Область техники, к которой относится настоящее изобретение
В настоящем раскрытии описаны системы и способы центрирования круглого объекта, такого как чашка Петри, между множеством стержней.
Предшествующий уровень техники настоящего изобретения
С развитием компьютеров, сетей и робототехники автоматизация стала полезным инструментом оптимизации большого спектра рабочих процессов. Например, автоматизацию используют в лабораторных условиях для оптимизации разных процессов подготовки биологических образцов (например, взятых у пациентов образцов, образцов окружающей среды и т.д.) для лабораторных анализов. Автоматизация таких задач может (а) снижать затраты на персонал, (b) снижать субъективные погрешности (например, ошибки людей), которые могут возникать, например, когда операторы устают, отвлекаются или иным образом теряют концентрацию, и (с) сокращать время, необходимое для анализа образцов и отчета о результатах.
Например, в заявке на патент США №14/674827 («заявка '827»), поданной 31 марта 2015 года и опубликованной в виде публикации заявки на патент США №2015/0276566 А1, раскрытие которой включено в данный документ посредством ссылки, описана автоматизированная платформа для посева во множество емкостей биологических образцов для проведения тестов и анализов. В некоторых вариантах осуществления автоматизированная платформа содержит модуль посева и модуль посева штрихом, модуль посева высевает в емкости (например, чашки Петри, планшеты, пробирки с бульоном, предметные стекла и т.д.) биологические образцы. Это можно выполнять с помощью пипеточного дозатора, бактериальной петли, тампона и т.д. Во время посева в чашки Петри модуль посева также может распределять в чашки Петри магнитные шарики. После посева в чашки Петри их можно транспортировать по конвейерной системе в модуль посева штрихом. В некоторых вариантах осуществления модуль посева штрихом содержит магниты, которые могут обеспечивать с помощью магнитных шариков, помещенных в чашках Петри, посев штрихом инокулированной образцом среды (например, кровяного агара, шоколадного агара, агара Мак-Конки и т.д.) согласно заданной схеме. После проведения посева штрихом в чашки Петри их можно транспортировать в инкубационную систему. Дополнительные детали, касающиеся этой автоматизированной платформы, можно найти в заявке '827.
В качестве другого примера, в заявке на патент США №14/687400 («заявка '400»), поданной 15 апреля 2015 года и опубликованной в виде публикации заявки на патент США №2015/0299639 А1, раскрытие которой включено в данный документ посредством ссылки, описан встроенный инкубатор и модуль получения изображений, который регулирует атмосферу в инкубаторе и получает цифровые изображения экземпляров образцов высокого разрежения. В некоторых вариантах осуществления инкубатор имеет корпус шкафного исполнения, который позволяет обеспечить регулируемую среду для содержимого инкубатора. В некоторых вариантах осуществления в инкубатор помещают чашки Петри, которые содержат питательную среду с инокулированным биологическим образцом, питательная среда и регулируемая атмосфера, обеспечиваемая в инкубаторе, способствуют росту по меньшей мере некоторых микроорганизмов в среде, если они присутствуют в образце, которым была инокулирована среда. В некоторых вариантах осуществления модуль получения изображений представляет собой замкнутый блок, примыкающий непосредственно к инкубатору. Это обеспечивает прямую транспортировку чашек Петри из инкубатора в модуль получения изображений. В модуле получения изображений крышку чашки Петри можно удалить, чтобы блок получения изображений мог получать электронные изображения (например, цифровые фотографии) чашки Петри. После этого крышку можно вернуть, а чашка Петри можно транспортировать назад в инкубатор. В некоторых вариантах осуществления изображения можно автоматически анализировать с использованием программного обеспечения, которое может определить, произошел ли рост микроорганизмов. Дополнительные сведения об этом инкубаторе и модуле получения изображений можно найти в заявке '400.
В качестве еще одного примера, в международной заявке №PCT/US2016/034554 («заявка '554»), поданной 27 мая 2016 года и опубликованной в виде международной публикации №WO 2016/191646 А2, раскрытие которой включено в данный документ посредством ссылки, описаны автоматизированные системы для подготовки биологических образцов как для идентификации (например, время-пролетная масс-спектрометрия с десорбцией и ионизацией с использованием матрицы («MALDI-TOF-MS»)), так и для тестирования чувствительности к антибиотикам («AST»). В некоторых вариантах осуществления автоматизированные системы могут: обнаруживать и выбирать колонию микроорганизмов на чашке для культивирования; получать образец выбранной колонии микроорганизмов; готовить суспензию полученного образца; распределять часть полученного образца на целевой планшет и размещать целевой планшет в устройстве для проведения MALDI для идентификации образца выбранной колонии микроорганизмов; и использовать или перемещать другую часть суспензии для другого теста, такого как AST. AST может представлять собой дисковую диффузию/тест Кирби-Бауэра, дисковое разведение, разведение в бульоне или агаре или другие способы. Дополнительные детали об этой автоматизированной системе можно найти в заявке '554.
Во всех автоматизированных системах, описанных выше, может потребоваться точное центрирование чашек Петри или других аналогичных объектов. Например, что касается заявки '827, может потребоваться точное центрирование чашки Петри перед тем, как в нее можно будет посеять биологический образец. В качестве другого примера, что касается заявки '400, может потребоваться точное центрирование чашек Петри в модуле получения изображений, чтобы можно было точно сравнивать цифровые изображения для обнаружения роста микроорганизмов. В качестве еще одного примера, что касается заявки '554, может потребоваться точное центрирование чашек Петри перед тем, как образцы можно будет точно перемещать из чашек Петри в обычную суспензию.
Системы предшествующего уровня техники для центрирования круглых объектов, таких как чашки Петри, иногда содержат три или более стержней. Во время работы стержни перемещают в центр в сторону чашки Петри до зажимания чашки Петри между всеми стержнями. Однако в таких системах существует вероятность, что стержни могут прекратить перемещение, когда только некоторые (не все) стержни будут касаться чашки Петри. Это может быть вызвано трением дна или боковых сторон чашки Петри или стержней. В таких случаях чашка Петри может быть неправильно отцентрирована. В результате существует потребность в системах и способах грубого и точного центрирования круглых объектов, таких как чашки Петри.
Сущность настоящего изобретения
В настоящем раскрытии описаны системы и способы грубого и точного центрирования круглого объекта, такого как чашка Петри, между множеством стержней. Например, в одном варианте осуществления способ включает размещение круглого объекта на платформе, выполненной с возможностью вращения, окруженной тремя подвижными стержнями. Для грубого центрирования круглого объекта способ дополнительно включает перемещение в первый раз всех стержней по направлению к круглому объекту до тех пор, пока по меньшей мере два из трех стержней не коснутся круглого объекта. Для более точного центрирования круглого объекта способ дополнительно включает: перемещение всех стержней от круглого объекта, чтобы он мог вращаться без существенных помех; поворот платформы приблизительно на 60 градусов, причем поворот платформы также вызывает поворот круглого объекта приблизительно на 60 градусов; и перемещение во второй раз всех стержней по направлению к круглому объекту.
Один аспект настоящего раскрытия относится к способу, включающему: (а) размещение круглого объекта на платформе между тремя или более стержнями, причем стержни расположены приблизительно на одинаковом расстоянии друг от друга, и при этом стержни находятся в первом открытом положении; (b) перемещение в первый раз всех стержней по направлению к круглому объекту в закрытое положение, причем по меньшей мере два стержня находятся в контакте с круглым объектом, когда стержни находятся в закрытом положении; (с) перемещение всех стержней от круглого объекта в первое открытое положение или второе открытое положение, причем круглый объект может вращаться на платформе без помех со стороны стержней, когда стержни находятся в первом открытом положении или втором открытом положении; (d) поворот круглого объекта приблизительно на 8 градусов или приблизительно на 8 градусов плюс один или более полных оборотов по 360 градусов, причем 6 составляет 360 градусов, деленных на удвоенное количество стержней; и (е) перемещение во второй раз всех стержней по направлению к круглому объекту в закрытое положение, причем круглый объект находится приблизительно в центре между всеми стержнями после перемещения всех стержней в закрытое положение во второй раз.
В некоторых вариантах осуществления платформа выполнена с возможностью вращения, а круглый объект вращается за счет поворота платформы. В некоторых вариантах осуществления круглым объектом является чашка Петри. В некоторых вариантах осуществления способ дополнительно включает посев в чашку Петри биологического образца после приблизительного центрирования чашки Петри между всеми стержнями. В некоторых вариантах осуществления способ дополнительно включает получение изображения чашки Петри с помощью модуля получения изображений после приблизительного центрирования чашки Петри между всеми стержнями. В некоторых вариантах осуществления способ дополнительно включает сбор одной или более колоний бактерий в чашке Петри после приблизительного центрирования чашки Петри между всеми стержнями.
Другой аспект настоящего раскрытия относится к способу, включающему: (а) размещение круглого объекта на платформе, расположенной между тремя стержнями, причем стержни расположены приблизительно на одинаковом расстоянии друг от друга, и при этом стержни находятся в первом открытом положении; (b) перемещение в первый раз всех стержней по направлению к круглому объекту в закрытое положение, причем по меньшей мере два стержня находятся в контакте с круглым объектом, когда стержни находятся в закрытом положении; (с) перемещение в первый раз всех стержней от круглого объекта в первое открытое положение или второе открытое положение, причем круглый объект может вращаться на платформе без помех со стороны стержней, когда стержни находятся в первом открытом положении или втором открытом положении; (d) поворот платформы приблизительно на 60 градусов или приблизительно на 60 градусов плюс один или более полных оборотов по 360 градусов, причем поворот платформы также вызывает поворот круглого объекта; и (е) перемещение во второй раз всех стержней по направлению к круглому объекту в закрытое положение, причем круглый объект находится приблизительно в центре между всеми стержнями после перемещения всех стержней в закрытое положение во второй раз.
В некоторых вариантах осуществления круглым объектом является чашка Петри. В некоторых вариантах осуществления способ дополнительно включает удаление крышки, закрывающей чашку Петри, с чашки Петри. В некоторых вариантах осуществления способ дополнительно включает посев в чашку Петри биологического образца после приблизительного центрирования чашки Петри между всеми стержнями. В некоторых вариантах осуществления способ дополнительно включает: (а) перемещение во второй раз всех стержней от круглого объекта в первое открытое положение или второе открытое положение после приблизительного центрирования чашки Петри между всеми стержнями; и (b) ориентирование чашки Петри за счет поворота чашки Петри и выравнивания метки на чашке Петри со считывателем, расположенным около платформы. В некоторых вариантах осуществления способ дополнительно включает получение изображения чашки Петри с помощью модуля получения изображений после приблизительного центрирования чашки Петри между всеми стержнями и ориентирования. В некоторых вариантах осуществления способ дополнительно включает сбор одной или более колоний бактерий в чашке Петри после приблизительного центрирования чашки Петри между всеми стержнями и ориентирования.
Еще один аспект настоящего раскрытия относится к системе, содержащей: (а) платформу, выполненную с возможностью вращения, имеющую верхнюю поверхность и нижнюю поверхность; (b) первый направляющий шкив, имеющий верхнюю поверхность и нижнюю поверхность, причем верхняя поверхность первого направляющего шкива прикреплена к нижней поверхности платформы; (с) второй направляющий шкив, имеющий верхнюю поверхность и нижнюю поверхность, причем второй направляющий шкив расположен под дном первого направляющего шкива, и при этом к дну второго направляющего шкива прикреплены три стойки; и (d) три стержня, расположенных вокруг платформы, выполненной с возможностью вращения, причем стержни расположены приблизительно на одинаковом расстоянии друг от друга, и при этом каждый из стержней прикреплен к створке, имеющей плечо, которое проходит под вторым направляющим шкивом, и при этом каждая из створок соединена с неподвижным валом и может вращаться вокруг этого неподвижного вала, и при этом каждое плечо створок имеет отверстие, окружающее другую из стоек, прикрепленных к дну второго направляющего шкива, причем платформа может вращаться за счет вращения первого направляющего шкива, и при этом стержни могут перемещаться к платформе за счет вращения второго направляющего шкива.
В некоторых вариантах осуществления система дополнительно содержит: (а) первый мотор, имеющий первый ведущий шкив, прикрепленный к валу первого мотора; (b) второй мотор, имеющий второй ведущий шкив, прикрепленный к валу второго мотора; (с) первый ремень, соединенный с первым направляющим шкивом и первым ведущим шкивом; и (d) второй ремень, соединенный со вторым направляющим шкивом и вторым ведущим шкивом, причем сила вращения первого ведущего шкива передается первому направляющему шкиву через первый ремень, и при этом сила вращения второго ведущего шкива передается второму направляющему шкиву через второй ремень.
В некоторых вариантах осуществления система дополнительно содержит один или более процессоров, выполненных с возможностью управления поворотом первого и второго направляющих шкивов за счет управления первым и вторым моторами. В некоторых вариантах осуществления один или более процессоров выполнены с возможностью: (а) перемещения в первый раз всех стержней в сторону чашки Петри, размещенной на платформе, в закрытое положение, причем по меньшей мере два стержня находятся в контакте с чашкой Петри, когда стержни находятся в закрытом положении; (b) перемещения в первый раз всех стержней от чашки Петри в первое открытое положение или второе открытое положение, причем чашка Петри может вращаться на платформе без помех со стороны стержней, когда стержни находятся в первом открытом положении или втором открытом положении; (с) поворота платформы приблизительно на 60 градусов или приблизительно на 60 градусов плюс один или более полных оборотов по 360 градусов; и (d) перемещения во второй раз всех стержней в сторону чашки Петри в закрытое положение, причем круглый объект находится приблизительно в центре между всеми стержнями после перемещения всех стержней в закрытое положение во второй раз.
В некоторых вариантах осуществления система дополнительно содержит считыватель, а один или более процессоров, кроме того, выполнены с возможностью: (а) перемещения во второй раз всех стержней от чашки Петри в первое открытое положение или второе открытое положение после приблизительного центрирования чашки Петри между всеми стержнями; и (b) ориентации чашки Петри за счет поворота платформы и выравнивания метки на чашке Петри со считывателем. В некоторых вариантах осуществления система дополнительно содержит модуль получения изображений, а один или более процессоров, кроме того, выполнены с возможностью получения изображения чашки Петри с помощью модуля получения изображений после приблизительного центрирования чашки Петри между всеми стержнями и ориентирования. В некоторых вариантах осуществления система дополнительно содержит автоматизированный пипеточный дозатор, а один или более процессоров, кроме того, выполнены с возможностью: сбора одной или более колоний бактерий в чашке Петри после приблизительного центрирования чашки Петри между всеми стержнями и ориентирования. Краткое описание фигур
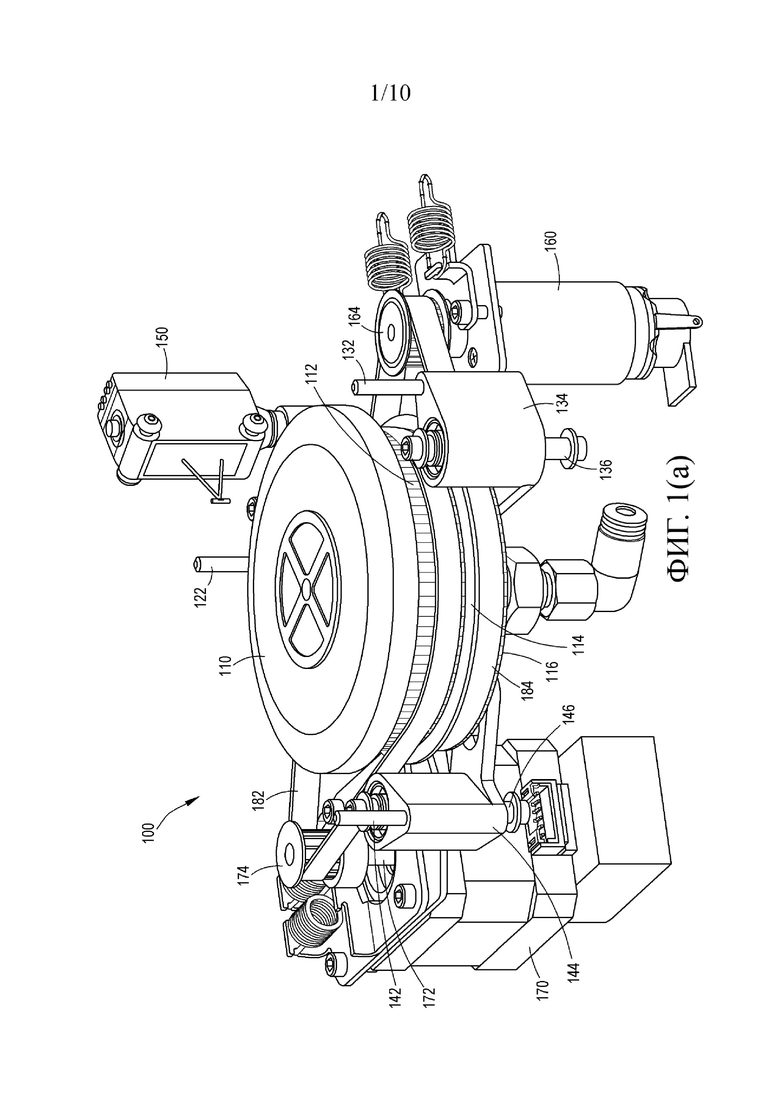
На фиг. 1(a) представлен вид сбоку варианта осуществления системы для центрирования круглого объекта, как описано в настоящем документе.
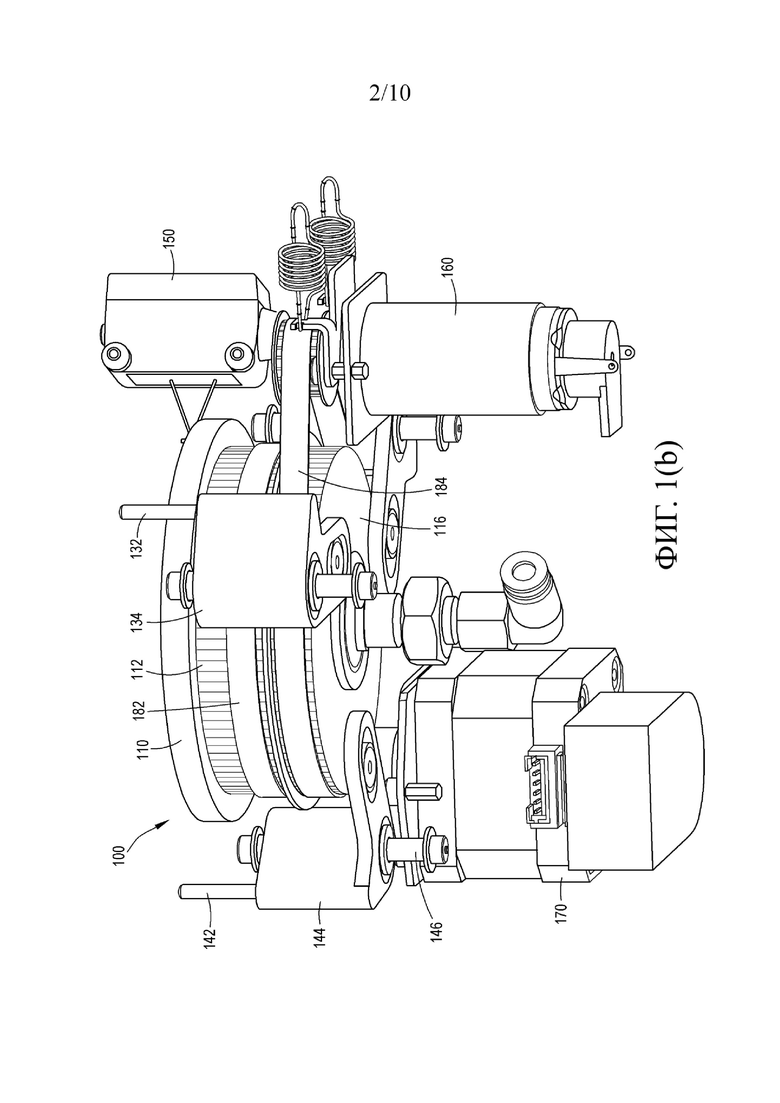
На фиг. 1(b) представлен другой вид сбоку системы фиг.1(a).
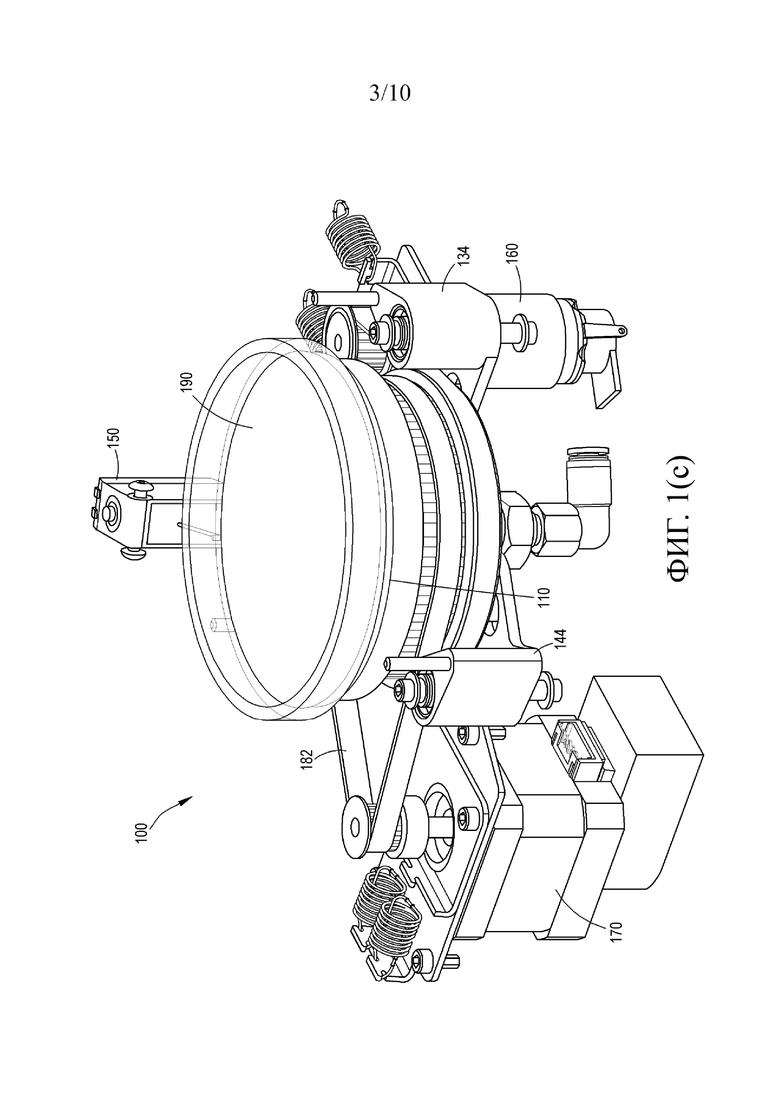
На фиг. 1(c) представлен вид сбоку системы фиг. 1(a) с чашкой Петри, размещенной на платформе системы фиг. 1(a).
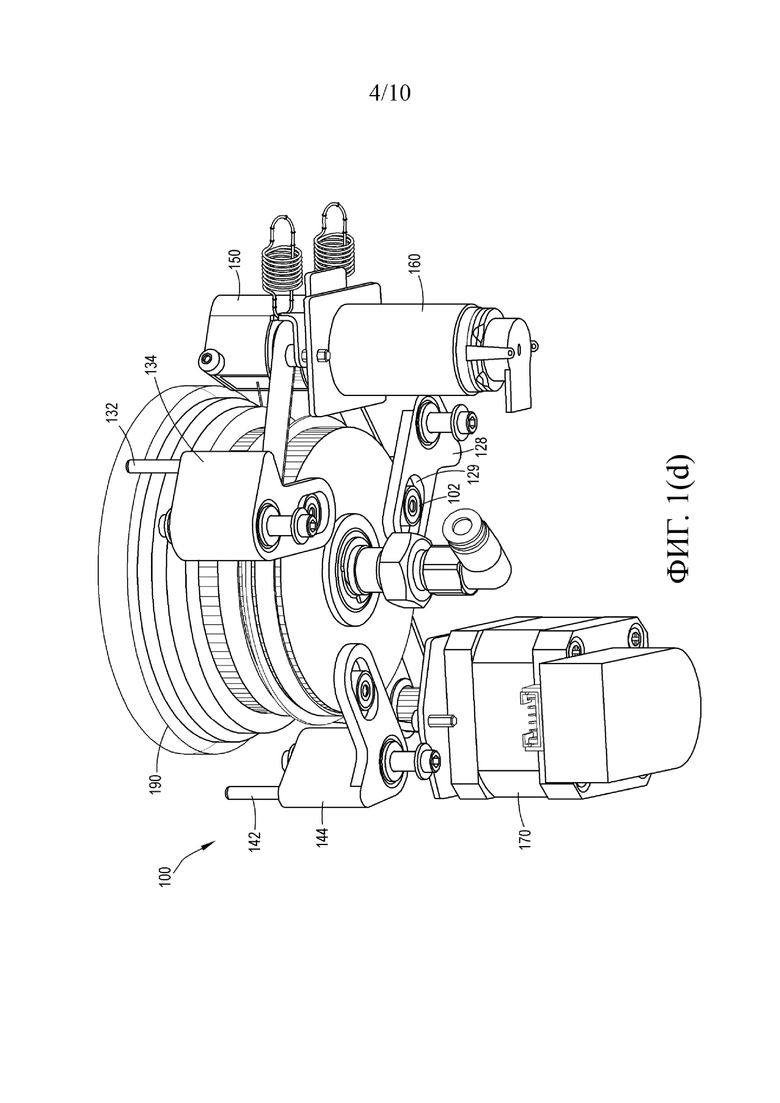
На фиг. 1(d) представлен другой вид сбоку системы фиг. 1(c).
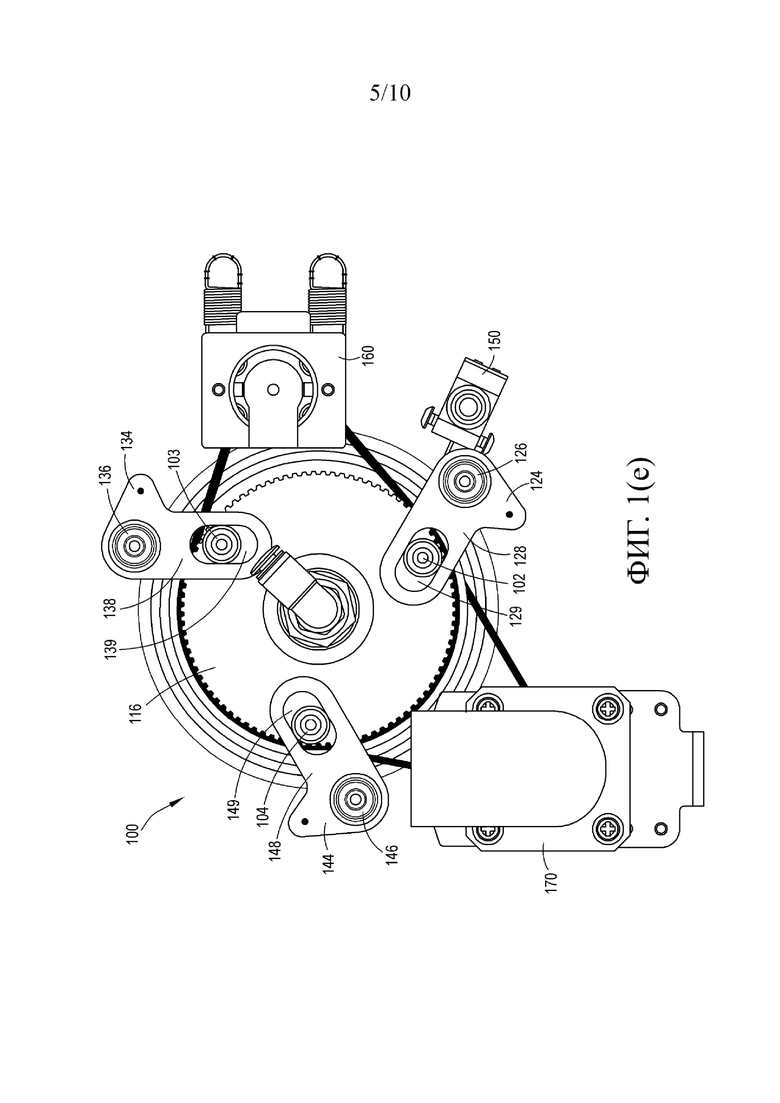
На фиг. 1(e) представлен вид снизу системы фиг. 1(a).
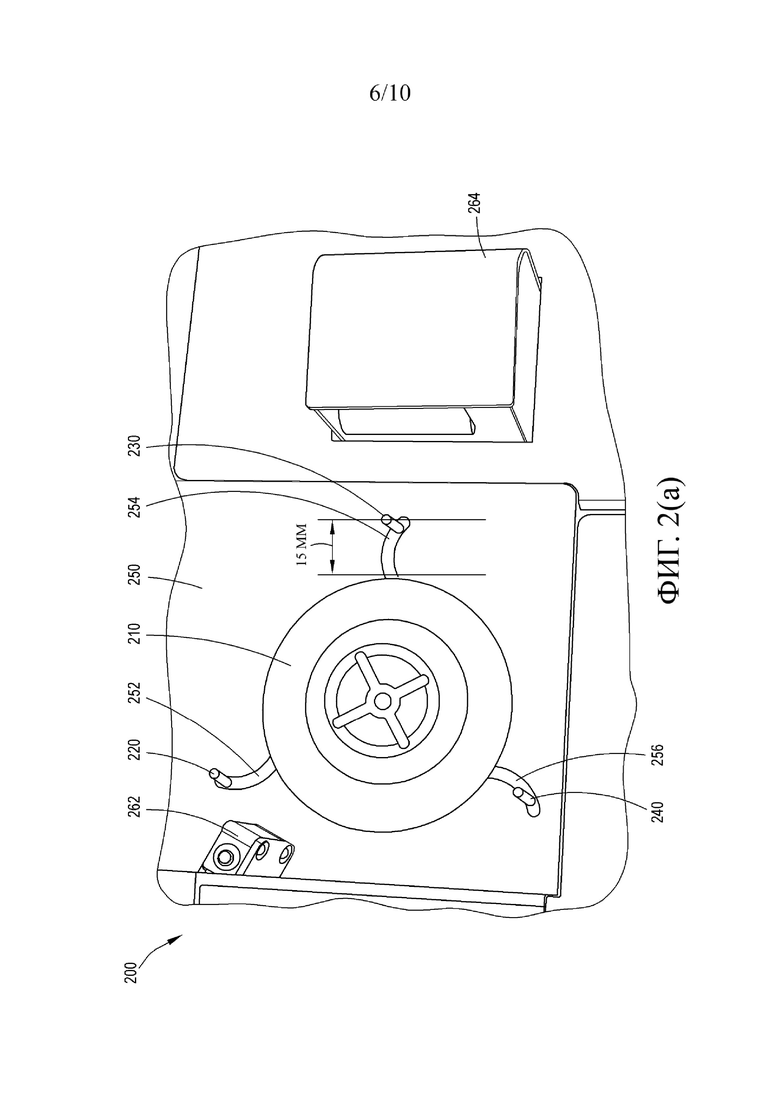
На фиг. 2(a) представлено изображение варианта осуществления системы для центрирования круглого объекта, как описано в настоящем документе.
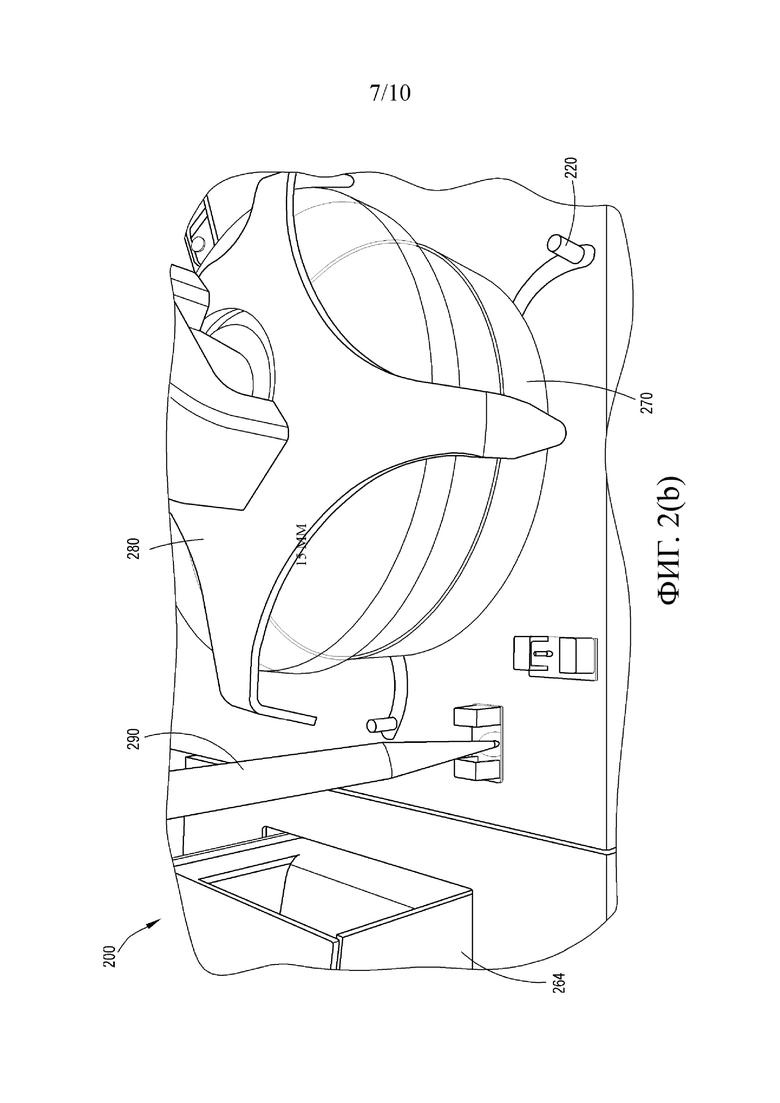
На фиг. 2(b) представлено другое изображение системы фиг. 2(a).
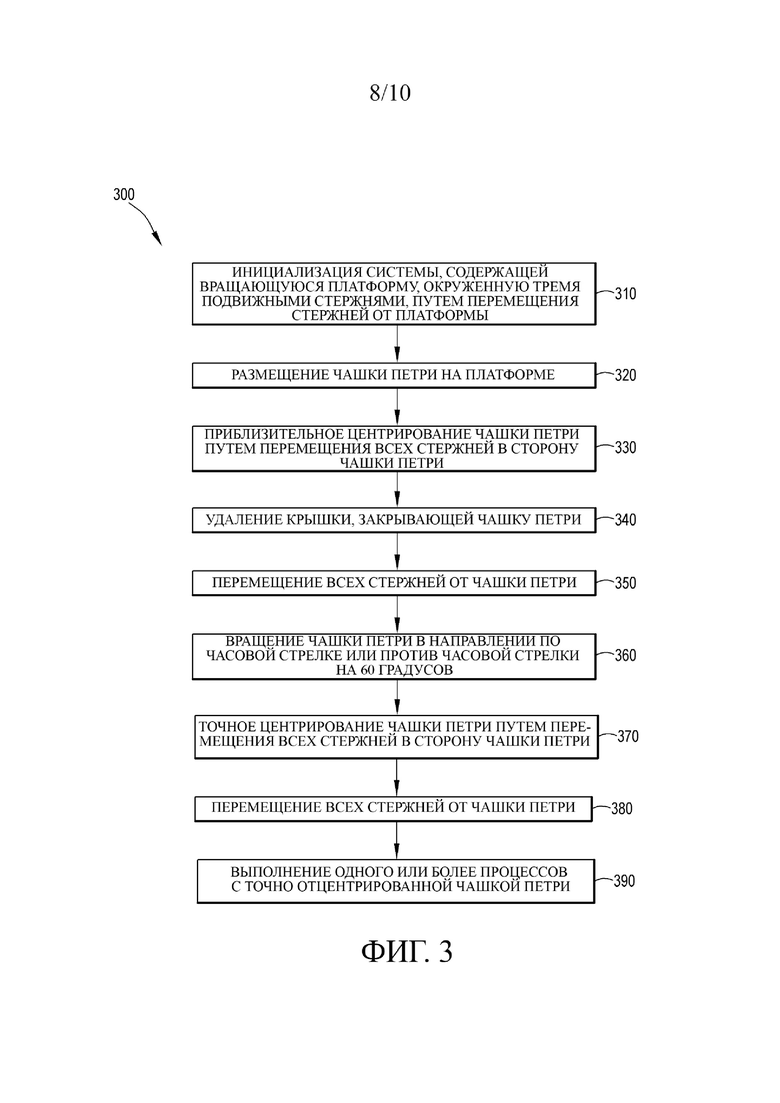
На фиг. 3 представлена блок-диаграмма способа центрирования круглого объекта, как описано в настоящем документе.
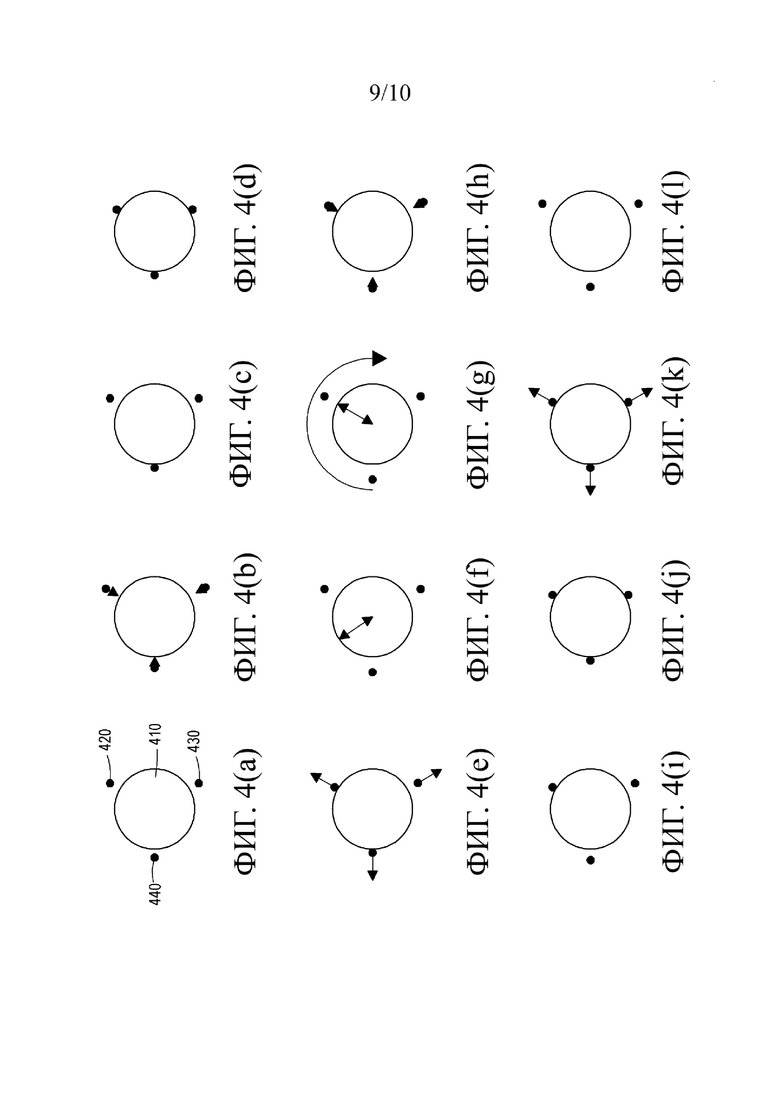
На фиг. 4(а)-(1) представлен способ центрирования круглого объекта, как описано в настоящем документе.
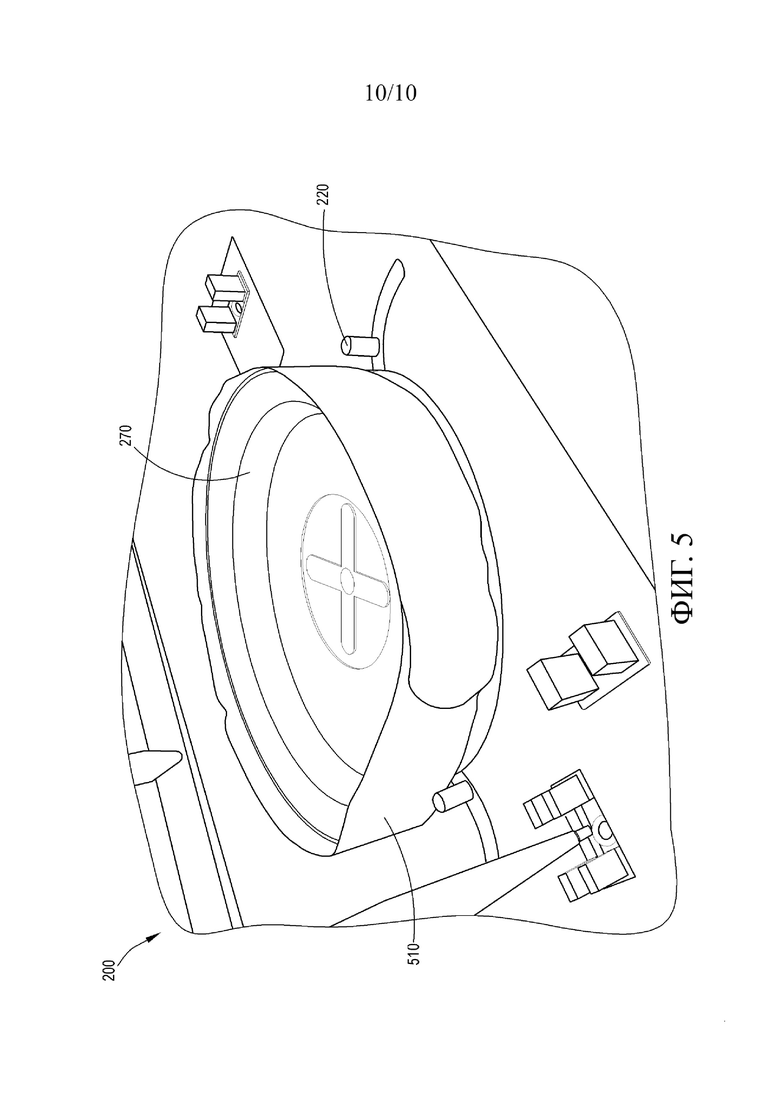
На фиг. 5 представлено изображение теста, проводимого для демонстрации работы системы фиг. 2(а)-(b).
Подробное раскрытие настоящего изобретения
Варианты осуществления настоящего раскрытия подробно описаны со ссылкой на фигуры, на которых одинаковые ссылочные номера указывают аналогичные или идентичные элементы. Следует понимать, что раскрытые варианты осуществления являются просто примерами раскрытия, которые могут быть реализованы в разных формах. Хорошо известные функции или конструкции подробно не описаны, чтобы избежать затруднения понимания настоящего раскрытия ненужными подробностями. Вследствие этого, конкретные конструктивные и функциональные детали, раскрытые в данном документе, не следует интерпретировать в качестве ограничения, но просто в качестве основы для формулы изобретения и в качестве типовой основы для обучения специалистов в данной области разным вариантам использования настоящего раскрытия фактически в любой надлежащим образом детализированной структуре.
На фиг. 1(а)-(е) представлен вариант осуществления системы для центрирования круглого объекта в соответствии с настоящей технологией. Как показано, система 100 содержит платформу 110, стержень 122, стержень 132, стержень 142, датчик 150, мотор 160 и мотор 170. Как показано на фиг. 1(c) и 1(d), на платформе 110 можно разместить чашку Петри 190. В некоторых вариантах осуществления чашку Петри 190 на платформе 110 может автоматически размещать роботизированная рука. После размещения на платформе 110 для центрирования чашки Петри 190 на платформе 110 можно использовать стержни 122, 132 и 142.
Во время процесса центрирования стержни 122, 132 и 142 могут перемещаться мотором 160. Мотор 160 содержит вал (не показано), прикрепленный к ведущему шкиву 164. В рамках настоящего изобретения шкив может представлять собой конструкцию, выполненную с возможностью вращения, которую используют для передачи энергии посредством ленты, ремня, шнура, веревки, цепи и т.д., проходящих по его ободу. Например, шкив может представлять собой гладкую колесообразную конструкцию, которая выполнена с возможностью передачи энергии посредством резиновой полосы или ремня. В качестве другого примера, шкив может представлять собой похожую на шестерню конструкцию, которая выполнена с возможностью передачи энергии посредством цепи. Во время работы ведущий шкив 164 вращается в направлении по часовой стрелке или против часовой стрелки валом мотора 160. Как показано, платформа 110 может быть расположена над направляющим шкивом 112, делительным устройством 114 и направляющим шкивом 116. Делительное устройство 114 разделяет направляющий шкив 112 и направляющий шкив 116. Хотя направляющие шкивы 112 и 116 могут быть соединены через общий вал (не показано), направляющие шкивы 112 и 116 вращаются независимо друг от друга. Во время работы, когда ведущий шкив 164 вращается мотором 160, сила вращения ведущего шкива 164 передается направляющему шкиву 116 посредством ремня 184. Ремень 184 может представлять собой любую ленту, ремень, шнур, веревку, цепь и т.д., которые способны передавать силу вращения ведущего шкива 164 направляющему шкиву 116. В других вариантах осуществления направляющий шкив 116 может представлять собой отдельную конструкцию, расположенную, например, под направляющим шкивом 112. В таких вариантах осуществления делительное устройство 114 можно исключить.
Как показано, поворот направляющего шкива 116 в направлении по часовой стрелке или против часовой стрелки вызывает движение стержней 122, 132 и 142 в направлении внутрь или наружу относительно платформы 110. Как лучше всего показано на фиг. 1(a)-(d), стержни 122, 132 и 142 прикреплены к створкам 124, 134 и 144, соответственно. Створки 124, 134 и 144 соединены с валами 126, 136 и 146, соответственно, и могут вращаться вокруг них. Валы 126, 136 и 146 могут иметь фиксированные положения. Например, валы 126, 136 и 146 могут быть прикреплены к одному или более объектам (не показано). Как лучше всего показано на фиг. 1(e), створки 124, 134 и 144 могут содержать плечи 128, 138 и 148, соответственно. Кроме того, плечи 128, 138 и 148 могут содержать отверстия 129, 139 и 149, соответственно. Отверстия 129, 139 и 149 имеют размеры и расположены таким образом, чтобы стойки 102, 103 и 104, соответственно, были расположены внутри них. Как показано, стойки 102, 103 и 104 прикреплены к направляющему шкиву 116. В результате, когда направляющий шкив 116 вращается в направлении по часовой стрелке или против часовой стрелки, стойки 102, 103 и 104 также двигаются. В других вариантах осуществления направляющий шкив 116 и стойки 102, 103 и 104 могут быть образованы в виде единого встроенного объекта. Как показано, когда шкив 116 вращается мотором 160, сила вращения направляющего шкива 116 передается створкам 124, 134 и 144 через стойки 102, 103 и 104, соответственно, и плечи 128, 138 и 148, соответственно. Кроме того, когда створки 124, 134 и 144 двигаются, стержни 122, 132 и 142, соответственно, могут двигаться в направлении внутрь или наружу относительно платформы 110.
Во время процесса центрирования платформа 110 может вращаться мотором 170 в направлении по часовой стрелке или против часовой стрелки. Мотор 170 содержит вал 172, прикрепленный к ведущему шкиву 174. Во время работы ведущий шкив 174 вращается валом 172 в направлении по часовой стрелке или против часовой стрелки. Как показано, нижняя сторона платформы 110 прикреплена к верхней стороне направляющего шкива 112. В других вариантах осуществления платформа 110 и направляющий шкив 112 могут быть образованы в виде единого встроенного объекта. Кроме того, как показано, направляющий шкив 112 соединен с ведущим шкивом 174 посредством ремня 182. Во время работы, когда ведущий шкив 174 вращается мотором 170, сила вращения ведущего шкива 174 передается направляющему шкиву 112 посредством ремня 182. Кроме того, когда направляющий шкив 112 вращается в направлении по часовой стрелке или против часовой стрелки, платформа 110 также вращается в том же направлении, потому что она прикреплена к направляющему шкиву 112. Подобно ремню 184, ремень 182 также может представлять собой любую ленту, ремень, шнур, веревку, цепь и т.д., которые способны передавать силу вращения ведущего шкива 174 направляющему шкиву 112.
В некоторых вариантах осуществления после того, как чашка Петри 190 была отцентрирована, в чашку Петри 190 можно посеять биологический образец. В некоторых вариантах осуществления для посева в чашку Петри 190 можно использовать одну или более систем и/или способов, раскрытых в заявке '827. Например, для посева в чашку Петри 190 можно использовать автоматизированный пипеточный дозатор. В некоторых вариантах осуществления для ориентации чашки Петри 190 можно использовать датчик 150 (например, инфракрасный (ID) датчик или устройство визуализации). Например, в некоторых вариантах осуществления для определения, где на чашке Петри 190 начинается и заканчивается метка (например, баркод), можно использовать датчик 150. В некоторых вариантах осуществления после того, как чашка Петри 190 была отцентрирована и ориентирована, для считывания (например, сканирования) метки (например, баркода) на чашке Петри 190 можно использовать считыватель (не показано) (например, считыватель баркода или устройство визуализации). В некоторых вариантах осуществления считыватель (не показано) также можно использовать для дополнительной ориентации чашки Петри 190. В некоторых вариантах осуществления после того, как чашка Петри 190 была отцентрирована и ориентирована, можно получить одно или более изображений чашки Петри 190 с помощью устройства получения изображений (не показано), и/или одну или более колоний бактерий можно собрать с помощью робота (не показано). В некоторых вариантах осуществления для получения изображений чашки Петри 190 можно использовать одну или более систем и/или способов, раскрытых в заявке '400. В некоторых вариантах осуществления одну или более систем и/или способов, раскрытых в заявке '554, можно использовать для сбора одной или более колоний бактерий в чашке Петри 190. Например, для сбора одной или более колоний бактерий в чашке Петри 190 можно использовать автоматизированный пипеточный дозатор.
На фиг. 2(а)-(b) представлены фотографии варианта осуществления системы для центрирования круглого объекта в соответствии с настоящей технологией. Как показано, система 200 содержит платформу 210, стержень 220, стержень 230, стержень 240, крышку 250, датчик 262, считыватель 264, робот 280 и автоматизированный пипеточный дозатор 290. Крышка 250 содержит прорези 252, 254 и 256. Под крышкой 250 система 200 может содержать моторы, шкивы, ремни и/или другие компоненты, подобные системе 100 фиг. 1(а)-(е).
Как показано на фиг. 2(а)-(b), прорези 252, 254 и 256 изогнуты и имеют такой размер, чтобы диаметры прорезей 252, 254 и 256 соответствовали диаметрам стержней 210, 220 и 230. В результате стержни 220, 230 и 240 могут проходить приблизительно всю длину прорезей 252, 254 и 256. Кроме того, в этом варианте осуществления прорези 252, 254 и 256 продолжаются 15 миллиметров от платформы 210. Однако в других вариантах осуществления длину прорезей 252, 254 и 256 можно увеличить или уменьшить. Например, длины прорезей 252, 254 и 256 можно выбрать так, чтобы обеспечить размещение чашки Петри на платформе 210 и поворот без существенных помех со стороны стержней 220, 230 и 240. В качестве другого примера, длины прорезей 252, 254 и 256 могут значительно превышать (например, в два или более раз) длину, требуемую, чтобы обеспечить размещение чашки Петри на платформе 210 и поворот без существенных помех со стороны стержней 220, 230 и 240.
Во время операции центрирования прорези 252, 254 и 256 направляют стержни 210, 220 и 230, когда они продвигаются в сторону платформы 210. Как показано, прорези 252, 254 и 256 изогнуты и имеют согласованный диаметр, соответствующий диаметрам стержней 210, 220 и 230. В других вариантах осуществления прорези 252, 254 и 256 могут иметь разные формы. Например, прорези 252, 254 и 256 могут быть в общем прямыми и иметь согласованный диаметр, соответствующий диаметрам стержней 210, 220 и 230. В качестве другого примера, прорези 252, 254 и 256 могут иметь конические формы с изменяющимися диаметрами. В таких вариантах осуществления прорези 252, 254 и 256 могут иметь узкие части около платформы 210 с диаметрами, соответствующими диаметрам стержней 210, 220 и 230.
Как показано на фиг. 2(b), чашку Петри 270 можно разместить на платформе 210 с помощью робота 280. Размещенные на платформе 210 стержни 220, 230 и 240 можно использовать для центрирования чашки Петри 270 на платформе 210. После того, как чашка Петри 270 была отцентрирована, датчик 262 также можно использовать для ориентации чашки Петри 270. После того, как чашка Петри 270 была отцентрирована и ориентирована, для считывания метки на чашке Петри 270 можно использовать считыватель 264. Считыватель 264 также можно использовать для дополнительной ориентации чашки Петри 270. После того, как чашка Петри 270 была отцентрирована и/или ориентирована, для посева в чашку Петри 270 биологического образца и/или сбора одной или более колоний бактерий в чашке Петри 270 можно использовать автоматизированный пипеточный дозатор 290.
На фиг. 3 представлена блок-диаграмма способа центрирования круглого объекта в соответствии с настоящей технологией. Способ 300 можно выполнять с помощью системы, такой как система 100 фиг. 1(а)-(е) или система 200 фиг. 2(а)-(b). В таких вариантах осуществления система 100 может содержать один или более процессоров, выполненных с возможностью управления датчиком 150, мотором 160 и мотором 170. Аналогично, в таких вариантах осуществления система 200 может содержать один или более процессоров, выполненных с возможностью управления датчиком 262, считывателем 264 и/или одним или более моторами под крышкой 250, которые выполнены с возможностью перемещения платформы 210 и стержней 220, 230 и 240. Следует понимать, что стрелки на фиг. 3 предназначены для иллюстрации одного возможного порядка, в котором можно выполнять разные процессы способа 300. Однако в некоторых вариантах осуществления можно изменить порядок блоков, проиллюстрированных на фиг. 3. Кроме того, в некоторых вариантах осуществления можно добавить и/или удалить один или более блоков.
В блоке 310 систему, содержащую платформу, выполненную с возможностью вращения, окруженную тремя подвижными стержнями, инициируют путем перемещения стержней от платформы в открытое положение. Например, в варианте осуществления, выполняемом системой 200, стержни 220, 230 и 240 могут перемещаться в открытое положение, показанное на фиг. 2(а)-(b). Как показано, стержни 220, 230 и 240 перемещают на 15 миллиметров от платформы 210. В качестве другого примера, в варианте осуществления, выполняемом системой 200, стержни 220, 230 и 240 могут перемещаться в открытое положение, которое составляет только 8 миллиметров от платформы 210. В некоторых вариантах осуществления один или более процессоров могут управлять движением стержней за счет управления одним или более моторами, соединенными со стержнями.
В блоке 320 чашку Петри размещают на платформе. Например, в варианте осуществления, выполняемом системой 200, робот 280 может размещать чашку Петри 270 на платформе 210. В качестве другого примера, в некоторых вариантах осуществления чашку Петри можно транспортировать на платформу за счет использования конвейерной системы. В некоторых вариантах осуществления один или более процессоров могут управлять механизмом перемещения (например, роботом или конвейерной системой), используемым для размещения чашки Петри на платформе. Поскольку механизм перемещения может не быть выполнен с возможностью точного центрирования чашки Петри на платформе, чашка Петри сначала может быть не отцентрирована.
В блоке 330 чашку Петри грубо центрируют за счет перемещения всех стержней в сторону чашки Петри в закрытое положение. Как объяснено выше, некоторые системы предшествующего уровня техники используют аналогичную технологию для центрирования круглых объектов, таких как чашки Петри. Однако в отличие от этих систем предшествующего уровня техники способ 300 включает дополнительные процессы для более точного центрирования круглых объектов, таких как чашки Петри, в системах, описанных в настоящем документе.
В блоке 340 удаляют крышку, закрывающую чашку Петри. В других вариантах осуществления этот блок можно выполнять в разных местах в проиллюстрированной последовательности, например, перед блоком 310. В других вариантах осуществления этот блок может быть ненужным и полностью удален из способа 300. Например, в некоторых вариантах осуществления система может манипулировать одной или более чашками Петри, которые не имеют крышек, или система может иметь возможность получения изображения через прозрачную крышку, причем в этом случае нет необходимости удалять крышку.
В блоке 350 все стержни перемещают от чашки Петри в открытое положение. Например, в варианте осуществления, выполняемом системой 200, стержни 220, 230 и 240 могут перемещаться в положение, показанное на фиг. 2(а)-(b). Как показано, стержни перемещены в их первоначальное открытое положение, но это не требуется. В качестве другого примера в некоторых вариантах осуществления стержни можно перемещать только достаточно далеко, чтобы обеспечить поворот чашки Петри без существенных помех. Например, в варианте осуществления, выполняемом системой 200, стержни 220, 230 и 240 могут перемещаться в открытое положение, которое составляет только 8 миллиметров от платформы 210, вместо открытого положения, которое составляет 15 миллиметров от платформы 210, как показано на фиг. 2(а)-(b).
В блоке 360 чашку Петри вращают в направлении по часовой стрелке или против часовой стрелки на 60 градусов. Например, в варианте осуществления, выполняемом системой 200, платформу 210 можно вращать в направлении по часовой стрелке или против часовой стрелки на 60 градусов, чтобы повернуть чашку Петри 270 на 60 градусов в том же направлении. В некоторых вариантах осуществления один или более процессоров могут управлять движением платформы за счет управления одним или более моторами, соединенными со стержнями. Несмотря на меньшую эффективность по времени специалисту в данной области легко поймет, что аналогичный результат может быть достигнут за счет добавления одного или более полных оборотов по 360 градусов. Например, чашку Петри можно эффективно вращать в направлении по часовой стрелке или против часовой стрелки на 60 градусов за счет поворота чашки Петри на 420 градусов в направлении по часовой стрелке или против часовой стрелки.
В блоке 370 чашку Петри точно центрируют за счет перемещения всех стержней в сторону чашки Петри. Как описано более подробно ниже в отношении фиг. 4(а)-(1), в блоке 330 по меньшей мере два из трех стержней должны контактировать с чашкой Петри. Вследствие этого, край чашки Петри, который находится дальше всего от центра платформы, расположен между двумя контактирующими стержнями. В результате за счет поворота чашки Петри один из стержней, который контактирует с чашкой Петри в блоке 330, можно использовать в блоке 370 для более точного направления чашки Петри в центр платформы.
В блоке 380 все стержни перемещают от чашки Петри. Этот блок является необязательным. В некоторых вариантах осуществления может быть предпочтительным движение стержней от чашки Петри перед выполнением одного или более дополнительных процессов с чашкой Петри. Например, если чашку Петри нужно снова повернуть, чтобы правильно сориентировать, может быть предпочтительным движение стержней от чашки Петри перед ее поворотом. В других вариантах осуществления может быть более предпочтительным удерживать стержни в положении, которое ближе к чашке Петри и платформе, чтобы предотвратить продвижение чашки Петри и ее расположение не в центре.
В блоке 390 один или более процессов выполняют с точно отцентрированной чашкой Петри. Например, в блоке 390 в чашку Петри можно посеять биологический образец. В некоторых вариантах осуществления для посева в чашку Петри можно использовать одну или более систем и/или способов, раскрытых в заявке '827. В качестве другого примера, в блоке 390 одно или более изображений чашки Петри можно получить с помощью устройства получения изображений. В некоторых вариантах осуществления для получения изображений чашки Петри можно использовать одну или более систем и/или способов, раскрытых в заявке '400. В качестве еще одного примера, в блоке 390 одну или более колоний бактерий в чашке Петри можно собрать с помощью робота. В некоторых вариантах осуществления для сбора одной или более колоний бактерий в чашке Петри 190 можно использовать одну или более систем и/или способов, раскрытых в заявке '554.
На фиг. 4(а)-(l) представлен способ центрирования круглого объекта в соответствии с настоящей технологией. Более конкретно, со ссылкой на способ 300 фиг. 3 процессы, проиллюстрированные на фиг. 4(a)-(d), соответствуют блоку 330, процессы, проиллюстрированные на фиг. 4(e), соответствуют блоку 350, процессы, проиллюстрированные на фиг. 4(f)-(g), соответствуют блоку 360, процессы, проиллюстрированные на фиг. 4(h)-(j), соответствуют блоку 370, а процессы, проиллюстрированные на фиг. 4(k)-(l), соответствуют блоку 380. Как показано, на фиг. 4(a)-(l) представлена чашка Петри 410, расположенная между подвижными стержнями 420, 430 и 440. Как показано на фиг. 4(a), стержни 420, 430 и 440 находятся в открытом положении.
На фиг. 4(b)-(d) стержни 420, 430 и 440 перемещают в сторону чашки Петри 410 в закрытое положение. Как показано на фиг. 4(c), во время этого процесса стержень 440 контактирует с чашкой Петри 410 раньше других стержней. Кроме того, как показано на фиг. 4(d), стержень 420 в конечном итоге контактирует с чашкой Петри 410, но стержень 430 не контактирует с чашкой Петри 410, потому что он достиг предела своей траектории движения через свою соответствующую прорезь (не показано) до контакта с чашкой Петри 410. В результате чашка Петри 410 на фиг. 4(d) не точно отцентрирована. Более конкретно, край чашки Петри, который находится дальше всего от центра стержней 420, 430 и 440, расположен между стержнями 440 и 420. Кроме того, край чашки Петри, который находится ближе всего к центру стержней 420, 430 и 440, локализован стержнем 430.
Чтобы более точно отцентрировать чашку Петри 410, на фиг. 4(e) стержни 420, 430 и 440 перемещают от чашки Петри 410 в открытое положение. Затем, на фиг. 4(f)-(g), чашку Петри 410 вращают на 60 градусов в направлении по часовой стрелке. В результате край чашки Петри, который находится дальше всего от центра стержней 420, 430 и 440, теперь локализован стержнем 420. На фиг. 4(h)-(j) стержни 420, 430 и 440 снова перемещают в сторону чашки Петри 410 в закрытое положение. Как показано на фиг. 4(i), во время этого процесса стержень 420 контактирует с чашкой Петри 410 раньше других стержней. В результате стержень 420 может толкать чашку Петри 410 в положение, более точно отцентрированное между всеми стержнями. Наконец, на фиг. 4(k)-(1) стержни 420, 430 и 440 снова перемещают от чашки Петри 410 в открытое положение.
На фиг. 5 представлена фотография простого эксперимента, проводимого системой фиг. 2(а)-(b), чтобы продемонстрировать некоторые преимущества настоящей технологии. Как показано, часть двухсторонней ленты 510 обернули вокруг чашки Петри 270. Кроме того, во время получения изображения чашка Петри 270 была только размещена на платформе 210 (см., например, блок 320 фиг. 3), и стержни 220, 230 и 240 были перемещены в сторону чашки Петри только один раз (см., например, блок 330 фиг. 3). Как можно видеть, в этот момент времени между стержнем 220 и чашкой Петри 270 имеется существенный зазор, который указывает, что чашка Петри 270 не было точно отцентрирована.
Как упоминалось выше, некоторые системы предшествующего уровня техники для центрирования чашки Петри содержат три или более стержней. Во время работы стержни перемещают в сторону чашки Петри до зажимания чашки Петри между всеми стержнями. Однако без дополнительных мер системы этих типов предшествующего уровня техники могут не точно центрировать чашки Петри из-за трения дна или боковых сторон чашки Петри или стержней, хотя чашки Петри часто имеют гладкие поверхности с низким трением могут возникать разные ситуации, которые это меняют. Например, часть агара в чашке Петри может разлиться и сделать стороны чашки Петри липкими. В качестве другого примера метка, напечатанная на чашке Петри, может начать отслаиваться, и может открыться часть клея на обратной стороне этой метки. В качестве еще одного примера метка может быть напечатана на чашке Петри неровно. В результате, как показано на фиг.5, есть вероятность того, что стержни могут прекратить перемещение, когда только некоторые (не все) стержни касаются чашки Петри. Варианты осуществления настоящей технологии снижают эти риски.
Кроме того, некоторые преимущества настоящей технологии по сравнению с предшествующим уровнем техники можно реализовать несмотря на некоторые неточности. Например, в блоке 360 фиг. 3 чашка Петри вращается на 60 градусов в направлении по часовой стрелке или против часовой стрелки. Однако, что касается положения чашки Петри после выполнения блока 330, чашку Петри можно более точно отцентрировать, даже если ее повернуть только, например, на 55 градусов в направлении по часовой стрелке или против часовой стрелки. Аналогично, что касается положения чашки Петри после выполнения блока 330 чашку Петри можно более точно отцентрировать, даже если ее повернуть, например, на 65 градусов в направлении по часовой стрелке или против часовой стрелки. Вследствие этого, в рамках настоящего изобретения «приблизительно на 60 градусов» равносильно «60 градусов плюс или минус пять градусов». Таким образом, «приблизительно 60 градусов» равносильно, например, 55 градусов, 56,7 градусов, 57,1 градусов, 59,021 градусов, 61,78 градусов, 62,35 градусов и 64,99 градусов.
Из вышеизложенного и со ссылкой на разные фигуры специалисту в данной области будет ясно, что также можно сделать некоторые модификации настоящего раскрытия без отклонения от его сути. Например, для поворота круглого объекта можно использовать разные механизмы. Например, в некоторых вариантах осуществления круглый объект, такой как чашка Петри, можно разместить на неподвижной платформе между множеством стержней. В таких вариантах осуществления робот, расположенный над круглым объектом, может захватывать чашку Петри и вращать ее.
В качестве другого примера настоящую технологию можно легко адаптировать к системам с четырьмя или более стержнями. Например, система может содержать платформу, выполненную с возможностью вращения, окруженную четырьмя подвижными стержнями. Такую систему можно использовать в способе 300 фиг. 3, если в блоке 360 чашку Петри повернуть только приблизительно на 45 градусов в направлении по часовой стрелке или против часовой стрелки, фактически, величину поворота, выполняемого в блоке 360, в общем можно выразить:
где 6 представляет собой величину, на которую вращают чашку Петри, а Р представляет собой количество стержней, окружающих чашку Петри. Кроме того, специалист в данной области легко поймет, что к 8 можно добавить один или более полных оборотов по 360 градусов. Как и в предыдущем варианте осуществления «приблизительно 45 градусов» равносильно «45 градусов плюс или минус пять градусов».
Кроме того, хотя на фигурах было показано несколько вариантов осуществления раскрытия, не предполагается ограничение ими раскрытия, так как предполагается, что объем раскрытия будет настолько широким, насколько это допускает уровень техники, и что описание следует читать аналогичным образом. Вследствие этого, приведенное выше описание не следует истолковывать как ограничение, но просто как иллюстрации конкретных вариантов осуществления. Специалистам в данной области будут очевидны другие модификации в пределах объема и сущности приложенной формулы изобретения.
Группа изобретений относится к способам и системе центрирования круглого объекта, такого как чашка Петри, между множеством стержней. В одном варианте осуществления способ включает размещение круглого объекта на платформе, выполненной с возможностью вращения, окруженной тремя подвижными стержнями. Для грубого центрирования круглого объекта способ дополнительно включает перемещение в первый раз всех стержней по направлению к круглому объекту до тех пор, пока по меньшей мере два из трех стержней не коснутся круглого объекта. Для более точного центрирования круглого объекта способ дополнительно включает: перемещение всех стержней от круглого объекта, чтобы он мог вращаться без существенных помех; поворот платформы на 60 градусов, причем поворот платформы также вызывает поворот круглого объекта на 60 градусов; и перемещение во второй раз всех стержней по направлению к круглому объекту. Группа изобретений обеспечивает повышение точности центрирования круглых объектов, таких как чашки Петри. 3 н. и 17 з.п. ф-лы, 21 ил.
1. Способ центрирования круглого объекта, включающий:
размещение круглого объекта на платформе между тремя или более стержнями, причем стержни расположены на одинаковом расстоянии друг от друга, и при этом стержни находятся в первом открытом положении;
перемещение в первый раз всех стержней по направлению к круглому объекту в закрытое положение, причем по меньшей мере два стержня находятся в контакте с круглым объектом, когда стержни находятся в закрытом положении;
перемещение всех стержней от круглого объекта в первое открытое положение или второе открытое положение, причем круглый объект может вращаться на платформе без помех со стороны стержней, когда стержни находятся в первом открытом положении или втором открытом положении;
поворот круглого объекта на θ градусов или на θ градусов плюс один или более полных оборотов по 360 градусов, причем θ составляет 360 градусов, деленных на удвоенное количество стержней; и
перемещение во второй раз всех стержней по направлению к круглому объекту в закрытое положение, причем круглый объект находится в центре между всеми стержнями после перемещения всех стержней в закрытое положение во второй раз;
причем круглый объект необязательно представляет собой чашку Петри.
2. Способ по п. 1, в котором платформа выполнена с возможностью вращения, и при этом круглый объект вращается за счет поворота платформы.
3. Способ по п. 1, в котором круглым объектом является чашка Петри.
4. Способ по п. 3, дополнительно включающий:
посев в чашку Петри биологического образца после центрирования чашки Петри между всеми стержнями.
5. Способ по п. 3, дополнительно включающий:
получение изображения чашки Петри с помощью модуля получения изображений после центрирования чашки Петри между всеми стержнями.
6. Способ по п. 3, дополнительно включающий:
сбор одной или более колоний бактерий в чашке Петри после центрирования чашки Петри между всеми стержнями.
7. Способ центрирования круглого объекта, включающий:
размещение круглого объекта на платформе, выполненной с возможностью вращения, расположенной между тремя стержнями, причем стержни расположены на одинаковом расстоянии друг от друга, и при этом стержни находятся в первом открытом положении;
перемещение в первый раз всех стержней по направлению к круглому объекту в закрытое положение, причем по меньшей мере два стержня находятся в контакте с круглым объектом, когда стержни находятся в закрытом положении;
перемещение в первый раз всех стержней от круглого объекта в первое открытое положение или второе открытое положение, причем круглый объект может вращаться на платформе без помех со стороны стержней, когда стержни находятся в первом открытом положении или втором открытом положении;
поворот платформы на 60 градусов или на 60 градусов плюс один или более полных оборотов по 360 градусов, причем поворот платформы также вызывает поворот круглого объекта; и
перемещение во второй раз всех стержней по направлению к круглому объекту в закрытое положение, причем круглый объект находится в центре между всеми стержнями после перемещения всех стержней в закрытое положение во второй раз.
8. Способ по п. 7, в котором круглым объектом является чашка Петри.
9. Способ по п. 8, дополнительно включающий:
удаление крышки, закрывающей чашку Петри, с чашки Петри.
10. Способ по п. 9, дополнительно включающий:
посев в чашку Петри биологического образца после центрирования чашки Петри между всеми стержнями.
11. Способ по п. 9, дополнительно включающий:
перемещение во второй раз всех стержней от круглого объекта в первое открытое положение или второе открытое положение после центрирования чашки Петри между всеми стержнями; и
ориентирование чашки Петри за счет поворота чашки Петри и выравнивания метки на чашке Петри со считывателем, расположенным около платформы.
12. Способ по п. 11, дополнительно включающий:
получение изображения чашки Петри с помощью модуля получения изображений после центрирования чашки Петри между всеми стержнями и ориентирования.
13. Способ по п. 11, дополнительно включающий:
сбор одной или более колоний бактерий в чашке Петри после центрирования чашки Петри между всеми стержнями и ориентирования.
14. Система центрирования круглого объекта, содержащая:
платформу, выполненную с возможностью вращения, имеющую верхнюю поверхность и нижнюю поверхность;
первый направляющий шкив, имеющий верхнюю поверхность и нижнюю поверхность, причем верхняя поверхность первого направляющего шкива прикреплена к нижней поверхности платформы;
второй направляющий шкив, имеющий верхнюю поверхность и нижнюю поверхность, причем второй направляющий шкив расположен под дном первого направляющего шкива, и при этом к дну второго направляющего шкива прикреплены три стойки; и
три стержня, расположенных вокруг платформы, выполненной с возможностью вращения, причем стержни расположены на одинаковом расстоянии друг от друга, и при этом каждый из стержней прикреплен к створке, имеющей плечо, которое проходит под вторым направляющим шкивом, и при этом каждая из створок соединена с неподвижным валом и выполнена с возможностью вращения вокруг этого неподвижного вала, и при этом каждое плечо створок имеет отверстие, окружающее другую из стоек, прикрепленных к дну второго направляющего шкива,
причем платформа может вращаться за счет вращения первого направляющего шкива, и при этом стержни могут перемещаться к платформе за счет вращения второго направляющего шкива.
15. Система по п. 14, дополнительно содержащая:
первый мотор, имеющий первый ведущий шкив, прикрепленный к валу первого мотора;
второй мотор, имеющий второй ведущий шкив, прикрепленный к валу второго мотора;
первый ремень, соединенный с первым направляющим шкивом и первым ведущим шкивом; и
второй ремень, соединенный со вторым направляющим шкивом и вторым ведущим шкивом,
причем сила вращения первого ведущего шкива передается первому направляющему шкиву через первый ремень, и при этом сила вращения второго ведущего шкива передается второму направляющему шкиву через второй ремень.
16. Система по п. 15, дополнительно содержащая:
один или более процессоров, выполненных с возможностью управления поворотом первого и второго направляющего шкивов за счет управления первым и вторым моторами.
17. Система по п. 16, в которой один или более процессоров выполнены с возможностью:
перемещения в первый раз всех стержней в сторону чашки Петри, размещенной на платформе, в закрытое положение, причем по меньшей мере два стержня находятся в контакте с чашкой Петри, когда стержни находятся в закрытом положении;
перемещения в первый раз всех стержней от чашки Петри в первое открытое положение или второе открытое положение, причем чашка Петри может вращаться на платформе без помех со стороны стержней, когда стержни находятся в первом открытом положении или втором открытом положении;
поворота платформы на 60 градусов или на 60 градусов плюс один или более полных оборотов по 360 градусов; и
перемещения во второй раз всех стержней в сторону чашки Петри в закрытое положение, причем чашка Петри находится в центре между всеми стержнями после перемещения всех стержней в закрытое положение во второй раз.
18. Система по п. 17, дополнительно содержащая:
считыватель; и
при этом один или более процессоров дополнительно выполнены с возможностью:
перемещения во второй раз всех стержней от чашки Петри в первое открытое положение или второе открытое положение после центрирования чашки Петри между всеми стержнями; и
ориентации чашки Петри за счет поворота платформы и выравнивания метки на чашке Петри со считывателем.
19. Система по п. 18, дополнительно содержащая:
модуль получения изображений; и
при этом один или более процессоров дополнительно выполнены с возможностью:
получения изображения чашки Петри с помощью модуля получения изображений после центрирования чашки Петри между всеми стержнями и ориентирования.
20. Система по п. 18, дополнительно содержащая:
автоматизированный пипеточный дозатор; и
при этом один или более процессоров дополнительно выполнены с возможностью:
сбора одной или более колоний бактерий в чашке Петри после центрирования чашки Петри между всеми стержнями и ориентирования.
| EP 3228691 A1, 11.10.2017 | |||
| US 7105338 B1, 12.09.2006 | |||
| US 2015010996 A1, 08.01.2015 | |||
| US 2014377038 A1, 25.12.2014 | |||
| Активный протез руки для культей предплечья | 1955 |
|
SU114529A1 |

