Заявляемое изобретение относится к области маскировки, в частности, к техническим средствам имитации, обеспечивающим внезапное создание маски-помехи оптико-электронным и радиолокационным системам наведения высокоточного оружия (ВТО) в зоне расположения маскируемого объекта для эффективной его защиты от современных средств поражения ВТО.
Одним из способов противодействия наведению ВТО на расположенные на местности вооружение, военную и специальную технику (ВВСТ) является срыв наведения (прицеливания) системы наведения ВТО на последнем этапе наведения его на цель, за счет имитации ВВСТ и устройства ложных целей. Данный способ обеспечивает или смещение точки прицеливания боеприпаса во время его движения на последнем участке траектории, или перенацеливание боеприпаса на внезапно появившуюся в поле зрения системы наведения ВТО ложную цель. При этом ложная цель должна воспроизводить демаскирующие признаки (ДП) реальной военной техники в указанных диапазонах спектра длин электромагнитных волн (ЭМВ), а ее появление в поле зрения системы наведения ВТО необходимо обеспечить после установления факта наведения боеприпаса на реальную цель в срок до 10 секунд в среднем (исходя из тактико-технических характеристик современных ВТО).
В настоящее время для противодействия современным средствам обнаружения и распознавания реальных целей поражения применяемым ВТО широко применяются ложные объекты, оборудуемые как в ложных районах расположения войск, так и непосредственно в зоне расположения реальной ВВСТ относятся инженерные средства имитации ВВСТ, обеспечивающие при их применении имитацию ДП либо в тепловом (каталитическая фитильная печь КФП-1-180, имитатор Тепло-1), либо в радиолокационном (уголковые отражатели «ОМУ», «Угол», «Сфера», «Пирамида») диапазонах спектра ЭМВ [Наставление по военно-инженерному делу для вооруженных сил РФ. - М.: 2016 г., с. 104…107].
В качестве недостатка применения указанных известных средств инженерного вооружения (СИВ), принятых в качестве аналогов, можно отнести, прежде всего, то, что они обеспечивают имитацию ДП только в одном из диапазонов спектра длин ЭМВ (или только в ИК диапазоне спектра ЭМВ, или только в РЛ диапазоне спектра ЭМВ, причем не обеспечивая во времени внезапное проявление ДП ВВСТ, что чаще всего не позволяет достичь требуемой вероятности срыва наведения ВТО на военный наземный объект. При этом перевод их в рабочее положение и установка на местности осуществляются при помощи технических вспомогательных монтажных средств установки или вручную, что требует существенных затрат времени и сил.
Известно устройство и способ его применения для отражения радиоволн [патент RU 2163742 по классу H01Q15/00, опубл. 27.02.2001 г.], используемый в качестве быстроустанавливаемых на местности (акватории) пассивных радиолокационных знаков и других объектов, содержащий четырехсекционный уголковый отражатель с боковыми прямоугольными и нижней круглой гранью из радиоотражающего материала, стойку, заполненную материалом с положительным запасом плавучести, анкер и трос.
К недостаткам указанного отражателя относится то, что перевод его в рабочее положение и установка на местности осуществляются при помощи монтажных технических средств установки или вручную, что так же требует существенных затрат времени и сил. При этом имитация ДП ВВСТ в ИК диапазоне спектра длин ЭМВ не обеспечивается.
Известен радиолокационный имитатор движущейся военной техники [Кривелев В.А. и др. Маскировка войск и войсковых объектов: Учебник - М: ВИА, 1996, стр. 253], который применяется для имитации движения техники на маршрутах, в ложных районах расположения войск, на ложных переправах с целью противодействия радиолокационной разведке, включающий в себя 6 уголковых отражателей, кабель питания, электродвигатель, укладочный ящик.
К недостаткам указанного радиолокационного имитатора относится то, что он работает только в РЛ диапазоне спектра длин ЭМВ, а так же отсутствие автоматизированной системы управления устройствами внезапного изменения целевой обстановки, обеспечивающей своевременное создание на местности ложных объектов, создающих помехи для систем наведения ВТО на цель в зоне расположения одиночных и групповых объектов в реальном режиме времени, и обеспечивающих тем самым повышение живучести маскируемых одиночных или групповых объектов от современных средств ВТО.
Наиболее близким по своей технической сущности и конструкции к заявляемой полезной модели является «Автономный имитатор демаскирующих признаков наземных объектов для внезапного изменения целевой обстановки в целях противодействия ВТО» [патент RU 193373 по классу F41H 3/00, опубл. 28.10.2019], выбранный в качестве прототипа.
Согласно описания, автономный имитатор демаскирующих признаков применяется для противодействия системам наведения ВТО на ВВСТ в районе размещения одиночных и групповых объектов и имеет линейный актуатор с выдвигающимся штоком, обеспечивающим автоматическое раскрытие/закрытие уголкового рефлектора, при этом момент времени раскрытия/закрытия определяется автономной системой управления, состоящей из приемных датчиков обнаружения внешнего облучения имитируемого объекта передающими устройствами системы наведения высокоточного боеприпаса и устройства передачи команд, расположенных непосредственно на защищаемом объекте, а также устройства приема и обработки команд, расположенном на стойке уголкового рефлектора. К подвижному штоку актуатора, в его верхней части, жестко закрепляется фиксатор верхних углов четырех треугольных панелей, натяжение которых при их раскрытии обеспечивается строгим соответствием их линейных размеров и хода штока актуатора, а также ограничителями движения плеч рефлектора на неподвижно зафиксированной втулке, при этом движение актуатора обеспечивает автономный источник питания.
К основным недостаткам известного технического устройства, принятого в качестве прототипа, можно отнести:
- низкую (недостаточную) эффективность отражения радиоволны отражающей поверхностью уголкового рефлектора в сторону радиолокационной станции, вследствие низкого его расположения относительно подстилающего слоя поверхности земли;
- экранирование радиоволны, отраженной отражающей поверхностью уголкового рефлектора (отражателя) травой, кустарниками или местными предметами, т.к. высота уголкового рефлектора (отражателя) менее 60λ (где λ - длина волны радиолокационной станции противника, т.е. при длине волны 3,2 см, высота подвеса должна быть не менее 2 м);
- отсутствие возможности изменения положения уголкового рефлектора отражателя вокруг своей оси относительно радиолокационной станции, что снижает достоверность принятия ложной цели за действительную в качестве маски-помехи при имитации движения техники.
Таким образом, рассмотренные известные устройства по своему конструктивному решению не позволяют достичь требуемого результата по обеспечению требуемой эффективности противодействия системам наведения ВТО на одиночный или групповой объект одновременно в ИК и РЛ диапазонах спектра длин ЭМВ.
Задача заявляемого изобретения заключается в повышении эффективности обеспечения противодействия ВТО с тепловыми и радиолокационными системами наведения на последнем участке его траектории полета, за счет перенацеливания ВТО на внезапно создаваемую ложную цель, состоящую из одиночной или групповой движущейся военной техники, имитирующей видовые демаскирующие признаки и признаки деятельности реальной движущейся военной техники в ИК и РЛ диапазонах спектра длин ЭМВ.
Технический результат достигается тем, что имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО состоит из находящихся в функционально-конструктивном единстве двух уголковых рефлекторов с системой устройств автономного управления имитатора, обеспечивающими определение момента времени начала имитации демаскирующих признаков военной техники одновременно в ИК и РЛ диапазонах спектра длин ЭМВ при нахождении боеприпаса с тепловой и радиолокационной головкой самонаведения ВТО на последнем участке траектории его полета, за счет приведения в рабочее состояние уголковых рефлекторов с автоматическим механизмом их раскрытия-закрытия и вращения вокруг своей оси с нагревом гибких ИК-нагревателей посредством электродвигателя во взаимодействии с червячным механизмом поворотной платформы.
Поставленная задача достигается тем, что в имитаторе демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО, включающем в себя уголковые рефлекторы, линейные актуаторы с выдвигающимися штоками, в верхней части которых жестко закреплены фиксаторы верхних углов четырех треугольных панелей, выполненных из радиоотражающего гибкого материала, систему автономного управления, состоящую из приемных датчиков обнаружения внешнего облучения имитируемого объекта передающими устройствами системы наведения высокоточного боеприпаса и устройства передачи команд, расположенных непосредственно на защищаемом объекте, а также устройства приема и обработки команд, расположенном на стойке уголкового рефлектора, объединенные проводной/беспроводной линией передачи команд к подвижному штоку актуатора:
Во-первых, имитатор содержит соответственно два уголковых рефлектора и линейных актуатора с выдвигающимися штоками, в котором для крепления и вращения вокруг своей оси в рабочем положении линейных актуаторов с уголковыми рефлекторами устройство дополнительно снабжено регулируемыми по высоте двумя выдвижными штангами с лапами, обе лапы которых жестко закреплены сверху фиксаторами к каждому основанию линейных актуаторов, а выдвижные штанги снизу подвижно закреплены фиксаторами к кронштейнам, привинченным накидными гайками к поворотным платформам, которые соединены с валом, приводимым в движение с вращением линейных актуаторов с уголковыми рефлекторами вокруг своей оси посредством червячной передачи электродвигателем с двумя валами, размещенным внутри ящика имитатора, выполненного из армированного стекловолокна. При этом выше перечисленные конструктивные узлы устройства, за исключением электродвигателя, в рабочем положении установлены на корпусе ящика имитатора относительно друг друга зеркально с двумя линейными актуаторами, снабженными уголковыми рефлекторами на расстоянии, обеспечивающими свободное вращение каждого линейного актуатора вокруг своей оси с раскрытыми уголковыми рефлекторами. Причем для транспортировки имитатора в нерабочем положении, внутри ящика имитатора выполнена ниша, в которой размещаются снятые с верхней горизонтальной плоскости корпуса ящика имитатора разобранные отдельные конструктивные элементы двух линейных актуаторов с уголковыми рефлекторами, двух кронштейнов и двух выдвижных штанг с лапами.
Во-вторых, в качестве материала, из которого изготовлены треугольные панели обеих уголковых рефлекторов, применена радиотехническая ткань, а грани уголковых отражателей изготовлены из пластмассы (производные полихлорвинила) покрытой металлизированным слоем.
В-третьих, поверх радиотехнической ткани, из которой изготовлена рабочая поверхность уголковых рефлекторов, дополнительно приварены пленочные гибкие инфракрасные обогреватели, подключенные к источнику питания, нагрев которых обеспечивает проявление демаскирующих признаков в тепловом диапазоне спектра ЭМВ для обеспечения противодействия ВТО с инфракрасной головкой самонаведения.
В-четвертых, источник питания каждого уголкового рефлектора выполнен в виде автономного, и/или общего источника питания, в качестве которого применен малогабаритный дизельный или бензиновый генератор.
Сущность технического решения, заявляемого изобретения приведена на фиг. 1, 2, 3, 4.
На фиг. 1 приведена принципиальная структурная схема имитатора демаскирующих признаков подвижной военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО, поясняющая принцип его работы, где:
1 - наземный подвижный объект; 2 - уголковый рефлектор; 3 - датчики обнаружения радиолокационного/инфракрасного облучения наземного подвижного объекта системой наведения ВТО; 4 - устройство приема, обработки и передачи команд; 5 - проводная/беспроводная линия управления линейным актуатором; 6 - кронштейн; 7 - выдвижная штанга; 8 - лапа; 9 - линейный актуатор; 10 - питающий кабель; 11 - накидные гайки крепления кронштейна; 21 - ящик имитатора.
На фиг. 2 показано конструктивное техническое решение имитатора демаскирующих признаков подвижной военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО, где:
1 - наземный подвижный объект; 2 - уголковый рефлектор; 3 - датчики обнаружения радиолокационного/инфракрасного облучения объекта системой наведения ВТО; 4 - устройство приема, обработки и передачи команд; 5 - проводная/беспроводная линия управления линейным актуатором; 6 - кронштейн; 7 - выдвижная штанга; 8 - лапа; 9 -линейный актуатор; 10 -питающий кабель; 11 - гайки крепления кронштейна; 12 - поворотная платформа; 13 - крепление подшипника; 14 - подшипники; 15 - вал поворотной платформы; 16 - червячный редуктор; 17 - соединительная муфта; 18 - вал электродвигателя; 19 - шестерня червячного механизма; 20 - электродвигатель; 21 - ящик имитатора; 26 - ниша для транспортировки в не рабочем положении 2-х линейных актуаторов с уголковыми рефлекторами, двух кронштейнов и двух выдвижных штанг с лапами.
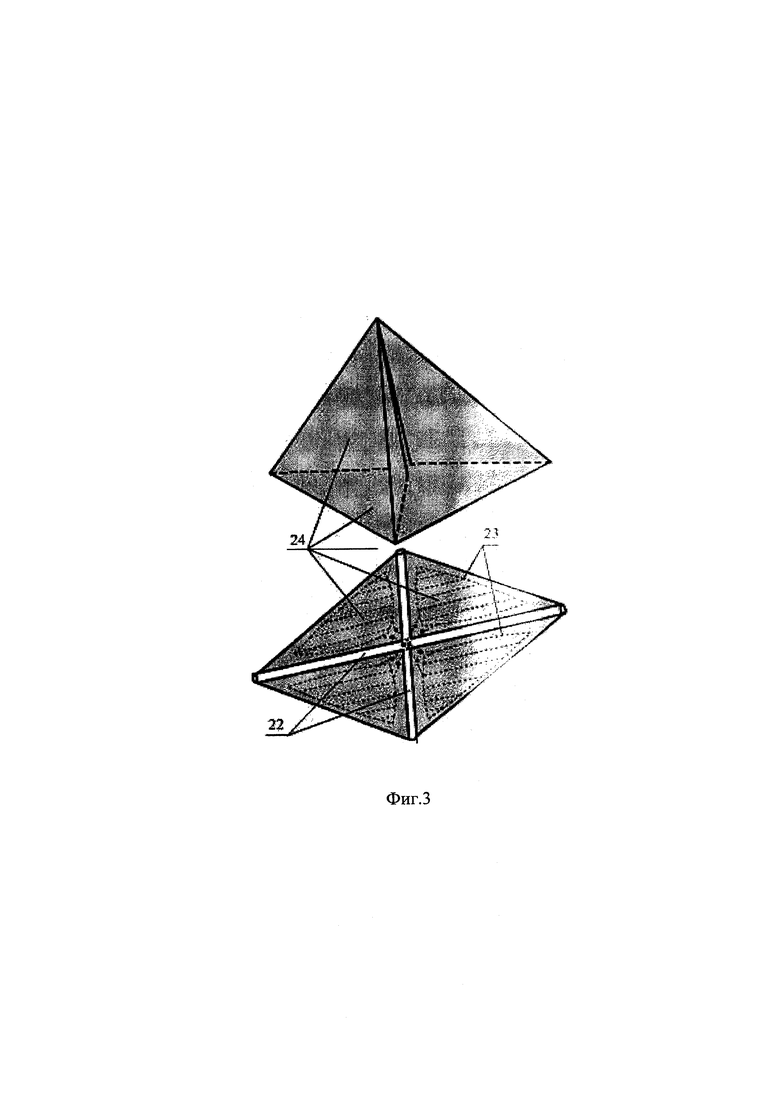
На фиг. 3 показан внешний вид технического решения горизонтальной и вертикальных панелей уголкового рефлектора, где:
22 - грани уголкового рефлектора; 23 - пленочный гибкий инфракрасный нагреватель; 24 - элементы радиотехнической ткани.
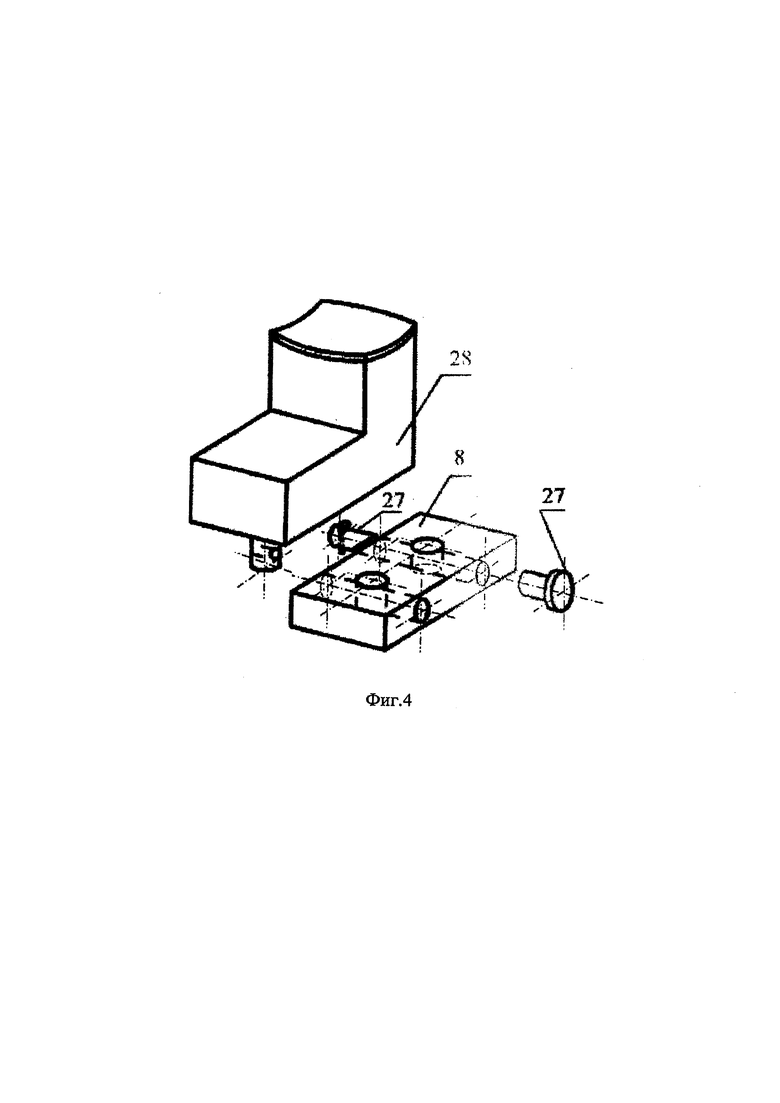
На фиг. 4 показано техническое решение соединения крепления основания линейного актуатура к фиксатору лапы выдвижной штанги, где:
8 - лапа; 27 - фиксаторы; 28 - основание линейного актуатора.
В функциональное рабочее положение имитатор демаскирующих признаков подвижной военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО приводится следующим образом.
Силами экипажа (расчета) подвижного военного объекта ящик имитатора 21 устанавливается на ровную подстилающую поверхность местности на безопасном удалении от стационарно расположенного на местности замаскированного наземного подвижного объекта 1. Затем из транспортной ниши 26 ящика имитатора 21 изымаются 2 линейных актуатора 9 с уголковыми рефлекторами 2, двумя кронштейнами 6 и двумя выдвижными штангами 7 с лапами 8 и конструктивно последовательно собираются на корпусе ящика имитатора 21 в рабочее положение, для чего обе выдвижные штанги 7 с лапами 8 снизу подвижно крепятся фиксаторами 27 к кронштейнам 6, которые привинчивается накидными гайками крепления кронштейнов 11 к поворотным платформам 12, которые соединяются с электродвигателем 20 с двумя валами 18, приводящими посредством червячной передачи 16 в движение вращения вокруг своей оси установленные на лапах 8 оба линейные актуаторы 9 с закрепленными на них уголковыми рефлекторами 2, находящимися в функционально-конструктивном единстве с системой автономного управления с датчиками обнаружения радиолокационного/инфракрасного облучения объекта системой наведения ВТО 3 и устройством приема, обработки и передачи команд 4, осуществляемой по проводной/беспроводной линии управления 5 линейными актуаторами 9 с уголковыми рефлекторами 2.
При этом для обеспечения работоспособности управления линейными актуаторами 9 с установленными на них уголковыми рефлекторами 2 электродвигатель 20 наземного подвижного объекта 1 подключается к питательному кабелю 10.
Кроме того, как альтернатива, источник питания каждого уголкового рефлектора 2 может быть выполнен в виде общего источника питания, в качестве которого может быть применен малогабаритный дизельный или бензиновый генератор.
Описание принципа работоспособности заявляемого изобретения с получением сформулированного технического результата.
Как известно, в системах наведения ВТО реализованы следующие технические решения, позволяющие определять взаимное положение боеприпаса и цели:
- подсвет цели специфическим излучением, позволяющим боеприпасу опознать цель и скорректировать его отклонение;
- использование излучения цели во всем спектре диапазона длин волн;
- умение системы наведения идентифицировать оптическую или радиотехническую картину цели по величине наибольшего отраженного сигнала для выбора приоритетного объекта при наведении суббоеприпаса.
Принцип работы имитатора с системой автономного управления состоит в том, что для определения момента наведения управляемого суббоеприпаса ВТО на цель на последнем участке его траектории в заявляемом изобретении в систему автономного управления уголковыми рефлекторами 2 включены датчики 3, регистрирующие изменение электромагнитной обстановки или изменение режима работы РЛ системы наведения ВТО, а также регистрирующих инфракрасное облучение наземного объекта 1.
Датчики 3 фиксирует облучение наземного подвижного объекта 1 радиолокационной станции системы наведения управляемого суббоеприпаса на цель на последнем этапе его траектории или работу оптико-электронной системы наведения ВТО, передает данные на устройство приема, обработки и передачи команд 4. Устройство приема, обработки и передачи команд 4 определяет момент времени, в который необходимо произвести имитацию, и передает команду по проводной/беспроводной линии управления 5 на подачу электроснабжения линейного актуатора 9, приводя его в действие, обеспечивая раскрытие уголкового рефлектора 2 и нагрев пленочного гибкого инфракрасного обогревателя 23. Линейный актуатор 9 подбирается таким образом, чтобы расстояние от подстилающей поверхности фона местности до граней раскрытого уголкового рефлектора 2 было не менее 2 м, а скорость полного раскрытия уголкового рефлектора 2 составляла не более 10 с, что обеспечит появление в поле зрения системы наведения ВТО двух целей: замаскированной реальной цели и ложной цели. Одновременно с электроснабжением линейного актуатора 9 происходит запуск электродвигателя 20, который передает крутящий момент валам электродвигателя 18 и посредством муфт 17 приводит в действие червячный редуктор 16 и к вращению шестерен 19. Шестерни 19 передают вращение на вал поворотной платформы 15, тем самым обеспечивая вращение поворотных платформ 12, которые посредством кронштейна 6, выдвижных штанг 7 и лап 8 вращают линейный актуатор 9 с уголковым рефлектором 2 вокруг своей оси с частотой 70 об/мин. Электроснабжение пленочного гибкого инфракрасного обогревателя 23, линейного актуатора 9, электродвигателя 20 производится по кабелю питания 10, от бортовой сети наземного подвижного объекта 1.
При этом, питание имитатора демаскирующих признаков военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО может осуществляться как от бортовой сети наземного объекта 1, так и от дизельного/бензинового генератора, или от автономного источника электроэнергии (не показаны на фигурах).
Оценка эффективности применения стационарно расположенного на местности заявляемого имитатора демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО производилась путем имитационного моделирования по разработанной авторами методике [Автономный имитатор демаскирующих признаков наземных объектов для внезапного изменения целевой обстановки в целях противодействия ВТО, патент на полезную модель РФ №193373, опубликован 2019 г.].
Расчеты проводились при следующих допущениях:
- в качестве наземного объекта принят танк Т-90, замаскированный табельными средствами маскировки;
- ширина диаграммы направленности -25 град.;
- расчетное ВТО - ПТУР AGM-114L «Longbow Hellfire» с активной радиолокационной головкой самонаведения (АРЛГСН);
- подстилающий фон - «зеленый луг» с удельной эффективной площадью рассеяния (ЭПР) фона σф=0,003 м2; отношение ЭПР создаваемой ложной цели к ЭПР маскируемого наземного объекта 
- вероятность обнаружения наземного объекта Робн=0,99;
- вероятность поражения цели одним боеприпасом Рп=0,99.
При применении имитатора демаскирующих признаков использовались следующие расчетные зависимости:
а) самонаведение ВТО на цель на конечном участке определяется следующими вероятностными процессами:
- вероятностью захвата истинной цели  ;
;
- вероятностью захвата ложной цели 
б) вероятность наведения ВТО с АРЛГСН на цель определялась по формуле:

Чтобы исключить возможность занижения тактико-технических характеристик ВТО и, соответственно, занизить требования к моделируемому средству маскировки наземного объекта принято допущение, что цель будет обнаруживаться и захватываться АРЛГСН с вероятностью близкой к 
Вероятность управления  обусловленной прежде всего показателями надежности узлов и агрегатов механизма управления и наведения ВТО, также считаем близкой к 1,0.
обусловленной прежде всего показателями надежности узлов и агрегатов механизма управления и наведения ВТО, также считаем близкой к 1,0.
Следовательно, вероятность наведения ВТО с АРЛГСН при применении заявляемого имитатора демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО в большей степени будет определяться вероятностью повторного захвата цели (реального объекта) на сопровождение:

Вероятность захвата цели ГСН определяется отношением мощности сигнала от цели к мощности сигнала от фона по зависимости:
где qc - отношение мощностей сигнал/фон; Рлт - уровень ложной тревоги.
Для боеприпасов с АРЛГСН отношение сигнал/шум на входе приемника определяется по формуле:
где σоб - ЭПР объекта, м2;  - удельная ЭПР фона; Н - высота полета ВТО, м; θ - ширина направленности антенны РЛС АРЛГСН, рад.
- удельная ЭПР фона; Н - высота полета ВТО, м; θ - ширина направленности антенны РЛС АРЛГСН, рад.
Отсюда следует, что вероятность наведения боеприпаса с АРЛГСН на действительную цель наземного объекта рассчитывается по формуле:

а вероятность наведения на имитатор демаскирующих признаков - по формуле:

где σпп - ЭПР имитатора демаскирующих признаков.
При захвате цели на сопровождение, полную группу событий, с учетом приведенных зависимостей (3), и (4) можно записать как [Вентцель Е.С. Теория вероятностей. - М.: Гос. изд. физ.-мат. лит-ры, 1962. - 564 с.]:

Если создается несколько ложных целей, то полная группа событий, с учетом приведенной зависимости (5) определяется как:

где Nл - число создаваемых ложных целей, при условии, что их энергетические характеристики, определяемые ЭПР, будут идентичными.
Очевидно, что соотношения (5) и (6) при расчете  по формулам (5) и (6) чаще всего выполняться не будут, поэтому необходим ввод нормировочного коэффициента kнорм:
по формулам (5) и (6) чаще всего выполняться не будут, поэтому необходим ввод нормировочного коэффициента kнорм:

исходя из условия 
Окончательный вид формулы для расчета вероятности наведения ВТО с АРЛГСН на цель при применении Nл числа ложных целей примет вид:

Результаты моделирования показали, что применение заявляемого имитатора движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО при выполнении условия, что отношение ЭПР создаваемой ложной цели к ЭПР маскируемого объекта  позволит снизить вероятность наведения
позволит снизить вероятность наведения  с 0,8 до 0,16, что в значительной мере обеспечивает противодействие ВТО с оптико-электронными и радиолокационными системами наведения на одиночный или групповой объект за счет применения внезапно появляющихся ложных целей в зоне наведения ВТО на замаскированную действительную цель, имитирующих демаскирующих признаков реального наземного объекта в ИК и РЛ диапазонах спектра длин ЭМВ.
с 0,8 до 0,16, что в значительной мере обеспечивает противодействие ВТО с оптико-электронными и радиолокационными системами наведения на одиночный или групповой объект за счет применения внезапно появляющихся ложных целей в зоне наведения ВТО на замаскированную действительную цель, имитирующих демаскирующих признаков реального наземного объекта в ИК и РЛ диапазонах спектра длин ЭМВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ИМИТАТОР ПОДВИЖНОГО НАЗЕМНОГО ВОЕННОГО ОБЪЕКТА | 2023 |
|
RU2805098C1 |
| Боеприпас-кассета для управляемого внезапного создания маски-помехи в зоне расположения маскируемого объекта | 2018 |
|
RU2702538C1 |
| Автономный имитатор демаскирующих признаков подвижных наземных военных объектов | 2024 |
|
RU2832146C1 |
| Индивидуальный комплект многоспектральных технических средств маскировки подвижных военных объектов с адаптивной системой управления физическими параметрами | 2022 |
|
RU2791934C1 |
| Комплексная имитационная маска | 2024 |
|
RU2828515C1 |
| Самоходный макет военной техники | 2022 |
|
RU2794932C1 |
| Способ формирования мишенного объекта, имитирующего старт воздушной цели в условиях ракетной позиции, аэродрома, необорудованной территории, и устройство для его осуществления | 2019 |
|
RU2759973C2 |
| КОМПЛЕКСНАЯ ИМИТАЦИОННАЯ МАСКА | 2022 |
|
RU2798448C1 |
| СПОСОБ ПОСТАНОВКИ МАСОК-ПОМЕХ, ВАРИАНТЫ ПНЕВМАТИЧЕСКИХ ОТРАЖАТЕЛЕЙ И БОЕПРИПАСОВ-КАССЕТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2247302C2 |
| Имитатор надводной и подводной цели | 2021 |
|
RU2761688C1 |
Изобретение относится к области маскировки, в частности, к техническим средствам имитации, обеспечивающим внезапное создание маски-помехи оптико-электронным и радиолокационным системам наведения высокоточного оружия (ВТО) в зоне расположения маскируемого объекта для эффективной его защиты от современных средств поражения ВТО. Имитатор содержит два уголковых рефлектора и линейные актуаторы с выдвигающимися штоками. Для крепления и вращения вокруг своей оси в рабочем положении линейных актуаторов с уголковыми рефлекторами устройство дополнительно снабжено регулируемыми по высоте двумя выдвижными штангами с лапами, обе лапы которых жестко закреплены сверху фиксаторами к каждому основанию линейных актуаторов, а выдвижные штанги снизу подвижно закреплены фиксаторами к кронштейнам, привинченным накидными гайками к поворотным платформам, которые соединены с валом, приводимым в движение с вращением линейных актуаторов с уголковыми рефлекторами вокруг своей оси посредством червячной передачи электродвигателем с двумя валами, размещенным внутри ящика имитатора, выполненного из армированного стекловолокна. Повышается эффективность обеспечения противодействия ВТО. 3 з.п. ф-лы, 4 ил.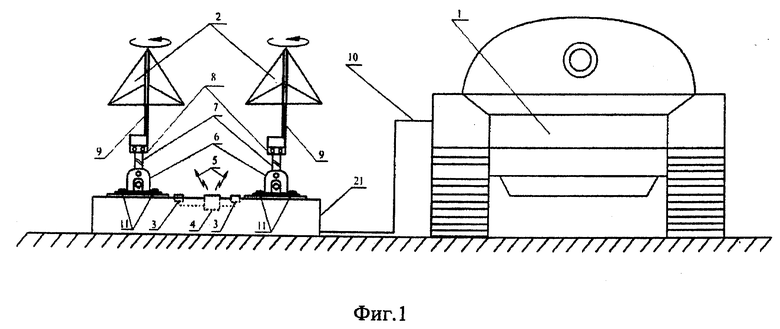
1. Имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО, включающий в себя уголковый рефлектор, линейный актуатор с выдвигающимся штоком, в верхней части которого жестко закреплен фиксатор верхних углов четырех треугольных панелей, выполненных из радиоотражающего гибкого материала, систему автономного управления, состоящую из приемных датчиков обнаружения внешнего облучения имитируемого объекта передающими устройствами системы наведения высокоточного боеприпаса и устройства передачи команд, расположенных непосредственно на защищаемом объекте, а также устройства приема и обработки команд, расположенном на стойке уголкового рефлектора, объединенные проводной/беспроводной линией передачи команд к подвижному штоку актуатора, отличающийся тем, что имитатор содержит соответственно два: уголковые рефлекторы и линейные актуаторы с выдвигающимися штоками, в котором для крепления и вращения вокруг своей оси в рабочем положении линейных актуаторов с уголковыми рефлекторами устройство дополнительно снабжено регулируемыми по высоте двумя выдвижными штангами с лапами, обе лапы которых жестко закреплены сверху фиксаторами к каждому основанию линейных актуаторов, а выдвижные штанги снизу подвижно закреплены фиксаторами к кронштейнам, привинченным накидными гайками к поворотным платформам, которые соединены с валом, приводимым в движение с вращением линейных актуаторов с уголковыми рефлекторами вокруг своей оси посредством червячной передачи электродвигателем с двумя валами, размещенным внутри ящика имитатора, выполненного из армированного стекловолокна, при этом выше перечисленные конструктивные узлы устройства, за исключением электродвигателя, в рабочем положении установлены на корпусе ящика имитатора относительно друг друга зеркально с двумя линейными актуаторами, снабженными уголковыми рефлекторами на расстоянии, обеспечивающими свободное вращение каждого линейного актуатора вокруг своей оси с раскрытыми уголковыми рефлекторами, причем для транспортировки имитатора в нерабочем положении, внутри ящика имитатора выполнена ниша, в которой размещаются снятые с верхней горизонтальной плоскости корпуса ящика имитатора разобранные отдельные конструктивные элементы двух линейных актуаторов с уголковыми рефлекторами, двух кронштейнов и двух выдвижных штанг с лапами.
2. Имитатор по п. 1, отличающийся тем, что в качестве материала, из которого изготовлены треугольные панели обоих уголковых рефлекторов, применена радиотехническая ткань, а грани уголковых отражателей изготовлены из пластмассы производных полихлорвинила покрытой металлизированным слоем.
3. Имитатор по п. 1, отличающийся тем, что поверх радиотехнической ткани, из которой изготовлена рабочая поверхность уголковых рефлекторов, дополнительно приварены пленочные гибкие инфракрасные нагреватели, подключенные к источнику питания, нагрев которых обеспечивает проявление демаскирующих признаков в тепловом диапазоне спектра ЭМВ для обеспечения противодействия ВТО с инфракрасной головкой самонаведения.
4. Имитатор по п. 1, отличающийся тем, что источник питания каждого уголкового рефлектора выполнен в виде автономного, и/или общего источника питания, в качестве которого применен малогабаритный дизельный или бензиновый генератор.
| 0 |
|
SU193373A1 | |
| СПОСОБ ПОЛУЧЕНИЯ ГЕРБИЦИДОВ | 0 |
|
SU154830A1 |
| DE 102011114574 A1, 04.04.2013 | |||
| US 6613420 B1, 02.09.2003. | |||

