Объединенные в заявке три изобретения одного и того же назначения, направленные на получение одного и того же технического результата принципиально одним и тем же путем, но разными техническими средствами, относятся к области оптического приборостроения и могут найти применение в оптико-электронных приборах, например, в инфракрасных головках самонаведения (ГСН) управляемых ракет.
В число основных задач, стоящих перед разработками оптико-электронного следящего координатора (ОЭСК), входят:
- обеспечение помехозащищенности от ложных тепловых целей (ЛТЦ);
- высокая точность стабилизации оптической оси, совмещаемой с линией визирования (ЛВ) источника;
- возможность отклонения оптической оси на большие углы пеленга.
Способ защиты от ЛТЦ основан на различии в спектрах излучения воздушных целей и ЛТЦ. Как правило, головки самонаведения, предназначенные для автосопровождения воздушных целей, работают в диапазоне 3-5 мкм. ЛТЦ, имея геометрические размеры значительно меньше, чем у целей, для обеспечения соизмеримой с целями мощности излучения в диапазоне 3-5 мкм должны иметь высокую температуру, что определяет их преимущественно коротковолновый спектр излучения. Система селекции целей от ЛТЦ работает по принципу определения сине-красного отношения, т.е. в ГСН должны быть организованы два спектральных канала приема излучения и по отношению уровней сигнала от одного источника в этих каналах делается заключение о принадлежности данного источника к классу целей или ЛТЦ.
В известном техническом решении - патент RU №2280228, F41G 7/26 раскрыта оптическая система координатора наведения авиационной управляемой ракеты с широкополосным фотоприемником, содержащая обтекатель, гироскоп в кардановом подвесе, обеспечивающий стабилизацию оптической оси координатора в пространстве и ее коррекцию, в котором размещены зеркально-линзовый объектив, щелевидный фильтр инфракрасного и ультрафиолетового диапазона и широкополосный фотоприемник.
Недостатками данной оптической системы координатора слежения являются:
- невозможность изготовления приемника, чувствительного в диапазоне 0,015-4 мкм, из-за отсутствия широкозонных материалов в мировой практике;
- невозможность получения качественного изображения в ультрафиолетовой 0,019-0,22 мкм и инфракрасной 2-3 мкм областях в одной фокальной плоскости единой оптической системы.
Наиболее близким техническим решением, выбранным в качестве прототипа для первого, второго и третьего вариантов группы изобретений, является оптико-электронный следящий координатор, описанный в патенте RU 2101742, G02В 26/10, G01S 3/78, публ. 10.01.98, Бюл. №1. Устройство содержит статор, установленный в кардановом подвесе ротор, включающий закрепленную на постоянном магните ротора оптическую систему, состоящую из главного зеркала, представляющего собой отражающий слой, нанесенный на поверхность постоянного магнита ротора, выполненную с кривизной соответствующей линзы, установленной по ходу лучей между главным зеркалом и контрзеркалом, имеющим центральное отверстие и установленный за контрзеркалом спектроделитель, а также два фотоприемника, которые размещены в центральных отверстиях корректирующей линзы и контрзеркала так, что их светочувствительные площадки совмещены с фокальными плоскостями оптической системы.
К недостаткам данного технического решения следует отнести:
- невозможность обеспечения больших углов пеленга из-за использования внутреннего карданного подвеса;
- увеличение ошибок стабилизации при увеличении угла пеленга (пеленговый член).
Задача, решаемая каждым из изобретений группы, заключается в способности ОЭСК осуществлять выбор и автосопровождение воздушной цели при наличии в поле зрения устройства помеховых источников оптического излучения, а также в обеспечении возможности отклонения оптической оси на большие углы пеленга.
При реализации данных изобретений достигаемый технический результат заключается в расширении поля обзора при одновременном повышении точности стабилизации оптической оси за счет развязки ЛВ от колебаний корпуса ГСН по трем осям и обеспечении помехозащищенности от ложных целей.
Для решения поставленной задачи и обеспечения указанного технического результата в известном ОЭСК, содержащем карданный подвес с датчиками угла и момента, размещенными на двух взаимно перпендикулярных осях Y, Z, установленным в нем объективом с контрзеркалом, снабженным приводом, и фотоприемное устройство, карданный подвес, на внутренней раме которого размещен гиродатчик, закреплен с возможностью вращения вокруг оси X, перпендикулярной осям Y, Z, и имеет датчики угла и момента относительно этой оси, при этом перед фотоприемным устройством, выполненным в виде двух идентичных параллельных многоэлементных линеек, установлен фильтр для каждой из линеек соответствующего диапазона пропускания, а контрзеркало закреплено под углом к оптической оси с возможностью вращения вокруг нее.
В описанном варианте указанный технический эффект достигается всей совокупностью существенных признаков, в том числе полностью установкой карданного подвеса, формой выполнения фотоприемного устройства в виде двух линеек фоточувствительных элементов, введением двух фильтров, каждый из которых устанавливается непосредственно перед соответствующей линейкой, а также установкой контрзеркала с наклоном к оптической оси. В результате этого сигналы принимаются параллельно в двух спектральных диапазонах. По соотношению уровней сигналов от каждого источника в двух диапазонах принимается решение о их принадлежности источника к классу воздушных целей или ЛТЦ.
Изложенный выше принцип технического решения для первого варианта заявляемой группы изобретений может быть применен и во втором изобретении. Технический результат, полученный во втором изобретении группы, также заключается в расширении поля обзора при одновременном повышении точности стабилизации оптической оси и обеспечении помехозащищенности от ЛТЦ.
Указанный технический результат достигается тем, что в известном оптико-электронном следящем координаторе, содержащем карданный подвес с датчиками угла и момента, размещенными на двух взаимно перпендикулярных осях Y, Z, с установленным в нем объективом с контрзеркалом, снабженным приводом, и фотоприемное устройство, карданный подвес, на внутренней раме которого размещен гиродатчик, закреплен с возможностью вращения вокруг оси Х, перпендикулярной осям Y, Z, и имеет датчики угла и момента относительно этой оси, при этом в него дополнительно введены фильтр, установленный в фокальной плоскости объектива, связанный с приводом вращения вокруг оптической оси и выполненный в виде двух спектральных зон пропускания, разделенных по линии, перпендикулярной оптической оси, и оптическая система переноса изображения из фокальной плоскости объектива в плоскость многоэлементной линейки фотоприемного устройства, а контрзеркало установлено с возможностью колебания вокруг оси, параллельной многоэлементной линейке ФПУ, и снабжено датчиком положения, обеспечивающим синхронизацию колебаний контрзеркала с вращением фильтра.
Во втором варианте изобретение характеризуется совокупностью признаков, выражающихся в наличии дополнительных средств (новых в сравнении с прототипом конструктивных элементов), взаимным расположением элементов, формой выполнения элементов и формой выполнения связей, благодаря которым обеспечивается работоспособность устройства. Например, «фильтр связан с приводом вращения…», «контрзеркало установлено с возможностью колебания…», т.е. подчеркивается, что установка элементов не жесткая, как обычно, а иная, которая обеспечивает вращение фильтра и колебания контрзеркала при функциональной (синхронизированной) связи между ними.
Во втором варианте используется одна линейка фоточувствительных элементов в ФПУ и два фильтра. В этом варианте спектральные каналы работают последовательно. При движении контрзеркала в одну сторону на одну половину элементов ФПУ попадает излучение через один фильтр, на вторую половину элементов через второй фильтр, при движении контрзеркала в обратную сторону излучение на первую половину ФПУ попадет через второй фильтр, на вторую половину элементов через первый фильтр. Таким образом, за один период колебания зеркала обеспечивается прием излучения в двух спектральных каналах со сдвигом во времени. В результате имеется возможность определить соотношение уровней сигналов в двух спектральных каналах для каждого источника и установить его принадлежность к классу воздушных целей или ЛТЦ.
Изложенные выше технические решения помехозащиты и стабилизации ЛВ при больших углах пеленга для первого и второго вариантов заявляемой группы изобретений также относятся и к третьему изобретению. Задача, решаемая третьим изобретением группы, и достигаемый технический результат заключаются в расширении поля обзора при одновременном повышении точности стабилизации оптической оси и обеспечении помехозащищенности от ложных тепловых целей.
Для решения поставленной задачи и обеспечения заявляемого технического результата в известном ОЭСК, содержащем карданный подвес с датчиками угла и момента, размещенными на двух взаимно перпендикулярных осях Y, Z, установленные в нем объектив с контрзеркалом, снабженным приводом, и фотоприемное устройство, карданный подвес, на внутренней раме которого размещен гиродатчик, закреплен с возможностью вращения вокруг оси Х, перпендикулярной осям Y, Z, и снабжен датчиками угла и момента относительно этой оси, при этом в него дополнительно введены оптическая система переноса изображения из фокальной плоскости объектива в плоскость многоэлементной линейки фотоприемного устройства, а также фильтр, выполненный в виде двух спектральных зон, разделенных по линии, параллельной многоэлементной линейке ФПУ, и установленный в фокальной плоскости объекта с возможностью линейных колебаний перпендикулярно линии раздела спектральных зон и оптической оси, а контрзеркало наклонено к оптической оси, установлено с возможностью вращения вокруг нее и снабжено датчиком положения, обеспечивающим синхронизацию вращения контрзеркала и колебаний фильтра с отношением частот 2:1.
В третьем варианте в указанной совокупности признаков (одна линейка чувствительных элементов ФПУ и два фильтра) спектральные каналы работают последовательно во времени. При вращении контрзеркала в течение одного оборота излучение на ФПУ попадает через первый фильтр, а в течение следующего оборота контрзеркала излучение на ФПУ поступает через второй фильтр. В результате имеется возможность определения соотношения уровней сигналов в двух спектральных каналах для каждого источника, по которому делают вывод о его принадлежности к классу воздушных целей или ЛТЦ.
Предпочтительность варианта зависит от конструктивных возможностей и наличия элементной базы.
Изобретение поясняется чертежами, где:
на фиг.1 - изображена общая схема устройства ОЭСК, оптическая система которой выполнена по первому варианту;
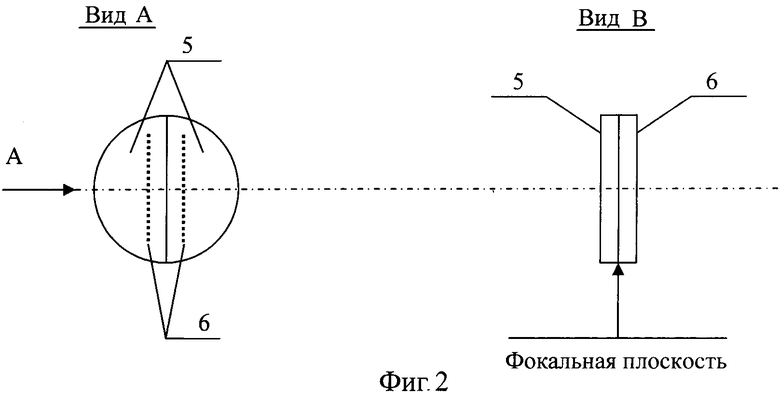
на фиг.2 - показано взаимное расположение фильтров и чувствительных элементов (вид по стрелке А, вид по стрелке В);
на фиг.3 - изображена оптическая система ОЭСК, выполненная по второму варианту;
на фиг.4 - изображена оптическая система ОЭСК, выполненная по третьему варианту.
На фиг.5 - дано графическое изображение связи положения контрзеркала и смещением фильтра (по третьему варианту), при этом:
φ - угол поворота контрзеркала относительно оптической оси (ОО);
Δ - смещение фильтра перпендикулярно оптической оси (ОО);
Uвых - выходное напряжение датчика положения контрзеркала.
ОЭСК (фиг.1) содержит оптическую систему, состоящую из главного зеркала 1, контрзеркал 2, снабженного приводом 3 и датчиком положения 4, оптического фильтра 5 и ФПУ 6. Главное зеркало 1, установленное на внутренней раме карданного подвеса с возможностью вращение вокруг осей Z, Y, X, снабжено соответствующими датчиками момента и угла 7-8; 9-10; 11-12, при этом на внутренней раме карданного подвеса установлен гиродатчик 13.
Выход ФПУ 6 соединен с блоком обработки видеосигнала 14, подключенного через вычислительный блок 15 к блоку управления линией визирования 16, соединенного входами с датчиками угла z 8, y 10, х 12 и гиродатчиком 13, а выходами с датчиками момента по осям X, Y, Z, 7-9-11.
На фиг.2 и 4 показана оптическая система переноса изображения 17 и привод фильтра 18.
Работу ОЭСК рассмотрим на следующих примерах.
Пример 1
Излучение от источников, находящихся в поле зрения координатора, попадает на главное зеркало 1. Отразившись от зеркала, затем от контрзеркала 2 и пройдя через фильтр 5, излучение фокусируется на фоточувствительной площадке ФПУ 6, установленного в фокальной плоскости. Контрзеркало 2, наклоненное к оптической оси объектива (ОО) и вращающееся вокруг нее, выполняет перенос изображения источника излучения по кругу, радиус которого определяется углом наклона контрзеркала 2. При пересечении изображением фоточувствительных элементов ФПУ 6 на последнем возникает импульс напряжения, пропорциональный мощности излучения, попавшего на ФПУ 6. В принятом импульсе содержится информация о положении источника излучения относительно оптической оси (ОО) и о мощности излучения в данном спектральном диапазоне. Сигнал с ФПУ 6 усиливается и выделяется в блоке обработки видеосигнала 14. Для тех сигналов (в двух спектральных каналах), которые принадлежат одному источнику, в блоке 15 вычисляется отношение уровней этих сигналов (сине-красное отношение) и по его величине определяется принадлежность источника к истинной воздушной цели или к ЛТЦ.
Выделенный таким образом сигнал цели поступает в блок управления ЛВ 16, в котором с учетом гиродатчика 13 формируется сигнал управления приводами, обеспечивающими совмещение оптической оси с линией визирования.
Пример 2
В соответствии с признаками, изложенными во втором варианте фиг.3, контрзеркало 2, колеблющееся относительно оптической оси (ОО), перемещает изображение источника поперек линейки ФПУ 6. При пересечении изображением фоточувствительных элементов ФПУ 6 на последнем возникает импульс напряжения, пропорциональный мощности излучения, попавшего на ФПУ 6. В принятом импульсе содержится информация о положении источника излучения относительно оптической оси (OO) и о мощности излучения в данном спектральном диапазоне. При движении контрзеркала 2 в одну сторону изображения на первую половину элементов ФПУ 6 сигнал попадает через первую половину фильтра 5 (фильтр 5 выполнен в виде двух идентичных половин, соответствующего спектрального диапазона), а на вторую половину элементов ФПУ 6 сигнал попадает через вторую половину фильтра 5. Положение источников относительно оптической оси ОО и амплитуды их сигналов запоминаются. При движении контрзеркала 2 в другую сторону процесс повторяется. На первую половину ФПУ 6 приходит сигнал через вторую половину фильтра 5, а на вторую половину элементов ФПУ 6 приходит сигнал через первую половину фильтра 5. Для тех сигналов (в двух спектральных каналах), которые принадлежат одному источнику, в блоке 15 вычисляется отношение уровней этих сигналов (сине-красное отношение) и по его величине определяется принадлежность источника к истинной воздушной цели или к ЛТЦ.
Выделенный таким образом сигнал цели поступает в блок управления ЛВ 16, в котором с учетом гиродатчика 13 формируется сигнал управления приводами, обеспечивающими совмещение оптической оси с линией визирования.
Пример 3
В третьем варианте (фиг.4) вращающееся относительно оптической оси контрзеркало 2 выполняет перенос изображения источника излучения по кругу с частотой вращения контрзеркала 2, а фильтр 5 соответствующего спектрального диапазона, выполненный в виде двух идентичных половин, перемещается поперек оптической оси с частотой вдвое меньшей частоты вращения контрзеркала 2 (см. фиг.5). Таким образом, попеременно, через каждый оборот контрзеркала 2 осуществляется прием излучения в первом и во втором спектральном диапазоне. Затем для каждого источника определяется положение относительно оптической оси и амплитуда сигнала, которые запоминаются. Для тех сигналов (в двух спектральных каналах), которые принадлежат одному источнику, в блоке 15 вычисляется отношение уровней этих сигналов (сине-красное отношение) и по его величине определяется принадлежность источника к истинной воздушной цели или к ЛТЦ.
Выделенный таким образом сигнал цели поступает в блок управления ЛВ 16, в котором с учетом гиродатчика 13 формируется сигнал управления приводами, обеспечивающими совмещение оптической оси с линией визирования.
При этом во всех вариантах сигналы датчиков угла z(8), y(10), х(12) используются для отработки целеуказания, задаваемого внешними устройствами.
Таким образом, предлагаемые технические решения обеспечивают расширение поля обзора (увеличение углов пеленга), которое достигается конструктивнами возможностями, т.е. поворотом координатора вокруг оси Y на углы ±90° и более и поворотом вокруг оси Х на углы более 360°. В результате происходит отклонение оптической оси в пределах полусферы и более. Точность стабилизации достигается благодаря установке двухосного гиродатчика на внутренней раме карданного подвеса, управлению приводами по осям X, Y и Z, развязке от колебаний ГСН по оси X. Указанные конструкции позволяют устанавливать многоэлементные ФПУ и оптические фильтры, обеспечивающие прием излучения в двух спектральных диапазонах и обеспечивать помехозащищенность от ЛТЦ.
При этом второй и третий варианты позволяют использовать более простой по сравнению с первым вариантом ФПУ, состоящий из одной линейки и последовательный во времени спектральный анализ.
Для изготовления устройств могут частично использоваться стандартные блоки, материалы и оборудование.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКОЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1996 |
|
RU2101724C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1996 |
|
RU2160453C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1995 |
|
RU2101742C1 |
| КООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2016 |
|
RU2644991C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО С МЕХАНИЧЕСКОЙ РАЗВЕРТКОЙ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2340922C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 2022 |
|
RU2799891C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| СИСТЕМА ПОСАДКИ САМОЛЕТОВ | 1994 |
|
RU2086471C1 |



Изобретение относится к области оптического приборостроения и может найти применение в оптико-электронных приборах. В первом варианте оптико-электронный следящий координатор содержит карданный подвес с датчиками угла и момента, размещенными на двух взаимно перпендикулярных осях Y, Z, установленные в нем объектив, главное зеркало, контрзеркало, снабженное приводом, и фотоприемное устройство. Карданный подвес, на внутренней раме которого размещен гиродатчик, закреплен с возможностью вращения вокруг оси X, перпендикулярной осям Y, Z, и снабжен датчиками угла и момента относительно этой оси. Перед фотоприемным устройством, выполненным в виде двух идентичных параллельных многоэлементных линеек, установлен фильтр для каждой из линеек соответствующего диапазона пропускания. Контрзеркало закреплено под углом к оптической оси с возможностью вращения вокруг нее. Технический результат заключается в расширении поля обзора при одновременном повышении точности стабилизации оптической оси и обеспечении помехозащищенности. 3 н.п. ф-лы, 5 ил.
1. Оптико-электронный следящий координатор (ОЭСК), содержащий карданный подвес с датчиками угла и момента, размещенными на двух взаимно перпендикулярных осях Y, Z, установленные в нем объектив, главное зеркало, контрзеркало, снабженное приводом, и фотоприемное устройство, отличающийся тем, что карданный подвес, на внутренней раме которого размещен гиродатчик, закреплен с возможностью вращения вокруг оси X, перпендикулярной осям Y, Z, и снабжен датчиками угла и момента относительно этой оси, при этом перед фотоприемным устройством, выполненным в виде двух идентичных параллельных многоэлементных линеек, установлен фильтр для каждой из линеек соответствующего диапазона пропускания, а контрзеркало закреплено под углом к оптической оси с возможностью вращения вокруг нее.
2. ОЭСК, содержащий карданный подвес с датчиками угла и момента, размещенными на двух взаимно перпендикулярных осях Y, Z, установленные в нем объектив, главное зеркало, контрзеркало, снабженное приводом, и фотоприемное устройство, отличающийся тем, что карданный подвес, на внутренней раме которого размещен гиродатчик, закреплен с возможностью вращения вокруг оси X, перпендикулярной осям Y, Z, и снабжен датчиками угла и момента относительно этой оси, при этом в него дополнительно введены фильтр, установленный в фокальной плоскости объектива, связанный с приводом вращения вокруг оптической оси и выполненный в виде двух спектральных зон пропускания, разделенных по линии, перпендикулярной оптической оси, и оптическая система переноса изображения из фокальной плоскости объектива в плоскость многоэлементной линейки фотоприемного устройства, а контрзеркало установлено с возможностью колебания вокруг оси, параллельной многоэлементной линейке фотоприемного устройства, и снабжено датчиком положения, обеспечивающим синхронизацию колебаний контрзеркала с вращением фильтра.
3. ОЭСК, содержащий карданный подвес с датчиками угла и момента, размещенными на двух взаимно перпендикулярных осях Y, Z, установленные в нем объектив, главное зеркало, контрзеркало, снабженное приводом, и фотоприемное устройство, отличающийся тем, что карданный подвес, на внутренней раме которого размещен гиродатчик, закреплен с возможностью вращения вокруг оси X, перпендикулярной осям Y, Z, и снабжен датчиками угла и момента относительно этой оси, при этом в него дополнительно введены оптическая система переноса изображения из фокальной плоскости объектива в плоскость многоэлементной линейки фотоприемного устройства и фильтр, выполненный в виде двух спектральных зон, разделенных по линии, параллельной многоэлементной линейке фотоприемного устройства, и установленный в фокальной плоскости объектива с возможностью линейных колебаний перпендикулярно линии раздела спектральных зон и оптической оси, а контрзеркало наклонено к оптической оси, установлено с возможностью вращения вокруг нее и снабжено датчиком положения, обеспечивающим синхронизацию вращения контрзеркала и колебаний фильтра с отношением частот 2:1.
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1995 |
|
RU2101742C1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| Пюпитр | 1928 |
|
SU13578A1 |
| US 4413177 А1, 01.11.1983. | |||

