Область техники
Настоящее изобретение относится к области парков развлечений. В частности, варианты осуществления настоящего изобретения относятся к способам и оборудованию, применяемому в связи с играми или аттракционами для катания в развлекательных парках.
Уровень техники
Различные формы развлекательных аттракционов для катания (далее, аттракционов) много лет использовались в парках развлечений и тематических парках отдыха. Данные аттракционы включают в себя традиционные аттракционы, например, американские горки и/или аттракционы для катания вдоль направляющих. Многие аттракционы могут включать в себя одну или более петель направляющих, по которым могут перемещаться транспортные средства для катания (далее, транспортные средства). В частности, развлекательный аттракцион может включать в себя соседние или рядом расположенные направляющей петли (например, аттракционную петлю и вспомогательную или служебную петлю), при этом может быть желательно переводить транспортные средства между направляющими соседних петель. В настоящее время выяснилось, что традиционные системы и способы для перевода транспортных средств между соседними направляющими могут неправильно ориентировать транспортные средства и/или могут использовать неэффективные трудоемкие способы.
Сущность изобретения
Некоторые варианты осуществления, соответствующие первоначально заявленному объекту изобретения по объему, приведены ниже. Данные варианты осуществления не предназначены для ограничения объема изобретения, а скорее данные варианты осуществления предназначены только для обеспечения краткого изложения некоторых раскрытых вариантов осуществления. На самом деле, настоящее раскрытие может охватывать множество форм, которые могут быть подобны или отличаться от вариантов осуществления, изложенных ниже.
В соответствии с одним вариантом осуществления, система включает в себя двойную направляющую петлю, включающую в себя первую направляющую петлю и вторую направляющую петлю, одинарную направляющую петлю, отстоящую от двойной направляющей петли, и перекрестную направляющую, проходящую между двойной направляющей петлей и одинарной направляющей петлей. Система также включает в себя платформу, расположенную на перекрестной направляющей. Платформа выполнена с возможностью поступательного перемещения между положением, выровненным с первой направляющей петлей и второй направляющей петлей двойной направляющей петли, и положением, выровненным с первым участком и вторым участком одинарной направляющей петли. Система дополнительно включает в себя поворотный стол, соединенный с платформой и выполненный с возможностью поворота транспортного средства, расположенного на поворотном столе, и изменения ориентации транспортного средства относительно неподвижного участка платформы.
В другом варианте осуществления, система включает в себя платформу. Платформа включает в себя стационарный участок и поворотный участок. Система также включает в себя сегмент направляющей, соединенный с поворотным участком, который выполнен с возможностью поворота относительно стационарного участка, чтобы обеспечивать поворот сегмента направляющей. Система дополнительно включает в себя электродвигатель, соединенный с поворотным участком и выполненный с возможностью поворота поворотного участка, и направляющий рельс, соединенный с платформой таким образом, что стационарный участок и поворотный участок платформы выполнены с возможностью поступательного перемещения вдоль направляющего рельса.
В другом варианте осуществления, способ включает в себя этап приема, на первый сегмент направляющей платформы, первого транспортного средства с первой направляющей, этап приема, на второй сегмент направляющей платформы, второго транспортного средства со второй направляющей, и этап поступательного перемещения платформы, чтобы переместить первое транспортное средство с первой направляющей для выравнивания первого сегмента направляющей с первым участком третьей направляющей петли, и чтобы переместить второе транспортное средство со второй направляющей для выравнивания второго сегмента направляющей со вторым участком третьей направляющей петли. Способ также включает в себя этап поворота, посредством поворотного стола, второго транспортного средства, этап отправления первого транспортного средства с платформы на третью направляющую петлю и этап отправления второго транспортного средства с платформы на третью направляющую петлю.
Таким образом, согласно первому объекту настоящего изобретения создана система аттракциона для катания, содержащая:
двойную направляющую петлю, содержащую первую направляющую петлю и вторую направляющую петлю;
одинарную направляющую петлю, отстоящую от двойной направляющей петли;
перекрестную направляющую, проходящую между двойной направляющей петлей и одинарной направляющей петлей;
платформу, расположенную на перекрестной направляющей, при этом платформа выполнена с возможностью поступательного перемещения между положением, выровненным с первой направляющей петлей и второй направляющей петлей двойной направляющей петли, и положением, выровненным с первым участком и вторым участком одинарной направляющей петли; и
поворотный стол, соединенный с платформой и выполненный с возможностью поворота первого транспортного средства для катания, расположенного на поворотном столе, и изменения ориентации первого транспортного средства для катания относительно второго транспортного средства на неподвижном участке платформы.
Предпочтительно, первое расстояние, разделяющее первую направляющую петлю и вторую направляющую петлю вблизи перекрестной направляющей, приблизительно равно второму расстоянию, разделяющему первый участок и второй участок одинарной направляющей петли вблизи перекрестной направляющей.
Предпочтительно, система содержит электродвигатель, выполненный с возможностью поворота первого транспортного средства для катания посредством поворотного стола.
Предпочтительно, платформа выполнена с возможностью приема первого транспортного средства для катания с первой направляющей петли и второго транспортного средства для катания со второй направляющей петли в то время, когда платформа находится в первичном положении, причем одинарная направляющая петля выполнена с возможностью приема первого транспортного средства для катания и второго транспортного средства для катания с платформы в то время, когда платформа находится во вторичном положении.
Предпочтительно, платформа выполнена с возможностью приема первого транспортного средства для катания в то время, когда первое транспортное средство для катания ориентировано в первом направлении относительно платформы, при этом одинарная направляющая петля выполнена с возможностью приема первого транспортного средства для катания в то время, когда первое транспортное средство для катания ориентировано во втором направлении относительно платформы, причем первое направление по существу противоположно второму направлению.
Предпочтительно, платформа содержит первый сегмент направляющей, второй сегмент направляющей, третий сегмент направляющей и четвертый сегмент направляющей, причем четвертый сегмент направляющей соединен с поворотным столом платформы.
Предпочтительно, третий сегмент направляющей по существу коллинеарен с первой направляющей петлей, а четвертый сегмент направляющей по существу коллинеарен со второй направляющей петлей в то время, когда платформа находится в первичном положении.
Предпочтительно, первый сегмент направляющей по существу коллинеарен с первой направляющей петлей, второй сегмент направляющей по существу коллинеарен со второй направляющей петлей, третий сегмент направляющей пути по существу коллинеарен с первым участком одинарной направляющей петлей, а четвертый сегмент направляющей по существу коллинеарен со вторым участком одинарной направляющей петли в то время, когда платформа находится во вторичном положении.
Предпочтительно, система содержит:
систему определения транспортных средств, выполненную с возможностью определения местоположения первого транспортного средства для катания;
систему определения платформы, выполненную с возможностью определения положения платформы; и
контроллер, выполненный с возможностью координации работы платформы по данным, принятым из системы определения транспортных средств, указывающих местоположение первого транспортного средства для катания, и по данным, принятым из системы определения платформы, указывающим положение платформы.
Согласно второму объекту настоящего изобретения создана система аттракциона для катания, содержащая:
платформу, содержащую стационарный участок и поворотный участок;
сегмент направляющей, соединенный с поворотным участком, причем поворотный участок выполнен с возможностью поворота относительно стационарного участка для обеспечения поворота сегмента направляющей;
первый электродвигатель, соединенный с поворотным участком и выполненный с возможностью поворота поворотного участка;
направляющий рельс, соединенный с платформой таким образом, что стационарный участок и поворотный участок платформы выполнены с возможностью поступательного перемещения вдоль направляющего рельса; и
второй электродвигатель, соединенный с платформой и выполненный с возможностью поступательного перемещения платформы вдоль направляющего рельса.
Предпочтительно, сегмент направляющей является первым сегментом направляющей, причем дополнительно имеется второй сегмент направляющей, третий сегмент направляющей и четвертый сегмент направляющей, соединенные со стационарным участком, при этом поворот поворотного участок обеспечивает изменение ориентации первого сегмента направляющей относительно второго сегмента направляющей, третьего сегмента направляющей и четвертого сегмента направляющей.
Предпочтительно, система содержит одну или более систем определения транспортных средств, выполненных с возможностью определения одного или более транспортных средств для катания, поступающих на платформу и/или сходящих с нее.
Предпочтительно, система содержит систему определения платформы, выполненную с возможностью определения местоположения платформы вдоль направляющего рельса.
Предпочтительно, платформа выполнена с возможностью поступательного перемещения по сигналу от контроллера о том, что транспортное средство, расположенное на платформе, подлежит плановому техническому обслуживанию.
Согласно третьему объекту настоящего изобретения создан способ эксплуатации аттракциона для катания, при котором:
принимают на первый сегмент направляющей платформы первое транспортное средство для катания от первой направляющей, причем платформа содержит стационарный участок и поворотный участок;
принимают на второй сегмент направляющей платформы второе транспортное средство для катания от второй направляющей;
поступательно перемещают стационарный участок и поворотный участок платформы вдоль направляющей с использованием первого электродвигателя, чтобы переместить первое транспортное средство для катания от первой направляющей для выравнивания первого сегмента направляющей с первым участком третьей направляющей петли, и чтобы переместить второе транспортное средство для катания от второй направляющей для выравнивания второго сегмента направляющей со вторым участком третьей направляющей петли;
поворачивают поворотный участок платформы с использованием второго электродвигателя для поворота второго транспортного средства для катания;
отправляют первое транспортное средство для катания с платформы на третью направляющую петлю; и
отправляют второе транспортное средство для катания с платформы на третью направляющую петлю.
Предпочтительно, определяют, посредством контроллера, местоположение платформы.
Предпочтительно, определяют посредством контроллера то, что платформа принимает первое транспортное средство для катания или второе транспортное средство для катания, на основе первого сигнала от датчика определения транспортного средства; и определяют посредством контроллера то, что платформа отправляет первое транспортное средство для катания или второе транспортное средство для катания, на основе второго сигнала от датчика определения транспортного средства.
Предпочтительно, поступательно перемещают платформу по сигналу на техническое обслуживание, относящемуся к, по меньшей мере, первому транспортному средству для катания или второму транспортному средству для катания.
Предпочтительно, поступательное перемещение платформы и поворот платформы осуществляют одновременно.
Краткое описание чертежей
Приведенные и другие признаки, аспекты и преимущества настоящего изобретения станут более понятными, когда нижеследующее подробное описание будет изучено со ссылками на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены идентичные части и на которых:
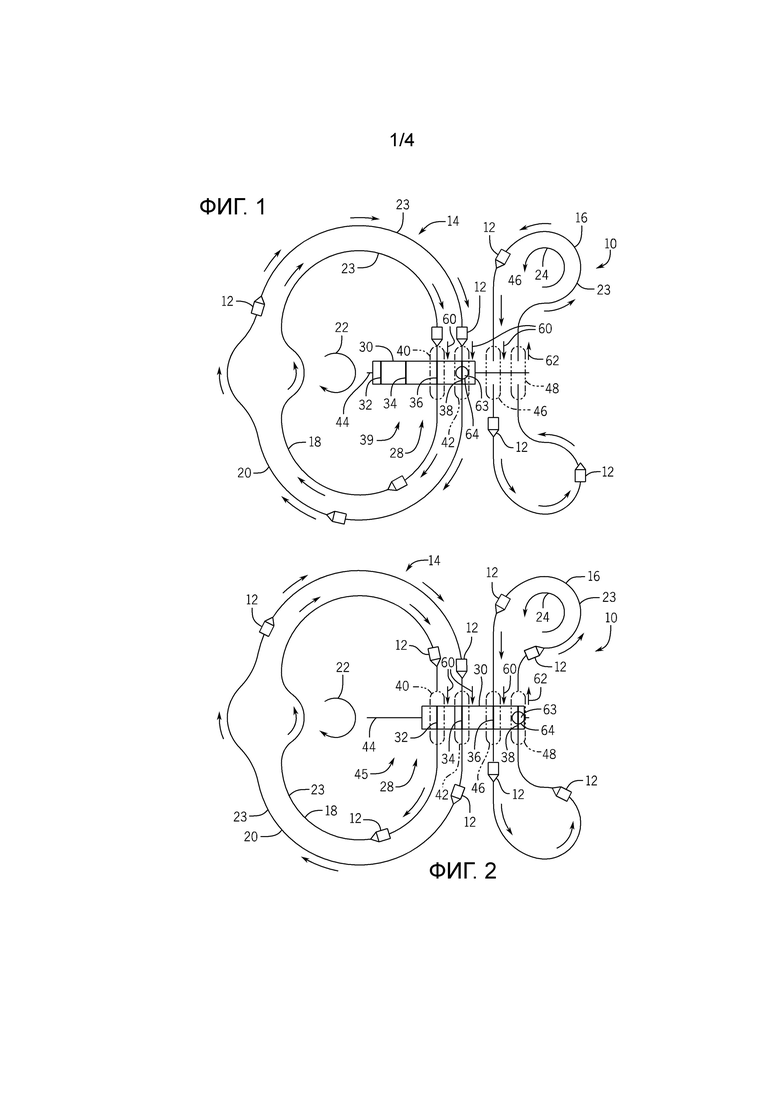
Фиг. 1 - схема варианта осуществления системы аттракциона, которая может использовать платформу для перевода транспортных средств, в соответствии с настоящими способами;
Фиг. 2 - схема варианта осуществления системы аттракциона, показанной на фиг. 1, которая может использовать платформу для перевода транспортных средств, в соответствии с настоящими способами;
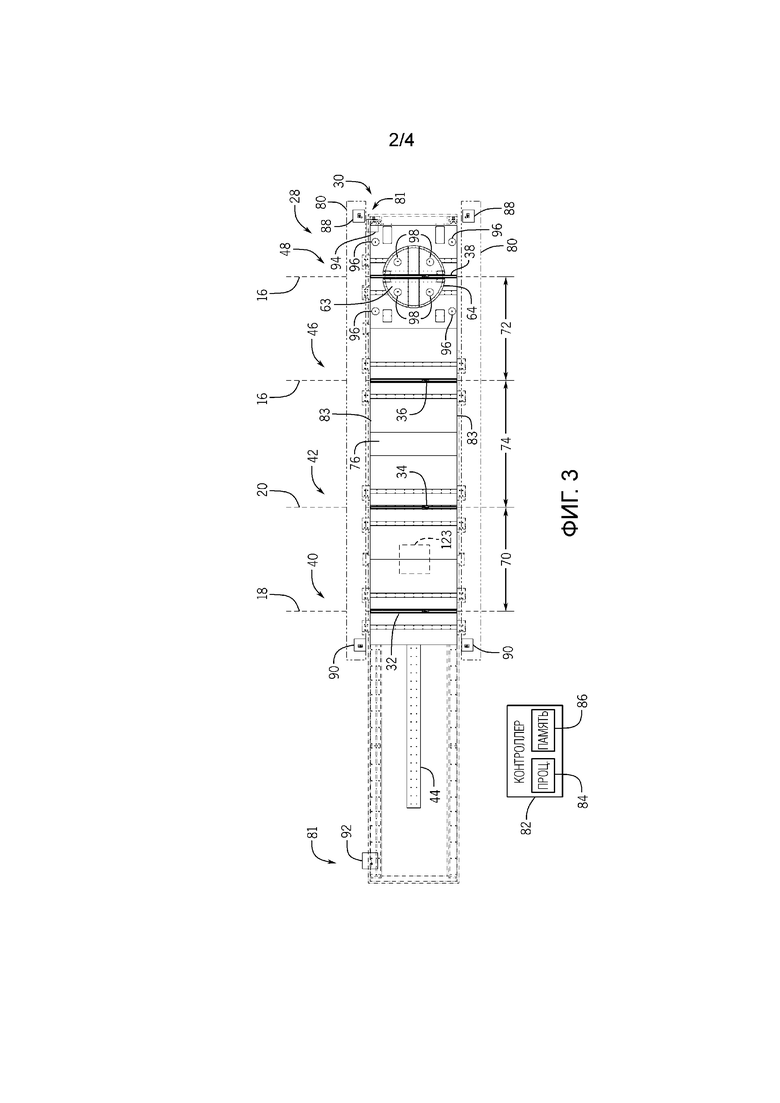
Фиг. 3 - вид сверху варианта осуществления платформы, показанной на фиг. 1, в соответствии с настоящими способами;
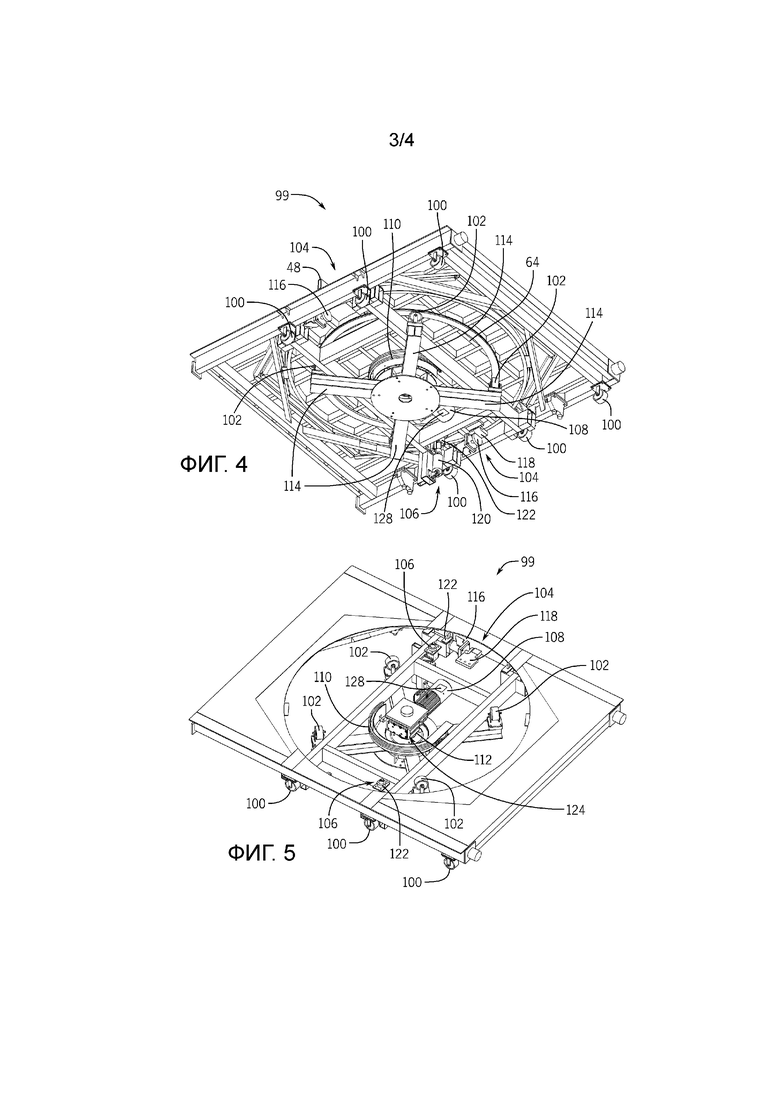
Фиг. 4 - вид снизу в перспективе варианта осуществления участка платформы, показанной на фиг. 1, в соответствии с настоящими способами;
Фиг. 5 - вид сверху в перспективе варианта осуществления участка платформы, показанной на фиг. 1, в соответствии с настоящими способами;
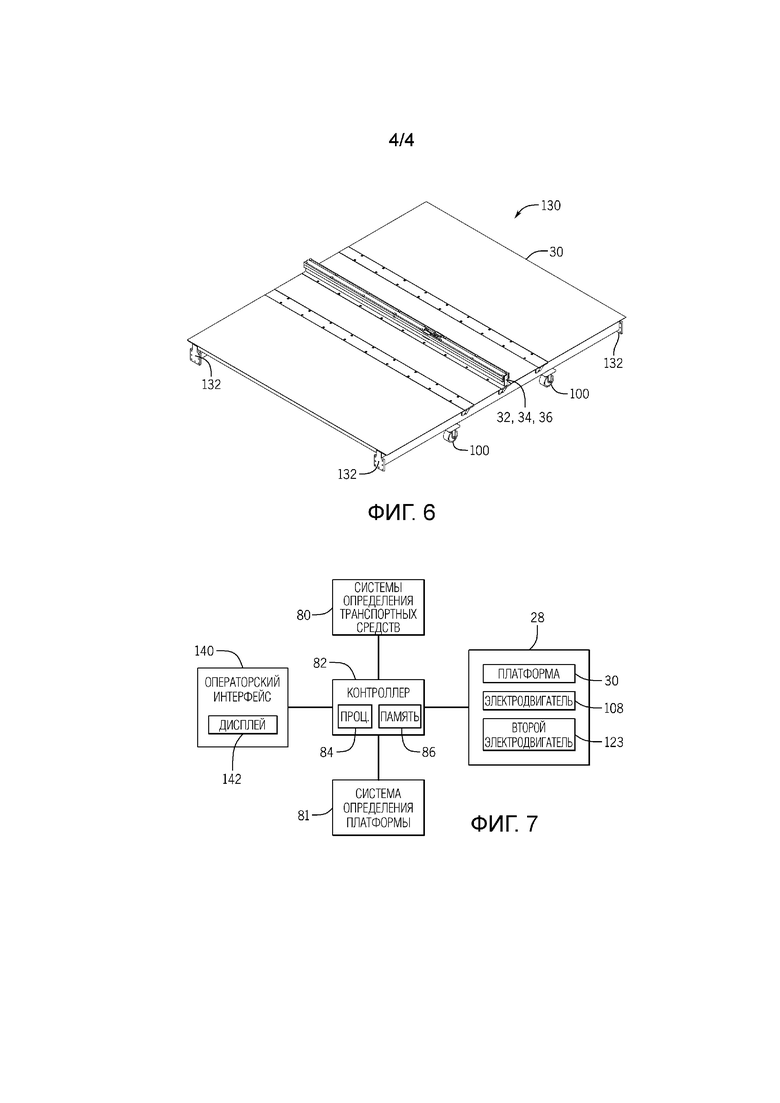
Фиг. 6 - вид сверху в перспективе варианта осуществления участка платформы, показанной на фиг. 1, в соответствии с настоящими способами; и
Фиг. 7 - блок-схема системы аттракциона, показанной на фиг. 1, в соответствии с настоящими способами.
Подробное описание изобретение
Настоящее изобретение предлагает систему и способ для перевода одного или более транспортных средств между соседними направляющими (например, петлями направляющих или линий пути). Например, в развлекательных аттракционах некоторых типов, во время работы аттракциона, пассажиры могут двигаться вдоль одной или более аттракционных петель направляющих в транспортном средстве. Аттракционные направляющей петли могут располагаться, по существу, концентрично и, в некоторых вариантах осуществления могут включать в себя схему расположения с, по меньшей мере, участком аттракционных петель направляющих, располагающихся параллельно. В некоторых вариантах осуществления, возможно, было бы желательно переводить транспортные средства на соседнюю (например, находящуюся вблизи или отстоящую на некоторое расстояние) вспомогательную петлю по различным причинам, например, для технического обслуживания, реконфигурации развлекательного аттракциона и т.д. Однако, перевод транспортных средств между аттракционными петлями направляющих и вспомогательной петлей может быть трудной задачей. В частности, простое поступательное перемещение транспортного средства между направляющими может и не ориентировать транспортное средство для катания надлежащим образом.
Соответственно, в настоящей заявке предлагается узел переключения направляющих, который можно применить в связи с раскрываемыми системой и способом, и который облегчает поступательное перемещение и переориентацию транспортного средства между соседними петлями направляющих, например, между аттракционной направляющей петлей и служебной направляющей петлей. В некоторых вариантах осуществления, узел переключения направляющих допускает одновременное перемещение транспортных средств с разных петель многопетлевого аттракциона на одну служебную петлю таким образом, что оба транспортных средства ориентируются в одном направлении (например, оба по часовой стрелке или оба против часовой стрелки). В противоположность способам, в которых поступательное перемещение на служебную петлю в противоположные по окружности точки на петле приводит к ориентированию двух транспортных средств в противоположных направлениях, узел переключения направляющих допускает поворот, по меньшей мере, одного из транспортных средств с целью получения правильной или искомой ориентации обоих транспортных средств. Кроме того, в некоторых вариантах осуществления, узел переключения направляющих включает в себя также один или более дополнительных сегментов направляющей, которые замыкают аттракционную(ые) петлю или петли, чтобы позволять следующим транспортным средствам перемещаться по аттракционной петле. Таким образом, перемещение транспортных средств на соседнюю вспомогательную петлю обеспечивает минимум нарушения работы аттракциона. Хотя настоящее описание фокусируется на петлях направляющих, настоящие варианты осуществления могут включать в себя также направляющей без петель.
В одном исполнении, аттракцион может включать в себя две, по существу, концентрических аттракционных направляющей петли (например, внутреннюю аттракционную петлю и внешнюю аттракционную петлю) и одну вспомогательную петлю с, по меньшей мере, участком вспомогательной петли, расположенным рядом с участками внешней аттракционной петли. Две аттракционных петли могут проходить по часовой стрелке, и вспомогательная петля может проходить против часовой стрелки. Таким образом, участки двух аттракционных петель, которые располагаются рядом со вспомогательной петлей, могут проходить в том же самом линейном направлении, что и первый участок вспомогательной направляющей, рядом с которым располагаются две аттракционных петли. Кроме того, следует отметить, что вспомогательная петля может иметь такую конфигурацию, что второй участок вспомогательной петли (второй участок, располагающийся, по существу, на противоположной стороне вспомогательной направляющей относительно первого участка вспомогательной направляющей) располагается рядом с первым участком вспомогательной направляющей со стороны первого участка вспомогательной петли, которая противоположна двум аттракционным петлям. Действительно, с учетом прохождения вспомогательной петли против часовой стрелки, второй участок вспомогательной петли может проходить в направлении, противоположном участкам двух аттракционных петель и первому участку вспомогательной петли. Вариант осуществления такой конфигурации изображен на фиг. 1.
Следовательно, с учетом разным направлений прохождения, в частности, с участками аттракционной петли и первым участком вспомогательной петли, проходящими в первом направлении, и вторым участком вспомогательной петли, проходящим во втором (противоположном) направлении, перевод двух транспортных средств между аттракционными петлями и вспомогательной петлей может быть затруднителен. Действительно, транспортные средства могут ориентироваться в первом направлении на аттракционных петлях и не могут просто поступательно перемещаться на соседние первый и второй участки вспомогательной петли за одну операцию поступательного перемещения или переключения. Например, транспортное средство, которое переводят с внешней аттракционной петли, может также нуждаться в повороте в правильную ориентацию, при переводе на второй участок вспомогательной петли. Настоящие варианты осуществления используют эффективные способы для поворота транспортного средства в правильную ориентацию.
В некоторых вариантах осуществления обеспечиваются развлекательные аттракционы, которые включают в себя поступательно перемещаемую платформу с поворотным участком, которая может переводить одно или более транспортных средств между соседними петлями направляющих. Поступательно перемещающаяся платформа может перемещаться по переводной направляющей, который располагается перпендикулярно петлям направляющих, между которыми переводят одно или более транспортных средств. Поступательно перемещающаяся платформа может использовать один (одну) или более электродвигателей и систем определения для эффективного перевода транспортных средств и поворота одного из транспортных средств, при необходимости, чтобы перевести и ориентировать транспортные средства на соседней направляющей.
С учетом вышеизложенного, фиг. 1 представляет вид в перспективе системы 10 аттракциона, которая может переводить и ориентировать транспортные средства 12 между направляющими, как описано в настоящей заявке. Система 10 аттракциона может включать в себя одну или более аттракционных петель 14 (например, двойную направляющую петлю) и вспомогательную петлю 16 (например, одинарную направляющую петлю). В частности, в настоящем варианте осуществления, аттракционные петли 14 включают в себя внутреннюю петлю 18 и внешнюю петлю 20, с перемещением транспортных средств 12 в направлении 22 по часовой стрелке по одной или более направляющим 23. Кроме того, вспомогательная петля 16 может быть одинарной петлей, с перемещением транспортных средств 12 по направляющей 23 в направлении 24 против часовой стрелки. С этой целью, узел 28 переключения направляющих может переводить транспортные средства 12 между аттракционными петлями 14 и вспомогательной петлей 16.
Узел 28 переключения направляющих включает в себя платформу 30, которая может быть, по существу, жестким или упругим объектом с одним или более сегментами направляющих 23, расположенными на платформе. В частности, платформа 30 может включать в себя первый сегмент 32 направляющей, второй сегмент 34 направляющей, третий сегмент 36 направляющей и четвертый сегмент 38 направляющей. Однако, следует понимать, что узел 28 переключения направляющих и платформу 30 можно выполнить с большим или меньшим числом сегментов направляющих, в зависимости от схемы расположения и числа петель. Более того, каждый из сегментов 32, 34, 36 и 38 направляющих может представлять собой пары рельсов, монорельсы или направляющие других типов.
Во время работы, платформа 30 может перемещаться или поступательно перемещаться между участками аттракционных петель 14 и вспомогательной петли 16. Например, как показано на фиг. 1, платформа 30 располагается в первичном положении 39 таким образом, что третий сегмент 36 направляющей располагается на первом участке 40 направляющей 23 внутренней петли 18 или выровнен с упомянутым первым участком, и четвертый сегмент 38 направляющей располагается на втором участке 42 направляющей 23 внешней петли 20 или выровнен с упомянутым вторым участком. Однако, как показано на фиг. 2, платформа 30 может перемещаться по направляющей 44 платформы (например, перпендикулярной направляющей, направляющему рельсу) или транспортеру узла 28 переключения направляющих во вторичное положение 45, чтобы осуществить поступательное перемещение всех сегментов 32, 34, 36, 38 направляющих платформы вдоль направляющей 44 платформы. В результате, во вторичном положении 45, первый сегмент 32 направляющей располагается на первом участке 40 внутренней петли 18, и второй сегмент 34 направляющей располагается на втором участке 42 внешней петли. Хотя изображенный вариант осуществления представляет вторичное положение 45 выравнивающим платформу 30 узла 28 переключения направляющих таким образом, что все сегменты 32, 34, 36, 38 направляющих выровнены с соответствующими направляющим 23 аттракционных петель 14 и вспомогательной петли 16, следует понимать, что платформа 30 может также принимать одно или более промежуточных положений между первичным положением 39 и вторичным положением 45. Промежуточные положения платформы 30 могут характеризоваться тем, что, по меньшей мере, один сегмент 32, 34, 36, 38 направляющей выровнен с направляющей 23 аттракционных петель 14 или вспомогательной петли 16.
В некоторых вариантах осуществления, направляющая 44 платформы может включать в себя две или более отдельных направляющих, по которым может перемещаться платформа 30. Кроме того, в то время, когда платформа 30 находится во вторичном положении 45, третий сегмент 36 направляющей может располагаться на третьем участке 46 вспомогательной петли 16, и четвертый сегмент 38 направляющей может располагаться на четвертом участке 48 вспомогательной петли 16. Следовательно, расстояние между первым и вторым участками 40, 42 может быть, по существу, таким же, как расстояние между третьим и четвертым участками 46, 48. Аналогично, расстояние между первым и вторым сегментами 32, 34 направляющих платформы 30 может быть, по существу, таким же, как расстояние между третьим и четвертым сегментами 36, 38 направляющих. Более того, второй и третий участки 42, 46 могут располагаться с таким же промежутком для облегчения промежуточных выравниваний.
В частности, петли 14, 16 и сегменты 32, 34, 36, 38 направляющих могут располагаться с промежутками и устанавливаться, как описано выше, чтобы дополнительно допускать перевод транспортных средств 12 между аттракционными петлями 14 и вспомогательной петлей 16. Например, транспортные средства 12 могут перемещаться вдоль аттракционных петель 14 и останавливаться внутри первого и второго участков 40, 42 аттракционных петель 14 таким образом, что транспортные средства 12 располагаются на третьем и четвертом сегментах 36, 38 направляющих, когда платформа 30 находится в первичном положении 39. Затем платформа может сдвинуться (например, поступательно переместиться) во вторичное положение 45 таким образом, что третий и четвертый сегменты 36, 38 направляющих располагаются вдоль, ровно в линию или коллинеарно, соответственно, с третьим и четвертым участками 46, 48 вспомогательной петли 16. Кроме того, во время нахождения во вторичном положении 45, первый и второй сегменты 32, 34 направляющих платформы 30 могут располагаться вдоль, ровно в линию или коллинеарно с первым и вторным участками 40, 42 аттракционных петель 14 таким образом, что зазоры не препятствуют транспортным средствам 12 продолжать перемещаться по внутренней и внешней петлям 18, 20. Кроме того, во время нахождения во вторичном положении 45, третий и четвертый сегменты 36, 38 направляющих могут располагаться, соответственно, вдоль третьего и четвертого участков 46, 48 вспомогательной петли 16. Как только платформа 30 оказывается во вторичном положении 45, транспортные средства 12, которые переместились на платформу 30 с аттракционных петель 14, когда платформа 30 находилась в первичном положении 39, может переместиться на вспомогательную петлю 16.
Однако, как упоминалось выше, вследствие порядка движения транспортных средств 12 на аттракционной и вспомогательной петлях 14, 16, транспортные средства 12 на первом участке 40, втором участке 42 и третьем участке 46 могут перемещаться в первом направлении 60, тогда как транспортные средства 12 на четвертом участке 48 перемещаются во втором направлении 62. Следовательно, четвертый сегмент 38 направляющей платформы 30 может быть присоединен к и/или располагаться на верхней поверхности 63 поворотного стола 64 (например, поворотной плиты, круглой плиты, поворотного участка и т.д.), который может поворачиваться и, тем самым, поворачивать четвертый сегмент 38 направляющей и, следовательно, поворачивать также транспортное средство 12, расположенное на четвертом сегменте 38 направляющей. В результате, любое транспортное средство 12, расположенное на сегменте 38 направляющей, можно повернуть так, чтобы транспортное средство 12 было повернуто передком в правильном направлении (например, в первом направлении 60 для второго участка 42 внешней петли 20 и во втором направлении 62 для четвертого участка 48 вспомогательной петли 16). Соответственно, платформа 30 может включать в себя один или более неподвижных сегментов направляющих (например, сегментов 32, 34 и 36 направляющих), которые закреплены в рабочем положении относительно платформы, но которые поступательно перемещаются вместе с платформой 30. Платформа может также включать в себя один или более поворачивающихся сегментов направляющих (например, сегмента 38 направляющей), которые поворачиваются относительно платформы 30, а также относительно любых неподвижных сегментов направляющих, и которые также поступательно перемещаются вместе с платформой 30. Поворот и поступательное перемещение могут происходить последовательно или одновременно.
Например, платформа 30 и, в частности, четвертый сегмент 38 направляющей могут принять одно из транспортных средств 12, при расположении на втором участке 42 внешней петли 20 (например, когда платформа 30 находится в первичном положении 39), и могут затем поступательно переместить транспортное средство 12 на четвертый участок 48 вспомогательной петли 16 во вторичное положение 45. Однако, перед тем, как транспортное средство 12 отводится с четвертого сегмента 38 направляющей и на вспомогательную петлю 16, поворотный стол 64 может повернуть транспортное средство 12 таким образом, что транспортное средство 12 повернуто передком во втором направлении 62 и выровнено с направляющей 23 вспомогательной петли 16 на четвертом участке 48. Угол поворота может определяться положением принимающей направляющей 23 и требуемой ориентации транспортного средства 12. Поворот сегмента 38 направляющей может вызывать поворот из положения, в общем, параллельного неподвижным сегментам направляющих (например, сегментам 32, 34 и 36 направляющих), и поворот может заканчиваться искомым выравниванием и ориентацией, которая может быть также параллельной неподвижному сегменту направляющих, но с поворотом на 180 градусов.
Кроме того, следует отметить, что в некоторых вариантах осуществления, транспортные средства 12 могут двигаться в направлении 24 против часовой стрелки на аттракционных петлях 14 и в направлении 22 по часовой стрелке на вспомогательной петле 16. Дополнительно, в некоторых вариантах осуществления, транспортные средства 12 могут двигаться в направлении 22 по часовой стрелке как на аттракционных петлях 14, так и на вспомогательной петле 16 или в направлении 24 против часовой стрелки как на аттракционных петлях 14, так и на вспомогательной петле 16. В любом случае, узел 28 переключения направляющих может переводить транспортные средства 12 между аттракционными петлями 14 и вспомогательной петлей 16. Например, в некоторых вариантах осуществления, вместо или в дополнение к поворотному столу 64, поворачивающему четвертый сегмент 38 направляющей, можно обеспечить второй поворотный стол для соединения с третьим сегментом 36 направляющей и поворота данного сегмента. В частности, поворот третьего сегмента 36 направляющей посредством второго поворотного стола может быть аналогичным поворота четвертого сегмента 38 направляющей посредством поворотного стола 64, как изложено в настоящем описании. Действительно, поворот третьего сегмента 36 направляющей и/или четвертого сегмента 38 направляющей может учитывать, по меньшей мере, частично, направление передвижения транспортного средства 12 на вспомогательной петле 16 относительно направления передвижения транспортного средства 12 на аттракционных петлях 14.
В некоторых вариантах осуществления, поворотный стол 64 может поворачиваться на 180 градусов или больше или меньше, чем на 180 градусов, в зависимости от ориентации внешней петли 20 и вспомогательной петли 16 на, соответственно, втором и четвертом участках 42, 48. Например, направляющая 23 на втором участке 42 внешней петли 20 может располагаться под одним углом, и направляющая 23 на четвертом участке 48 вспомогательной петли 16 может располагаться под отличающимся углом. Соответственно, в таких вариантах осуществления, второй участок 42 и четвертый участок 48 могут быть и не параллельными, и поворотный стол 64 может поворачиваться больше или меньше, чем на 180 градусов, чтобы перевести транспортное средство 12 между вторым участком 42 и четвертым участком 48. Независимо от величины поворота, требуемого от поворотного стола 64, поворот транспортного средства 12 и/или поворотного стола 64 может происходить в то время, когда платформа 30 находится в первичном положении 39, в процессе перехода из первичного положения 39 во вторичное положение 45, во время нахождения во вторичном положении 45 или в любой комбинированной ситуации из приведенных.
Фиг. 3 является видом сверху платформы 30, расположенной на направляющей 44 платформы в составе системы 10 аттракциона. Как описано выше, платформа 30 может включать в себя первый, второй, третий и четвертый сегменты 32, 34, 36, 38 направляющих. Четвертый сегмент 38 направляющей может располагаться на поворотном столе 64, который выполнен с возможностью поворота, с поворотом, тем самым, четвертого сегмента 38 направляющей. Первое расстояние 70 между первым сегментом 32 направляющей и вторым сегментом 34 направляющей может быть, по существу, равным второму расстоянию 72 между третьим сегментом 36 направляющей и четвертым сегментом 38 направляющей. Однако, первое и второе расстояния 70, 72 могут быть меньше третьего расстояния 74 между вторым сегментом 34 направляющей и третьим сегментом 36 направляющей. Отличие первого и второго расстояний 70, 72 от третьего расстояния 74 может быть обусловлено увеличенным расстоянием между аттракционными петлями 14 и вспомогательной петлей 16. Например, в некоторых вариантах осуществления, увеличенное расстояние между петлями 14, 16 может иметь место для размещения разделителя (например, стенки, границы и т.п.) между аттракционными петлями 14 и вспомогательной петлей 16, чтобы пользователи системы 10 аттракциона не могли видеть вспомогательную петлю 16 во время перемещения в транспортном средстве 12 вдоль большей части любой из аттракционных петель 14. Соответственно, в некоторых вариантах осуществления, платформа 30 может включать в себя проставку 76, соединяющую первый и второй сегменты 32, 34 направляющих с третьим и четвертым сегментами 36, 38 направляющих.
Хотя платформа 30 изображена с одним поворотным столом 64, следует понимать, что на платформе 30 могут присутствовать дополнительные поворотные столы 64 для облегчения одного или более дополнительных сегментов направляющей. Кроме того, следует понимать, что в вариантах осуществления с дополнительными поворотными столами 64, каждым можно управлять независимо.
Система 10 аттракциона может также включать в себя, по меньшей мере, две системы 80 определения транспортных средств и, по меньшей мере, две системы 81 определения платформы, соединенной с платформой 30. Системы 80, 81 определения могут иметь непосредственную связь с контроллером 82. Контроллер 82 может быть любым устройством, использующим процессор 84 (который может представлять собой один или более процессоров), например, специализированный микропроцессор. Контроллер 82 может также включать в себя запоминающее устройство 86 для хранения команд, выполняемых процессором 84, чтобы выполнять описанные здесь способы и управляющие воздействия, связанные с платформой 30. Процессор 84 может включать в себя одно или более процессорных устройств, и запоминающее устройство 86 может включать в себя один или более физических, энергонезависимых машиночитаемых носителей. Например, такие машиночитаемые носители могут включать в себя RAM (оперативную память/ОЗУ), ROM (постоянную память/ПЗУ), EPROM (стираемую программируемую постоянную память/СППЗУ), EEPROM (электрически стираемую программируемую постоянную память/ЭСППЗУ), CD-ROM (компакт-диск) или другое запоминающее устройство на оптических дисках, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, или любой другой носитель, который можно использовать для содержания или хранения искомого программного кода в форме машинно-выполняемых команд или структур данных, и который можно считывать процессором 84 или любым универсальным или специализированным компьютером или другой машиной с процессором.
В варианте осуществления, изображенным на фиг. 3, система 10 аттракциона включает в себя две системы 80 определения транспортных средств, расположенные рядом с противоположными участками 83 длины платформы 30. В частности, система 80 определения транспортных средств может располагаться по или быть присоединенной к первому, второму, третьему и четвертому участкам 40, 42, 46, 48 аттракционных петель 14 и вспомогательной петли 16. На самом деле, в настоящем варианте осуществления, системы 80 определения транспортных средств могут быть физически отделены от платформы 30, и платформа 30 может перемещаться относительно систем 80 определения транспортных средств, когда платформа 30 переходит между первичным положением 39 и вторичным положением 45. Однако, в других вариантах осуществления, системы 80 определения транспортных средств могут быть соединены с платформой 30 посредством выступающей части (например, опоры, стержня и т.п.), подсоединяющей компоненты (например, датчики) системы 80 определения транспортных средств к платформе 30.
В некоторых вариантах осуществления может быть, по меньшей мере, три системы 80 определения транспортных средств. Например, в некоторых вариантах осуществления может быть восемь систем 80 определения транспортных средств. В частности, в вариантах осуществления, в которых системы 80 определения транспортных средств соединены с платформой 30, как описано выше, может существовать система 80 определения транспортных средств, соединенная с противоположными участками 83 длины платформы и на противоположных сторонах каждого из первого сегмента 32 направляющей, второго сегмента 34 направляющей, третьего сегмента 36 направляющей и четвертого сегмента 38 направляющей.
В вариантах осуществления, в которых системы 80 определения транспортных средств являются отдельными от платформы 30, и платформа 30 перемещается относительно систем 80 определения транспортных средств, при этом система 80 определения транспортных средств может располагаться, в общем, рядом с противоположными участками 83 длины платформы и параллельно данным участкам и с обеих сторон от каждого из первого участка 40, второго участка 42, третьего участка 46 и четвертого участка 48 аттракционных петель 14 и вспомогательной петли 16.
Каждая система 80 определения транспортных средств может обнаруживать транспортные средства 12, поступающие на платформу 30 и/или сходящие с нее. С данной целью, каждая система 80 определения транспортных средств может включать в себя излучатель 88 датчика и приемник 90 датчика. В одном исполнении, излучатель 88 датчика может излучать пучок (например, лазера или света, усиленного стимулированным испусканием излучения), который может приниматься приемником 90 датчика. Если транспортное средство 12 проходит между излучателем 88 датчика и приемником 90 датчика, то транспортное средство 12 может прерывать пучок, так что приемник 90 датчика, по меньшей мере, временно не принимает (например, не ощущает) пучок, испускаемый из излучателя 88 датчика. Если приемник 90 датчика не принимает пучок, по меньшей мере, временно, то система 80 определения транспортных средств может передать в контроллер 82 сигнал, показывающий, что одно из транспортных средств 12 прошло соответствующую систему 80 определения транспортных средств и, в частности, пересекло траекторию пучка из излучателя 88 датчика в приемник 90 датчика соответствующей системы 80 определения транспортных средств. В некоторых вариантах осуществления, система 80 определения транспортных средств может также посылать в контроллер сигнал времени, показывающий промежуток времени, в течение которого приемник 90 датчика не принимает пучок. Контроллер 82 может использовать сигнал времени для определения скорости транспортного средства 12, когда оно проходит через траекторию пучка.
Контроллер 82 может также принимать информацию из системы 81 определения платформы. Как показано на фиг. 3, система 81 определения платформы может располагаться на краю участка длины хода платформы 30, когда платформа 30 передвигается между первичным положением 39 и вторичным положением 45. Например, система 81 определения платформы может включать в себя первый датчик 92 платформы, который может определять, когда платформа 30 приближается к первичному положению 39 или находится в нем. Аналогично, система 81 определения платформы может также включать в себя второй датчик 94 платформы, который может определять, когда платформа 30 приближается к вторичному положению 45 или находится в нем. Первый и второй датчики 92, 94 платформы могут быть датчиками приближения, включая, но без ограничения, емкостные датчики, емкостные датчики смещения, допплеровские датчики, вихретоковые датчики, индуктивные датчики, магнитные датчики, оптические датчики, радиолокационные датчики, сонары, ультразвуковые датчики, датчики Холла или любую их комбинацию. В некоторых вариантах осуществления, первый и второй датчики 92, 94 платформы, могут быть механическими переключателями, которых платформа 30 может приводить в действие (например, переключать, активизировать и т.п.) путем физического контакта. В некоторых вариантах осуществления, первый и второй датчики 92, 94 платформы могут физически блокировать перемещения платформы 30 за, соответственно, первичное и вторичное положения 39, 45. Например, в некоторых вариантах осуществления, первый и второй датчики 92, 94 платформы могут включать в себя физический стопор или буфер для останова движения платформы 30. Первый и второй датчики 92, 94 платформы могут независимо располагаться так, что первый датчик 92 платформы может опознавать или активизироваться, когда платформа 30 находится в первичном положении 39, и второй датчик 94 платформы может опознавать или активизироваться, когда платформа 30 находится во вторичном положении 45. Когда система 81 определения платформы определяет присутствие платформы 30 (например, в либо первичном, либо вторичном положении 39, 45), система 81 определения платформы может посылать в контроллер 82 сигнал положения, указывающий местоположение платформы 30.
Как дополнительно подробно описано ниже по отношению к фиг. 4 и 5, платформа 30 может иметь, по меньшей мере, частичный привод от одного или более электродвигателей для поступательного перемещения между первичным и вторичным положениями 39, 45 и поворота поворотного стола 64. В дополнительном или альтернативном варианте, платформа 30 может включать в себя крепежные элементы 96 для поступательного перемещения и крепежные элементы 98 для поворота, которыми могут пользоваться операторы, чтобы, по меньшей мере, частично, приводить в движение (например, двигать) платформу 30 для перемещения между первичным и вторичным положениями 39, 45 и поворачивать поворотный стол 64. Крепежные элементы 96, 98 могут быть любой подходящей конструкцией или объектом, к которой(ому) оператор может присоединить инструмент (например, шток, крюк и т.п.). В некоторых вариантах осуществления, крепежные элементы 96, 98 могут быть небольшими жесткими петлями, например, проушинами, проходящими над платформой 30. Операторы могут поступательно переместить платформу 30 между первичным и вторичным положениями 39, 45 посредством присоединения инструмента к крепежным элементам 96 для поступательного перемещения и протягивания и/или проталкивания платформы 30 между первичным и вторичным положениями 39, 45. Аналогично, оператор может повернуть платформу 30 посредством присоединения инструмента к крепежным элементам 98 для поворота и протягивания и/или проталкивания поворотного стола 64 в, по существу, тангенциальном направлении относительно центра поворотного стола 64.
Фиг. 4 и 5 представляют виды в перспективе участка 99 поворотного стола платформы 30, которая включает в себя поворотный стол 64. В частности, фиг. 4 представляет вид снизу участка 99 поворотного стола платформы 30, а фиг. 5 представляет вид сверху участка 99 поворотного стола, при этом поворотный стол 64 не показан, чтобы лучше отобразить некоторые характерные элементы платформы 30. В общем, участок 99 поворотного стола платформы 30 может включать в себя несколько характерных элементов, чтобы допускать функционирование платформы 30, как изложено в настоящей заявке. Например, участок 99 поворотного стола может включать в себя, по меньшей мере, два ролика (например, колеса) 100 для поступательного перемещения, по меньшей мере, два ролика (например, колеса) 102 для поворотного перемещения, амортизирующий узел 104, один или более фиксаторных узлов 106, электродвигатель 108, силовую шину 110, редуктор 112 или любую их комбинацию. Следует отметить, что подобная, но, по существу, обратная схема расположения используется в вариантах осуществления с транспортными средствами 12, которые могут свисать с направляющих 23 верхнего расположения.
Ролики 100 для поступательного перемещения могут соединяться с платформой 30 и перемещаться по полу системы 10 аттракциона, когда платформа 30 поступательно перемещается между первичным и вторичным положениями 39, 45. В некоторых вариантах осуществления, ролики 100 для поступательного перемещения могут перемещаться по стационарной платформе, приподнятой над полом системы 10 аттракциона. В частности, ролики 100 для поступательного перемещения могут нести, по меньшей мере, часть веса платформы 30 и уравновешивать платформу 30, когда платформа 30 перемещается по направляющей 44 платформы (фиг. 3). В некоторых вариантах осуществления, платформа 30 может включать в себя любое подходящее число роликов 100 для поступательного перемещения. Ролики 102 для поворотного перемещения могут, в частности, соединяться с участком 99 поворотного стола платформы 30, но, в отличие от роликов 100 для поступательного перемещения, ролики 102 для поворотного перемещения могут стыковаться с нижней поверхностью поворотного стола 64. Например, по меньшей мере, часть веса поворотного стола 64 и/или транспортного средства 12 может держаться на роликах 102 для поворотного перемещения. Таким образом, когда поворотный стол 64 поворачивается (например, для поворота транспортного средства 12), ролики 102 для поворотного перемещения могут катиться по нижней поверхности поворотного стола 64. Действительно, ролики 102 для поворотного перемещения могут быть ориентированы так, чтобы ролики 102 для поворотного перемещения катались по нижней поверхности поворотного стола 64 в тангенциальном направлении относительно центра поворотного стола 64. В некоторых вариантах осуществления ролики 102 для поворотного перемещения могут быть присоединены к консолям 114 (например, жестким балкам), проходящим наружу из участка 99 поворотного стола ниже центра поворотного стола 64.
Участок 99 поворотного стола может также включать в себя амортизирующий узел 104. В некоторых вариантах осуществления, амортизирующий узел 104 может включать в себя один или более амортизаторов 116 и буфер 118. Положение амортизаторов 116 может устанавливать величину поворота, допускаемого поворотным столом 64. В настоящем варианте осуществления, платформа 30 включает в себя два амортизатора 116, расположенных на противоположных концах участка 99 поворотного стола, и буфер 118 соединен с нижней поверхностью поворотного стола 64. Таким образом, поворот поворотного стола 64 ограничен 180 градусами. Например, при угле поворота ноль градусов, буфер 118 может контактировать с одним из амортизаторов 116. Затем поворотный стол 64 можно повернуть на 180 градусов до того, как буфер 118 приходит в контакт с другим амортизатором 116, который препятствует дальнейшему повороту поворотного стола 64. Амортизаторы 116 и буфер 118 могут быть изготовлены из множества различных износостойких материалов, включая резины, пластики и/или металлы. В некоторых вариантах осуществления, амортизаторы 116 могут располагаться так, чтобы поворотный стол 64 имел возможность поворачиваться на угол больше или меньше 180 градусов.
Фиксаторные узлы 106 могут взаимодействовать с амортизирующим узлом 104, чтобы способствовать установке конечного поворотного положения поворотного стола 64. Например, когда буфер 118 контактирует с одним из амортизаторов 116, один или более фиксаторных узлов 106 могут входить в зацепление для блокирования, тем самым, поворота поворотного стола 64 из искомого положения. В настоящем варианте осуществления, узел фиксаторный узел 106 включает в себя стопорный палец 120 и два уловителя 122 стопорного пальца. Стопорный палец 120 может быть соединен с участком 99 поворотного стола платформы 30, и уловители 122 стопорного пальца могут быть соединены с поворотным столом 64 на противоположных концах поворотного стола 64 (например, под углом 180 градусов друг к другу относительно центра поворотного стола 64). Таким образом, когда поворотный стол 64 находится в первом положении (например, под углом ноль градусов), один из уловителей 122 стопорного пальца может располагаться над стопорным пальцем 120. Чтобы не допустить поворота из первого положения, стопорный палец 120 можно привести в действие (например, гидроприводом) для прохождения в уловитель 122 стопорного пальца, для фиксации поворотного стола в первом положении. Фактически, чтобы поворотный стол 64 повернулся из первого положения, стопорный палец 120 сначала можно вывести из уловителя 122 стопорного пальца. После этого поворотный стол 64 может повернуться (например, повернуться на 180 градусов) во второе положение, так что другой уловитель 122 стопорного пальца установился над стопорным пальцем 120. И снова, чтобы тогда не допустить поворота поворотного стола 64 из второго положения, стопорный палец 120 в действие для прохождения в уловитель 122 стопорного пальца. В некоторых вариантах осуществления, уловители 122 стопорного пальца могут располагаться для фиксации поворотного стола 64 в положениях, находящихся друг от друга по углу больше или меньше 180 градусов.
Как также упоминалось выше, участок 99 поворотного стола платформы 30 может включать в себя электродвигатель 108, редуктор 112 и силовую шину 110. Электродвигатель 108 может прикладывать крутящий момент к редуктору 112. При этом, редуктор 112 может превращать крутящий момент, прилагаемый электродвигателем 108, в подходящую скорость вращения, которая придается поворотному столу 64 через соединительную муфту. Соединительная муфта может быть шлицевым соединением, выполненным с возможностью вмещения поворотным столом 64. Таким образом, крутящий момент от электродвигателя 108 может прилагаться к поворотному столу 64, чтобы поворачивать поворотный стол 64. В некоторых вариантах осуществления, электродвигатель 108 также служит силовым приводом для поступательного перемещения платформы 30 между первичным и вторичным положениями 39, 45. В других вариантах осуществления, платформа 30 может включать в себя второй электродвигатель 123 (фиг. 3), который специально предназначен для поступательного перемещения платформы 30 между первичным и вторичным положениями 39, 45. В таких вариантах осуществления, второй электродвигатель 123 может быть установлен на полу системы 10 аттракциона, и платформа 30 может перемещаться относительно второго электродвигателя 123. Далее, в некоторых вариантах осуществления, силовая шина 110 может принимать энергию из источника питания (например, генератора, электросети и т.п.), чтобы подавать питание в электродвигатель 108. В некоторых вариантах осуществления, электродвигатель 108 может получать питание непосредственно из источника питания (например, по проводу). В некоторых вариантах осуществления, силовая шина 110 может иметь коммуникативное соединение с контроллером 82 и передавать различные параметры (например, положение) платформы 30 в контроллер 82. В некоторых вариантах осуществления, платформа 30 может включать в себя один или более датчиков 128 поворота (например, кодеров, магнитных датчиков, датчиков Холла и т.п.), которые могут измерять угол поворота поворотного стола 64. В частности, в некоторых вариантах осуществления, электродвигатель 108 может включать в себя датчик 128 поворота. В общем, один или более датчиков 128 поворота могут измерять величину поворота поворотного стола 64 и посылать данные, характеризующие измеренную величину угла поворота в контроллер 82, который, в таком случае, может определять величину поворота поворотного стола 64 по этим данным.
Фиг. 6 является видом в перспективе неповоротного участка 130 платформы 30, который может включать в себя первый, второй или третий сегменты 32, 34, 36 направляющих. Аналогично участку 99 поворотного стола, неповоротный участок 130 может включать в себя ролики 100 для поступательного перемещения (например, колеса), которые могут нести вес неповоротного участка 130 и любого транспортного средства 12, которое может располагаться на неповоротном участке 130. Ролики 100 для поступательного перемещения могут также способствовать равновесию платформы 30, когда она поступательно перемещается между первичным и вторичным положениями 39, 45. Кроме того, участок 99 поворотного стола и неповоротный участок 130 платформы 30 могут соединяться друг с другом соединительными планками 132. Например, соединительные планки 132 участка (например, участка 99 поворотного стола и/или неповоротного участка 99, 130) платформы 30 могут присоединяться к соединительным планкам 132 соседнего участка платформы 30. В некоторых вариантах осуществления, соединительные планки 132 соседних участков платформы 30 можно скреплять болтами друг с другом. Поэтому, соединительные планки 132 можно легко разъединять по разным причинам (например, при техническом обслуживании). Однако, дополнительно или в качестве альтернативы, соединительные планки 132 соседних участков платформы 30 можно сваривать друг с другом.
Фиг. 7 является блок-схемой системы 10 аттракциона. Как видно на фиг. 7, контроллер 82 коммуникативно соединен с платформой 30, системами 80 определения транспортных средств и системами 81 определения платформы. Фактически, в некоторых вариантах осуществления, контроллер 82, платформа 30, системы 80 определения транспортных средств и системы 81 определения платформы могут обмениваться информацией по беспроводной сети (например, беспроводным локальным сетям [WLAN], беспроводным глобальным сетям [WWAN], сети связи малого радиуса действия [NFC]) и/или по проводной сети (например, локальным сетям [LAN], глобальным сетям [WAN]).
Как описано выше, контроллер 82 может принимать различные сигналы из системы 80 определения транспортных средств и/или системы 81 определения платформы, относящиеся к положениям транспортных средств 12 и платформы 30. Как также описано выше, контроллер 82 может обрабатывать и анализировать упомянутые сигналы, чтобы определять положения транспортных средств 12 и платформы 30. В некоторых вариантах осуществления, контроллер 82 может передавать положения транспортных средств 12 и платформы 30 оператору посредством операторского интерфейса 140, который может включать в себя дисплей 142. В некоторых вариантах осуществления, оператор может передавать один или более сигналов в контроллер 82 посредством операторского интерфейса 140, чтобы управлять платформой 30, как описано в настоящей заявке, например, чтобы поступательно переместить и/или повернуть участки платформы 30.
Например, в одном варианте осуществления, контроллер 82 может принимать сигнал или данные о том, что одно или более транспортных средств 12, подходящих к узлу 28 переключения направляющих, подлежат плановому техническому обслуживанию или помечены признаком ошибки или другого технического обслуживания, относящимся к транспортным средствам 12. Когда транспортное средство или транспортные средства 12 приближается(ются) к узлу 28 переключения направляющих, транспортные средства 12 получают тормозной сигнал для замедления с целью перемещения в положение на узле 28 переключения направляющих. Если платформа 30 не находится в положении для приема транспортных средств 12, то узел 28 переключения направляющих также получает сигнал для перемещения поворотного стола 64 к соответствующей направляющей 23 аттракционных петель 14. По сигналам, что транспортные средства 12 находятся в заданном положении (например, из системы 80 определения транспортных средств), узел 28 переключения направляющих включается для перемещения платформы 30 и поворотного стола 64, чтобы переместить транспортные средства 12 на вспомогательную петлю 16. В другом примере, когда аттракцион для катания работает, и транспортные средства 12, передвигающиеся по аттракционным петлям 14, не посылают сигнала о техническом обслуживании, платформа 30 находится в таком положении, что ее сегменты направляющих, замыкают или дополняют аттракционные петли 14 и позволяют транспортным средствам 12, которые не нуждаются в техническом обслуживания переезжать по платформе 30 в то время, когда платформа 30 является стационарной.
Хотя в настоящей заявке отражены и описаны только некоторые признаки изобретения, специалистам в данной области техники придут в голову многочисленные модификации и изменения. Поэтому следует понимать, что прилагаемая формула изобретения предназначена для охвата всех таких модификаций и изменений, которые находятся в рамках действительного существа изобретения.
Способы, представленные и заявленные в настоящей заявке, относятся и применяются к материальным объектам и конкретным примерам практического характера, которые очевидно усовершенствуют настоящую область техники и, по существу, не являются отвлеченными, нематериальными или исключительно теоретическими. Кроме того, если какие-либо пункты формулы изобретения, приложенной в конце настоящего описания, содержат один или более элементов, обозначенных как «средство для выполнения функции …» или «этап для выполнения функции …», то предполагается, что такие элементы следует интерпретировать в соответствии с параграфом 112(f) раздела 35 Кодекса законов США. Однако, для любых пунктов формулы изобретения, содержащих элементы, обозначенные любым другим способом, предполагается, что такие элементы не подлежат интерпретации в соответствии с параграфом 112(f) раздела 35 Кодекса законов США.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССАЖИРСКОЕ КРЕПЛЕНИЕ ДЛЯ РАЗВЛЕКАТЕЛЬНОГО АТТРАКЦИОНА ДЛЯ КАТАНИЯ | 2018 |
|
RU2756725C2 |
| ПЕРЕМЕЩАЮЩАЯСЯ ДЕМОНСТРАЦИОННАЯ ДВЕРЬ | 2015 |
|
RU2633222C1 |
| СИСТЕМА АТТРАКЦИОНА ДЛЯ КАТАНИЯ (ВАРИАНТЫ) | 2020 |
|
RU2768137C1 |
| СИСТЕМА АТТРАКЦИОНА ДЛЯ КАТАНИЯ С ПОДЪЕМНИКОМ С МНОЖЕСТВЕННЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2764236C1 |
| ПОРОЖДАЮЩИЙ ДВИЖЕНИЕ ПЛАТФОРМЕННЫЙ МОДУЛЬ | 2018 |
|
RU2713251C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ АТТРАКЦИОНА ПАРКА РАЗВЛЕЧЕНИЙ | 2016 |
|
RU2714653C2 |
| СИСТЕМА АТТРАКЦИОНА ДЛЯ КАТАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2018 |
|
RU2769881C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ АТТРАКЦИОНА (ВАРИАНТЫ) И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2018 |
|
RU2769882C2 |
| ПРИВОДНАЯ СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ВЕРТИКАЛЬНОГО ДВИЖЕНИЯ ДЛЯ СИСТЕМЫ АТТРАКЦИОНОВ ДЛЯ КАТАНИЯ | 2020 |
|
RU2765528C1 |
| СИСТЕМА И СПОСОБ ДЛЯ КОМНАТЫ ДЛЯ ТРАНСПОРТИРОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2668049C2 |
В соответствии с одним вариантом осуществления система аттракциона для катания включает в себя двойную направляющую петлю, включающую в себя первую направляющую петлю и вторую направляющую петлю, одинарную направляющую петлю, отстоящую от двойной направляющей петли, и перекрестную направляющую, проходящую между двойной направляющей петлей и одинарной направляющей петлей. Система также включает в себя платформу, расположенную на перекрестной направляющей. Платформа выполнена с возможностью поступательного перемещения между положением, выровненным с первой направляющей петлей и второй направляющей петлей двойной направляющей петли, и положением, выровненным с первым участком и вторым участком одинарной направляющей петли. Система дополнительно включает в себя поворотный стол, соединенный с платформой и выполненный с возможностью поворота транспортного средства для катания, расположенного на поворотном столе, и изменения ориентации транспортного средства для катания относительно неподвижного участка платформы. 3 н. и 16 з.п. ф-лы, 7 ил.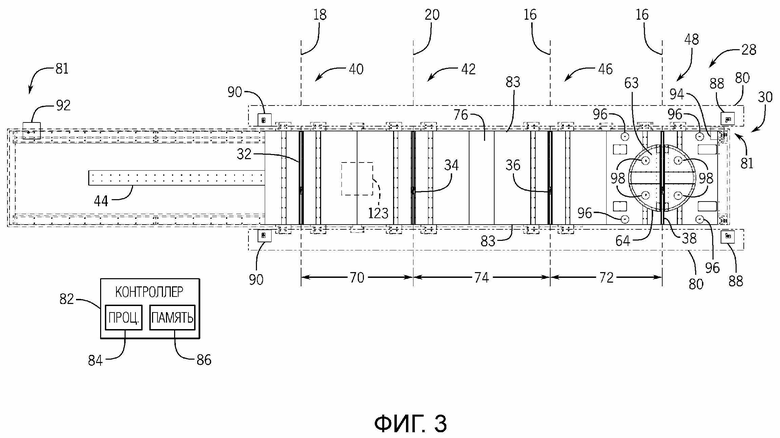
1. Система аттракциона для катания, содержащая:
двойную направляющую петлю, содержащую первую направляющую петлю и вторую направляющую петлю;
одинарную направляющую петлю, отстоящую от двойной направляющей петли;
перекрестную направляющую, проходящую между двойной направляющей петлей и одинарной направляющей петлей;
платформу, расположенную на перекрестной направляющей, при этом платформа выполнена с возможностью поступательного перемещения между положением, выровненным с первой направляющей петлей и второй направляющей петлей двойной направляющей петли, и положением, выровненным с первым участком и вторым участком одинарной направляющей петли; и
поворотный стол, соединенный с платформой и выполненный с возможностью поворота первого транспортного средства для катания, расположенного на поворотном столе, и изменения ориентации первого транспортного средства для катания относительно второго транспортного средства на неподвижном участке платформы.
2. Система по п. 1, в которой первое расстояние, разделяющее первую направляющую петлю и вторую направляющую петлю вблизи перекрестной направляющей, приблизительно равно второму расстоянию, разделяющему первый участок и второй участок одинарной направляющей петли вблизи перекрестной направляющей.
3. Система по п. 1, содержащая электродвигатель, выполненный с возможностью поворота первого транспортного средства для катания посредством поворотного стола.
4. Система по п. 1, в которой платформа выполнена с возможностью приема первого транспортного средства для катания с первой направляющей петли и второго транспортного средства для катания со второй направляющей петли в то время, когда платформа находится в первичном положении, причем одинарная направляющая петля выполнена с возможностью приема первого транспортного средства для катания и второго транспортного средства для катания с платформы в то время, когда платформа находится во вторичном положении.
5. Система по п. 4, в которой платформа выполнена с возможностью приема первого транспортного средства для катания в то время, когда первое транспортное средство для катания ориентировано в первом направлении относительно платформы, при этом одинарная направляющая петля выполнена с возможностью приема первого транспортного средства для катания в то время, когда первое транспортное средство для катания ориентировано во втором направлении относительно платформы, причем первое направление по существу противоположно второму направлению.
6. Система по п. 4, в которой платформа содержит первый сегмент направляющей, второй сегмент направляющей, третий сегмент направляющей и четвертый сегмент направляющей, причем четвертый сегмент направляющей соединен с поворотным столом платформы.
7. Система по п. 6, в которой третий сегмент направляющей по существу коллинеарен с первой направляющей петлей, а четвертый сегмент направляющей по существу коллинеарен со второй направляющей петлей в то время, когда платформа находится в первичном положении.
8. Система по п. 6, в которой первый сегмент направляющей по существу коллинеарен с первой направляющей петлей, второй сегмент направляющей по существу коллинеарен со второй направляющей петлей, третий сегмент направляющей пути по существу коллинеарен с первым участком одинарной направляющей петлей, а четвертый сегмент направляющей по существу коллинеарен со вторым участком одинарной направляющей петли в то время, когда платформа находится во вторичном положении.
9. Система по п. 1, содержащая:
систему определения транспортных средств, выполненную с возможностью определения местоположения первого транспортного средства для катания;
систему определения платформы, выполненную с возможностью определения положения платформы; и
контроллер, выполненный с возможностью координации работы платформы по данным, принятым из системы определения транспортных средств, указывающих местоположение первого транспортного средства для катания, и по данным, принятым из системы определения платформы, указывающим положение платформы.
10. Система аттракциона для катания, содержащая:
платформу, содержащую стационарный участок и поворотный участок;
сегмент направляющей, соединенный с поворотным участком, причем поворотный участок выполнен с возможностью поворота относительно стационарного участка для обеспечения поворота сегмента направляющей;
первый электродвигатель, соединенный с поворотным участком и выполненный с возможностью поворота поворотного участка;
направляющий рельс, соединенный с платформой таким образом, что стационарный участок и поворотный участок платформы выполнены с возможностью поступательного перемещения вдоль направляющего рельса; и
второй электродвигатель, соединенный с платформой и выполненный с возможностью поступательного перемещения платформы вдоль направляющего рельса.
11. Система по п. 10, в которой сегмент направляющей является первым сегментом направляющей, причем дополнительно имеется второй сегмент направляющей, третий сегмент направляющей и четвертый сегмент направляющей, соединенные со стационарным участком, при этом поворот поворотного участок обеспечивает изменение ориентации первого сегмента направляющей относительно второго сегмента направляющей, третьего сегмента направляющей и четвертого сегмента направляющей.
12. Система по п. 10, содержащая одну или более систем определения транспортных средств, выполненных с возможностью определения одного или более транспортных средств для катания, поступающих на платформу и/или сходящих с нее.
13. Система по п. 10, содержащая систему определения платформы, выполненную с возможностью определения местоположения платформы вдоль направляющего рельса.
14. Система по п. 10, в которой платформа выполнена с возможностью поступательного перемещения по сигналу от контроллера о том, что транспортное средство, расположенное на платформе, подлежит плановому техническому обслуживанию.
15. Способ эксплуатации аттракциона для катания, при котором:
принимают на первый сегмент направляющей платформы первое транспортное средство для катания от первой направляющей, причем платформа содержит стационарный участок и поворотный участок;
принимают на второй сегмент направляющей платформы второе транспортное средство для катания от второй направляющей;
поступательно перемещают стационарный участок и поворотный участок платформы вдоль направляющей с использованием первого электродвигателя, чтобы переместить первое транспортное средство для катания от первой направляющей для выравнивания первого сегмента направляющей с первым участком третьей направляющей петли и чтобы переместить второе транспортное средство для катания от второй направляющей для выравнивания второго сегмента направляющей со вторым участком третьей направляющей петли;
поворачивают поворотный участок платформы с использованием второго электродвигателя для поворота второго транспортного средства для катания;
отправляют первое транспортное средство для катания с платформы на третью направляющую петлю; и
отправляют второе транспортное средство для катания с платформы на третью направляющую петлю.
16. Способ по п. 15, при котором:
определяют посредством контроллера местоположение платформы.
17. Способ по п. 15, при котором:
определяют посредством контроллера то, что платформа принимает первое транспортное средство для катания или второе транспортное средство для катания, на основе первого сигнала от датчика определения транспортного средства; и
определяют посредством контроллера то, что платформа отправляет первое транспортное средство для катания или второе транспортное средство для катания, на основе второго сигнала от датчика определения транспортного средства.
18. Способ по п. 15, при котором:
поступательно перемещают платформу по сигналу на техническое обслуживание, относящемуся к, по меньшей мере, первому транспортному средству для катания или второму транспортному средству для катания.
19. Способ по п. 15, при котором поступательное перемещение платформы и поворот платформы осуществляют одновременно.
| US 2004144620 A1, 29.07.2004 | |||
| US 2005092580 A1, 05.05.2005 | |||
| US 2019070515 A1, 07.03.2019 | |||
| EP 3031756 A1, 15.06.2016. |

