Заявляемое изобретение относится к области маскировки, в частности, к средствам противодействия системам наведения высокоточного оружия (ВТО) на подвижные наземные военные объекты в районах их расположения.
Одним из способов противодействия системам наведения ВТО на подвижный наземный военный объект является внезапное изменение фоноцелевой обстановки в районах его расположения. Данный способ обеспечивает или смещение точки прицеливания высокоточного боеприпаса во время его движения на последнем участке траектории, или его перенацеливание на внезапно появившуюся в поле зрения системы наведения ВТО ложную цель, которая, при этом, должна воспроизводить демаскирующие признаки (ДП) подвижного наземного военного объекта в различных информационных физических полях и появляться в поле зрения системы наведения ВТО в срок до 12-15 секунд в среднем (исходя из тактико-технических характеристик современных образцов ВТО после установления факта наведения высокоточного боеприпаса на подвижный наземный военный объект.
В настоящее время для противодействия современным средствам обнаружения и распознавания широко используются ложные объекты, оборудуемые как в ложных районах расположения войск, так и непосредственно в зоне расположения реальных подвижных наземных военных объектов.
В качестве ложных объектов применяются известные инженерные средства имитации: макеты подвижных наземных военных объектов, тепловые имитаторы, радиолокационные уголковые отражатели и другие средства [1].
Макеты подвижных наземных военных объектов с различной степенью детализации применяются для их имитации в видимом диапазоне спектра длин электромагнитных волн (ЭМВ). Для создания ложных целей в инфракрасном (РЖ) диапазоне спектра длин ЭМВ применяются известная каталитическая фитильная печь КФП-1-180 и комплект тепловых излучений КТИ «Тепло-1», а в радиолокационном (РЛ) диапазоне спектра длин ЭМВ -известные уголковые отражатели, представляющие собой трехгранный угол, образованный перпендикулярными зеркально отражающими плоскостями, с гранями в форме квадрата, треугольника или сектора круга. К табельным уголковым отражателям относятся металлические отражатели «ОМУ», «Пирамида», «Угол», пневматический отражатель «Сфера-ПР» [2].
В качестве недостатков указанных известных инженерных средств имитации можно отметить прежде всего то, что они обеспечивают имитацию ДП подвижного наземного военного объекта только в одном-двух из диапазонов спектра длин ЭМВ (видимом, ИК или РЛ), а также то, что перевод их в рабочее положение и установка на местности осуществляются при помощи технических вспомогательных монтажных средств установки или вручную с существенными затратами времени и сил, никак не обеспечивая внезапное проявление ДП имитируемого подвижного наземного военного объекта и, следовательно, достижение требуемой вероятности срыва наведения ВТО на имитируемый подвижный наземный военный объект.
Воспроизведение ДП подвижного наземного военного объекта в других информационных физических полях, а именно сейсмических волн в поверхностном слое земли для имитации функционирующего подвижного наземного военного объекта в районе его расположения также не входит в функционал указанных известных инженерных средств имитации.
Известен автономный имитатор демаскирующих признаков наземных объектов для внезапного изменения целевой обстановки в целях противодействия ВТО [3].
К недостаткам указанного имитатора относится то, что он имеет недостаточную эффективность отражения радиоволн поверхностью уголкового рефлектора в сторону радиолокационной станции (РЛС) вследствие низкого расположения относительно подстилающего слоя поверхности земли и не имеет возможности изменения положения уголкового рефлектора отражателя вокруг своей оси относительно РЛС, что снижает достоверность принятия ложной цели за действительную при имитации движения подвижного наземного военного объекта. Наряду с этим, указанный имитатор не имеет функциональных возможностей генерировать имитирующие сейсмические волны, идентичные сейсмическим волнам функционирующего подвижного наземного военного объекта.
Известен электромагнитный источник сейсмических волн [4], который может быть использован для имитации функционирующего на месте подвижного наземного военного объекта при противодействии сейсмическим средствам наземной разведки, в частности разведывательно-сигнализационной аппаратуре (РСА), и системам наведения ВТО.
Основным недостатком известного устройства является, прежде всего, то, что оно не обладает возможностями по воспроизведению ДП подвижных наземных военных объектов одновременно в видимом, ИК и РЛ диапазонах спектра длин ЭМВ.
Известен комплект боеприпасов-кассет для управляемого внезапного резкоконтрастного распятнения или аэрозольного образования в зоне расположения маскируемого объекта [5].
Основным недостатком известного устройства является то, что его применение для внезапного изменения фоноцелевой обстановки в целях противодействия ВТО не обеспечивает воспроизведение видовых ДП, признаков деятельности и расположения на местности реального незамаскированного подвижного наземного военного объекта одновременно в видимом, ИК и РЛ диапазонах спектрах длин ЭМВ.
Известен «Радиолокационный имитатор ложной цели» [6].
Согласно описанию, имитатор может быть использован в качестве ложной цели, предназначенной для защиты объекта от систем радиолокационного обнаружения и распознавания. Радиолокационный имитатор ложной цели содержит сетчатую основу, в каждую ячейку из горизонтальных и вертикальных рядов которой вплетены гибкие ленты, изготовленные из полностью отражающего электромагнитные волны материала, окрашенного с одной стороны в цвет подстилающей поверхности для растительных, либо пустынно-степных фонов, а с другой стороны в белый цвет, спектральные характеристики которого близки к цвету снега, а также монтажные приспособления, обеспечивающие формирование имитирующего рельеф местности объема, имеющего форму, по меньшей мере, одного открытого к наружной поверхности уголкового отражателя, размеры которого выбраны в соответствии с параметрами рельефа местности.
Не смотря на достаточно небольшое время его развертывания, к основным недостаткам известного технического устройства, принятого в качестве аналога, можно отнести:
узкую направленность применения в качестве ложной цели, предназначенной для защиты объекта только от систем радиолокационного обнаружения и распознавания;
отсутствие возможности внезапного создания ложной цели, имитирующей ДП реального подвижного наземного военного объекта в районах его расположения одновременно в видимом и ИК диапазонах спектра длин ЭМВ, а также сейсмические волны функционирующего подвижного наземного военного объекта.
Известен способ коррекции функционального состояния биологического объекта и устройство для его осуществления [7], выбранный также в качестве аналога.
В зоне расположения биологического объекта с применением указанного известного устройства создается сконцентрированное поляризованное излучение. Вокруг этой зоны формируется экранированная от геомагнитного поля и поля токов тропосфера - Земля область. Устройство содержит проводники с деформацией кручения, выполненные в виде спиралей с основаниями и вершинами. Основания и вершины спиралей соединены между собой нелинейными элементами, соединенными с формирователем управляющего сигнала. Указанное изобретение относится к биологии и может быть использовано для коррекции функционального состояния биологического объекта и не применяется в области маскировки, в частности, как средство противодействия системам наведения ВТО на подвижные наземные военные объекты в районах их расположения.
Наиболее близким по своей технической сущности и конструктивному решению к заявляемому изобретению является «Автономный имитатор демаскирующих признаков наземных военных объектов» [8], выбранный в качестве прототипа.
Известная полезная модель относится к области маскировки, в частности, к техническим средствам имитации, обеспечивающим внезапное создание на местности, в зоне расположения скрываемых наземных военных объектов, ложной цели, имитирующей реальные ДП наземных военных объектов и может применяться для эффективной их защиты от современных оптико-электронных и радиолокационных систем наведения ВТО одновременно в видимом, ИК и РЛ диапазонах спектрах длин ЭМВ.
Техническая сущность полезной модели достигается тем, что установленный на поверхности грунта автономный имитатор ДП наземного военного объекта состоит из находящихся в функционально-конструктивном единстве трех блоков, которые выполнены с возможностью управления приемно-передающими и исполнительными функциями автономного имитатора, обеспечивающими определение момента времени последовательного приведения из транспортного положения баннера в рабочее положение, на внешнюю поверхность которого нанесено цветное 3D - изображение горизонтальной проекции имитируемого незамаскированного наземного военного объекта в масштабе 1:1 с видовыми ДП, признаками деятельности и расположения, для обеспечения перенацеливания оптико-электронной и радиолокационной системы наведения ВТО на последнем участке его траектории полета с головкой самонаведения с верхней полусферы со скрываемого наземного военного объекта на внезапно создаваемую ложную цель.
Вместе с тем, принятое в качестве прототипа известное устройство по своему конструктивному решению не позволяет обеспечить высоко эффективное противодействие системам наведения ВТО на подвижные наземные военные объекты в районах их расположения, так как по своему функционально-конструктивному единству:
не позволяет достичь требуемого результата Имитации подвижных наземных военных объектов, так как в период их функционирования на местности не обеспечивается управление изменением нагретых поверхностей техники с температурой от +40°С до 60°С и выше, что значительно может оказывать влияние на достоверность принятия ложного объекта за действительный объект в случае его обнаружения оптико-электронными системами наведения ВТО в ИК диапазоне спектра длин ЭМВ;
не имеет функциональных возможностей в комплексе с проявлением видовых ДП, признаков деятельности и расположения с проявлением ДП в других вышеуказанных диапазонах спектра длин ЭМВ генерировать имитирующие сейсмические волны, идентичные сейсмическим волнам функционирующего подвижного наземного военного объекта, что в целом достоверно не обеспечивает внезапное создание на местности, в зоне расположения скрываемых подвижных наземных военных объектов, ложной цели, имитирующей реальные ДП подвижных наземных военных объектов.
Задача изобретения заключается в повышении эффективности противодействия системам наведения ВТО на подвижный наземный военный объект в районе его расположения при применении автономного имитатора ДП подвижных наземных военных объектов, за счет достоверного перенацеливания боеприпаса ВТО на последнем участке его траектории движения с действительной цели поражения на внезапно создаваемую ложную цель, имитирующую видовые ДП и признаки деятельности в видимом, ИК РЛ диапазонах спектра длин ЭМВ, а также сейсмические волны, идентичные сейсмическим волнам функционирующего на местности подвижного наземного военного объекта.
Технический результат достигается тем, что установленный на поверхности грунта автономный имитатор ДП подвижных наземных военных объектов в районе расположения действительного замаскированных подвижных наземных военных объектов состоит из находящихся в функционально-конструктивном единстве четырех модулей, которые выполнены с возможностью управления приемно-передающими и исполнительными функциями автономного имитатора ДП подвижных наземных военных объектов, система которого обеспечивает обнаружение функционирующего на местности ложного подвижного наземного военного объекта средствами разведки и наведения ВТО и определение момента времени начала имитации им ДП подвижного наземного военного объекта для перенацеливания боеприпаса ВТО на последнем участке его траектории движения с действительной цели поражения на внезапно создаваемую ложную цель, имитирующую видовые ДП и признаки деятельности в видимом, ИК РЛ диапазонах спектра длин ЭМВ, а также сейсмические волны, идентичные сейсмическим волнам функционирующего на местности подвижного наземного военного объекта.
Поставленная задача достигается тем, что установленный на поверхности грунта имитатор демаскирующих признаков подвижных наземных военных объектов, содержащий сетчатую основу с закрепленным на ней гибким полимерным покрытием, изготовленным из отражающего электромагнитные волны материала, окрашенного в цвет подстилающей поверхности для растительных либо пустынно-степных фонов, а так же монтажные приспособления, обеспечивающие фиксацию гибкого перфорированного полимерного покрытия имитатора ложной цели на поверхности грунта:
во-первых, включает в себя функционально и конструктивно соединенные между собой четыре модуля, которые выполнены с возможностью управления приемно-передающими и исполнительными функциями автономного имитатора.
При этом, первый модуль выполнен в виде баннера с сетчатой электропроводящей основой с геометрическим размером ячеи 2,0×2,0 мм, по всей длине боковых сторон которого вплетены два троса, удерживающие его в горизонтальном рабочем положении, с одной торцевой стороны которого впрессована направляющая, жестко закрепленная винтами крепежными через хомуты накладные со свободными концами тросов, с внешней поверхности которого впрессован пленочный термонагреватель с регулируемой температурой от 40°С до 60°С, имитирующий прогрев участка поверхности наземного военного объекта, например, от функционирующего двигателя, и размещенный поверх сторон сетчатой электропроводящей основы баннера излучатель знакопеременных электрических импульсов, ионизирующих воздушную среду для конденсации водяных паров в приповерхностном слое с внутренней и внешней сторон поверхности перфорированного полимерного покрытия, на внешнюю поверхность которого нанесено цветное 3D-изображение горизонтального силуэта имитируемого незамаскированного подвижного наземного военного объекта в масштабе 1:1.
Второй и третий модули выполнены в виде плит из бакелитовой влагостойкой многослойной фанеры с монтажными отверстиями по периметру для анкеров и съемными защитными кожухами с соосно установленными на них (по две на каждую) плоскими опорными стойками с запрессованными в них подшипниками, в которые установлены соответственно, вал второго модуля и вал третьего модуля, при этом, по одному концу каждого троса жестко закреплены к валу третьего модуля, а на вал второго модуля посажены два шкива для намотки приемного конца троса, одновременно с этим, с одного торца каждого из валов посажен шкив клиноременной передачи для придания вращения от электродвигателя второго модуля со шкивом и электродвигателя третьего модуля со шкивом соответственно валу второго модуля и валу третьего модуля посредством клиноременной передачи для перевода первого модуля из исходного положения в рабочее и обратно, при этом фиксация положения первого модуля в рабочем и исходном положениях обеспечивается конечными выключателями.
Четвертый модуль выполнен в виде увязанных между собой единым функционально-конструктивным решением отдельных элементов с исполнительными и управляющими приемно-передающими функциями и включает в себя: автономный источник питания; генератор знакопеременных электрических импульсов; электромагнитный источник сейсмических волн; электродвигатель второго модуля со шкивом и электродвигатель третьего модуля со шкивом, обеспечивающие вращение соответственно вала второго модуля и вала третьего модуля посредством клиноременной передачи; основной блок управления; блок управления электродвигателем третьего модуля с автономным источником питания, которые в совокупности объединены силовыми и сигнальными связями посредством проводных и беспроводных линий управления;
во-вторых, автономная система управления имитатором демаскирующих признаков подвижных наземных военных объектов, определяющая момент времени перевода первого модуля из исходного положения в рабочее и обратно, состоит из пульта автономной системы управления имитатором демаскирующих признаков подвижного наземного военного объекта, включающего приемные датчики обнаружения внешнего облучения подвижного наземного военного объекта передающими устройствами системы наведения высокоточного боеприпаса и устройства принятия решения и выработки команд, и радиолинии управления, включающей в себя командно-передающее устройство и основной блок управления;
в-третьих, для воспроизведения сейсмических волн в поверхностном слое земли, идентичных сейсмическим волнам функционирующего на месте подвижных наземных военных объектов электромагнитный источник сейсмических волн содержит расположенную на поверхностном слое земли опорную плиту, выполненную из диэлектрического материала, на верхней плоскости опорной плиты по ее центральной оси приварен пригруз, с впрессованным на верхней плоскости пригруза индуктором электромагнита со встроенной в нем обмоткой возбуждения, при этом по обе стороны пригруза к опорной плите прикручены две жесткие стальные стойки с выполненными в верхней торцевой части полыми втулками с установленными в них упруго-эластичными элементами цилиндрической формы, на которые привинчена П-образная стальная балка с высотой П-образного профиля, равной наименьшей стороне опорной плиты и длинной, равной суммарной высоте пригруза и преобразователя электромагнитного типа, с ввинченным в нижнюю ее часть якорем, а к нижней плоскости опорной плиты перпендикулярно по ее центральной оси резьбовым соединением закреплена стальная труба с соотношением геометрических размеров ее длины к суммарной высоте пригруза и индуктора электромагнита 2:1, при этом конструктивно собранный электромагнитный источник сейсмических волн помещен в съемно-разъемный корпус, закрепленный к боковым плоскостям опорной плиты болтовым соединением, при этом для обеспечения работоспособности электромагнитного источника сейсмических волн встроенная в индукторе электромагнита обмотка возбуждения подсоединена по проводной связи к генератору импульсов тока с дросселем насыщения, конструктивно входящему в состав основного блока управления;
в-четвертых, для конденсации водяных паров на внутренней и внешней поверхностях перфорированного полимерного покрытия, за счет ионизации воздушной среды в приповерхностном слое с внутренней и внешней сторон поверхности перфорированного полимерного покрытия с образованием заряженных кластеров сконденсированных паров воды, излучатель знакопеременных электрических импульсов подключен к генератору знакопеременных электрических импульсов управляющих сигналов проводными линиями управления;
в-пятых, для получения устойчивого проявления демаскирующих признаков подвижных наземных военных объектов, в состав маскировочных красителей или пигментов, применяемых для защитного окрашивания перфорированного полимерного покрытия и нанесения на его внешнюю поверхность цветного 3D-изображения горизонтального силуэта имитируемого незамаскированного подвижного наземного военного объекта в масштабе 1:1, введено 5% водного состава гидрозоля катионов серебра с концентрацией серебра 12 мг/л водной дисперсии.
Сущность технического решения заявляемого изобретения приведена на фиг. 1, 2, 3, 4, 5, 6, 7, 8, 9.
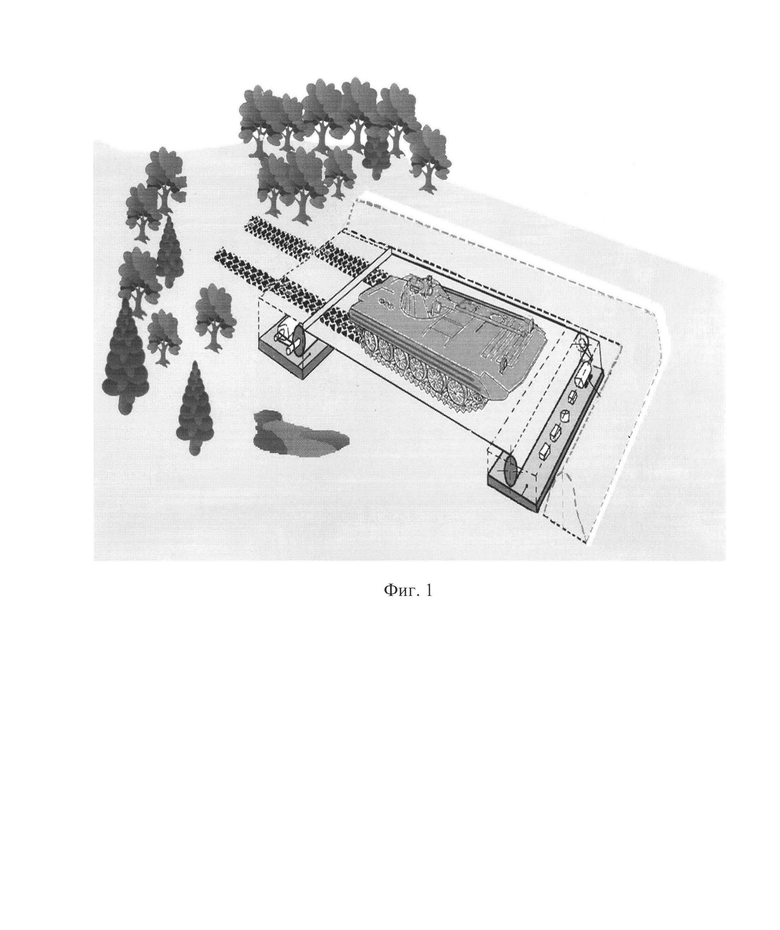
На фиг. 1 приведен общий вид имитатора ДП подвижного наземного военного объекта в рабочем положении, установленного на поверхности грунта в полупрофиле окопа с проявлением видовых ДП, признаков деятельности и расположения.
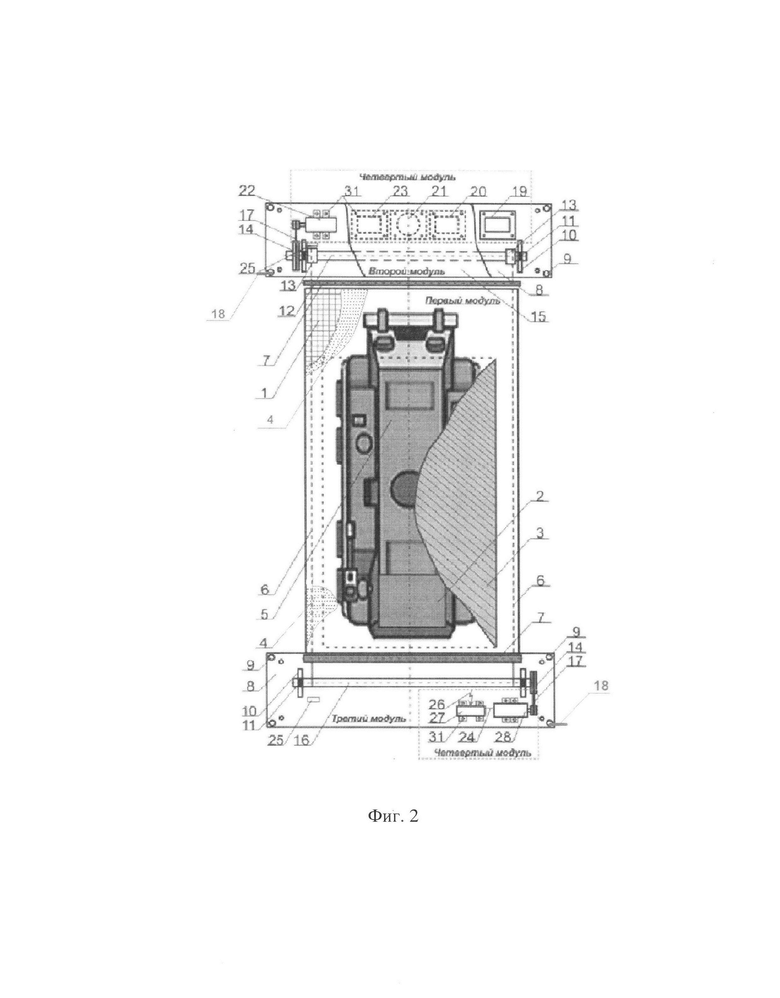
На фиг. 2 приведена принципиальная схема конструктивного технического решения имитатора ДП подвижного наземного военного объекта, включающего в себя функционально и конструктивно соединенные между собой четыре модуля, где:
1 - баннер с сетчатой электропроводящей основой; 2 - пленочный термонагреватель; 3 - излучатель знакопеременных электрических импульсов; 4 - перфорированное полимерное покрытие; 5 - цветное 3D-изображение горизонтального силуэта имитируемого незамаскированного подвижного наземного военного объекта; 6 - трос; 7 - направляющая; 8 - плита из бакелитовой влагостойкой многослойной фанеры; 9 - монтажное отверстие; 10 - плоская опорная стойка; 11 - подшипник; 12 - вал второго модуля; 13 - шкив для намотки приемного конца троса; 14 - шкив клиноременной передачи; 15 - съемный защитный кожух; 16 - вал третьего модуля; 17 - клиноременная передача; 18 - анкер; 19 - автономный источник питания; 20 - генератор знакопеременных электрических импульсов управляющего сигнала; 21 - электромагнитный источник сейсмических волн; 22 - электродвигатель второго модуля со шкивом; 23 - основной блок управления; 24 - проводные линии управления; 25 - конечный выключатель; 26 - беспроводные линии управления; 27 - блок управления электродвигателем третьего модуля с автономным источником питания; 28 - электродвигатель третьего модуля со шкивом; 31 - болтовое соединение.
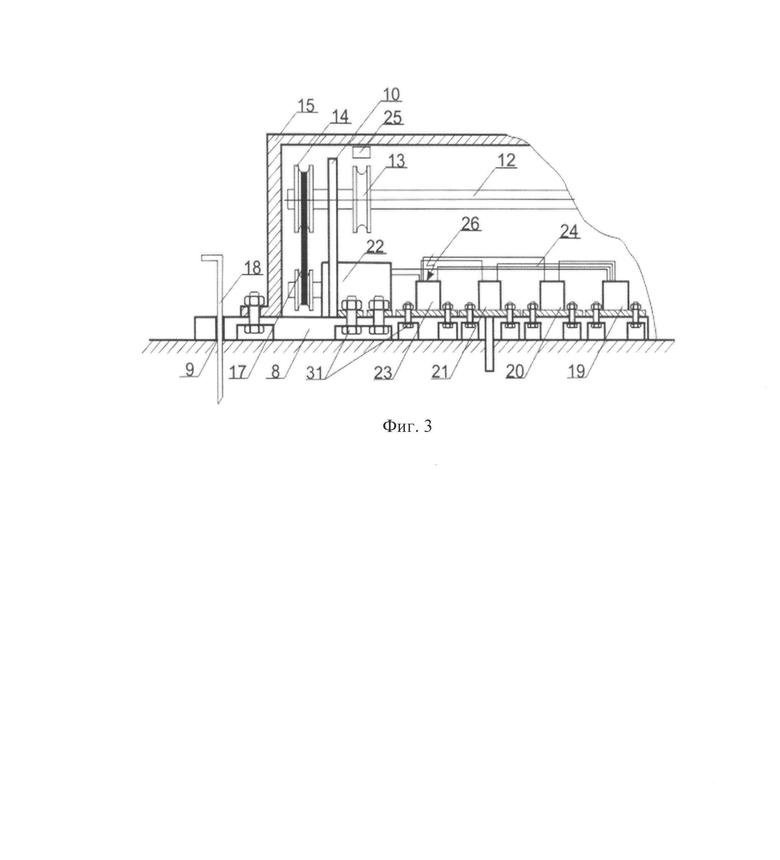
На фиг. 3 приведена принципиальная схема размещенных во втором модуле конструктивных элементов имитатора ДП подвижного наземного военного объекта, где:
8 - плита из бакелитовой влагостойкой многослойной фанеры; 9 -монтажное отверстие; 10 - плоская опорная стойка; 11 - подшипник; 12 - вал второго модуля; 13 - шкив для намотки приемного конца троса; 14 - шкив клиноременной передачи; 15 - съемный защитный кожух; 16 - вал третьего модуля; 17 - клиноременная передача; 18 - анкер; 19 - автономный источник питания; 20 - генератор знакопеременных электрических импульсов управляющего сигнала; 21 - электромагнитный источник сейсмических волн; 22 - электродвигатель второго модуля со шкивом; 23 - основной блок управления; 24 - проводные линии управления; 25 - конечный выключатель; 26 - беспроводные линии управления; 31 - болтовое соединение.
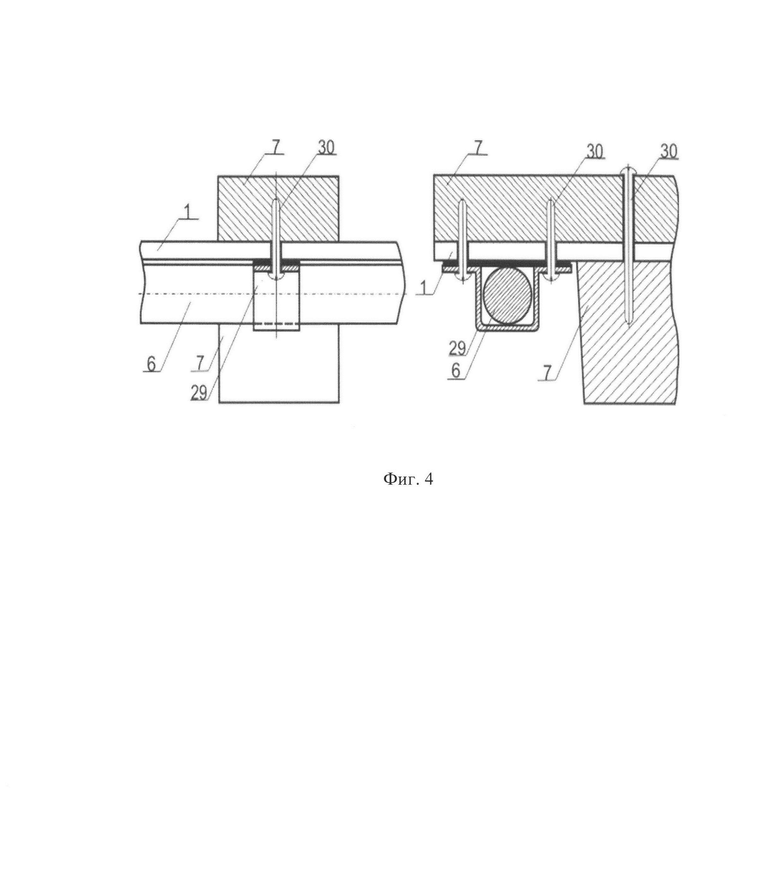
На фиг. 4 приведена принципиальная схема закрепления троса и направляющей к баннеру с сетчатой электропроводящей основой, где:
1 - баннер с сетчатой электропроводящей основой; 6 - трос; 7 -направляющая; 29 - хомут накладной; 30 - винт крепежный.
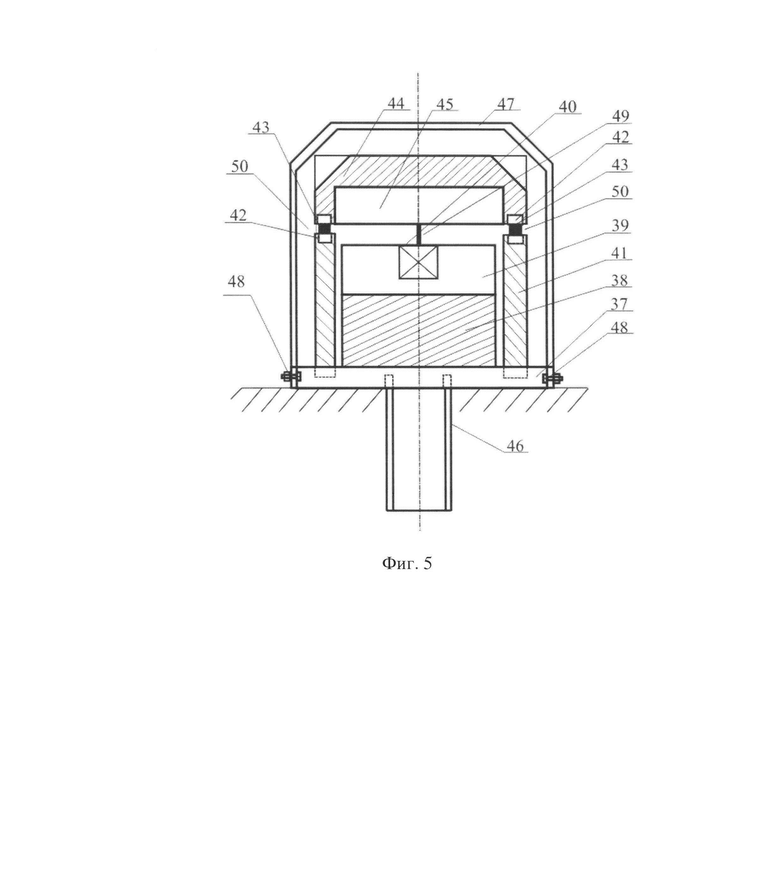
На фиг. 5 представлен внешний вид электромагнитного источника сейсмических волн, где:
37 - опорная плита; 38 - пригруз; 39 - индуктор электромагнита; 40 - обмотка возбуждения; 41 - жесткие стальные стойки; 42 - полые втулки; 43 - упруго-эластичный элемент; 44 - П-образная стальная балка; 45 - якорь; 46 - стальная труба; 47 - съемно-разъемный корпус; 48 - болтовое соединение; 49 - первый зазор; 50 - второй зазор.
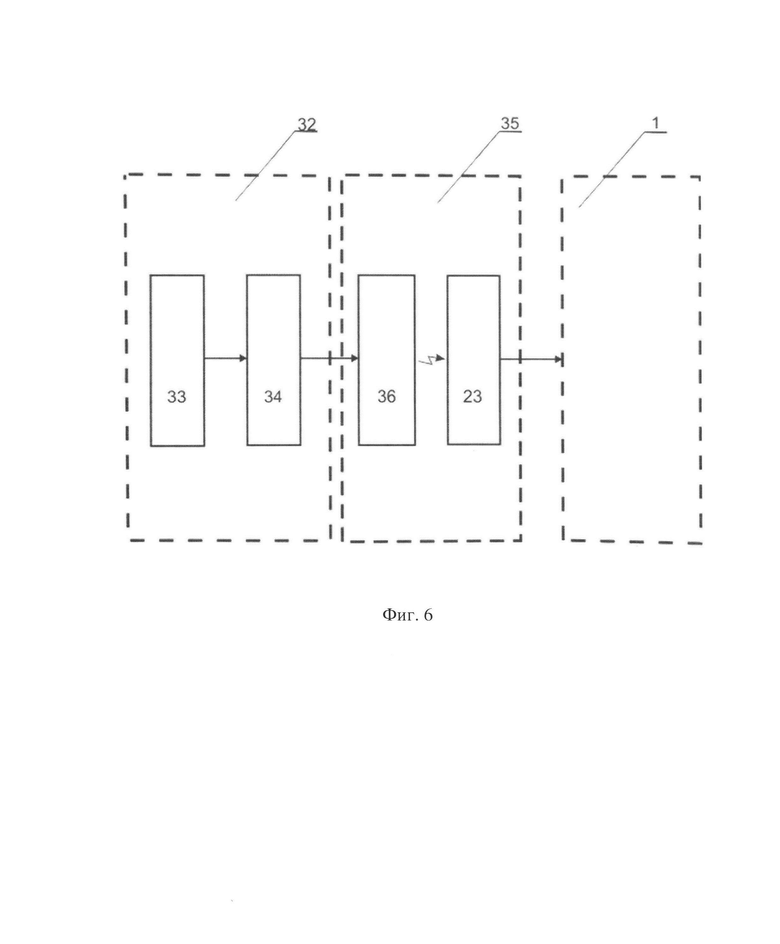
На фиг. 6 приведена принципиальная структурная схема автономной системы управления имитатором ДП подвижного наземного военного объекта, где:
1 - баннер с сетчатой электропроводящей основой; 23 - основной блок управления; 32 - пульт автономной системы управления имитатором демаскирующих признаков подвижного наземного военного объекта; 33 - приемные датчики обнаружения внешнего облучения; 34 - устройство принятия решения и выработки команд; 35 - радиолиния управления; 36 - командно-передающее устройство.
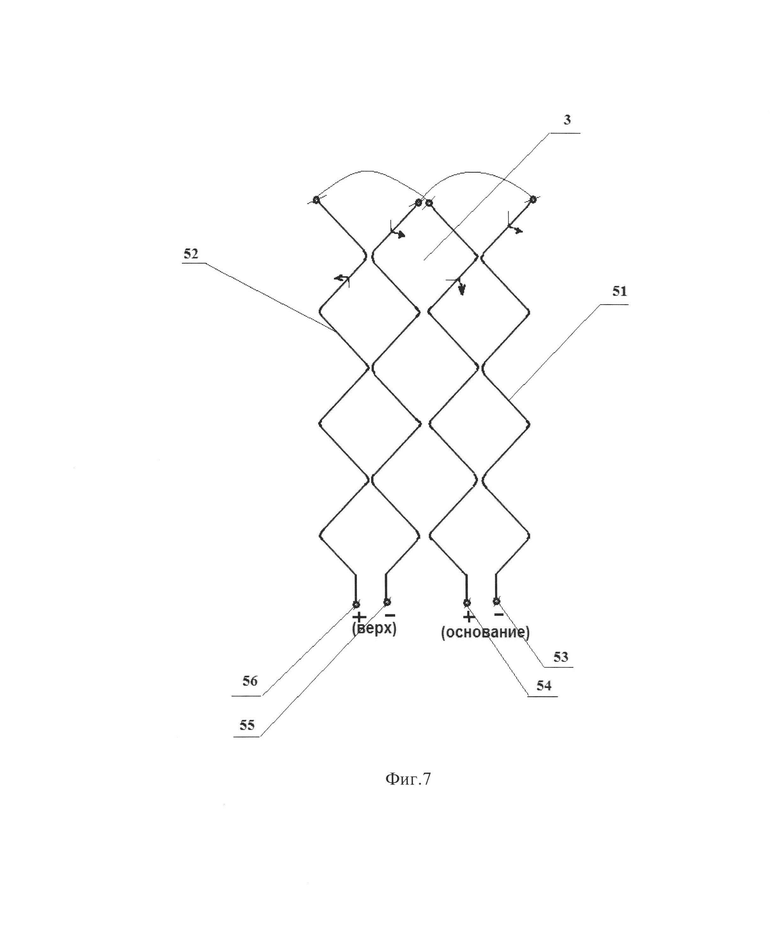
На фиг. 7 приведена принципиальная конструктивная схема технического решения проводника с деформацией кручения по продольной оси излучателя знакопеременных электрических импульсов, где:
3 - излучатель знакопеременных электрических импульсов; 51 - проводник с левосторонней деформацией кручения по продольной оси (стрелкой со значком «минус» показана левосторонняя деформация кручения проводника); 52 - проводник с правосторонней деформацией кручения по продольной оси (стрелкой со значком «плюс» показана правосторонняя деформация кручения проводника); 53 - основание проводника с левосторонней деформацией кручения; 54 - основание проводника с правосторонней деформацией кручения; 55 - вершина проводника с левосторонней деформацией кручения; 56 - вершина проводника с правосторонней деформацией кручения.
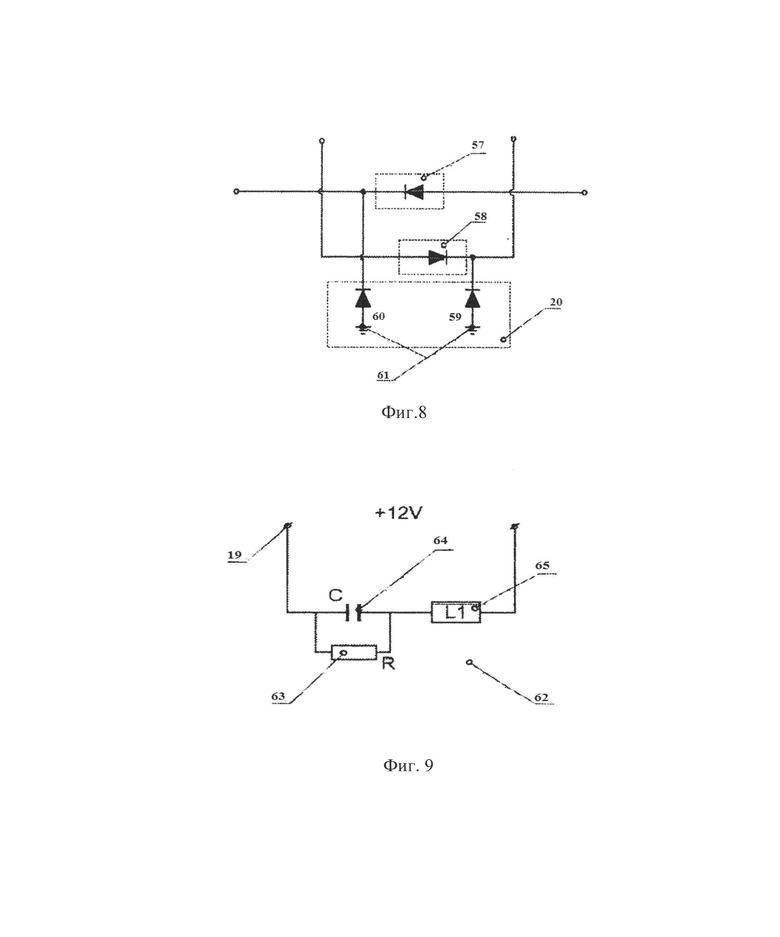
На фиг. 8, 9 приведена принципиальная электрическая схема технического решения генератора знакопеременных электрических импульсов управляющих сигналов, где:
20 - генератор знакопеременных электрических импульсов управляющих сигналов; 57 - нелинейный элемент, 58 - нелинейный элемент; 59 - ограничительный диод; 60 - ограничительный диод; 61 - корпус генератора (заземление); 62 - контур генератора знакопеременных электрических импульсов управляющих сигналов; 63 - резистор R; 64 - конденсатор С; 65 - индуктивность L1.
В функциональное рабочее положение имитатор ДП подвижных наземных военных объектов приводится следующим образом.
Силами экипажа (расчета) подвижного наземного военного объекта на ровном участке поверхностного слоя земли на безопасном удалении (на заданном расстоянии радиуса отклонения боеприпаса Rоткл.б от стационарно расположенного на местности замаскированного подвижного наземного военного объекта на установленном удалении друг от друга (равном длине первого модуля имитатора ДП подвижного наземного военного объекта) размещаются и фиксируются в исходном положении анкерами (18) через монтажные отверстия (9) к грунту второй и третий модули имитатора ДП подвижного наземного военного объекта. При этом первый модуль имитатора ДП подвижного наземного военного объекта находится в свернутом вокруг вала третьего модуля (16) положении. Затем приемные концы тросов (6) запасовываются и закрепляются на шкивы для намотки приемного конца троса (13) вала второго модуля (12). При чем длина свободных приемных концов тросов позволяет первому модулю находиться в исходном положении.
Перевод первого модуля имитатора ДП подвижного наземного военного объекта из исходного положения в рабочее осуществляется под управлением автономной системы управления имитатором ДП подвижного наземного военного объекта, определяющей момент времени перевода. При этом намотка приемных концов двух тросов (6) на оба шкива для намотки приемного конца троса 13 вала второго модуля (12) до срабатывания конечного выключателя (25) производится за счет передачи крутящего момента от электродвигателя второго модуля со шкивом (22) на вал второго модуля (12) посредством клиноременной передачи (17) через шкив клиноременной передачи (14).
Описание принципа работоспособности заявляемого изобретения с получением сформулированного технического результата
Как известно, в системах наведения ВТО реализованы следующие технические решения, позволяющие определять взаимное положение боеприпаса и цели:
подсвет цели специфическим излучением, позволяющим боеприпасу опознать цель и скорректировать траекторию своего движения;
использование излучения цели в различных диапазонах спектра длин ЭМВ;
умение системы наведения идентифицировать оптическую или радиотехническую картину цели по величине наибольшего отраженного сигнала для выбора приоритетного объекта при наведении боеприпаса.
Принцип работы имитатора ДП подвижного наземного военного объекта заключается в повышении эффективности противодействия системам наведения ВТО на подвижный наземный военный объект в районе его расположения, за счет воспроизведения в районе расположения замаскированного действительного подвижного наземного военного объекта его ДП в видимом, ИК и РЛ диапазонах спектра длин ЭМВ и сейсмических волн в приповерхностном слое земли, идентичных признакам функционирующего подвижного наземного военного объекта, обеспечивающих отвод управляемых боеприпасов ВТО с подвижного наземного военного объекта на ложную цель после перевода имитатора ДП подвижного наземного военного объекта из транспортного положения в рабочее.
Отвод боеприпаса ВТО на последнем участке его траектории движения от подвижного наземного военного объекта в заявляемом изобретении осуществляется следующим образом: приемные датчики обнаружения внешнего облучения 33 фиксируют облучение передающими устройствами системы наведения высокоточного боеприпаса и передают соответствующие данные на устройство принятия решения и выработки команд (34). Устройство принятия решения и выработки команд (34) алгоритмически определяет пороговые значения, при достижении которых принимается решение для подачи управляющей команды посредством радиолинии управления (35) через командно-передающее устройство (36) на основной блок управления (23), который, в свою очередь, передает команду на подачу электроснабжения на электродвигатель второго модуля со шкивом (22), приводя его в действие, обеспечивая вращение вала второго модуля (12) и намотку приемных концов двух тросов (6) на оба шкива для намотки приемного конца троса (13) до срабатывания конечного выключателя (25), тем самым приводя первый модуль имитатора в рабочее положение. Одновременно с этим осуществляется передача команд на подачу электроснабжения на пленочный термонагреватель (2) и генератор знакопеременных электрических импульсов управляющих сигналов (20) и на воспроизведение электромагнитным источником сейсмических волн в приповерхностном слое земли сейсмических волн, идентичных сейсмическим волнам функционирующего на месте подвижного наземного военного объекта, тем самым обеспечивая появление в поле зрения системы наведения ВТО двух целей - замаскированного подвижного наземного военного объекта и ложной цели, воспроизводящей ДП подвижного наземного военного объекта в видимом, ИК, РЛ диапазонах спектра длин ЭМВ и сейсмические волны в приповерхностном слое земли, идентичные сейсмическим волнам функционирующего на месте подвижного наземного военного объекта.
При этом командно-передающее устройство 36 также взаимоувязано, по проводной или беспроводной связи, например, с термодымовой системой постановки дымовых завес подвижного наземного военного объекта, тем самым достигается скрытие подвижного наземного военного объекта и отвод боеприпаса ВТО на ложную цель.
Перевод первого модуля имитатора ДП подвижного наземного военного объекта из рабочего положения в исходное производится также по команде устройства принятия решения и выработки команд посредством радиолинии управления (35) через командно-передающее устройство (36) на основной блок управления (23), который, в свою очередь, подает команду на блок управления электродвигателем третьего модуля с автономным источником питания (27) на подачу электроснабжения на электродвигатель третьего модуля со шкивом (28), приводя его в действие, обеспечивая вращение вала третьего модуля (16) и возврат первого модуля в транспортное положение путем намотки баннера с сетчатой электропроводящей основой на вал третьего модуля (16).
Электроснабжение имитатора ДП подвижного наземного военного объекта может осуществляться как от автономного источника питания (19), так и от дизельного/бензинового генератора или бортовой сети подвижного наземного военного объекта (на фигурах не показаны).
Воспроизведение сейсмических волн при высоком коэффициенте передачи, генерируемой электромагнитным источником сейсмических волн механической энергии в энергию механического воздействия, на грунт, излучая имитирующие сейсмические волны, идентичные сейсмическим волнам функционирующей на месте подвижной наземной военной техники осуществляется следующим образом.
Первоначально в режиме предустановки при подаче в обмотку возбуждения (40) одиночных импульсов тока от схемы электропитания (см.Фиг. 5) в электромагните создается проходящий через первый зазор (49) магнитный поток и между якорем (45) и индуктором (39) возникает электромагнитная сила, которая воздействуя на якорь (45) и индуктор (39) и далее через опорную плиту (37) на стальную трубу (46) закрепляет ее в глубине от поверхности грунта, так что опорная плита (37) плотно прижимается к поверхности грунта. Таким образом, обеспечивая передачу механической энергии от опорной плиты (37) в поверхность грунта с минимальными потерями.
При повторной подаче в обмотку возбуждения (40) импульса тока от схемы электропитания (см.Фиг.5) в электромагните создается проходящий через первый зазор (49) магнитный поток и между якорем (45) и индуктором электромагнита (39) возникает электромагнитная сила, под действием которой якорь (45) и индуктор электромагнита (39) начинают двигаться навстречу друг другу. Перемещаясь, якорь (45) воздействует на упруго-эластичный элемент (43), сжимая его в сторону уменьшения второго зазора (50). Якорь (45) разгоняется. Далее якорь (45) тормозится, и приобретенная им на интервале разгона кинетическая энергия переходит в потенциальную энергию сжатого упруго-эластичного элемента (43). Якорь (45), сжимая упруго-эластичный элемент (43), одновременно воздействует через него на стальные стойки (41) и опорную плиту (37), в результате чего опорная плита (37) начинает перемещаться с изменяющейся скоростью, формируя в грунте волну упругих деформаций с вертикальной поляризацией. Индуктор (39) с пригрузом (38) движутся навстречу якорю (45), а так как масса якоря (45) существенно меньше массы индуктора (39) соединенного с пригрузом (38), то якорь (45) под действием развиваемой приводом электромагнитной силы сжимает упруго - эластичный элемент (43) и к моменту ударного взаимодействия с индуктором выбирает большую часть первого зазора (49). После ударного взаимодействия якорь (45) и индуктор (39) с пригрузом (38) движутся как единое целое, а упруго - эластичный элемент (43), разжимаясь, передает свою потенциальную энергию в кинетическую энергию совместного движения якоря (45) и пригруза (38), и опорной плиты (37). Кроме того, механическая энергия от опорной плиты (37) передается в посаженный в грунт отрезок стальной трубы (46), которая в таком случае является дополнительным излучателем сейсмической волны. Таким образом формируется волна упругих деформаций SH - типа, фронт которой переходит в продольную волну R - типа, формируя поверхностную волну с вертикальной поляризацией, тем самым повышая эффективность сейсмоисточника.
Для конденсации водяных паров на внутренней и внешней поверхностях перфорированного полимерного покрытия (4), за счет ионизации воздушной среды в приповерхностном слое с внутренней и внешней сторон поверхности перфорированного полимерного покрытия (4) с образованием заряженных кластеров сконденсированных паров воды, генератор знакопеременных электрических импульсов управляющих сигналов (20) с подключенным к нему излучателем знакопеременных электрических импульсов (3) функционирует следующим образом.
При включении генератора знакопеременных электрических импульсов управляющих сигналов (20) создается определенный опорный сигнал, который подается на проводники с левосторонней (51) и правосторонней (52) деформацией кручения по продольной оси (стрелками со значками «минус» и «плюс» на фиг. 7 показана левосторонняя и правосторонняя деформация кручения проводников). Каждый проводник создает сконцентрированное поляризованное излучение, которое направлено от вершины проводника с левосторонней и правосторонней деформацией кручения (55), (56)к основанию проводника с левосторонней и правосторонней деформацией кручения (53), (54), распространяясь в приповерхностном слое с внутренней и внешней сторон поверхности перфорированного полимерного покрытия (4) с образованием заряженных кластеров сконденсированных паров воды, за счет ионизации примыкающей к покрытию (4) воздушной среды.
Поскольку основания (53), (54) и вершины (55), (56)соединены через нелинейные элементы (57), (58) (см. фиг. 8), то эти элементы способствуют одновременному излучению от каждого проводника (51), (52) (см. фиг. 7) слабого электрического поля в противофазе. Параметры воздействия зависят от уровня опорного сигнала, формируемого генератором знакопеременных электрических импульсов управляющих сигналов (20) (в зависимости от типа использованных диодов) (59), уровня мощности источника (60) (см. фиг. 8), уровеня мощности автономного источника питания (19), параметров контура генератора (62), которые, в свою очередь, зависят от номинальных значений резистора R (63), конденсатора С (64), и индуктивности L 1 (65) (см. фиг. 9) [7].
Оценка эффективности применения заявляемого имитатора ДП подвижных наземных военных объектов производилась путем имитационного моделирования по разработанным ранее методикам [3, 8] и по результатам полевых испытаний [4].
Оценка эффективности применения заявляемого имитатора ДП подвижного наземного военного объекта в РЛ диапазоне спектра длин ЭМВ производилась путем имитационного моделирования по известной методике [8, 9] при следующих допущениях:
в качестве подвижного наземного военного объекта принята боевая машина пехоты БМП-3, замаскированная табельными средствами маскировки;
ширина диаграммы направленности - 25 град;
расчетное ВТО - ПТУР AGM-114L «Longbow Hellfire» с активной радиолокационной головкой самонаведения (АРЛГСН);
подстилающий фон - «зеленый луг» с удельной эффективной площадью рассеяния (ЭПР) фона σф=0,003 м2;
отношение ЭПР создаваемой ложной цели к ЭПР имитируемого подвижного наземного военного объекта 
вероятность обнаружения подвижного наземного военного объекта Робн=0,99;
вероятность поражения цели одним боеприпасом Рn=0,99.
Для оценки эффективности моделируемого варианта применения имитатора демаскирующих признаков подвижного наземного военного объекта использовались следующие расчетные зависимости:
а) самонаведение ВТО на цель на конечном участке определяется следующими вероятностными процессами:
вероятностью захвата истинной цели 
вероятностью захвата ложной цели 
б) вероятность наведения ВТО с АРЛГСН на цель определялась по формуле

Чтобы исключить возможность занижения тактико-технических характеристик ВТО принято допущение, что цель будет обнаруживаться и захватываться АРЛГСН с вероятностью близкой к 
Вероятность управления  обусловленная прежде всего показателями надежности узлов и агрегатов механизма управления и наведения ВТО, также считаем близкой к 1,0.
обусловленная прежде всего показателями надежности узлов и агрегатов механизма управления и наведения ВТО, также считаем близкой к 1,0.
Следовательно, вероятность наведения ВТО с АРЛГСН при применении заявляемого имитатора демаскирующих признаков подвижного наземного военного объекта в большей степени будет определяться вероятностью повторного захвата цели (реального объекта) на сопровождение

Вероятность захвата цели ГСН определяется отношением мощности сигнала от цели к мощности сигнала от фона по зависимости
где qc - отношение мощностей сигнал/фон; Рлт - уровень ложной тревоги.
Для боеприпасов с АРЛГСН отношение сигнал/шум на входе приемника определяется по формуле
где σоб - ЭПР объекта, м2;  удельная ЭПР фона; Н - высота полета ВТО, м; θ - ширина направленности антенны РЛС АРЛГСН, рад.
удельная ЭПР фона; Н - высота полета ВТО, м; θ - ширина направленности антенны РЛС АРЛГСН, рад.
Отсюда следует, что вероятность наведения боеприпаса с АРЛГСН на подвижный наземный военный объект рассчитывается по формуле

а вероятность наведения на универсальный имитатор подвижного наземного военного объекта - по формуле

где σпп - ЭПР универсального имитатора подвижного наземного военного объекта.
Полная группа событий при захвате цели на сопровождение с учетом приведенных зависимостей (3) и (4) определяется выражением

Если создается несколько ложных целей, то полная группа событий, с учетом приведенной зависимости (5) определяется как

где Nл - число создаваемых ложных целей, при условии, что их энергетические характеристики, определяемые ЭПР, будут идентичными.
Очевидно, что соотношения (5) и (6) при расчете  по формулам (5) и (6) чаще всего выполняться не будут, поэтому необходим ввод нормировочного коэффициента kнорм
по формулам (5) и (6) чаще всего выполняться не будут, поэтому необходим ввод нормировочного коэффициента kнорм

Исходя из условия  Окончательный вид формулы для расчета вероятности наведения ВТО с АРЛГСН на цель при применении Nл числа ложных целей примет вид
Окончательный вид формулы для расчета вероятности наведения ВТО с АРЛГСН на цель при применении Nл числа ложных целей примет вид

Результаты моделирования показали, что применение заявляемого имитатора демаскирующих признаков подвижного наземного военного объекта при выполнении условия, что отношение ЭПР создаваемой ложной цели к ЭПР маскируемого подвижного наземного военного объекта  позволит снизить вероятность наведения
позволит снизить вероятность наведения  с 0,8 до 0,16, что в значительной мере обеспечивает противодействие ВТО с РЛ системами наведения, за счет применения внезапно появляющихся ложных целей в зоне наведения ВТО на замаскированный подвижный наземный военный объект, имитирующих ДП подвижного наземного военного объекта в РЛ диапазонах спектра длин ЭМВ.
с 0,8 до 0,16, что в значительной мере обеспечивает противодействие ВТО с РЛ системами наведения, за счет применения внезапно появляющихся ложных целей в зоне наведения ВТО на замаскированный подвижный наземный военный объект, имитирующих ДП подвижного наземного военного объекта в РЛ диапазонах спектра длин ЭМВ.
Эффективность заявляемого изобретения в ИК диапазоне спектра длин ЭМВ оценивалась по результатам имитационного моделирования проявления имитатором демаскирующих признаков подвижного наземного военного объекта ДП подвижного наземного военного объекта в ИК диапазоне спектра длин ЭМВ [9].
На основе проведенного имитационного моделирования было установлено, что требуемые значения физических параметров спектральных характеристик моделируемых вариантов технических средств маскировки подвижного наземного военного объекта функционально обусловливаются прежде всего требуемыми значениями вероятности его обнаружения Робн(t) при разовом контакте средств разведки с подвижным наземным военным объектом в ИК диапазоне спектра длин ЭМВ, ведущих разведку на малых (до 1000 м), средних (до 5000 м), больших (до 10000 м) высотах и космическую разведку.
Известно, что для того, чтобы подвижный наземный военный объект своевременно выполнил поставленную задачу, его живучесть должна быть Q(t)≥0,7, которая определяется в первом приближении по известной формуле

где Р обн.i (t) - вероятность обнаружения подвижного наземного военного объекта средствами разведки;
Рн - вероятность наведения оптико-электронных и радиолокационных систем наведения ВТО на подвижный наземный военный объект в составе группового наземного военного объекта;
Рпор - вероятность поражения подвижного наземного военного объекта

где  - вероятность поражения подвижного наземного военного объекта в составе группового объекта (без создания ложного одиночного подвижного наземного военного объекта в районе расположения действительного подвижного наземного военного объекта);
- вероятность поражения подвижного наземного военного объекта в составе группового объекта (без создания ложного одиночного подвижного наземного военного объекта в районе расположения действительного подвижного наземного военного объекта);
 - то же, с созданием ложного одиночного подвижного наземного военного объекта в районе расположения действительного подвижного наземного военного объекта;
- то же, с созданием ложного одиночного подвижного наземного военного объекта в районе расположения действительного подвижного наземного военного объекта;
 - вероятность обнаружения i-ого одиночного подвижного наземного военного объекта в составе группового объекта
- вероятность обнаружения i-ого одиночного подвижного наземного военного объекта в составе группового объекта

где С - коэффициент, учитывающий влияние на качество дешифрирования положения и количества одиночных объектов (подвижного наземного военного объекта при наличии ложного подвижного наземного военного объекта);
В - коэффициент распознавания форм одиночного подвижного наземного военного объекта, м;
 - натуральный размер одиночного подвижного наземного военного объекта;
- натуральный размер одиночного подвижного наземного военного объекта;
 - разрешающая способность изображения подвижного наземного военного объекта;
- разрешающая способность изображения подвижного наземного военного объекта;
m - масштаб изображения подвижного наземного военного объекта;
К - контраст изображения подвижного наземного военного объекта относительно подстилающего фона местности.
При заданной вероятности поражения Рпор=0,8 для обеспечения требуемой живучести одиночного подвижного наземного военного объекта Q(t), необходимо, чтобы вероятность его обнаружения была Робн(t) ≤ 0,37.
Известно [10], что для ИК диапазона спектра длин ЭМВ моделируемой адаптивно-изменяемой величиной являются температурный контраст подвижного наземного военного объекта относительно подстилающего фона местности.
Для определения вероятность обнаружения  замаскированного подвижного наземного военного объекта с применением технических средств скрытия в ИК диапазоне спектра длин ЭМВ на практике чаще используют температурный контраст (Кик) поверхностей объекта и фона, взятый по модулю, обеспечивается путем снижения температуры покрытия до необходимого уровня, который можно рассчитать по формуле [1, 10]
замаскированного подвижного наземного военного объекта с применением технических средств скрытия в ИК диапазоне спектра длин ЭМВ на практике чаще используют температурный контраст (Кик) поверхностей объекта и фона, взятый по модулю, обеспечивается путем снижения температуры покрытия до необходимого уровня, который можно рассчитать по формуле [1, 10]

где Тоб, Тф - радиационная температура подвижного наземного военного объекта и фона соответственно в градусах Цельсия или Кельвина.
Радиационная температура связана с термодинамической следующим соотношением

где εр - коэффициент излучения (или коэффициент серости) материала (поверхности).
Тогда формула (12) примет вид:

где Тоб и Тф - термодинамические температуры подвижного наземного военного объекта и фона соответственно в градусах Кельвина.
Эффективность применения моделируемых вариантов технических средств имитации подвижного наземного военного объекта определяется возможностью его обнаружения в период функционирования в соответствующем диапазоне спектра длин ЭМВ.
В свою очередь, вероятность поражения (Рпор) подвижного наземного военного объекта в составе группового объекта определяется как вероятность попадания нормально распределенной случайной величины х в заданный интервал (а, b), при известных значениях М и σ [11]

где 
 - математическое ожидание дискретной случайной величины точки прицеливания от истиной цели поражения;
- математическое ожидание дискретной случайной величины точки прицеливания от истиной цели поражения;
Li - значение случайной величины отклонения указанной величины оператором-дешифровщиком;
σ - среднее квадратичное отклонение точки прицеливания средства поражения от истинного подвижного наземного военного объекта в составе группового объекта.
По результатам проведенного математического моделирования критериальной оценки эффективности скрытия и имитации одиночного подвижного наземного военного объекта с применением заявляемого изобретения было установлено, что при принятых количественных значениях показателей и параметров моделируемых вариантов скрытия действительного подвижного наземного военного объекта с применением исследуемых вариантов технических средств скрытия одиночного подвижного наземного военного объекта и создания в районе его расположения на заданном от него расстоянии ложного подвижного наземного военного объекта, вероятность обнаружения ложного подвижного наземного военного объекта и принятие его за действительный при разовом контакте средства разведки с имитатором демаскирующих признаков подвижного наземного военного объекта составляет  при вероятности наведения средства поражения на имитатор демаскирующих признаков подвижного наземного военного объекта Рн=0,92 и вероятности его поражения Рпор=0,9.
при вероятности наведения средства поражения на имитатор демаскирующих признаков подвижного наземного военного объекта Рн=0,92 и вероятности его поражения Рпор=0,9.
В этих условиях, с учетом приведенной зависимости (9) живучесть (Q) ложного подвижного наземного военного объекта, в виде оборудованного на заданном расстоянии от скрываемого подвижного наземного военного объекта имитатора демаскирующих признаков подвижного наземного военного объекта, составляет Q=0,34, что подтверждает целесообразность практической реализации заявляемого изобретения.
В то же время, вероятность обнаружения замаскированного подвижного наземного военного объекта при разовом контакте средства разведки с имитатором демаскирующих признаков подвижного наземного военного объекта составляет Роi=0,32 при вероятности наведения средства поражения на подвижный наземный военный объект Рn=0,35 и вероятности его поражения с учетом расположения на заданном расстоянии имитатора демаскирующих признаков подвижного наземного военного объекта Рп.д/л=0,3.
В этих условиях, с учетом приведенной зависимости (9) живучесть действительного подвижного наземного военного объекта, замаскированного с применением эффективного моделируемого варианта технических средств скрытия в видимом, ИК и РЛ диапазонах спектра длин ЭМВ, с одновременным расположением в районе скрываемого подвижного наземного военного объекта ложного подвижного наземного военного объекта в виде имитатора демаскирующих признаков подвижного наземного военного объекта, составляет Q=0,97, что обеспечивает выполнение подвижным наземным военным объектом поставленной задачи.
Эффективность электромагнитного источника сейсмических волн в составе заявляемого изобретения «Имитатор демаскирующих признаков подвижного наземного военного объекта» оценивалась по результатам полевых экспериментальных исследований, которые показали положительный эффект его применения в составе заявляемого имитатора демаскирующих признаков подвижного наземного военного объекта, с целью противодействия сейсмическим средствам разведки и наведения ВТО, в частности РСА [4].
Целью экспериментальных исследований являлась оценка эффективности применения электромагнитного источника сейсмических волн, обеспечивающего достижение технического результата, заключающегося в воспроизведении сейсмических волн при высоком коэффициенте передачи, генерируемой механической энергии в энергию механического воздействия, на грунт, излучая имитирующие сейсмические волны подобные излучению подвижного наземного военного объекта, для имитации функционирующего подвижного наземного военного объекта от сейсмических средств наземной разведки, в частности от РСА, и систем наведения ВТО.
Полученные результаты экспериментальных исследований подтвердили достижение технического результата, заключающегося в воспроизведении сейсмических волн при высоком коэффициенте передачи генерируемой электромагнитным источником сейсмических волн механической энергии в энергию механического воздействия на грунт, имитирующих сейсмические волны, идентичные сейсмическим волнам функционирующего на месте подвижного наземного военного объекта.
Применяемый в составе заявляемого изобретения электромагнитный источник сейсмических волн способен обеспечивать воспроизведение низкочастотных (до 100 Гц) и высокочастотных (до 1000 Гц) составляющих сейсмического поля, функционирующего на месте подвижного наземного военного объекта.
Полученный маскировочный эффект по обеспечению имитации подвижного наземного военного объекта с применением заявляемого изобретения «Имитатор демаскирующих признаков подвижного наземного военного объекта» в условиях применения РСА и современных средств разведки с оптико-электронными и радиолокационными системами наведения ВТО на поражаемую цель достигается за счет комплексного проявления демаскирующих признаков одновременного в видимом, ИК, РЛ диапазонах спектра длин ЭМВ и сейсмических волн в поверхностном слое земли, идентичных сейсмическим волнам функционирующего на месте подвижного наземного военного объекта, во время его практической эксплуатации:
во-первых, для проявления имитируемых видовых ДП подвижного наземного военного объекта в видимом диапазоне спектра длин ЭМВ на внешнюю поверхность перфорированного полимерного покрытия (4) баннера с сетчатой электропроводящей основой (1), окрашенного в цвет подстилающей поверхности для растительных либо пустынно-степных фонов, нанесено цветное 3D-изображение горизонтального силуэта имитируемого незамаскированного подвижного наземного военного объекта (5) в масштабе 1:1 с применением защитного маскировочного окрашивания под цвет и структуру естественного травяного покрова окружающего фона местности при обеспечении светостабилизации спектральных коэффициентов яркости (СКЯ) маскировочных красителей или пигментов со спектральным коэффициентом яркости rоб=0,45 применяемых красителей для защитного окрашивания незамаскированного подвижного наземного военного объекта на подстилающем фоне зеленого луга с его СКЯ rф=0,18, за счет введенного в их состав 5% водного состава гидрозоля катионов серебра с концентрацией серебра 12 мг/л водной дисперсии [12, 13];
во-вторых, проявление имитирующих видовых ДП и признаков деятельности подвижного наземного военного объекта в ИК диапазоне спектра длин ЭМВ осуществляется автоматически переводящимся из транспортного положения в рабочее первым модулем установленного на поверхности грунта имитатора демаскирующих признаков подвижного наземного военного объекта за счет нагрева пленочного термонагревателя (2) с регулируемой от 40°С до 60°С температурой, имитирующий прогрев участка поверхности подвижного наземного военного объекта, например, от функционирующего двигателя, и дополнительной конденсации водяных паров из окружающей воздушной среды на внутренней и внешней поверхностях перфорированного полимерного покрытия (4) при ионизации среды размещенными поверх сторон сетчатой электропроводящей основы баннера излучателями знакопеременных электрических импульсов (3) путем образования с обеих сторон плоских поверхностей перфорированного полимерного покрытия (4) сильно поляризованного электрического поля с напряженностью Ев=2,5×107 В/м [7], вызывающего кластерирование водяных паров в обеих приповерхностных средах плоских поверхностей перфорированного полимерного покрытия (4) с образованием на них устойчивого во времени парникового эффекта с перепадом температур между подстилающим растительным фоном местности и внутренней поверхностью перфорированного полимерного покрытия (4) с образованием в приповерхностном слое радиационного прогрева грунта с перепадом температур по отношению к подстилающему фону местности как минимум на ±3,0-5,0°;
в-третьих, проявление имитирующих видовых ДП подвижного наземного военного объекта в РЛ диапазоне спектра длин ЭМВ, осуществляется за счет переотражения излучения радиолокационного средства обнаружения подвижного наземного военного объекта в сторону линии визирования «средство разведки и системы наведения ВТО - имитатор ложной цели» автоматически переводящимся из транспортного положения в рабочее первым модулем установленного на поверхности грунта имитатора демаскирующих признаков подвижного наземного военного объекта, выполненного в виде баннера с сетчатой электропроводящей основой (1) с геометрическим размером ячеи 2,0×2,0 мм, отражающей 50% электромагнитного излучения по мощности с удельным поверхностным сопротивлением W=75,0 Ом относительно эталона металлической пластины; в-четвертых, проявление имитирующих видовых ДП и признаков деятельности подвижного наземного военного объекта во время его практической эксплуатации, таких как сейсмические волны в поверхностном слое земли, идентичных сейсмическим волнам функционирующего на месте подвижного наземного военного объекта, осуществляется за счет воспроизведения сейсмических волн при высоком коэффициенте передачи генерируемой электромагнитным источником сейсмических волн (21) механической энергии в энергию механического воздействия на грунт, имитирующих сейсмические волны, идентичные сейсмическим волнам функционирующего на месте подвижного наземного военного объекта.
Таким образом, заявляемое изобретение «Имитатор демаскирующих признаков подвижного наземного военного объекта» обеспечивает выполнение сформулированной задачи, заключающейся в повышении эффективности противодействия системам наведения ВТО на подвижный наземный военный объект в районе его расположения при применении автономного имитатора ДП подвижных наземных военных объектов, за счет достоверного перенацеливания боеприпаса ВТО на последнем участке его траектории движения с действительной цели поражения на внезапно создаваемую ложную цель, имитирующую видовые ДП и признаки деятельности в видимом, ИК, РЛ диапазонах спектра длин ЭМВ, а также сейсмические волны, идентичные сейсмическим волнам функционирующего на местности подвижного наземного военного объекта.
Список использованных источников
1. Кривилев В.А. и др. Маскировка войск и войсковых объектов: Учебник. - М: ВИА, 1996, стр. 253.
2. Наставление по военно-инженерному делу для вооруженных сил РФ. - М.: 2016 г., с. 104…107.
3. Автономный имитатор демаскирующих признаков наземных объектов для внезапного изменения целевой обстановки в целях противодействия ВТО / Д.Ю. Щетинин, А.А. Баранов, В.П. Герасименя. -Патент на полезную модель РФ №193373. - 2019.
4. Электромагнитный источник сейсмических волн / В.П. Герасименя, Р.А. Блашенцев, П.Н. Осипов, А.С. Карпов / - Патент на полезную модель РФ №213343. - 2022.
5. Комплект боеприпасов-кассет для управляемого внезапного резкоконтрастного распятнения или аэрозольного образования в зоне расположения маскируемого объекта / В.П. Герасименя, А.А.Баранов, Н.М. Комаровский, В.И. Селезнев - Патент на полезную модель РФ №175624. - 2016.
6. Радиолокационный имитатор ложной цели / Л.Г. Устименко, Д.Н. Владимиров, В.П. Герасименя, Н.Н. Костюнин, Л.М. Суслов, Е.Н. Хандогина - Патент на полезную модель РФ №81571 - 2008.
7. Способ коррекции функционального состояния биологического объекта и устройство для его осуществления / Герасименя В.П., Соболев Л.А., Гулин А.Н., Гумаргалиева 3., Соловьев А.Г., Анисимов Д.Г.
8. Автономный имитатор демаскирующих признаков наземных военных обьектов / В.П. Герасименя, A.M. Беляев, Е.И. Попов, М.В. Щедловская, П.Н. Осипов / - Патент RU на полезную модель.
9. Герасименя В.П., Баранов А.А. Имитационная модель оценки эффективности применения технических средств маскировки типовых одиночных и групповых однородных наземных объектов от оптико-электронных и радиолокационных средств разведки. Свидетельство о государственной регистрации программы для ЭВМ №2021619042 от 03.06.2021.
10. Меньшаков Ю.К. Основы защиты от технических разведок: учебное пособие / Ю.К. Меньшаков; под общ. ред. М.П. Сычева. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2014.
11. Вентцель Е.С. Теория вероятностей. - М.: Гос.изд. физ.-мат.литры, 1962. - 564 с.
12. Маскировка. Часть 1. Основа и техника маскировки. Учебник B.А. Ефимов, В.Е. Кольчевский, С.Г. Чермашенцев. - М.: ВИА, 1971. - С. 189-216, Глава IX. Маскировочное окрашивание.
13. Способ получения окрашенных текстильных материалов, обработанных гидрозолем катионов серебра, с комплексом светостабилизирующих, антимикробных и антитоксических свойств / В.П. Герасименя, М.А. Клыков, С.В. Захаров, А.А. Слепнев, А.Н. Кутавин, C.С. Вавилова - Патент RU на изобретение 2640925 - 2016 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ИМИТАТОР ПОДВИЖНОГО НАЗЕМНОГО ВОЕННОГО ОБЪЕКТА | 2023 |
|
RU2805098C1 |
| Имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО | 2022 |
|
RU2799747C1 |
| Индивидуальный комплект многоспектральных технических средств маскировки подвижных военных объектов с адаптивной системой управления физическими параметрами | 2022 |
|
RU2791934C1 |
| Боеприпас-кассета для управляемого внезапного создания маски-помехи в зоне расположения маскируемого объекта | 2018 |
|
RU2702538C1 |
| ЛОЖНОЕ СООРУЖЕНИЕ ДЛЯ ИМИТАЦИИ ШТАБЕЛЯ ИНЖЕНЕРНЫХ БОЕПРИПАСОВ С ИМИТАЦИЕЙ ДЕМАСКИРУЮЩИХ ПРИЗНАКОВ И ПРИЗНАКОВ ЕГО ПОРАЖЕНИЯ | 2024 |
|
RU2833010C1 |
| Самоходный макет военной техники | 2022 |
|
RU2794932C1 |
| Имитатор света фар движущейся по мостовой переправе техники | 2024 |
|
RU2835067C1 |
| СИСТЕМА ПОСТАНОВКИ ПОМЕХ НАЗЕМНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКЕ ПО ПЕРИМЕТРУ ФУНКЦИОНИРУЮЩЕГО ВОЕННОГО ОБЪЕКТА И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2769085C1 |
| МАСКИРОВОЧНОЕ УСТРОЙСТВО | 2015 |
|
RU2594475C1 |
| СПОСОБ ЗАЩИТЫ ПОДВИЖНЫХ ТЕХНИЧЕСКИХ ОБЪЕКТОВ ОТ АВТОМАТИЧЕСКИХ НЕКОНТАКТНЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2018 |
|
RU2697932C1 |
Заявляемое изобретение относится к области маскировки. Автономный имитатор ДП подвижных наземных военных объектов в районе расположения замаскированных действительных подвижных наземных военных объектов, установленный на поверхности грунта, состоит из находящихся в функционально-конструктивном единстве четырех модулей, которые выполнены с возможностью управления приемно-передающими и исполнительными функциями автономного имитатора ДП подвижных наземных военных объектов. Система обеспечивает обнаружение функционирующего на местности ложного подвижного наземного военного объекта средствами разведки и наведения ВТО и определение момента времени начала имитации им ДП подвижного наземного военного объекта для перенацеливания боеприпаса ВТО на последнем участке его траектории движения с действительной цели поражения на внезапно создаваемую ложную цель, имитирующую видовые ДП и признаки деятельности в видимом, ИК РЛ диапазонах спектра длин ЭМВ, а также сейсмические волны, идентичные сейсмическим волнам функционирующего на местности подвижного наземного военного объекта. Достигается повышение эффективности противодействия системам наведения ВТО на подвижный наземный военный объект в районе его расположения. 4 з.п. ф-лы, 9 ил.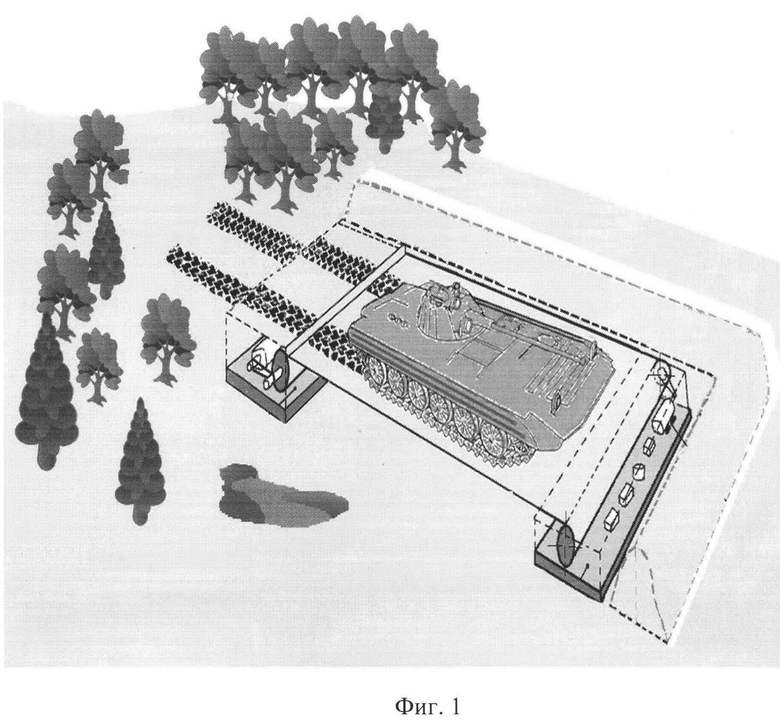
1. Автономный имитатор демаскирующих признаков подвижных наземных военных объектов, содержащий сетчатую основу с закрепленным на ней гибким полимерным покрытием, изготовленным из отражающего электромагнитные волны материала, окрашенного в цвет подстилающей поверхности для растительных либо пустынно-степных фонов, а также монтажные приспособления, обеспечивающие фиксацию гибкого перфорированного полимерного покрытия имитатора ложной цели на поверхности грунта, отличающийся тем, что установленный на поверхности грунта автономный имитатор демаскирующих признаков подвижных наземных военных объектов включает в себя функционально и конструктивно соединенные между собой четыре модуля, которые выполнены с возможностью управления приемно-передающими и исполнительными функциями автономного имитатора, при этом:
первый модуль, выполненный в виде баннера с сетчатой электропроводящей основой с геометрическим размером ячеи 2,0×2,0 мм, по всей длине боковых сторон которого вплетены два троса, удерживающие его в горизонтальном рабочем положении, с одной торцевой стороны которого впрессована направляющая, жестко закрепленная винтами крепежными через хомуты накладные со свободными концами тросов, с внешней поверхности которого впрессован пленочный термонагреватель с регулируемой температурой от 40 до 60°С, имитирующий прогрев участка поверхности наземного военного объекта, например, от функционирующего двигателя, и размещенный поверх сторон сетчатой электропроводящей основы баннера излучатель знакопеременных электрических импульсов, ионизирующих воздушную среду для конденсации водяных паров в приповерхностном слое с внутренней и внешней сторон поверхности перфорированного полимерного покрытия, на внешнюю поверхность которого нанесено цветное 3D-изображение горизонтального силуэта имитируемого незамаскированного подвижного наземного военного объекта в масштабе 1:1;
второй и третий модули выполнены в виде плит из бакелитовой влагостойкой многослойной фанеры с монтажными отверстиями по периметру для анкеров и съемными защитными кожухами с соосно установленными на них (по две на каждую) плоскими опорными стойками с запрессованными в них подшипниками, в которые установлены соответственно вал второго модуля и вал третьего модуля, при этом по одному концу каждого троса жестко закреплены к валу третьего модуля, а на вал второго модуля посажены два шкива для намотки приемного конца троса, одновременно с этим, с одного торца каждого из валов посажен шкив клиноременной передачи для придания вращения от электродвигателя второго модуля со шкивом и электродвигателя третьего модуля со шкивом соответственно валу второго модуля и валу третьего модуля посредством клиноременной передачи для перевода первого модуля из исходного положения в рабочее и обратно, при этом фиксация положения первого модуля в рабочем и исходном положениях обеспечивается конечными выключателями;
четвертый модуль выполнен в виде увязанных между собой единым функционально-конструктивным решением отдельных элементов с исполнительными и управляющими приемно-передающими функциями и включает в себя: автономный источник питания; генератор знакопеременных электрических импульсов; электромагнитный источник сейсмических волн; электродвигатель второго модуля со шкивом и электродвигатель третьего модуля со шкивом, обеспечивающие вращение соответственно вала второго модуля и вала третьего модуля посредством клиноременной передачи; основной блок управления; блок управления электродвигателем третьего модуля с автономным источником питания, которые в совокупности объединены силовыми и сигнальными связями посредством проводных и беспроводных линий управления.
2. Автономный имитатор по п.1, отличающийся тем, что автономная система управления имитатором демаскирующих признаков подвижного наземного военного объекта, определяющая момент времени перевода первого модуля из исходного положения в рабочее и обратно, состоит из пульта автономной системы управления имитатором демаскирующих признаков подвижного наземного военного объекта, включающего приемные датчики обнаружения внешнего облучения подвижного наземного военного объекта передающими устройствами системы наведения высокоточного боеприпаса и устройства принятия решения и выработки команд, и радиолинии управления, включающей в себя командно-передающее устройство и основной блок управления.
3. Автономный имитатор по п.1, отличающийся тем, что для воспроизведения сейсмических волн в поверхностном слое земли, идентичных сейсмическим волнам функционирующего на месте подвижного наземного военного объекта, электромагнитный источник сейсмических волн содержит расположенную на поверхностном слое земли опорную плиту, выполненную из диэлектрического материала, на верхней плоскости опорной плиты по ее центральной оси приварен пригруз, с впрессованным на верхней плоскости пригруза индуктором электромагнита со встроенной в нем обмоткой возбуждения, при этом по обе стороны пригруза к опорной плите прикручены две жесткие стальные стойки с выполненными в верхней торцевой части полыми втулками с установленными в них упруго-эластичными элементами цилиндрической формы, на которые привинчена П-образная стальная балка с высотой П-образного профиля, равной наименьшей стороне опорной плиты, и длиной, равной суммарной высоте пригруза и преобразователя электромагнитного типа, с ввинченным в нижнюю ее часть якорем, а к нижней плоскости опорной плиты перпендикулярно по ее центральной оси резьбовым соединением закреплена стальная труба с соотношением геометрических размеров ее длины к суммарной высоте пригруза и индуктора электромагнита 2:1, при этом конструктивно собранный электромагнитный источник сейсмических волн помещен в съемно-разъемный корпус, закрепленный к боковым плоскостям опорной плиты болтовым соединением, при этом для обеспечения работоспособности электромагнитного источника сейсмических волн встроенная в индукторе электромагнита обмотка возбуждения подсоединена по проводной связи к генератору импульсов тока с дросселем насыщения, конструктивно входящему в состав основного блока управления.
4. Автономный имитатор по п.1, отличающийся тем, что для конденсации водяных паров на внутренней и внешней поверхностях перфорированного полимерного покрытия, за счет ионизации воздушной среды в приповерхностном слое с внутренней и внешней сторон поверхности перфорированного полимерного покрытия с образованием заряженных кластеров сконденсированных паров воды, излучатель знакопеременных электрических импульсов подключен к генератору знакопеременных электрических импульсов управляющих сигналов проводными линиями управления.
5. Автономный имитатор по п.1, отличающийся тем, что для получения устойчивого проявления демаскирующих признаков подвижного наземного военного объекта, в состав маскировочных красителей или пигментов, применяемых для защитного окрашивания перфорированного полимерного покрытия и нанесения на его внешнюю поверхность цветного 3D-изображения горизонтального силуэта имитируемого незамаскированного подвижного наземного военного объекта в масштабе 1:1, введено 5% водного состава гидрозоля катионов серебра с концентрацией серебра 12 мг/л водной дисперсии.
| УНИВЕРСАЛЬНЫЙ ИМИТАТОР ПОДВИЖНОГО НАЗЕМНОГО ВОЕННОГО ОБЪЕКТА | 2023 |
|
RU2805098C1 |
| Имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО | 2022 |
|
RU2799747C1 |
| ЗАПОМИНАЮЩАЯ ЯЧЕЙКА | 0 |
|
SU219634A1 |
| CN 201359471 Y, 09.12.2009 | |||
| WO 2009064368 A1, 22.05.2009 | |||
| DE 69703118 D1, 19.10.2000 | |||
| EP 3377842 B1, 09.06.2021. | |||

