Информация о местоположении x, y подвижного объекта, получаемая после интегрирования (6) на выходе контролируемой пилотажно-навигационной системы, позволяет определить величину и направление скорости ветра по метеопрогнозу. Для этого используется карта метеопрогноза Ux(x,y), Uy(x,y) с географическими и условными прямоугольными координатами маршрута подвижного объекта. Здесь учитывается, что метеопрогноз дается в географических координатах, а вычисляемое пилотажно-навигационной системой местоположение подвижного объекта - в условной прямоугольной горизонтальной системе координат, положение которой определяется датчиком курса, задатчиком угла карты, датчиком угла сноса системы. При этом оценки  проекций скорости ветра определяем через приращения ΔUx, ΔUy в виде
проекций скорости ветра определяем через приращения ΔUx, ΔUy в виде

Дискретные значения величины и направления скорости ветра по метеопрогнозу на маршруте аппроксимируются для текущих координат местоположения X, Y подвижного объекта. В основном режиме счисления пути, учитывая (6) и (7), получаем соотношения для контроля пилотажно-навигационной комплекса








где Φi,  - функции точности контроля и пороги срабатывания компараторов;
- функции точности контроля и пороги срабатывания компараторов;  - выходной сигнал i - того компаратора. Выходной сигнал всего устройства
- выходной сигнал i - того компаратора. Выходной сигнал всего устройства  - дизъюнкция сигналов сравнения двух функций точности контроля и порогов срабатывания компараторов. В режиме "память" счисления пути, учитывая (6) и (7), получаем соотношения для контроля пилотажно-навигационного комплекса
- дизъюнкция сигналов сравнения двух функций точности контроля и порогов срабатывания компараторов. В режиме "память" счисления пути, учитывая (6) и (7), получаем соотношения для контроля пилотажно-навигационного комплекса







где t=tП - время перехода пилотажно-навигационной системы в режим "память" по сигналу на втором выходе, например, доплеровского измерителя путевой скорости и угла сноса; UxП, UyП - последние вычисленные в системе, для времени t=tП, и далее фиксированные значения проекции скорости ветра. Переход пилотажно-навигационной системы в режим "память" возможен из-за отказа доплеровского измерителя скорости и угла сноса, или состояния полетной среды.
Способ контроля пилотажно-навигационного комплекса осуществляют следующим образом. Перед полетом, по метеопрогнозу определяют величину и направление ветра в нескольких характерных точках на маршруте. Затем, с помощью задатчиков 12-1, 12-2 координат Х0, Y0, задатчика 14 ветра Vx0, Vy0, сумматоров 4-6, 4-7, функциональных преобразователей 15-1,15-2 и компараторов 16-1,16-2 проводят поочередно настройку функциональных преобразователей 15-1, 15-2 так, чтобы получать необходимые приращения ΔUx(x, y), ΔUy(x,y) на сумматорах 4-6, 4-7 в оценках вектора скорости ветра  . Перед полетом выбор порогов срабатывания компараторов 16- 1, 16-2 проводят с учетом точности измерения Ux,Uy в ячейках памяти 9-1,9-2 контролируемой пилотажно-навигационной системы с датчиком 1 путевой скорости, датчиком 2 воздушной скорости, датчиком 3 угла сноса, датчиком 6 курса, задатчиком 7 угла карты, а также точности аппроксимации ветра функциональными преобразователями 15-1,15-2. Метеопрогноз, с близкими к фактическим значениями величины и направления ветра, целесообразно вести с интервалом по времени 0,5-1 час, используя информацию метеоспутников в автоматизированной метеорологической информационно-измерительной системе (АМИИС), объединяющей, например отечественный комплекс радиотехнических автоматических метеорологических станций КРАМС-2, КРАМС-2 АРМ, КРАМС-4. Решение задачи полетного контроля исправности основных датчиков пилотажно-навигационного комплекса, а значит обеспечение безопасности полета, ведется параллельно с решением основной задачи навигации и управления подвижным объектом. При этом в наибольшей мере используется аппаратный состав контролируемой системы и дополнительная информация о величине и направлении ветра на маршруте. Объем этой информации, учитывая современные возможности БЦВМ и средств спутниковой связи сравнительно невелик и, как предлагается в заявке, может быть сведен к предполетной записи в функциональных преобразователях 15-1, 15-2 приращений ΔUx(x, y), ΔUy(x,y) скорости ветра. Совершенствование бортовых и спутниковых средств обмена навигационной и метеоинформацией ведет, в перспективе, к повышению точности и безопасности полетов по маршрутам с трудно прогнозируемыми погодными явлениями, например трансарктическим полетам. В том случае, когда работа датчика 1 путевой скорости становится невозможной из-за его отказа или усложнения условий полета, обнаруживаемого встроенной схемой. На втором выходе датчика 1 путевой скорости появляется сигнал управления "Память", поступающий на вторые входы переключателей 10-1, 10-2. Это приводит к отключению первых входов переключателей 10-1, 10-2 от их выходов, на которые теперь поступают оценки путевой скорости:
. Перед полетом выбор порогов срабатывания компараторов 16- 1, 16-2 проводят с учетом точности измерения Ux,Uy в ячейках памяти 9-1,9-2 контролируемой пилотажно-навигационной системы с датчиком 1 путевой скорости, датчиком 2 воздушной скорости, датчиком 3 угла сноса, датчиком 6 курса, задатчиком 7 угла карты, а также точности аппроксимации ветра функциональными преобразователями 15-1,15-2. Метеопрогноз, с близкими к фактическим значениями величины и направления ветра, целесообразно вести с интервалом по времени 0,5-1 час, используя информацию метеоспутников в автоматизированной метеорологической информационно-измерительной системе (АМИИС), объединяющей, например отечественный комплекс радиотехнических автоматических метеорологических станций КРАМС-2, КРАМС-2 АРМ, КРАМС-4. Решение задачи полетного контроля исправности основных датчиков пилотажно-навигационного комплекса, а значит обеспечение безопасности полета, ведется параллельно с решением основной задачи навигации и управления подвижным объектом. При этом в наибольшей мере используется аппаратный состав контролируемой системы и дополнительная информация о величине и направлении ветра на маршруте. Объем этой информации, учитывая современные возможности БЦВМ и средств спутниковой связи сравнительно невелик и, как предлагается в заявке, может быть сведен к предполетной записи в функциональных преобразователях 15-1, 15-2 приращений ΔUx(x, y), ΔUy(x,y) скорости ветра. Совершенствование бортовых и спутниковых средств обмена навигационной и метеоинформацией ведет, в перспективе, к повышению точности и безопасности полетов по маршрутам с трудно прогнозируемыми погодными явлениями, например трансарктическим полетам. В том случае, когда работа датчика 1 путевой скорости становится невозможной из-за его отказа или усложнения условий полета, обнаруживаемого встроенной схемой. На втором выходе датчика 1 путевой скорости появляется сигнал управления "Память", поступающий на вторые входы переключателей 10-1, 10-2. Это приводит к отключению первых входов переключателей 10-1, 10-2 от их выходов, на которые теперь поступают оценки путевой скорости:

с последними по времени запомненными значениями проекций скорости ветра UxП, UyП. Последующая работа пилотажно-навигационной системы происходит в режиме "Память" с менее точным вычислением координат  местоположения подвижного объекта. Точность вычисления оценок приращений ΔUx, ΔUy на выходах функциональных преобразователей 15-1,15-2 и сумматоров 4-6,4-7
местоположения подвижного объекта. Точность вычисления оценок приращений ΔUx, ΔUy на выходах функциональных преобразователей 15-1,15-2 и сумматоров 4-6,4-7

будет ухудшена, но контроль работы пилотажно-навигационной системы сохраняется.
Для полета по заданному маршруту определяют по карте метеопрогноза величину и направление ветра в исходном пункте Ux0, Uy0, точках линии пути, количество которых зависит от дальности, изменчивости ветра, и в конечном пункте. Вводим задатчик 7 угла карты направление движения. С помощью задатчика 14 ветра, задатчиков 12-1,12-2 координат и сумматоров 4-4, 4-5, 4-6, 4-7, функциональных преобразователей 15-1, 15-2 и компараторов 16-1,16-2, перед полетом последовательно вводим в систему функциональных преобразователей 15-1,15-2 известные по метеопрогнозу величины и направления скорости ветра в точках линии пути с аппроксимацией промежуточных значений. Для аналогово-цифровой реализации возможно применение известных ПНФ преобразователей и микросхем памяти [9, с. 176-177; 10, рис. 1.2, с. 10, рис. 5-4, с. 144] в наземных комплексах подготовки данных подобных архитектуре [11, с. 143]. Настройка функциональных преобразователе 15-1, 15-2, для точки маршрута с координатами X, Y, определялась по срабатыванию компараторов 16-1, 16-2 при формировании соответствующих ΔUx, ΔUy на их выходах. Вся информация о величинах и направлениях скорости ветра заранее программировалась приращениями к Ux0, Uy0, в функциональных преобразователях 15-1,15-2 по маршруту полета. В основном режиме работы пилотажно-навигационной системы, вычисленные величины и направления скорости ветра с первой 9-1 и второй 9-2 ячеек памяти непрерывно сравнивались в компараторах 16-1,16-2 проверяя исправность датчиков 1 путевой скорости, датчика 2 воздушной скорости, датчика 3 угла сноса, датчика 6 курса, датчика 7 угла карты, задатчика 14 ветра и вычислителя "треугольника скоростей'', включающего первый 4-1, второй 4-2, третий 4-3, четвертый 4-4, пятый 4-5 сумматоры, первую 5-1, вторую 5-2, третью 5-3 схемы вычитания, первый 8-1, второй 8-2 преобразователи координат, первый 10-1, второй 10-2 переключатели, первый 11-1, второй 11-2 интеграторы, первый 12-1, второй 12-2 задатчики координат, проверяемой пилотажно-навигационной системы. Тем самым контроль охватывает наибольшее число элементов типовой структуры пилотажно-навигационной системы, используя ее элементы для алгоритма контроля с минимальным числом вспомогательных блоков и схем. Контролируются и ее выходные сигналы.
Суть изобретения состоит в создании простого, аппаратно-безызбыточного полностью автономного многопараметрического способа контроля весьма распространенной схемы пилотажно-навигационной системы. Контроль охватывает весь комплекс бортовых измерительно-вычислительных средств подвижного объекта. Он основан на проверке выполнения соотношений между горизонтальными проекциями вектора путевой скорости, вектора воздушной скорости, вектора скорости ветра и их угловой ориентации в навигационном "треугольнике скоростей". При этом используется определенность данных метеопрогноза величины и направления ветра по маршруту, программируемая перед вылетом, и их аппроксимация для любых линейных точек местоположения подвижного объекта, что позволяет непрерывно контролировать выходную информацию пилотажно-навигационной системы. Способ включает все параметры и алгоритм работы проверяемой системы как в основном режиме, так и в режиме "Память". Способ может использовать и работу с текущей метеоинформацией о скорости ветра, например через ИСЗ и INTERNET бортовой и глобальной сети, в режиме активного взаимного обмена, информацией, что имеет значение при движении объекта в труднодоступных местностях, например по трансарктическим авиатрассам.
Устройство контроля пилотажно-навигационной системы подвижного объекта содержит датчик 1 путевой скорости, датчик 2 воздушной скорости и датчик 3 угла сноса, выход которого соединен с первым входом первого сумматора 4-1, второй вход которого соединен с выходом первой схемы 5-1 вычитания. Суммирующий вход первой схемы 5-1 вычитания соединен с выходом датчика 6 курса, а вычитающий вход - с выходом задатчика 7 угла карты. Первый выход датчика 1 путевой скорости соединен с первым входом первого преобразователя 8-1 координат, второй вход которого соединен с выходом первого сумматора 4-1. Первый вход второго преобразователя 8-2 координат соединен с выходом датчика 2 воздушной скорости, второй вход - с выходом первой схемы 5-1 вычитания, первый выход - со входом второго сумматора 4-2, другой вход которого соединен с выходом первой ячейки 9-1 памяти, второй выход - с входом третьего сумматора 4-3, другой вход которого соединен с выходом второй 9-2 ячейки памяти. Первый вход первого переключателя 10-1 соединен с первым выходом первого преобразователя 8-1 координат, второй вход - со вторым выходом датчика 1 путевой скорости, третий вход - с выходом второго сумматора 4-2. Выход первого переключателя 10-1 соединен с входом первого интегратора 11-1 и суммирующим входом второй схемы 5-2 вычитания, вычитающий вход которой соединен с выходом второго сумматора 4-2. Выход второй схемы 5-2 вычитания соединен с входом первой ячейки 9-1 памяти. Первый вход второго переключателя 10-2 соединен со вторым выходом первого преобразователя 8-1 координат, второй вход - со вторым выходом датчика 1 путевой скорости, третий вход -с выходом третьего сумматора 4-3, а выход - с входом второго интегратора 11-2 и суммирующим входом третьей схемы 5-3 вычитания, вычитающий вход которой соединен с выходом третьего сумматора 4-3. Выход третьей схемы 5-3 вычитания соединен с входом второй ячейки 9-2 памяти. Выход первого интегратора 11-1 через четвертый сумматор 4-4, второй вход которого соединен с выходом первого задатчика 12-1 координат, соединен с первым входом индикатора 13. Выход второго интегратора 11-2 через пятый сумматор 4-5, второй вход которого соединен с выходом второго задатчика 12-2 координат, соединен со вторым входом индикатора 13. В устройство введен задатчик 14 ветра, а также последовательно соединенные первый функциональный преобразователь 15-1, шестой сумматор 4-6, первый компаратор 16-1 и логическая схема ИЛИ 17. Аналогично последовательно соединены второй функциональный преобразователь 15-2, седьмой сумматор 4-7 и второй компаратор 16-2, выход которого соединен со вторым входом логической схемы ИЛИ 17. Первый и второй выходы задатчика 14 ветра соединены соответственно со вторыми входами шестого 4-6 и седьмого 4-7 сумматоров. Входы первого 15-1 и второго 15-2 функциональных преобразователей соединены соответственно с выходами четвертого 4-4 и пятого 4-5 сумматоров, а вторые входы первого 16-1 и второго 16-2 компараторов соединены с выходами первой 9-1 и второй 9-2 ячейки памяти. Входы логической схемы ИЛИ 17 соединены с выходами первого 16-1 и второго 16-2 компараторов, а выход - с выходом устройства контроля.
Преобразователь 8-1,8-2 координат содержит последовательно соединенные третий функциональный преобразователь 15-3, первый умножитель 18-1, другой вход которого соединен с первым входом преобразователя 8-1,8-2 координат, а выход - с первым выходом преобразователя 8-1,8-2 координат, последовательно соединенные четвертый функциональный преобразователь 15-4, второй умножитель 18-2, другой вход которого соединен с первым входом преобразователя 8-1,8-2 координат, а выход - со вторым выходом преобразователя 8-1,8-2 координат, входы третьего 15-3 и четвертого 15-4 функциональных преобразователей соединены со вторым входом преобразователя 8-1,8-2 координат. Функциональный преобразователь 15-3 реализует функцию sin входного сигнала на втором входе преобразователя 8-1÷2 координат, а функциональный преобразователь 15-4 - функцию cos входного сигнала на том же входе.
Практическая реализация способа и устройства контроля пилотажно-навигационного комплекса аппарата возможна на аналоговой и цифровой схемотехнической базе [14-16]. Контролируемый пилотажно-навигационный комплекс, в котором определяются и вводятся параметры: путевой скорости подвижного объекта W, угла сноса УС, истинный курс ИК, угол карты Ψк, проекции скорости ветра Ux0, Uy0, воздушная скорость V, начальные линейные перемещения подвижного объекта по осям X, Y условной прямоугольной ортодромической системы координат X0, Y0, может быть построен с высокой степенью интеграции измерителей на базе инерциальных систем типа: ИКВ-802, ИКВ-1÷8, ИКВ-72, И-11, И-21, ИКВ-1, И-42, СБКВ, ЛИНС-2000, БИНС-85,как датчиках истинного курса. Датчик курса может также содержать только приборы: ТКС-П2, ГПК-52, ГМ-1, КС-8, ГМК-7. Основной датчик путевой скорости и угла сноса здесь доплеровский измеритель скорости и угла сноса типа ДИСС П11, ДИСС-013, ДИСС-7, ДИСС-1, ДИСС-15, ДИСС Ш-13 и др.; задатчик угла карты типа В-140, ЗУК-1, ЗУК-2, НИ-50АК, В-6В, В-6Р, ПНД-1, ЗК-4 и др.; задатчик ветра типа ЗВ-1, В-57, ЗВ-1К, В-6Р; датчик воздушной скорости типа СВС-ПН-15-4, НИ-50БМ-ДВС, ДВС-10,ЦСВ-1М, МВД, ИКВСП, СВС-72, СВС-2Ц, СВС-85 и др.; задатчик координат типа В-52-3, НИ-50-Счк, В-2А1, В-2В. Вычислительная часть устройства, включающая сумматоры 4-1,4-2,4-3,4-4,4-5,4-6,4-7, схемы вычитания 5-1,5-2,5-3, преобразователи координат 8-1,8-2, ячейки памяти 9-1,9-2, переключатели 10-1,10-2, интеграторы 11-1,11-2 могут быть реализованы на аналого-цифровом блоке - вычислителе рамы В-55-3Э (с блоками В-56-3,В-53-3,В-54-3,В-39-3) прототипа НВУ-БЗ. Аналоговые вычислители В-144 комплекса КН-23, БК-1 и счетчик НИ-50Сч системы АНУ-1, а также цифровые вычислители Орбита-20 комплекса "Пижма", БЦВМ 386/486, ЦВМ 80-30301 и программный модуль обмена могут реализовать вычислитель пилотажно-навигационного комплекса и устройства контроля содержащего функциональные преобразователи 15-1,15-2, сумматоры 4-6,4-7, компараторы 16-1,16-2, логическую схему ИЛИ 17. Аналоговая реализация систем контроля на функциональных преобразователях 15-1, 15-2 возможна на широко применяемых функциональных преобразователях напряжения типа ПНФ [9, с. 176; 10; 11, с. 104], сумматорах 4-6, 4-7, компараторах 16-1, 16-2 и логиеской схеме И микросхемного исполнения. Цифровая реализация систем контроля, включающих функциональные преобразователи 15-1, 15-2, сумматоры 4-6,4-7, компараторы 16-1, 16-2, логическую схему ИЛИ 17 возможна на программном модуле обмена [3, с. 373], получившим метеоинформацию от автоматизированной метеосистемы АМИИС [12, с. 10;13].
Устройство контроля пилотажно-навигационного комплекса работает следующим образом. В основном режиме работы системы, сигнал, пропорциональный путевой скорости W, с первого выхода датчика 1 путевой скорости поступает на первый вход преобразователя 8-1 координат, на второй вход которого через сумматор 4-1 поступает сигнал, пропорциональный углу сноса УС, с датчика 3 угла сноса. Одновременно на второй вход сумматора 4-1 поступает сигнал с выхода схемы 5-1 вычитания. На суммирующий вход схемы 5-1 вычитания поступает сигнал, пропорциональный истинному курсу ИК подвижного объекта с датчика 6 курса, а на вычитающий его вход - выходной сигнал с задатчика 7 угла карты, пропорциональный углу Ψк карты. На первом выходе преобразователя 8-1 координат получается сигнал, пропорциональный Wx=Wsin(ИК-ΨК+УС) горизонтальной проекции вектора путевой скорости подвижного объекта на ось X условной прямоугольной ортодромической системы координат. На втором выходе преобразователя 8-1 координат получается сигнал, пропорциональный Wy=Wcos(ИК-ΨК+УС) горизонтальной проекции вектора путевой скорости подвижного объекта на ось Y условной прямоугольной ортодромической системы координат. Эти сигналы соответственно через первый 10-1 и второй 10-2 переключатели поступают на суммирующие входы второй 5-2 и третьей 5-3 схем вычитания, а также входы первого 11-1 и второго 11-2 интеграторов. После интегрирования в 11-1, 11-2 и суммирования в сумматорах 4-4, 4-5  ;
;  получаются сигналы X, Y, пропорциональные линейным перемещениям подвижного объекта по осям X и Y условной прямоугольной ортодромической системы координат. Эти сигналы поступают на индикатор 13 и являются основными выходными сигналами проверяемой пилотажно-навигационной системы. По этим сигналам, поступающим на входы первого 15-1 и второго 15-2 функциональных преобразователей, получаются соответствующие приращения ΔUx, ΔUy. Суммирование в сумматорах 4-6,4-7 последних с выходными сигналами Ux0, Uy0 задатчика 14 ветра дает оценки значений проекций
получаются сигналы X, Y, пропорциональные линейным перемещениям подвижного объекта по осям X и Y условной прямоугольной ортодромической системы координат. Эти сигналы поступают на индикатор 13 и являются основными выходными сигналами проверяемой пилотажно-навигационной системы. По этим сигналам, поступающим на входы первого 15-1 и второго 15-2 функциональных преобразователей, получаются соответствующие приращения ΔUx, ΔUy. Суммирование в сумматорах 4-6,4-7 последних с выходными сигналами Ux0, Uy0 задатчика 14 ветра дает оценки значений проекций  ;
;  вектора скорости ветра в точке X,Y местоположения подвижного объекта на маршруте полета. Оценки проекций поступают соответственно на первые входы компараторов 16-1, 16-2.
вектора скорости ветра в точке X,Y местоположения подвижного объекта на маршруте полета. Оценки проекций поступают соответственно на первые входы компараторов 16-1, 16-2.
Одновременно, на первый вход преобразователя 8-2 координат поступает выходной сигнал V с датчика 2 воздушной скорости, пропорциональный воздушной скорости подвижного объекта, на второй вход - выходной сигнал ИК-Ψк с выхода схемы 5-1 вычитания. На первом и втором выходах преобразователя 8-2 координат получаем  сигналы, пропорциональные проекциям вектора V воздушной скорости на оси X, Y условной прямоугольной ортодромической системы координат. Переключатели 10-1, 10-2, в основном режиме работы системы, по третьим входам разомкнуты, так что выходные сигналы Vx, Vy с первого и второго выходов преобразователя 8-2 координат поступают соответственно на вычитающие входы второй 5-2 и третьей 5-3 схем вычитания. Разности проекций путевой скорости Wx=Wsin(ИК-ΨК+УС) на суммирующем входе схемы 5-2 вычитания и сигнала Vsin(ИК-ΨК) на ее вычитающем входе, также как разности проекций путевой скорости Wx=Wcos(ИК-ΨК+УС) на суммирующем входе схемы 5-3 вычитания и сигнала Vcos(ИК-ΨК) на вычитающем входе схемы 5-3 образуют соответственно сигналы Ux,Uy, пропорциональные проекциям скорости ветра, поступающие на первую 9-1 и вторую 9-2 ячейки памяти и вторые входы компараторов 16-1 и 16-2. Сравнение оценок проекций скорости ветра
сигналы, пропорциональные проекциям вектора V воздушной скорости на оси X, Y условной прямоугольной ортодромической системы координат. Переключатели 10-1, 10-2, в основном режиме работы системы, по третьим входам разомкнуты, так что выходные сигналы Vx, Vy с первого и второго выходов преобразователя 8-2 координат поступают соответственно на вычитающие входы второй 5-2 и третьей 5-3 схем вычитания. Разности проекций путевой скорости Wx=Wsin(ИК-ΨК+УС) на суммирующем входе схемы 5-2 вычитания и сигнала Vsin(ИК-ΨК) на ее вычитающем входе, также как разности проекций путевой скорости Wx=Wcos(ИК-ΨК+УС) на суммирующем входе схемы 5-3 вычитания и сигнала Vcos(ИК-ΨК) на вычитающем входе схемы 5-3 образуют соответственно сигналы Ux,Uy, пропорциональные проекциям скорости ветра, поступающие на первую 9-1 и вторую 9-2 ячейки памяти и вторые входы компараторов 16-1 и 16-2. Сравнение оценок проекций скорости ветра  ;
;  , поступающих соответственно на первые входы компараторов 16-1,16-2, как известных по метеоданным и вычисленных в устройстве контроля величин, с текущими вычисленными в пилотажно-навигационной системе значениями Ux,Uy, позволяет, с учетом известных точностных соотношений в исправно работающей системе, установить состояние исправности или отказа системы. Контроль охватывает всю систему от входных сигналов датчиков до выходных навигационных параметров, включает алгоритм ее работы.
, поступающих соответственно на первые входы компараторов 16-1,16-2, как известных по метеоданным и вычисленных в устройстве контроля величин, с текущими вычисленными в пилотажно-навигационной системе значениями Ux,Uy, позволяет, с учетом известных точностных соотношений в исправно работающей системе, установить состояние исправности или отказа системы. Контроль охватывает всю систему от входных сигналов датчиков до выходных навигационных параметров, включает алгоритм ее работы.
Устройство контроля пилотажно-навигационной системы в режиме "Память" работает следующим образом. Сигнал "Память", информирующий о некорректной работе датчика 1 путевой скорости и датчика 3 угла сноса, со второго выхода датчика 1 путевой скорости поступает на вторые управляющие входы первого 10-1 и второго 10-2 переключателей. Сигналы, пропорциональные проекциям путевой скорости Wx,Wy, не поступают на входы первого 11-1 и второго 11-2 интеграторов. Оценки проекций путевой скорости ,
,  , как суммы последних по времени t=tП вычисленных значений UхП, UyП и проекций Vx,Vy скорости ветра на выходах соответственно второго 4-2 Vsin(ИК-ΨК)+UxП, третьего 4-3 Vcos(ИК-ΨК)+UyП сумматоров, соответственно через первый 10-1 и второй 10-2 переключатели поступают на первый 11-1 и второй 11-2 интеграторы. Проинтегрированные сигналы суммируются с Х0 и Y0 начальными линейными перемещениями подвижного объекта, давая искаженные неточными оценками
, как суммы последних по времени t=tП вычисленных значений UхП, UyП и проекций Vx,Vy скорости ветра на выходах соответственно второго 4-2 Vsin(ИК-ΨК)+UxП, третьего 4-3 Vcos(ИК-ΨК)+UyП сумматоров, соответственно через первый 10-1 и второй 10-2 переключатели поступают на первый 11-1 и второй 11-2 интеграторы. Проинтегрированные сигналы суммируются с Х0 и Y0 начальными линейными перемещениями подвижного объекта, давая искаженные неточными оценками  ,
,  скорости ветра значения линейных перемещений
скорости ветра значения линейных перемещений  подвижного объекта. Это вызывает дополнительную неточность в получении значений оценок приращений ΔUx, ΔUy, поступающих на шестой 4-6 и седьмой 4-7 сумматоры. Последующее сравнение, последних запомненных до наступления режима "Память" значений проекций UхП, UyП, с оценками
подвижного объекта. Это вызывает дополнительную неточность в получении значений оценок приращений ΔUx, ΔUy, поступающих на шестой 4-6 и седьмой 4-7 сумматоры. Последующее сравнение, последних запомненных до наступления режима "Память" значений проекций UхП, UyП, с оценками  ;
;  позволяет кратковременно продолжить контроль системы.
позволяет кратковременно продолжить контроль системы.
Преобразователь 8-1,8-2 координат работает следующим образом. Функциональные преобразователи 15-3 и 15-4 реализуют тригонометрические функции соответственно sin и cos от сигнала на втором входе преобразователя 8-1,8-2 координат. Поскольку преобразователь 8-1, 8-2 координат реализует соотношения между его входными Х1, Х2 и выходными Y1, Y2 сигналами в виде Y1=X1sinX2; Y2=Х1cosX2. Для преобразователя 8-1 координат, имеющего на первом входе сигнал W путевой скорости, а на втором входе сигнал ИК-Φк+УС, пропорциональный углу между вектором W и осью Y условной прямоугольной ортодромической системы координат, получаем сигналы соответственно на первом и втором выходах: Wsin(ИК-ΨК+УС), Wcos(ИК-ΨК+УС), пропорциональные проекциям W на оси условной прямоугольной ортодромической системы координат. Для преобразователя 8-2 координат, имеющего на первом входе сигнал V путевой скорости, а на втором входе сигнал ИК-Ψк, пропорциональный углу между вектором V и осью Y условной прямоугольной ортодромической системы координат, получаем сигналы соответственно на первом и втором выходах: Vsin(ИК-ΨК), Vcos(ИК-ΨК), пропорциональные проекциям V на оси условной прямоугольной ортодромической системы координат. В последующем эти проекции Wx, Wy, Vx, Vy скоростей подвижного объекта используются для определения проекций вектора скорости ветра.
Как следует из вышеизложенного, решена основная задача, на решение которой направлены заявленный способ и устройство, а именно создание аппаратурно безызбыточной автономной комплексной системы контроля повышенной точности, надежности, информационной производительности и достоверности контроля с высокими технико-экономическими показателями по весу, габаритам, энергопотреблению, стоимости, удобству ее эксплуатации на легком летательном аппарате.
Техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является повышение достоверности обнаружения отказа, информационной производительности, точности контроля параметров с автономными безызбыточными средствами минимального веса, габаритов, энергопотребления, сложности и стоимости при одновременном повышении эффективности выполнения полетных задач. При этом обеспечивается работа как в полетном, так и предполетном состоянии комплекса, контроль по безынерционным соотношениям, содержащим простейшие арифметические операции, достаточно просто реализуемым на борту летательного аппарата.
Сопоставление параметров, характеризующих заявляемое изобретение, прототип и аналог позволяет сделать выводы. Достоверность контроля, как вероятность обнаружения отказа именно пилотажно-навигационного комплекса, а не средств контроля для автоматизированной метеорологической информационно-измерительной системы (АМИИС) ТАМИИС=1.41⋅105÷3,15⋅105 ч при РАМИИС(26280)=0,83÷0,92 [14], программного модуля обмена ТПМ=15000 ч, РПМ=0,999867 [3, с. 373] с надежностью устройства РУК=0,999853, получается в цифровом варианте исполнения РД4(2)=0,98516, ТД4=134 ч. Это в 28 раз больше, чем в аналоге НВУ-Б3 и в 67 раз больше, чем в прототипе с астроориентацией для НИ-50. Надежность заявляемого пилотажно-навигационного комплекса с устройством контроля Т C4=203 ч больше, чем у аналога ТС2=136 ч и прототипа ТС3=64 ч. Среднее время наработки на отказ в 1,5 раза больше для комплекса с заявляемым устройством контроля. Информационная производительность IПНК=0,6964 бит/с. Вес цифровой реализации заявляемого устройства контроля пилотажно-навигационного комплекса М4=0,1 кг (программируемый модуль обмена [3, с. 373]), что, как минимум, в 940 раз меньше аналогичного по назначению веса аналога - РСБН или в 290 раз меньше, чем у прототипа с астроориентатором от СП-1. Габариты заявляемого устройства 0,13 дм3, потребляемая мощность 0,5 Вт, что много меньше габаритов и мощности у аналога (49 дм3; 300 Вт. + 400 ВА) и прототипа (125 Вт). Точность контроля заявляемого устройства по скорости ветра составляет около 2% [9, с. 314; 15. с. 46; 17, с. 228] что соизмеримо и лучше, чем точность контроля аналога РСБН (в НВУ-Б3) 2,1-4% [15, с. 67, 81] и прототипа с астроориентацией (для НИ-50) 2-2,5% [16, с. 249] по диапазону счисления. Это приводит к меньшему среднему времени обнаружения отказа на 0,8 часа в заявляемом устройстве контроля. Физический смысл выигрыша по времени обусловлен большим быстродействием срабатывания компараторов, проверяющих скоростные процессы в заявляемом способе и устройстве, чем в аналоге и прототипе, где сравниваемые устройства контроля настроены на накопленную допустимую ошибку системы счисления по дальности. Контроль аппаратно безызбыточный и автономный, обладает 100% полнотой проверки всех элементов пилотажно-навигационного комплекса, максимально использует для реализации контроля существующие датчики и вычислительные средства проверяемого комплекса. Использует ранее не задействованные резервы проверяемой системы, физические принципы ее работы в основном режиме и режиме "Память". Применение заявленного способа для определения скорости внешней среды объекта открывает дополнительные возможности и по составлению карт морских течений в гидрографической службе флота, контроле систем счисления пути подводных лодок. При передаче и обмене информации о скорости ветра на маршрутах с борта самолета/ов по сети ИНТЕРНЕТ возможно улучшение точности контроля и создание глобальной метеоинформационной службы, что особенно важно для труднодоступных районов Земли.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее способ и устройство-изобретение при его осуществлении, предназначено для использования в авиационной технике и, в частности, для комплексного контроля пилотажно-навигационных комплексов пилотируемых и беспилотных, пассажирских и транспортных самолетов. Оно может использоваться для определения исправности большого числа датчиков и систем самолета в полете и на стадии его предполетной проверки;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Боднер В.А. Системы управления летательными аппаратами. М.: Машиностроение, 1973. 506 с.
2. Голинкевич Т.А. Оценка надежности радиоэлектронной аппаратуры. М.: Советское радио, 1969, 176 с.
3. Авионика России. Энциклопедический справочник. / Под ред. С.Д. Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999, 780 с.
4. Вульфов А. Широкофюзеляжные ",ИЛЫ" // Авиация и космонавтика, №1, 2 2002.
5. Сейдж Э.П., Уайт Ч.С. Оптимальное управление системами. М.: Радио и связь, 1982, 392 с.
6. Дмитриев С.П., Колесов Н.В., Осипов А.В. Информационная надежность, контроль и диагностика навигационных систем. СПб.: ГНЦ РФ-ЦНИИ Электроприбор, 2003, 207 с.
7. Нейрокомпьютеры в космической технике / Под ред. В.В. Ефимова. Кн. 17. М.: Радиотехника, 2004, 302 с.
8. Липчин Ц.Н., Липчин Л.Ц. Надежность самолетных навигационно-вычислительных устройств. М.: Машиностроение, 1973, 196 с.
9. Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992, 399 с.
10. Лебедев О.Н. Микросхемы памяти и их применение. М.: Радио и связь, 1990. 160 с.
11. Блудов А.А., Колтышев Е.Е., Минкин Д.Ю. Радиолокационные методы навигации по картам местности. СПб.: ВЛАДОС, 2011, 208 с.
12. Аналоговые и цифровые интегральные микросхемы: Справочное пособие / С.В. Якубовский, Н.А. Барканов, Л.И. Ниссельсон и др. / Под ред. С.В. Якубовского. М.: Радио и связь, 1984 г., с. 432.
13. Смолов В.Б. Функциональные преобразователи информации. Л.: Энергоиздат, 1981. с. 248.
14. www.LENTA.RU, от 24.04.2015. Фактическую погоду экипаж узнал по телефону знакомых. Нужны ли России авиационные метеорологи?
15. Козарук В.В. Навигационно-пилотажный комплекс самолета ТУ-154 и его эксплуатация. М.: Машиностроение, 1993, с. 320.
16. Денисов В.Г. Навигационное оборудование летательных аппаратов. М.: Оборонгиз, 1963, с. 383.
17. Олянюк П.В., Астафьев Г.П., Грачев В.В. Радионавигационные устройства и системы гражданской авиации. М.: Транспорт, 1983, с. 320.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2009 |
|
RU2393429C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2014 |
|
RU2546076C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Контрольно-проверочный комплекс систем прицельно-навигационного пилотажного комплекса самолёта | 2022 |
|
RU2799116C1 |
Группа изобретений относится к способу и устройству контроля пилотажно-навигационного комплекса. Для контроля пилотажно-навигационного комплекса непрерывно вычисляют на борту объекта его местоположение, текущие значения горизонтальных проекций вектора скорости ветра в условной прямоугольной системе координат, сравнивают их с предварительно вычисленными оценками по метеопрогнозу на маршруте полета объекта, фиксируют отказ пилотажно-навигационной системы при появлении существенных отличий при сравнении значений. Устройство контроля содержит датчики путевой и воздушной скорости, датчик угла сноса, семь сумматоров, три схемы вычитания, датчик курса, задатчик угла карты, два преобразователя координат, две ячейки памяти, два переключателя, два интегратора, два задатчика координат, индикатор, задатчик ветра, два функциональных преобразователя, два компаратора, логическую схему ИЛИ, соединенные определенным образом. Преобразователь координат содержит два функциональных преобразователя, два умножителя. Обеспечивается повышение достоверности обнаружения отказа пилотажно-навигационного комплекса, точность контроля параметров. 2 н. и 1 з.п. ф-лы, 3 ил. 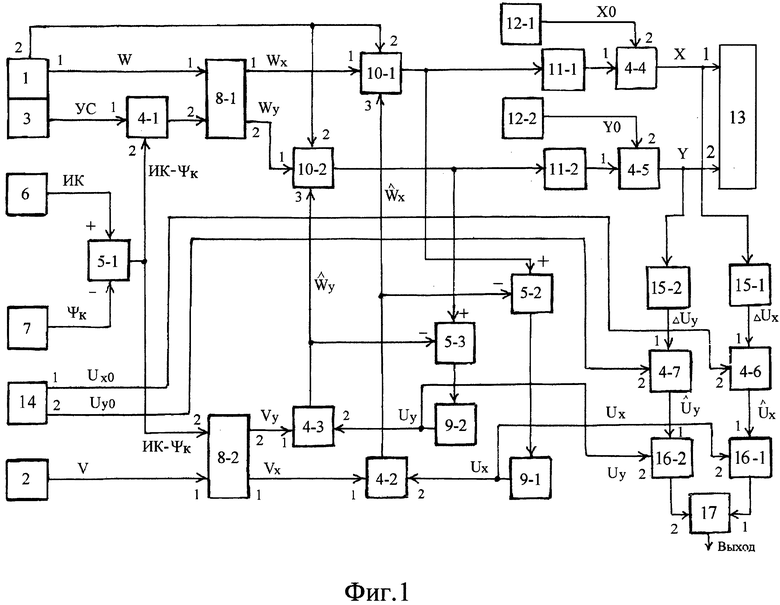
1. Способ контроля пилотажно-навигационного комплекса, заключающийся в непрерывном вычислении на борту подвижного объекта его местоположения, текущих значений горизонтальных проекций вектора скорости ветра в условной прямоугольной системе координат с последующим сравнением этих проекций с их предварительно вычисленными оценками по метеопрогнозу на маршруте полета объекта, отличающийся тем, что при появлении существенных отличий вычисленных текущих значений горизонтальных проекций вектора скорости ветра с их оценками по метеопрогнозу в непрерывно вычисляемых точках маршрута фиксируется отказ пилотажно-навигационной системы.
2. Устройство контроля пилотажно-навигационного комплекса, содержащее первый преобразователь координат, первый вход которого соединен с первым выходом датчика путевой скорости, второй вход через первый сумматор - с выходом датчика угла сноса, первый выход первого преобразователя координат соединен с первым входом первого переключателя, второй его выход - с первым входом второго переключателя, второй управляющий вход которого, как и второй управляющий вход первого переключателя, соединены со вторым выходом датчика путевой скорости, второй вход первого сумматора соединен с выходом первой схемы вычитания, суммирующим входом подключенной к выходу датчика курса, а вычитающим входом - к выходу задатчика угла карты, второй преобразователь координат, первый вход которого соединен с выходом датчика воздушной скорости, второй вход - с выходом первой схемы вычитания, первый выход второго преобразователя координат - через второй сумматор соединен с третьим входом первого переключателя и вычитающим входом второй схемы вычитания, выход которой через первую ячейку памяти соединен со вторым входом второго сумматора, второй выход второго преобразователя координат - через третий сумматор соединен с третьим входом второго переключателя и вычитающим входом третьей схемы вычитания, выход которой через вторую ячейку памяти соединен со вторым входом третьего сумматора, выход первого переключателя соединен с суммирующим входом второй схемы вычитания и входом первого интегратора, выход которого соединен с первым входом четвертого сумматора, второй вход которого соединен с выходом первого задатчика координат, а выход - с индикатором, выход второго переключателя соединен с суммирующим входом третьей схемы вычитания и входом второго интегратора, выход которого соединен с первым входом пятого сумматора, второй вход которого соединен с выходом второго задатчика координат, а выход - со вторым входом индикатора, отличающееся тем, что в устройство дополнительно введены задатчик ветра, последовательно соединенные первый функциональный преобразователь, шестой сумматор, первый компаратор и логическая схема ИЛИ, последовательно соединенные второй функциональный преобразователь, седьмой сумматор и второй компаратор, выход которого соединен со вторым входом логической схемы ИЛИ, выход которой является выходом устройства контроля, первый и второй выходы задатчика ветра соединены соответственно со вторыми входами шестого и седьмого сумматоров, входы первого и второго функциональных преобразователей соединены соответственно с выходами четвертого и пятого сумматоров, а вторые входы первого и второго компараторов соединены с выходами первой и второй ячейки памяти.
3. Устройство контроля пилотажно-навигационного комплекса по п. 2, отличающееся тем, что преобразователь координат содержит последовательно соединенные третий функциональный преобразователь, первый умножитель, другой вход которого соединен с первым входом преобразователя координат, а выход - с первым выходом преобразователя координат, последовательно соединенные четвертый функциональный преобразователь, второй умножитель, другой вход которого соединен с первым входом преобразователя координат, а выход - со вторым выходом преобразователя координат, входы третьего и четвертого функциональных преобразователей соединены со вторым входом преобразователя координат.
| Способ определения состояния навигационного оборудования воздушного судна | 1989 |
|
SU1764033A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| ЖАРОВАЯ ТРУБА ГАЗОВОЙ ТУРБИНЫ ГТД-110М | 2018 |
|
RU2701025C1 |
| US 20130274994 A1, 17.10.2013 | |||
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |

