Изобретение относится к области оптико-электронного приборостроения и может быть использовано в следящих системах, предназначенных для навигации по звездам.
Основной задачей оптико-электронного следящего устройства (ОЭСУ) является круглосуточное наблюдение звезд в навигационных целях путем наведения и длительного удержания его оптической оси в направлении звезд, в том числе неярких, с помощью поворотной платформы.
Возможность регистрации звезд на изображении участка небесной сферы и точность определения параметров ориентации зависит от отношения полезного сигнала от звезды к шуму фона. Основным источником шума является рассеянный свет в столбе атмосферы, находящемся в поле зрения прибора. Уменьшение фонового излучения на пиксель, пропорциональное квадрату углового размера элемента разрешения, зависит при заданном размере пикселя только от фокусного расстояния оптической системы. Следовательно, увеличение фокусного расстояния оптической системы устройства существенно повышает отношение сигнал/шум (Сборник трудов (13-16 сентября 2010 года, Россия, Таруса) Второй Всероссийской научно-технической конференции «Современные проблемы ориентации и навигации космических аппаратов», стр. 15-18).
Известен, разработанный в ГАИШ МГУ (Сборник трудов (10-13 сентября 2012 года, Россия, Таруса) Третьей Всероссийской научно-технической конференции «Современные проблемы ориентации и навигации космических аппаратов», стр. 69-78), звездный датчик, который содержит зеркально-линзовый объектив, фотоприемное устройство (ФПУ) и блок обработки информации. Фокусное расстояние объектива F’ = 380 мм, диаметр входного зрачка 100 мм, габаритные размеры составляют ∅130×260 мм. Недостатком этого звездного датчика являются большие габаритные размеры, не позволяющие использовать его в системе с кардановым подвесом.
Наиболее близким к заявляемому оптико-электронному следящему устройству по количеству совпадающих признаков, является оптико-электронный следящий координатор (см. патент на изобретение RU 2395108 С1, МПК7 G02B 26/10 опубл. 10.03.2010 г.), содержащий трехосный карданов подвес с приводами и датчиками угла и момента, установленные на внутренней раме карданова подвеса фокусирующий объектив, состоящий из вогнутого главного зеркала, плоского контрзеркала, установленного под углом к оптической оси и снабженного приводом, фильтра, установленного в фокальной плоскости фокусирующего объектива, линзовую систему переноса изображения и фотоприемное устройство, состоящее из двух линеек чувствительных элементов, блок обработки видеосигнала, блок вычисления и блок управления линией визирования. Расстояние L от вершины главного вогнутого зеркала до плоского контрзеркала определяется выбором фокусного расстояния главного зеркала f’ГЗ и удовлетворяет условию f’ГЗ / 2 < L < f’ГЗ - Система переноса изображения выполнена линзовой, что приводит к увеличению общей длины и вносит нежелательные хроматические аберрации.
Описанный координатор предназначен для использования в устройствах наведения для решения задач обеспечения помехозащищенности от ложных тепловых целей, при высокой точности стабилизации оптической оси, совмещаемой с линией визирования, и возможности отклонения оптической оси на большие углы пеленга.
Ранее указывалось, что основным параметром, влияющим на способность устройства слежения визировать звезды, является повышение углового разрешения, зависящее при заданном размере пикселя только от фокусного расстояния его оптической системы.
По этой причине оптическая система прототипа, фокусирующий объектив которого состоит из одного силового элемента, а система переноса изображения выполнена линзовой, не может оставаться компактной при увеличении фокусного расстояния. Данное обстоятельство является недостатком при использовании в устройствах, предназначенных для навигации по звездам.
Задачей, на решение которой направлено изобретение, является повышение вероятности регистрации неярких звезд путем уменьшения фонового сигнала от рассеянного солнечного излучения за счет увеличения фокусного расстояния оптической системы оптико-электронного следящего устройства при обеспечении ее компактности.
Указанная цель достигается тем, что в оптико-электронном следящем устройстве, содержащем двухосный карданов подвес с электроприводами и датчиками угла, установленные в нем фокусирующий объектив, формирующий промежуточное изображение и состоящий из последовательно установленных по ходу лучей первого асферического вогнутого зеркала с центральным отверстием и второго зеркала, систему переноса изображения и фотоприемное устройство, а также последовательно соединенные с фотоприемным устройством блок обработки видеосигнала, блок вычисления, выполненный с возможностью подключения к бортовой информационной системе и на который поступают сигналы с датчиков угла, и блок управления, сигналы с которого поступают к электроприводам карданова подвеса, в фокусирующем объективе второе зеркало выполнено выпуклым, система переноса изображения выполнена зеркальной и состоит из последовательно установленных по ходу лучей первого асферического вогнутого зеркала с центральным отверстием и второго выпуклого зеркала с центральным отверстием, установленного вблизи плоскости промежуточного изображения, при этом выполняются следующие соотношения:
где βСПИ - увеличение системы переноса изображения;
 - фокусные расстояния оптической системы и фокусирующего объектива соответственно;
- фокусные расстояния оптической системы и фокусирующего объектива соответственно;
L - длина системы от вершины второго зеркала до плоскости чувствительных элементов фотоприемного устройства.
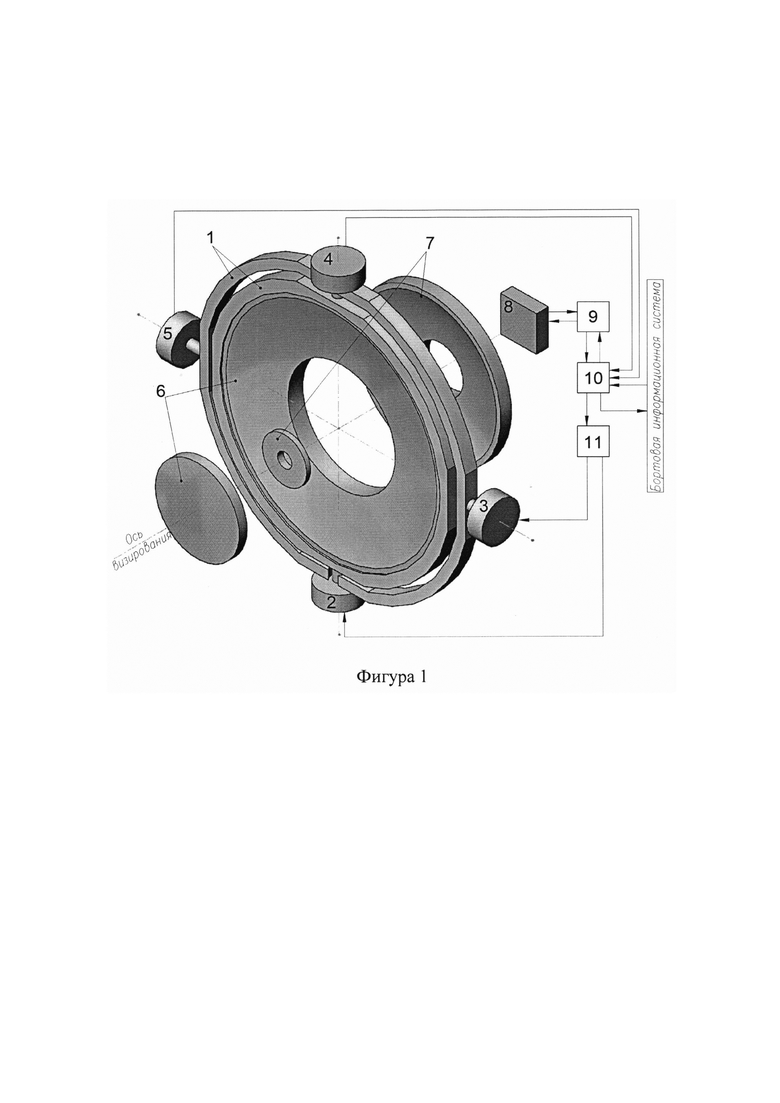
На фигуре 1 представлена функциональная схема оптико-электронного следящего устройства.
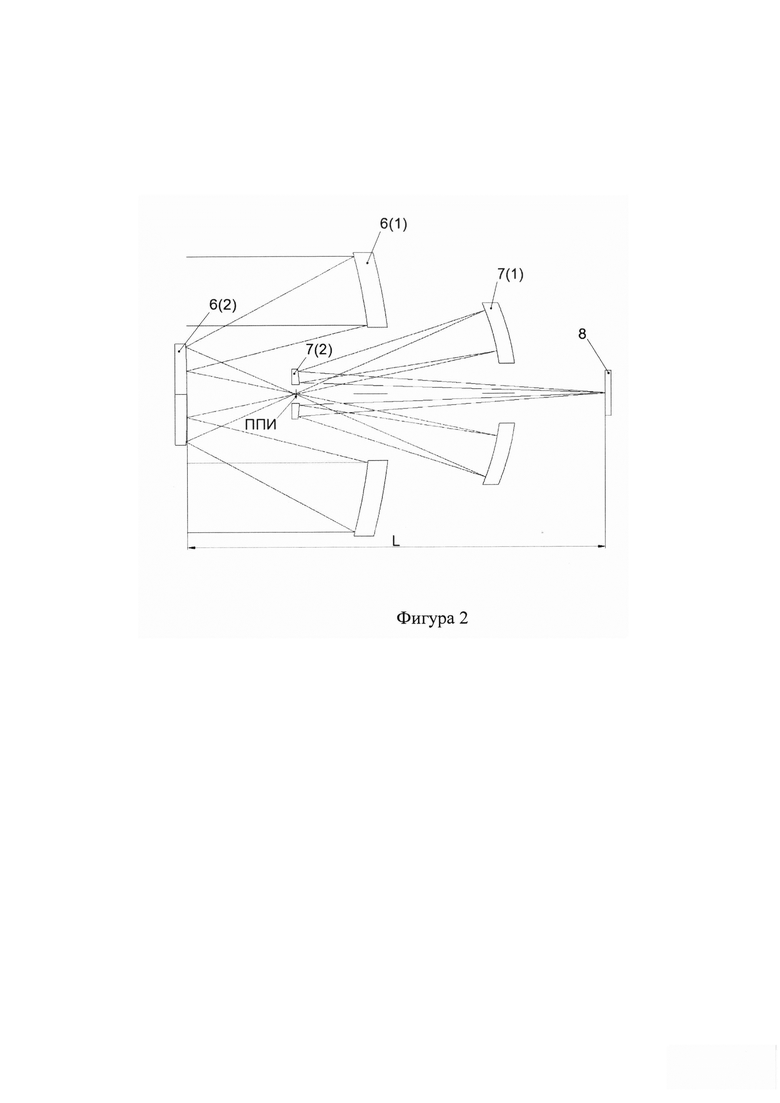
На фигуре 2 представлена схема оптической системы оптико-электронного следящего устройства с ходом лучей.
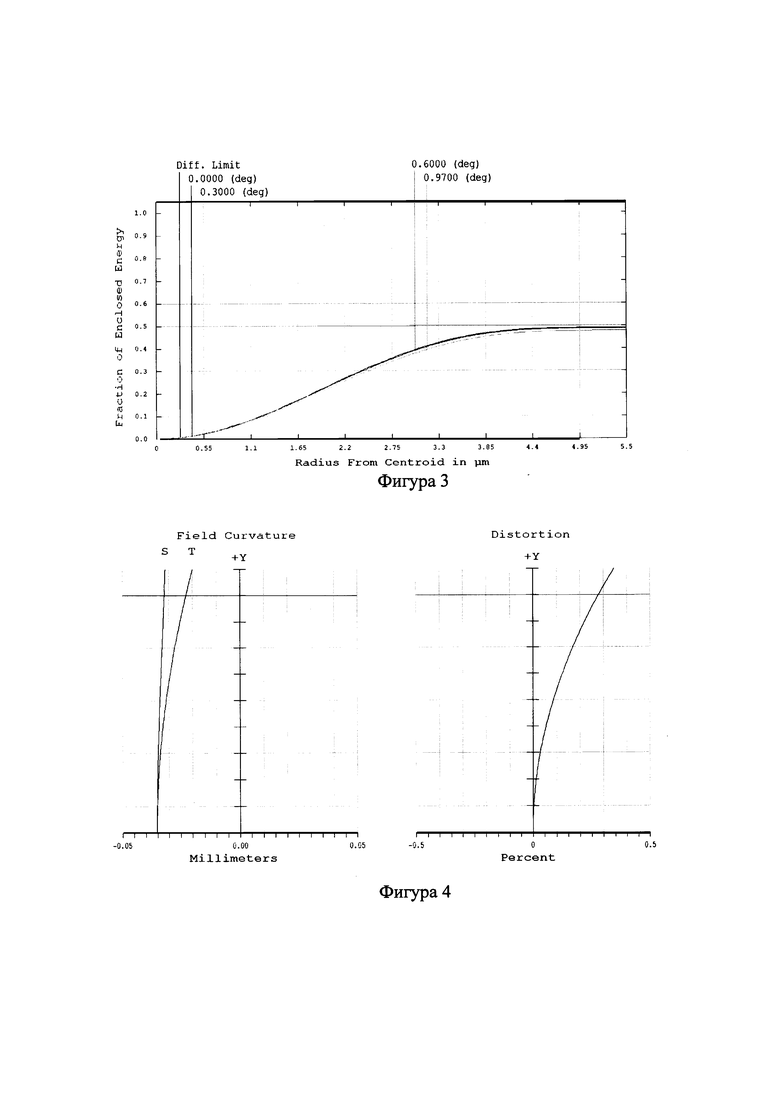
На фигуре 3 представлены графики функции концентрации энергии (ФКЭ) в пятне рассеяния лучей оптической системы.
На фигуре 4 представлены графики кривизны поля и дисторсии оптической системы.
Оптико-электронное следящее устройство, содержит двухосный карданов подвес 1 с электроприводами 2 и 3 и датчиками угла 4 и 5, установленные в нем фокусирующий объектив 6, формирующий промежуточное изображение и состоящий из последовательно установленных по ходу лучей первого асферического вогнутого зеркала с центральным отверстием 6(1) и второго зеркала 6(2), систему переноса изображения 7 и фотоприемное устройство 8, а также последовательно соединенные с фотоприемным устройством 8 блок обработки видеосигнала 9, блок вычисления 10, выполненный с возможностью подключения к бортовой информационной системе (на схеме не показана), и на который поступают сигналы с датчиков угла 4, 5, и блок управления 11, сигналы с которого поступают к электроприводам карданова подвеса 2,3. Отличием является то, что в фокусирующем объективе 6 второе зеркало 6(2) выполнено выпуклым, система переноса изображения 7 выполнена зеркальной и состоит из последовательно установленных по ходу лучей первого асферического вогнутого зеркала 7(1) с центральным отверстием и второго выпуклого зеркала 7(2) с центральным отверстием, установленного вблизи плоскости промежуточного изображения, при этом выполняются следующие соотношения:
где βСПИ - увеличение системы переноса изображения 7;
- фокусные расстояния оптической системы 6, 7 и фокусирующего объектива 6 соответственно;
L - длина системы 6,7 от вершины второго зеркала 6(2) до плоскости чувствительных элементов фотоприемного устройства 8.
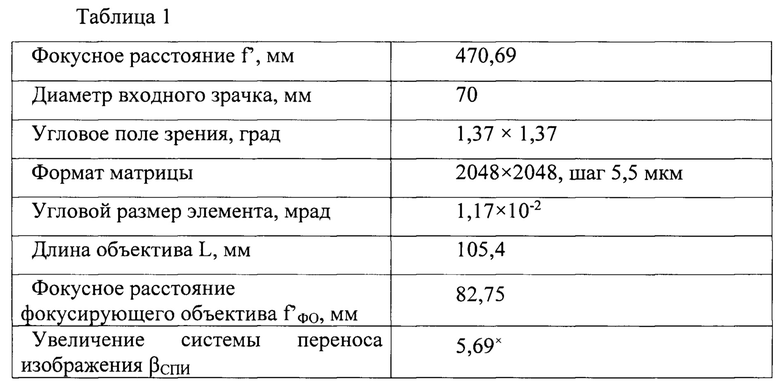
В таблице 1 приведены технические характеристики оптико-электронного следящего устройства.
В таблице 2 приведены конструктивные параметры примера конкретного исполнения оптической системы.

Как видно из таблицы 1 фокусное расстояние оптической системы устройства составляет f’ = 470,69 мм, увеличение фокусного расстояния обеспечивается выбором фокусного расстояния фокусирующего объектива, увеличением системы переноса изображения (f’ = f’ФО × βСПИ) и конструктивным исполнением зеркальных элементов (зеркала 6(1) и 7(1) выполнены асферическими (таблица 2)). При длине системы 105,35 мм отношение L/f’ составляет 0,224, что обеспечивает компактность устройства. Кроме того выполнение системы переноса изображения зеркальной, в отличие от линзовой системы в прототипе, позволяет устранить хроматические аберрации и кривизну изображения (фигуры 3, 4). Выбор положения зеркала 7(2) вблизи плоскости промежуточного изображения эффективно защищает плоскость чувствительных элементов фотоприемного устройства от «паразитного» излучения.
Оптико-электронное следящее устройство работает следующим образом. Предполагаемые угловые координаты выбранной звезды из бортовой информационной системы поступают в блок вычисления 10, затем сигнал в цифровой форме поступает в блок управления 11. Электроприводы 2 и 3, под управлением блока 11, разворачивают оптическую систему 6-7 в кардановом подвесе 1 в направлении выбранной звезды, излучение от которой попадает на первое зеркало 6(1) фокусирующего объектива 6, отражается от его поверхности, затем отражается от второго зеркала 6(2) фокусирующего объектива 6 и собирается в плоскости промежуточного изображения (ПЛИ), после чего оптической системой 7, последовательно отражаясь зеркалами 7(1) и 7(2), переносится в плоскость чувствительных элементов фотоприемного устройства 8, сигнал с которого поступает в блок обработки видеосигнала 9. В блоке 9 кроме обработки видеосигналов также формируются питающие и управляющие напряжения для ФПУ 8. В блоке вычисления 10, в который поступает информация с блока обработки видеосигнала 9 и датчиков угла 4 и 5, определяется местоположение изображения звезды относительно центра матрицы ФПУ. Электроприводы 2 и 3, под управлением блока 11, осуществляют совмещение изображения звезды с центром матрицы ФПУ и удерживают его от возможных перемещений по кадру, возникающих при эволюциях летательного аппарата. Текущие координаты выбранной звезды в реальном масштабе времени передаются в бортовую информационную систему летательного аппарата для определения его фактического положения.
Таким образом, выполнение оптико-электронного следящего устройства в соответствии предлагаемым техническим решением позволяет повысить вероятность регистрации неярких звезд путем уменьшения фонового излучения, влияющего на отношение сигнал/шум, за счет увеличения фокусного расстояния, повышающего угловое разрешение, при обеспечении компактности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СКАНИРОВАНИЯ И СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2471211C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2008 |
|
RU2396574C2 |
| КООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2016 |
|
RU2644991C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| ОПТИКОЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1996 |
|
RU2101724C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР (ВАРИАНТЫ) | 2008 |
|
RU2395108C2 |
| ДВУХСПЕКТРАЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА | 2015 |
|
RU2621782C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1996 |
|
RU2160453C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1995 |
|
RU2101742C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2470258C1 |
Изобретение может быть использовано в следящих системах, предназначенных для навигации по звездам. Оптико-электронное следящее устройство содержит двухосный карданов подвес с электроприводами и датчиками угла, установленные в нем фокусирующий объектив, состоящий из последовательно установленных по ходу лучей первого асферического вогнутого зеркала с центральным отверстием и второго зеркала, систему переноса изображения и фотоприемное устройство, а также последовательно соединенные с фотоприемным устройством блок обработки видеосигнала, блок вычисления, выполненный с возможностью подключения к бортовой информационной системе и на который поступают сигналы с датчиков угла, и блок управления, сигналы с которого поступают к электроприводам карданова подвеса. В фокусирующем объективе второе зеркало выполнено выпуклым, система переноса изображения выполнена зеркальной и состоит из последовательно установленных по ходу лучей первого асферического вогнутого зеркала с центральным отверстием и второго выпуклого зеркала с центральным отверстием, установленного вблизи плоскости промежуточного изображения. Выполняются соотношения, указанные в формуле изобретения. Технический результат - повышение вероятности регистрации неярких звезд за счет уменьшения фонового излучения и увеличения фокусного расстояния при обеспечении его компактности. 4 ил., 2 табл.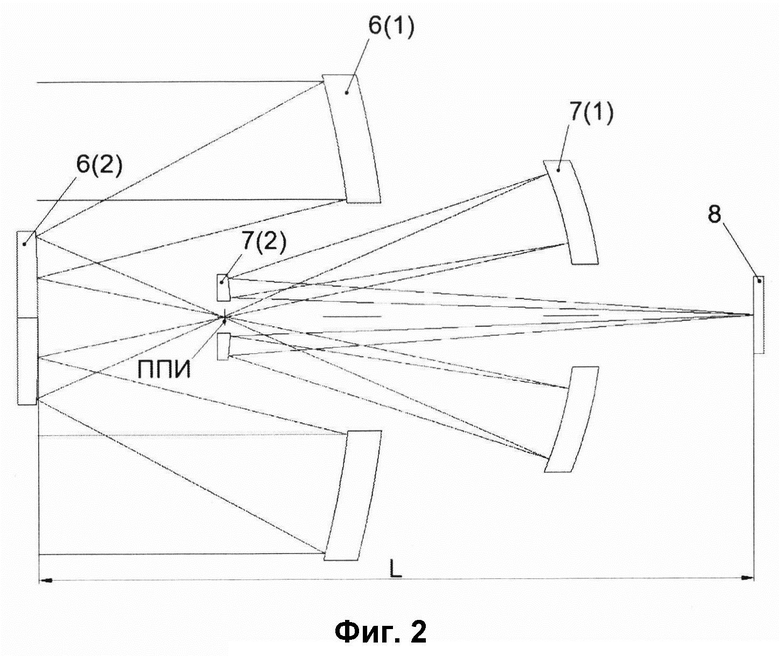
Оптико-электронное следящее устройство, содержащее двухосный карданов подвес с электроприводами и датчиками угла, установленные в нем фокусирующий объектив, формирующий промежуточное изображение и состоящий из последовательно установленных по ходу лучей первого асферического вогнутого зеркала с центральным отверстием и второго зеркала, систему переноса изображения и фотоприемное устройство, а также последовательно соединенные с фотоприемным устройством блок обработки видеосигнала, блок вычисления, выполненный с возможностью подключения к бортовой информационной системе и на который поступают сигналы с датчиков угла, и блок управления, сигналы с которого поступают к электроприводам карданова подвеса, отличающееся тем, что в фокусирующем объективе второе зеркало выполнено выпуклым, система переноса изображения выполнена зеркальной и состоит из последовательно установленных по ходу лучей первого асферического вогнутого зеркала с центральным отверстием и второго выпуклого зеркала с центральным отверстием, установленного вблизи плоскости промежуточного изображения, при этом выполняются следующие соотношения:

где βСПИ - увеличение системы переноса изображения;
 - фокусные расстояния оптической системы и фокусирующего объектива соответственно;
- фокусные расстояния оптической системы и фокусирующего объектива соответственно;
L - длина системы от вершины второго зеркала до плоскости чувствительных элементов фотоприемного устройства.
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР (ВАРИАНТЫ) | 2008 |
|
RU2395108C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ОБЪЕМНЫЙ НАСОС ДЛЯ ПОДАЧИ ПРОБЫ ЖИДКОСТИ В ДАТЧИК АНАЛИЗАТОРА | 1965 |
|
SU207727A1 |
| US 4413177 A, 01.11.1983. | |||

