Настоящее изобретение в широком смысле относится к способу локализации и отбора колонии микроорганизмов и идентификации микроорганизмов с помощью МАЛДИ, более конкретно МАЛДИ-TOF-MS (матрично-активированная лазерная десорбция/ионизация - времяпролетная масс-спектрометрия), и системам для осуществления данного способа.
Анализ с помощью МАЛДИ является полезным инструментом для решения структурных проблем в области биохимии, иммунологии, генетики и биологии. Образцы ионизируются в газовой фазе, а времяпролетный анализатор (TOF) применяется для измерения ионных масс. Анализ времени пролета начинается после того, как ионы образуются и разгоняются до постоянной кинетической энергии, когда они входят в область дрейфа. Они достигают детектора спустя время пролета, пропорциональное квадратному корню их массы. Масс-спектр образуется в результате того, что ионы разной массы достигают детектора в разное время.
Масс-спектрометрия может быть мощным инструментом в области открытия и разработки лекарственных препаратов, генотипирования и протеомных исследований. Помимо этого, МАЛДИ уже применяли для описания и идентификации микроорганизмов. Современной тенденцией в исследованиях является анализ все большего и большего количества образцов с применением количеств отдельных образцов в диапазоне от микромолярного до атомолярного уровней. В результате образцы также становятся меньше, и существует необходимость в эффективном и надежном сборе соответствующего количества микроорганизмов и точного нанесения соответствующего количества образца на подложку, применяемую в инструменте МАЛДИ.
При обычной работе с МАЛДИ-TOF-MS анализируемый образец распределяют или наносят на металлическую мишень (также называемую мишенью или мишенью МАЛДИ), добавляют реагенты (матрицу), которые обеспечивают ионизацию, и высушивают их для формирования кристаллов. В данных инструментах мишень располагается в фиксированном положении в инструменте МАЛДИ. Мишень имеет множество точек нанесения образца (например, от 24 до 384 точек нанесения на одной мишени), и данные точки нанесения имеют фиксированную ориентацию относительно краев мишени. Мишень помещают на двухкоординатную (X-Y) подставку, и таким образом обеспечивается возможность поместить полученный образец колонии микроорганизмов на конкретную точку нанесения. Между мишенью и металлической решеткой поддерживается высокое напряжение. Данное напряжение может быть как постоянным, так и импульсным, в зависимости от желаемого результата и вакуума, создающегося в камере. Лазер выстреливает в образец/матрицу, и образуется облако ионов. Разность напряжений применяется для ускорения движения ионов по пролетной трубе так, что они могут быть проанализированы. Анализ напрямую связан с отношением времени полета к массе ионизированного компонента.
Несколько параметров могут влиять на качество анализа, в том числе качество плоскости мишени, количество и тип матрицы, концентрация образца, проводимости мишени, точность нанесения в точку нанесения образца, а также другие переменные.
В частности, важным аспектом является пробоподготовка и концентрация образца. Известно, что суспензию получают из образца колонии микроорганизмов и что исследователь переносит каплю полученной суспензии, содержащей образец, в точку нанесения образца на мишени вручную. Однако для того, чтобы обеспечить корректный анализ, суспензия должна содержать достаточную концентрацию образца с самого начала.
Для приготовления данной суспензии образца микроорганизмов существует портативное устройство, имеющее привод. Привод включает корпус с роторным двигателем в нем, а также разъем, который предназначен для разъемного соединения устройства с инструментом для отбора колоний с приводом. Устройство с инструментом для отбора колоний включает зону захвата образцов, которая первой осуществляет контакт с биологическим материалом (в основном, выращенным на чашке для культивирования) для анализа. Далее зона захвата образцов присоединяется к поворотному приводу, осуществляющему контакт с жидкой средой, содержащейся в пробирке, и поворотный привод активируется на определенный период времени таким образом, что образец биологического материала в устройстве с инструментом для отбора колоний высвобождается в жидкую среду. После того как захватывающая зона удаляется от пробирки, суспензионная пробирка содержит суспензию, включающую образец, которую, например, можно применять для осуществления анализа с помощью МАЛДИ.
Однако эффективность высвобождения образца из захватывающей зоны в некоторых случаях может оказаться недостаточной для выполнения корректного анализа микроорганизма, суспендированного в жидкой среде. Это может привести к приготовлению суспензии, которую невозможно применять, и в результате к потере времени и денег. Кроме того, так как захватывающая зона вращается внутри пробирки, пробирка должна иметь достаточный размер для того, чтобы обеспечить данное вращение без контакта захватывающей зоны с внутренней стенкой пробирки, который может помещать высвобождению микроорганизмов в жидкую среду. Данная пробирка, имеющая сравнительно большой размер, соответственно, содержит сравнительно большой объем жидкой среды, что, соответственно, приводит к более длительному времени дальнейшей обработки данной жидкой суспензионной среды. Например, время, в течение которого жидкость, включающую образец, необходимо инкубировать в инкубаторе, пропорционально количеству суспензионной жидкости. Соответственно, существует необходимость в способе, при котором приготовление суспензии образца микроорганизмов осуществляется автоматически, обеспечивая гораздо более воспроизводимый способ подготовки данной суспензии. Помимо этого, существует необходимость в надежном и воспроизводимом высвобождении образца в точку нанесения на мишени.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
С целью решения по меньшей мере одной из проблем, указанных выше, настоящее изобретение обеспечивает способ локализации и отбора колонии микроорганизмов на чашке для культивирования и идентификации микроорганизмов в указанной отобранной колонии с помощью МАЛДИ, где указанный способ включает автоматизированные этапы локализации и отбора колонии микроорганизмов на чашке для культивирования, получения образца указанной отобранной колонии, нанесения по меньшей мере некоторого количества образца указанной отобранной колонии микроорганизмов на мишень и переноса указанной мишени с указанным образцом в аппарат, осуществляющий МАЛДИ, для идентификации указанного образца указанной колонии микроорганизмов. На самом деле, проблемы, указанные выше, по большей части возникают по причине того, что этапы выполняются вручную и, соответственно, данные этапы обуславливают нежелательные вариации и ошибки, что приводит к некорректным результатам, полученным с помощью инструмента МАЛДИ, дополнительным расходам и потере времени. За счет автоматизации каждой из стадий данные проблемы возможно преодолеть, по крайней мере, в значительной степени. В настоящей области изобретения подразумевалось, что, по меньшей мере, некоторые из данных этапов возможно осуществлять только вручную, однако настоящее изобретение, напротив, впервые обеспечивает возможность автоматизировать все этапы, необходимые для локализации и отбора колонии микроорганизмов, а также идентификации микроорганизмов в указанной отобранной колонии с помощью МАЛДИ.
В одном из вариантов осуществления способа согласно настоящему изобретению нанесение по меньшей мере некоторого количества указанного образца указанной отобранной колонии микроорганизмов на мишень осуществляется непосредственно путем размещения указанного полученного образца отобранной колонии микроорганизмов на указанную мишень. При непосредственном нанесении образца на мишень отсутствует необходимость в предшествующем приготовлении суспензии указанного образца, что позволяет избежать всех проблем, которые могут возникнуть при приготовлении данной суспензии. Предпочтительно способ включает дополнительный автоматизированный этап нанесения капли раствора матрицы МАЛДИ на часть образца, нанесенную на мишень.
В альтернативном варианте осуществления способа согласно изобретению этап нанесения по меньшей мере некоторого количества указанного образца отобранной колонии микроорганизмов на мишень осуществляется посредством автоматизированных этапов переноса указанного полученного образца в суспензионную пробирку, содержащую некоторое количество суспензионной среды, получения капли данной суспензии образца и переноса указанной капли суспензионного образца на указанную мишень. С помощью полностью автоматизированного получения суспензии изобретение обеспечивает точный и воспроизводимый способ применения суспензий для идентификации микроорганизмов с помощью МАЛДИ. В частности, если способ дополнительно включает автоматизированный этап нанесения капли раствора матрицы МАЛДИ на указанную каплю суспензионного образца, нанесенную на мишень, способ согласно изобретению превосходно подходит для описания микроорганизмов. Наилучшие результаты анализа можно получить в рамках дополнительного варианта осуществления способа согласно изобретению, при котором указанной капле суспензии образца, нанесенной на мишень, позволяют высохнуть перед нанесением раствора матрицы МАЛДИ. Данный альтернативный способ применения суспензии также чрезвычайно полезен в случае, если на образце колонии микроорганизмов необходимо провести другой тест или анализ. Данный дополнительный анализ может в особенности воспроизводимым и эффективным образом быть реализован в одном из вариантов осуществления способа согласно изобретению, в котором способ дополнительно включает автоматизированные этапы получения второй капли указанной суспензии образца, нанесение указанной второй капли суспензии образца на тестовую чашку для культивирования и перемещение указанной тестовой культуральной чашки в аппарат для осуществления анализа восприимчивости к антибиотикам или другого дополнительного анализа. Следовательно, способ согласно изобретению возможно применять для автоматического получения или забора образца, который возможно поместить в доступные инструменты для идентификации и анализа восприимчивости к антибиотикам (ID/AST - identification and antibiotic susceptibility test). Инструмент для идентификации и анализа восприимчивости к антибиотикам включает, но не ограничивается, ВАСТЕС™, Phoenix, MGIT, BacT/Alert.
Настоящее изобретение также обеспечивает возможность осуществления таких дополнительных анализов в случае, если из полученного образца не готовят суспензию. В данной ситуации наиболее предпочтительный вариант осуществления способа согласно изобретению дополнительно включает автоматизированные этапы получения второго образца колонии микроорганизмов с чашки для культивирования; перемещения указанного второго образца указанной отобранной колонии микроорганизмов; нанесения по меньшей мере некоторого количества указанного второго образца указанной отобранной колонии микроорганизмов на тестовую чашку для культивирования и перемещения указанной тестовой чашки для культивирования в аппарат для осуществления теста для анализа восприимчивости к антибиотикам или другого дополнительного анализа.
Поскольку при описании и идентификации микроорганизмов нормальным является то, что на чашке для культивирования вырастает множество колоний, помимо прочего является важным, чтобы образец был получен из интересующей колонии. Если образцы взяты из не интересующих колоний, нарушается эффективное использование времени и инструмента МАЛДИ. Согласно сведениям заявителя, до сих пор не существует автоматизированного способа или устройства для дифференцирования интересующих и не интересующих колоний. Однако способ дифференцирования колоний может являться, по меньшей мере, частично автоматизированным при сохранении высокой уверенности в корректной дифференциации в варианте осуществления способа согласно изобретению, согласно которому способ включает, перед автоматизированным этапом локализации и отбора колонии микроорганизмов на чашке для культивирования, этап обеспечения чашки для культивирования, на которой имеется некоторое количество колоний микроорганизмов, получения исходного изображения указанной чашки для культивирования, включающего все колонии микроорганизмов, отображения указанного исходного изображения указанной чашки для культивирования, включающего все колонии микроорганизмов, на дисплей и отбора по меньшей мере одной колонии микроорганизмов на указанном исходном изображении. Таким образом, исследователь или аналитик может выбрать интересующие колонии, основываясь на исчерпывающем образовании и знании. В конкретном варианте осуществления изобретения указанную чашку для культивирования обеспечивают индивидуальным идентификатором, идентифицирующим указанную чашку, например штрихкодом, и способ дополнительно включает этап хранения указанного исходного изображения указанной чашки для культивирования, включающего все колонии, хранения информации, относящейся, по меньшей мере, к одной отобранной колонии микроорганизмов, хранения указанного идентификатора указанной чашки для культивирования в памяти компьютера центрального управления. В дополнительном варианте осуществления изобретения исследователь или аналитик может вручную ввести инструкции по обработке касательно обработки, которой следует подвергнуть отобранную колонию микроорганизмов на указанной чашке для культивирования, указанные инструкции по обработке хранятся в указанной памяти указанного компьютера центрального управления для последующего применения.
В дополнительном варианте осуществления способ включает автоматизированные этапы помещения указанной чашки для культивирования на подставку для чашки для культивирования, получения изображения указанной чашки для культивирования, помещенной на указанную подставку, получения идентификатора указанной чашки для культивирования, сравнения полученного изображения, полученного с помощью устройства визуализации указанного устройства с инструментом для отбора колоний, с хранящимся исходным изображением указанной чашки для культивирования для получения информации о локализации отобранной колонии микроорганизмов и, возможно, для получения инструкции по обработке в отношении обработок, которые необходимо осуществить с указанной отобранной колонией микроорганизмов. Путем сравнения изображения чашки для культивирования, закрепленной в устройстве с инструментом для отбора колоний, с исходным изображением обеспечивается возможность автоматического получения информации о расположении отобранных колоний, например, с помощью компьютеризированного сравнения изображений.
Еще в одном дополнительном варианте осуществления способа согласно изобретению способ включает этап автоматизированного получения суспензии образца микроорганизмов, включающего следующие этапы:
- обеспечение первого инструмента для отбора колоний и обеспечение позиционирующего устройства с держателем инструмента для отбора колоний для крепления инструмента для отбора колоний, при этом указанное позиционирующее устройство устанавливают с обеспечением возможности установки инструмента для отбора колоний в начальное положение над полученным местоположением отобранной колонии микроорганизмов на чашке для культивирования и для автоматического опускания и подъема инструмента для отбора колоний по направлению к чашке для культивирования и от нее, а также для установки инструмента для отбора колоний в положение переноса, соответственно;
- установка указанного первого инструмента для отбора колоний в указанный держатель инструмента для отбора колоний позиционирующего устройства;
- с помощью указанного позиционирующего устройства установка первого инструмента для отбора колоний в начальное положение над полученным местоположением отобранной колони микроорганизмов на чашке для культивирования, автоматическое опускание первого инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора образца указанного микроорганизма, автоматический подъем первого инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса;
- обеспечение держателя суспензионной пробирки для крепления суспензионной пробирки;
- установка суспензионной пробирки в держатель суспензионной пробирки;
- обеспечение автоматического дозатора суспензионной среды для автоматического дозирования суспензионной среды в суспензионную пробирку, закрепленную в держателе суспензионной пробирки;
- с помощью автоматического дозатора автоматическая подача исходного количества суспензионной среды в суспензионную пробирку, закрепленную в держателе суспензионной пробирки;
- обеспечение устройства для переноса для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе для суспензионной пробирки, а также для опускания и подъема инструмента для отбора колоний в и из суспензионной среды, содержащейся в суспензионной пробирке, а также для установки инструмента для отбора колоний в положение ожидания над суспензионной пробиркой, закрепленной в держателе для суспензионной пробирки, соответственно;
- с помощью указанного устройства для переноса автоматический перенос указанного первого инструмента для отбора колоний с образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе суспензионной пробирки, опускание указанного первого инструмента для отбора колоний с образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке; с помощью устройства для переноса осуществление колебательных движений первым инструментом для отбора колоний путем линейного вертикального движения в период времени, когда первый инструмента для отбора колоний с указанным образцом микроорганизма погружен в суспензионную среду; и после того, как указанный период времени истек, поднятие первого инструмента для отбора колоний из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания;
- обеспечение турбидиметра, производящего измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе для суспензионной пробирки;
- по меньшей мере после того, как период времени, в течение которого инструмент для отбора колоний колеблется, истек, измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечение значения окончательного измерения, указывающего на измеренную мутность;
- обеспечение контроллера, соединенного с позиционирующим устройством, устройством для переноса, автоматическим дозатором суспензионной среды и турбидиметром, для автоматического управления движением позиционирующего устройства, движением устройства для переноса, работой автоматического дозатора суспензионной среды и работой турбидиметра, соответственно;
- с помощью указанного контроллера:
a) определение, является ли значение окончательного измерения больше первого порогового значения, ранее сохраненного в памяти контроллера, если да, то выполнение этапа b); или является ли значение окончательного измерения равным или меньше первого порогового значения, или равным или больше второго порогового значения, ранее сохраненного в памяти контроллера, указанное первое пороговое значение является равным или больше второго порогового значения, и если да, то выполнение этапа с); или является ли значение окончательного измерения меньше второго порогового значения, если да, то выполнения этапа d);
b) контролирование автоматического дозатора суспензионной среды для подачи дополнительного количества суспензионной среды в суспензионную пробирку;
c) обеспечение сигнала о том, что суспензионную пробирку с суспензионной средой возможно удалить из держателя суспензионной пробирки для дальнейшей обработки; или
d) обеспечение дополнительного инструмента для отбора колоний; установка дополнительного инструмента для отбора колоний в держатель инструмента для отбора колоний позиционирующего устройства; с помощью позиционирующего устройства установка дополнительного инструмента для отбора колоний в начальное положение над чашкой для культивирования, автоматическое опускание дополнительного инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора дополнительного образца указанного микроорганизма, автоматический подъем дополнительного инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса; с помощью указанного устройства для переноса происходит автоматический перенос дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе суспензионной пробирки, опускание дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке; с помощью устройства для переноса осуществление колебательных движений дополнительным инструментом для отбора колоний путем линейного вертикального движения в период времени, когда дополнительный инструмент для отбора колоний с дополнительным образцом микроорганизма погружен в суспензионную среду; и после того, как указанный период времени истек, поднятие дополнительного инструмента для отбора колоний из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания; по меньшей мере, после того, как период времени, в течение которого дополнительный инструмент для отбора колоний колеблется, истек, измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечение дополнительного значения окончательного измерения, указывающего на измеренную мутность; и осуществление этапа а).
Таким образом, можно обеспечить суспензию образца микроорганизма в продвинутом автоматическом режиме, в то время как с помощью контроллера и турбидиметра возможно подготовить суспензионную пробирку, содержащую суспензионную среду, которая включает количество микроорганизма, которое всегда является достаточным (и воспроизводимым), для выполнения корректного анализа микроорганизма.
В варианте осуществления способа автоматического приготовления суспензии образца микроорганизмов согласно изобретению контроллер устанавливают таким образом, что этап измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, установленной в держателе суспензионной пробирки, с помощью турбидиметра дополнительно осуществляется в течение периода времени, во время которого инструмент для отбора колоний колеблется, при этом турбидиметр устанавливают таким образом, чтобы обеспечить контроллеру значение измерения, указывающего на значение мутности, в режиме реального времени в течение периода времени, во время которого колеблется инструмент для отбора колоний. Таким образом, возможно обеспечить чрезвычайно быстрое автоматическое определение количества микроорганизма в суспензии. В частности, если во время колебания значение измерения мутности в режиме реального времени равно или меньше первого порогового значения и равно или больше второго порогового значения, контроллер контролирует движение устройства для переноса таким образом, что инструмент для отбора колоний поднимается в положение ожидания, и контроллер дополнительно обеспечивает сигнал о том, что суспензионную пробирку с суспензией можно удалить из держателя суспензионной пробирки для дальнейшей обработки. Таким образом, колебание инструмента для отбора колоний прекращается, когда суспензионная среда содержит достаточное количество микроорганизмов, так что способ можно осуществить очень эффективно с точки зрения времени.
Взаимное расположение инструмента для отбора колоний и датчиков турбидиметра таково, что во время колебания инструмента для отбора колоний инструмент для отбора колоний не препятствует прохождению турбидиметра.
В дополнительном варианте осуществления способа автоматического получения суспензии образца микроорганизмов согласно изобретению контроллер устанавливают таким образом, чтобы управлять турбидиметром таким образом, чтобы этап измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра начинался прежде, чем инструмент для отбора колоний погрузится в суспензионную среду, содержащуюся в суспензионной пробирке. Таким образом, например, возможно проверить, не является ли исходная применяемая суспензионная среда контаминированной. Кроме того, это обеспечивает определение начального значения мутности, что является полезным в определении значения окончательного измерения.
В еще одном дополнительном варианте осуществления способа автоматического получения суспензии образца микроорганизмов согласно изобретению способ дополнительно включает этап обеспечения в качестве держателя суспензионной пробирки для закрепления суспензионной пробирки вращающегося держателя суспензионной пробирки для вращения суспензионной пробирки, закрепленной во вращающемся держателе суспензионной пробирки, этап установки контроллера таким образом, что он присоединен к вращающемуся держателю суспензионной пробирки для управления вращением держателя суспензионной пробирки, и этап расположения контроллера таким образом, что держатель суспензионной пробирки вращается во время измерения мутности суспензионной среды, содержащейся в суспензионной пробирке. Данное вращение суспензионной пробирки обеспечивает возможность осуществления измерения мутности в нескольких положениях внутри суспензионной пробирки, расположенных на расстоянии относительно друг друга по траектории вращения, что приводит к более точному окончательному измерению мутности суспензии. Вращение как таковое не является необходимым для высвобождения образца из инструмента для отбора колоний, колебательного линейного вертикального движения инструмента для отбора колоний более чем достаточно для высвобождения образца.
Хотя возможно применять дополнительное устройство с инструментом для отбора колоний, которое отличатся от первого устройства с инструментом для отбора колоний, способ можно осуществить в более экономном варианте, в котором на этапе d) первый инструмент для отбора колоний обеспечивают в качестве дополнительного инструмента для отбора колоний; и установка указанного дополнительного инструмента для отбора колоний в указанном держателе инструмента для отбора колоний позиционирующего устройства осуществляют с помощью устройства для переноса под управлением контроллера.
В еще одном дополнительном варианте осуществления способа автоматического получения суспензии образца микроорганизмов согласно изобретению дополнительное количество суспензионной среды определяется контроллером на основании начального количества суспензионной среды, значения окончательного измерения и значения первого и/или второго порогового значения. Это обеспечивает возможность применять только необходимое и достаточное количество суспензионной среды, и таким образом в данном варианте осуществления можно применять минимально возможное количество суспензионной среды.
Поскольку согласно способу автоматического получения суспензии образца микроорганизмов согласно изобретению инструмент для отбора колоний колеблется путем линейного вертикального движения по отношению к суспензионной пробирке, размер суспензионной пробирки может быть относительно малым. Это обеспечивает возможность того, что в варианте осуществления способа согласно изобретению контроллер возможно установить для управления автоматическим дозатором суспензионной среды таким образом, что подаваемое начальное количество составляет от около 0,5 до 2 мл, предпочтительно около 1 мл. Данное относительно малое количество суспензионной среды является достаточным для получения правильной суспензии образца микроорганизмов. В данном способе автоматического получения суспензии образца микроорганизмов является возможным применять в качестве суспензионной пробирки суспензионную пробирку, имеющую, по существу, круглое поперечное сечение, имеющую диаметр от около 6 до около 12 мм, предпочтительно около 10 мм, являющуюся относительно небольшой по сравнению с обычными пробирками, имеющими диаметр 16 мм. С данным относительно небольшим размером суспензионной пробирки корректное высвобождение образца из инструмента для отбора колоний достигается, если контроллер устанавливают для управления колебанием устройства для переноса таким образом, что инструмент для отбора колоний колеблется частотой от около 5 Гц до около 120 Гц, предпочтительно от около 30 Гц до около 90 Гц, наиболее предпочтительно около 50 Гц. Предпочтительно контроллер устанавливают для управления колебанием устройства для переноса таким образом, что инструмент для отбора колоний колеблется с амплитудой от около 0,5 мм до около 4 мм, предпочтительно от 2 мм до около 3 мм, что обеспечивает оптимальное высвобождение образца из инструмента для отбора колоний. В случае, если контроллер устанавливают для управления колебанием устройства для переноса таким образом, что период времени, во время которого инструмент для отбора колоний колеблется, составляет от около 3 секунд до около 10 секунд, предпочтительно около 6 секунд, оказывается, что практически во всех случаях весь образец может быть высвобожден из инструмента для отбора колоний.
Значения частоты, амплитуды и длительности зависят от свойств конкретного микроорганизма и, например, его адгезии с инструментом для отбора колоний. На основе осмотра путем визуализации можно сделать вывод о том, произошло ли высвобождение по меньшей мере большей части образца из инструмента для отбора колоний в результате первого применения указанных предпочтительных значений. Если некоторое количество образца все еще осталось на инструменте для отбора колоний, вертикальное колебание повторяют в заданных диапазонах при различных значениях.
Автоматический способ получения суспензии образца микроорганизмов согласно изобретению можно обеспечить, если способ дополнительно включает этап обеспечения автоматической установки чашки для культивирования и автоматического устройства для установки и удаления чашки для культивирования, содержащей указанный микроорганизм на подставку и с нее, соответственно. Контроллер, следовательно, устанавливают таким образом, что он присоединен к автоматическому устройству для установки и удаления чашки для культивирования для управления работой автоматического устройства для установки и удаления чашки для культивирования. Данным образом установку чашки для культивирования, содержащей указанный микроорганизм, на подставку можно осуществить автоматически под управлением контроллера. Дополнительная автоматизация реализуется путем обеспечения автоматического устройства для установки и удаления суспензионной пробирки для автоматической установки и удаления суспензионной пробирки в держатель суспензионной пробирки и из него, соответственно. Таким образом, контроллер устанавливают так, что он присоединен к автоматическому устройству для установки и удаления суспензионной пробирки для управления работой автоматического устройства для установки и удаления суспензионной пробирки таким образом, что установку суспензионной пробирки в держатель суспензионной пробирки возможно осуществлять автоматически под управлением контроллера. Так, предпочтительно, контроллер устанавливают таким образом, что имеется возможность автоматически удалить чашку для культивирования с подставки с помощью автоматического устройства для установки и удаления чашки для культивирования только после обеспечения сигнала о том, что суспензионную пробирку с суспензией можно удалить из держателя суспензионной пробирки для дальнейшей обработки. Более того, также предпочтительно, контроллер устанавливают таким образом, что держатель суспензионной пробирки автоматически удаляется из держателя суспензионной пробирки с помощью автоматического устройства для установки и удаления суспензионной пробирки только после обеспечения сигнала о том, что суспензионную пробирку с суспензией возможно удалить из держателя суспензионной пробирки для дальнейшей обработки.
Еще в одном дополнительном варианте осуществления способа согласно изобретению способ включает этап обеспечения идентификационной маркировки на суспензионной пробирке, а также этап хранения идентификационной маркировки указанной суспензионной пробирки вместе с параметрами суспензии с привязкой к идентификатору чашки для культивирования, с которой отобранная колония микроорганизмов была получена, в памяти указанного компьютера центрального управления, способ может не только осуществляться автоматически чрезвычайно эффективным способом, но также улучшается корректная и быстрая обработка результатов.
Еще в одном дополнительном варианте осуществления способа согласно изобретению, где инструкции по обработке для отобранной колонии микроорганизмов указывают непосредственно нанести указанный полученный образец указанной отобранной колонии микроорганизмов на указанную мишень, способ включает следующие автоматизированные этапы: обеспечение первого инструмента для отбора колоний и обеспечение позиционирующего устройства с держателем инструмента для отбора колоний для закрепления инструмента для отбора колоний, указанное позиционирующее устройство устанавливают для установки инструмента для отбора колоний в начальное положение над полученным положением отобранной колонии микроорганизмов на чашке для культивирования и для автоматического опускания и подъема инструмента для отбора колоний по направлению к чашке для культивирования и от нее и для установки инструмента для отбора колоний в положение переноса, соответственно; установка указанного первого инструмента для отбора колоний в указанный держатель инструмента для отбора колоний позиционирующего устройства; с помощью указанного позиционирующего устройства установка первого инструмента для отбора колоний в начальное положение над полученным местоположением отобранной колонии микроорганизмов на чашке для культивирования, автоматическое опускание первого инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора образца указанного микроорганизма, автоматический подъем первого инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса; обеспечение держателя мишени для закрепления мишени, указанной мишени, имеющей множество точек нанесения; установка мишени в держатель мишени; обеспечение устройства для переноса для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства в положение над одной из точек нанесения мишени и для опускания инструмента для отбора колоний таким образом, что образец колонии микроорганизмов, присутствующий на инструменте для отбора колоний, вступает в контакт с мишенью, передвижение инструмента для отбора колоний в плоскости, параллельной плоскости мишени, таким образом, что образец колонии микроорганизмов наносится на точку нанесения, более конкретно, покрывая не более чем около половины одной из точек нанесения мишени, а также подъем указанного инструмента для отбора колоний от мишени. Путем осуществления автоматического нанесения образца можно обеспечить более воспроизводимое и точное нанесение образца на точку нанесения, чем при ручном нанесении образца. Более того, представляется, что в случае, когда образец покрывает не более чем около половины одной из точек нанесения мишени, результаты анализа, полученные с помощью инструмента МАЛДИ, части точки нанесения, которая изначально не была покрыта образцом, являются неожиданно чрезвычайно более точными, чем результаты анализа, полученные с помощью инструмента МАЛДИ, части точки нанесения, которая изначально была покрыта образцом. При условии, что авторы изобретения не хотят быть ограниченными конкретной теорией, предполагается, что кристаллизация, которая происходит после того, как каплю материала матрицы наносят поверх образца, покрывающего часть точки нанесения, обеспечивает содержание некоторого количества образца на непокрытой образцом части точки нанесения и что данное количество является чрезвычайно подходящим для обеспечения превосходных результатов анализа. В альтернативном варианте осуществления способа согласно изобретению, в котором, в случае если инструкции по обработке для отобранной колонии микроорганизмов указывают получить каплю из указанной суспензии образца и перенести указанную каплю на указанную мишень, способ включает следующие автоматизированные этапы: обеспечение дозирующего инструмента в указанном устройстве с инструментом для отбора колоний и обеспечение позиционирующего устройства с держателем дозирующего инструмента для закрепления указанного дозирующего инструмента, указанное позиционирующее устройство устанавливают для установки дозирующего инструмента в начальное положение над суспензионной пробиркой и для автоматического опускания и подъема в суспензию и из нее и для установки дозирующего инструмента в положение переноса, соответственно; установка указанного дозирующего инструмента в указанный держатель дозирующего инструмента позиционирующего устройства; с помощью указанного позиционирующего устройства установка дозирующего инструмента в начальное положение над суспензионной пробиркой, опускание дозирующего инструмента в суспензию в указанной суспензионной пробирке, применение дозирующего инструмента для забора некоторого количества суспензии, подъем дозирующего инструмента с указанным количеством суспензии в положение переноса; указанный дозирующий инструмент включает герметичную камеру, закрытую контролируемым клапаном, для того, чтобы вмещать некоторое количество суспензионной среды; обеспечение держателя мишени для закрепления мишени, указанной мишени, имеющей множество точек нанесения; установка мишени в держатель мишени; обеспечение устройства для переноса для автоматического переноса дозирующего инструмента из положения переноса в положение над одной из точек нанесения мишени и для опускания дозирующего инструмента на заранее определенное расстояние над мишенью, подача давления в камеру до значения давления в диапазоне от около 0,5 бар до 1,1 бар (от 50 до 110 кПа), а также открытие клапана на такое время, за которое каплю суспензии объемом в диапазоне от около 0,5 до 3,0 мкл наносят на точку нанесения, более конкретно, покрытие не более чем приблизительно половины указанной одной из точек нанесения на мишени; и подъем указанного дозирующего инструмента в направлении от мишени. В зависимости от свойств конкретного микроорганизма, например его вязкости, значение давления и время открытия возможно регулировать, с тем чтобы получить небольшую каплю суспензии, которую возможно воспроизводимо повторять и которую в качестве результата автоматического процесса возможно точно наносить на мишень.
Для того чтобы избежать перекрестной контаминации, в предпочтительном варианте осуществления способа согласно изобретению форма дозирующего инструмента, более конкретно, его дозирующий наконечник является таким, что нанесение капли суспензии на мишень осуществляется без брызг. Оказалось, что в зависимости от типа применяемого микроорганизма, и в особенности от его вязкости, помимо выбора давления в указанном диапазоне и времени открытия клапана в указанном диапазоне, подходящая форма дозирующего инструмента обеспечивает возможность нанесения капли суспензии без брызг.
В дополнительном варианте осуществления способа согласно изобретению, в котором способ включает обеспечение идентификационной маркировки мишени и, возможно, обеспечение идентификационной маркировки точек нанесения указанной мишени и этап хранения идентификационной маркировки указанной мишени и точек нанесения вместе с характеристиками суспензии с привязкой к идентификатору чашки для культивирования, с которой отобранная колония микроорганизмов была получена, в памяти указанного компьютера центрального управления, способ может не только осуществляться автоматически чрезвычайно эффективным способом, но также улучшается корректная и быстрая обработка результатов.
Настоящее изобретение дополнительно относится к способу автоматического получения суспензии образца микроорганизмов, указанный способ включает следующие этапы:
- обеспечение подставки для чашки для культивирования, содержащей указанный микроорганизм;
- установка чашки для культивирования, содержащей указанный микроорганизм, на подставку;
- обеспечение первого инструмента для отбора колоний и обеспечение позиционирующего устройства с держателем инструмента для отбора колоний для закрепления инструмента для отбора колоний, указанное позиционирующее устройство устанавливают для установки инструмента для отбора колоний в начальное положение над чашкой для культивирования и для автоматического опускания и подъема инструмента для отбора колоний по направлению к чашке для культивирования и от нее и для установки инструмента для отбора колоний в положение переноса, соответственно;
- установка указанного первого инструмента для отбора колоний в указанный держатель инструмента для отбора колоний позиционирующего устройства;
- с помощью указанного позиционирующего устройства установка первого инструмента для отбора колоний в начальное положение над чашкой для культивирования, автоматическое опускание первого инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора образца указанного микроорганизма, автоматический подъем первого инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса;
- обеспечение держателя суспензионной пробирки для закрепления суспензионной пробирки;
- установка суспензионной пробирки в держателе суспензионной пробирки;
- обеспечение автоматического дозатора суспензионной среды для автоматического дозирования суспензионной среды в суспензионную пробирку, закрепленную в держателе суспензионной пробирки;
- с помощью автоматического дозатора автоматическая подача исходного количества суспензионной среды в суспензионную пробирку, закрепленную в держателе суспензионной пробирки;
- обеспечение устройства для переноса для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе для суспензионной пробирки, а также для опускания и подъема инструмента для отбора колоний в и из суспензионной среды, содержащейся в суспензионной пробирке, а также для установки инструмента для отбора колоний в положение ожидания над суспензионной пробиркой, закрепленной в держателе суспензионной пробирки, соответственно;
- с помощью устройства для переноса автоматический перенос указанного первого инструмента для отбора колоний с образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе суспензионной пробирки, опускание указанного первого инструмента для отбора колоний с образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке; с помощью устройства для переноса осуществление колебательных движений первым инструментом для отбора колоний путем линейного вертикального движения в период времени, когда первый инструмент для отбора колоний с указанным образцом микроорганизма погружен в суспензионную среду; и после того, как указанный период времени истек, поднятие первого инструмента для отбора колоний из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания;
- обеспечение турбидиметра, производящего измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе суспензионной пробирки;
- по меньшей мере, после того, как период времени, в течение которого инструмент для отбора колоний колеблется, истек, измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечение значения окончательного измерения, указывающего на измеренную мутность;
- обеспечение контроллера, соединенного с позиционирующим устройством, устройством для переноса, автоматическим дозатором суспензионной среды и турбидиметром, для автоматического управления движением позиционирующего устройства, движением устройства для переноса, работой автоматического дозатора суспензионной среды и работой турбидиметра, соответственно;
- с помощью указанного контроллера:
а) определение, является ли значение окончательного измерения выше первого порогового значения, ранее сохраненного в памяти контроллера, если да, то контроллер устанавливают для выполнения этапа b); или является ли значение окончательного измерения равным или меньше первого порогового значения, или равным или больше второго порогового значения, ранее сохраненного в памяти контроллера, является ли указанное первое пороговое значение равным или больше второго порогового значения, и если да, то контроллер устанавливают для выполнения этапа с); или является ли значение окончательного измерения меньше второго порогового значения, если да, то выполнения этапа d);
b) контролирование автоматического дозатора суспензионной среды для подачи дополнительного количества суспензионной среды в суспензионную пробирку;
c) обеспечение сигнала о том, что суспензионную пробирку с суспензионной средой можно удалить из держателя суспензионной пробирки для дальнейшей обработки; или
d) обеспечение дополнительного инструмента для отбора колоний; установка указанного дополнительного инструмента для отбора колоний в держатель инструмента для отбора колоний позиционирующего устройства; с помощью указанного позиционирующего устройства установка дополнительного инструмента для отбора колоний в начальное положение над чашкой для культивирования, автоматическое опускание дополнительного инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора дополнительного образца указанного микроорганизма, автоматический подъем дополнительного инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса; с помощью указанного устройства для переноса автоматический перенос указанного дополнительного инструмента для отбора колоний с образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе суспензионной пробирки, опускание указанного дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке; с помощью устройства для переноса осуществление колебательных движений дополнительным инструментом для отбора колоний путем линейного вертикального движения в период времени, когда дополнительный инструмент для отбора колоний с указанным дополнительным образцом микроорганизма погружен в суспензионную среду; и после того, как указанный период времени истек, поднятие дополнительного для отбора колоний инструмента из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания; по меньшей мере, после того, как период времени, в течение которого дополнительный для отбора колоний инструмент колеблется, истек, измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечение дополнительного значения окончательного измерения, указывающего на измеренную мутность; и осуществление этапа а).
Таким образом, можно приготовить суспензию образца микроорганизма в продвинутом автоматическом режиме, в то время как с помощью контроллера и турбидиметра возможно обеспечить суспензионную пробирку, содержащую суспензионную среду, которая включает количество микроорганизма, которое всегда является достаточным (и воспроизводимым), для выполнения корректного анализа микроорганизма.
В дополнительном варианте осуществления способа автоматического приготовления суспензии образца микроорганизмов согласно изобретению контроллер устанавливают таким образом, что этап измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, установленной в держателе суспензионной пробирки, с помощью турбидиметра дополнительно осуществляется в течение периода времени, во время которого инструмент для отбора колоний колеблется, при этом турбидиметр устанавливают таким образом, чтобы обеспечить контроллеру значение измерения, указывающего на значение мутности, в режиме реального времени в течение периода времени, во время которого колеблется инструмент для отбора колоний. Таким образом, можно обеспечить чрезвычайно быстрое автоматическое определение количества микроорганизма в суспензии. В частности, если во время колебания значение измерения мутности в режиме реального времени равно или меньше первого порогового значения и равно или больше второго порогового значения, контроллер контролирует движение устройства для переноса таким образом, что инструмент для отбора колоний поднимается в положение ожидания, и контроллер дополнительно обеспечивает сигнал о том, что суспензионную пробирку с суспензией можно удалить из держателя суспензионной пробирки для дальнейшей обработки.
В дополнительном варианте осуществления способа автоматического получения суспензии образца микроорганизмов согласно изобретению контроллер устанавливают так, чтобы контролировать турбидиметр таким образом, чтобы этап измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра начинался прежде, чем инструмент для отбора колоний погрузится в суспензионную среду, содержащуюся в суспензионной пробирке. Таким образом, например, возможно проверить, не является ли исходная применяемая суспензионная среда загрязненной. Это, например, возможно выполнить путем осуществления измерения мутности суспензионной пробирки и сравнения полученного значения с предопределенным значением, указывающим на то, что суспензия не является загрязненной. В случае если разница превышает пороговое значение, то, например, возможна подача предупреждающего сигнала, указывающего на то, что суспензия загрязнена.
В еще одном дополнительном варианте осуществления способа автоматического получения суспензии образца микроорганизмов согласно изобретению способ дополнительно включает этап обеспечения в качестве держателя суспензионной пробирки для закрепления суспензионной пробирки вращающегося держателя суспензионной пробирки для вращения суспензионной пробирки, закрепленной во вращающемся держателе суспензионной пробирки, этап установки контроллера таким образом, что он присоединен к вращающемуся держателю суспензионной пробирки для управления вращением держателя суспензионной пробирки, и этап расположения контроллера таким образом, что держатель суспензионной пробирки вращается во время измерения мутности суспензионной среды, содержащейся в суспензионной пробирке. Данное вращение суспензионной пробирки обеспечивает возможность осуществления измерения мутности в нескольких положениях внутри суспензионной пробирки, расположенных на расстоянии относительно друг друга по траектории вращения, что приводит к более точному окончательному измерению мутности суспензии. Вращение как таковое не является необходимым для высвобождения образца из инструмента для отбора колоний, колебательного линейного вертикального движения инструмента для отбора колоний более чем достаточно для высвобождения образца.
Хотя возможно применять дополнительный инструмент для отбора колоний, который отличается от первого инструмента для отбора колоний, способ можно осуществить в более экономном варианте, в котором на этапе d) первый инструмент для отбора колоний обеспечивают в качестве дополнительного инструмент для отбора колоний; и установка указанного дополнительного инструмента для отбора колоний в указанном держателе инструмента для отбора колоний позиционирующего устройства осуществляют с помощью устройства для переноса под управлением контроллера.
В еще одном дополнительном варианте осуществления способа автоматического получения суспензии образца микроорганизмов согласно изобретению дополнительное количество суспензионной среды определяется контроллером на основании начального количества суспензионной среды, значения окончательного измерения и значения первого и/или второго порогового значения. Это обеспечивает возможность применять только необходимое и достаточное количество суспензионной среды, и таким образом в данном варианте осуществления возможно применять минимально возможное количество суспензионной среды. В случае если измеренное значение указывает на то, что количество микроорганизмов является слишком малым, система контроля управляет инструмент для отбора колоний таким образом, чтобы получить дополнительный образец из той же самой отобранной колонии, и процесс повторяют.
Поскольку согласно способу автоматического получения суспензии образца микроорганизмов согласно изобретению инструмент для отбора колоний колеблется путем линейного вертикального движения по отношению к суспензионной пробирке, размер суспензионной пробирки может быть относительно малым. Это обеспечивает возможность того, что в варианте осуществления способа согласно изобретению контроллер возможно установить для управления автоматическим дозатором суспензионной среды таким образом, что подаваемое начальное количество составляет около от 0,5 до 2 мл, предпочтительно около 1 мл. Данное относительно малое количество суспензионной среды является достаточным для получения правильной суспензии образца микроорганизмов. В данном способе автоматического получения суспензии образца микроорганизмов является возможным применять в качестве суспензионной пробирки суспензионную пробирку, имеющую, по существу, круглое поперечное сечение, имеющую диаметр от около 6 до около 12 мм, предпочтительно около 10 мм, являющуюся относительно небольшой по сравнению с обычными пробирками, имеющими диаметр 16 мм. С данным относительно небольшим размером суспензионной пробирки корректное высвобождение образца из инструмента для отбора колоний достигается, если контроллер устанавливают для управления колебанием устройства для переноса таким образом, что инструмент для отбора колоний колеблется частотой от около 5 Гц до около 120 Гц, предпочтительно от около 30 Гц до около 90 Гц, наиболее предпочтительно около 50 Гц. Предпочтительно контроллер устанавливают для управления колебанием устройства для переноса таким образом, что инструмент для отбора колоний колеблется с амплитудой от около 0,5 мм до около 4 мм, предпочтительно от 2 мм до около 3 мм, что обеспечивает оптимальное высвобождение образца из инструмента для отбора колоний. В случае если контроллер устанавливают для управления колебанием устройства для переноса таким образом, что период времени, во время которого инструмент для отбора колоний колеблется, составляет от около 3 секунд до около 10 секунд, предпочтительно около 6 секунд, оказывается, что практически во всех случаях весь образец может быть высвобожден из инструмента для отбора колоний.
Изобретение дополнительно относится к аппарату для автоматического получения суспензии образца микроорганизмов для осуществления способа локализации и отбора колонии микроорганизмов на чашке для культивирования и идентификации микроорганизмов в указанной отобранной колонии с помощью МАЛДИ или для осуществления этапа способа автоматического получения суспензии образца микроорганизмов согласно способам по изобретению, при этом указанный аппарат включает:
- подставку для чашки для культивирования, содержащую указанный микроорганизм;
- первый и дополнительный инструмент для отбора колоний и позиционирующее устройство с держателем инструмента для отбора колоний для закрепления инструмента для отбора колоний, при этом указанное позиционирующее устройство устанавливают для установки инструмента для отбора колоний в начальное положение над чашкой для культивирования и для автоматического опускания и подъема инструмента для отбора колоний по направлению к чашке для культивирования и от нее, а также для установки инструмента для отбора колоний в положение переноса, соответственно;
- держатель суспензионной пробирки для закрепления суспензионной пробирки;
- автоматический дозатор суспензионной среды для автоматического дозирования суспензионной среды в суспензионную пробирку, закрепленную в держателе суспензионной пробирки;
- устройство для переноса для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе для суспензионной пробирки, а также для опускания и подъема инструмента для отбора колоний в и из суспензионной среды, содержащейся в суспензионной пробирке, а также для установки инструмента для отбора колоний в положение ожидания над суспензионной пробиркой, закрепленной в держателе суспензионной пробирки, соответственно, указанное устройство для переноса дополнительно устанавливают для колебания инструмента для отбора колоний путем линейного вертикального движения в течение периода времени;
- турбидиметр для осуществления измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе суспензионной пробирки, и для обеспечения значения окончательного измерения, указывающего на измеренную мутность;
- контроллер, соединенный с позиционирующим устройством, устройством для переноса, автоматическим дозатором суспензионной среды и турбидиметром, для автоматического управления движением позиционирующего устройства, движением устройства для переноса, работой автоматического дозатора суспензионной среды и работой турбидиметра, соответственно;
- указанный контроллер устанавливают для:
a) определения, является ли значение окончательного измерения больше первого порогового значения, ранее сохраненного в памяти контроллера, если да, то контроллер устанавливают для выполнения этапа b); или является ли значение окончательного измерения равным или меньше первого порогового значения, или равным или больше второго порогового значения, ранее сохраненного в памяти контроллера, является ли указанное первое пороговое значение равным или больше второго порогового значения, и если да, то контроллер устанавливают для выполнения этапа с); или является ли значение окончательного измерения меньше второго порогового значения, если да, то контроллер устанавливают для выполнения этапа d);
b) контролирования автоматического дозатора суспензионной среды для подачи дополнительного количества суспензионной среды в суспензионную пробирку;
c) обеспечения сигнала о том, что суспензионную пробирку с суспензионной средой можно удалить из держателя суспензионной пробирки для дальнейшей обработки; или
d) установки указанного дополнительного инструмента для отбора колоний в держатель инструмента для отбора колоний позиционирующего устройства; с помощью указанного позиционирующего устройства установка дополнительного инструмента для отбора колоний в начальное положение над чашкой для культивирования, автоматическое опускание дополнительного инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора дополнительного образца указанного микроорганизма, автоматический подъем дополнительного инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса; с помощью указанного устройства для переноса автоматический перенос указанного дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, закрепленной в держателе суспензионной пробирки, опускание указанного дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке; с помощью устройства для переноса осуществления колебательных движений дополнительным инструментом для отбора колоний путем линейного вертикального движения в период времени, когда дополнительный инструмент для отбора колоний с указанным дополнительным образцом микроорганизма погружен в суспензионную среду; и после того, как указанный период времени истек, подъема дополнительного инструмента для отбора колоний из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания; по меньшей мере, после того, как период времени, в течение которого дополнительный инструмент для отбора колоний колеблется, истек, измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, закрепленной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечение дополнительного значения окончательного измерения, указывающего на измеренную мутность; и осуществления этапа а).
В дополнительном варианте осуществления аппарата согласно изобретению контроллер устанавливают таким образом, чтобы контролировать турбидиметр таким образом, чтобы измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра осуществлялось прежде, чем инструмент для отбора колоний погрузится в суспензионную среду, содержащуюся в суспензионной пробирке.
В еще одном дополнительном варианте осуществления аппарата согласно изобретению держатель суспензионной пробирки для закрепления суспензионной пробирки представляет собой вращающийся держатель суспензионной пробирки для вращения суспензионной пробирки, закрепленной во вращающемся держателе суспензионной пробирки, при этом контроллер устанавливают таким образом, что он присоединен к вращающемуся держателю суспензионной пробирки для управления вращением держателя суспензионной пробирки, и указанный контроллер устанавливают для вращения держателя суспензионной пробирки во время измерения мутности суспензионной среды, содержащейся в суспензионной пробирке.
В предпочтительном варианте осуществления аппарата согласно изобретению на этапе d) первый инструмент для отбора колоний обеспечивают в качестве дополнительного инструмента для отбора колоний; и указанный контроллер устанавливают для управления устройством для переноса для установки указанного первого инструмента для отбора колоний в указанном держателе инструмента для отбора колоний позиционирующего устройства.
Предпочтительно, контроллер устанавливают для определения дополнительного количества суспензионной среды на основе начального количества, значения окончательного измерения, а также значения первого и/или второго порогового значения. В частности, контроллер устанавливают для управления работой автоматического дозатора суспензионной среды таким образом, что подаваемое начальное количество составляет от около 0,5 до 2 мл, предпочтительно около 1 мл. В дополнительном варианте осуществления аппарата согласно изобретению контроллер устанавливают для управления колебанием устройства для переноса таким образом, что инструмент для отбора колоний колеблется частотой от около 5 Гц до около 120 Гц, предпочтительно от около 30 Гц до около 90 Гц, наиболее предпочтительно около 50 Гц. Дополнительно контроллер возможно установить для управления колебанием устройства для переноса таким образом, что инструмент для отбора колоний колеблется с амплитудой от около 0,5 мм до около 4 мм, предпочтительно от 2 мм до около 3 мм, и для управления колебанием устройства для переноса таким образом, что период времени, во время которого инструмент для отбора колоний колеблется, составляет от около 3 секунд до около 10 секунд, предпочтительно около 6 секунд.
В устройстве для автоматического получения суспензии образца микроорганизмов согласно изобретению суспензионная пробирка может иметь, по существу, круглое поперечное сечение диаметром от около 6 до около 12 мм, предпочтительно около 10 мм.
Полностью автоматическое устройство соответствует изобретению, если аппарат включает автоматическое устройство для установки и удаления чашки для культивирования для автоматической установки и удаления чашки для культивирования, содержащей указанный микроорганизм, на подставку и с нее, соответственно, указанный контроллер устанавливают таким образом, что его присоединяют к автоматическому устройству для установки и удаления для управления работой автоматического устройства для установки и удаления чашки для культивирования и для автоматической установки чашки для культивирования, содержащей указанный микроорганизм, на подставку, и, если аппарат включает автоматическое устройство для установки и удаления суспензионной пробирки для автоматической установки и удаления суспензионной пробирки в держатель суспензионной пробирки и из него, соответственно, указанный контроллер устанавливают таким образом, что его присоединяют к автоматическому устройству для установки и удаления суспензионной пробирки для управления работой автоматического устройства для установки и удаления суспензионной пробирки и для автоматической установки суспензионной пробирки в держатель суспензионной пробирки. В данном случае, предпочтительно, контроллер устанавливают таким образом, что имеется возможность автоматически удалить чашку для культивирования с подставки с помощью автоматического устройства для установки и удаления чашки для культивирования только после обеспечения сигнала о том, что суспензионную пробирку с суспензией возможно удалить из держателя суспензионной пробирки для дальнейшей обработки. Помимо этого, также предпочтительно, контроллер устанавливают таким образом, что держатель суспензионной пробирки автоматически удаляют из держателя суспензионной пробирки с помощью автоматического устройства для установки и удаления суспензионной пробирки только после обеспечения сигнала о том, что суспензионную пробирку с суспензией возможно удалить из держателя суспензионной пробирки для дальнейшей обработки.
Изобретение дополнительно относится к способу автоматического нанесения образца колонии микроорганизмов на точку нанесения матрицы для МАЛДИ, где способ включает этап нанесения образца колонии микроорганизмов на точку нанесения таким образом, что образец покрывает не более чем около половины одной из точек нанесения мишени. Показано, что в случае, когда образец покрывает не более чем около половины одной из точек нанесения мишени, результаты анализа, полученные с помощью инструмента МАЛДИ, части точки нанесения, которая изначально не была покрыта образцом, являются неожиданно чрезвычайно более точными, чем результаты анализа, полученные с помощью инструмента МАЛДИ, части точки нанесения, которая изначально была покрыта образцом. Предположительно, кристаллизация, которая происходит после того, как каплю материала матрицы наносят поверх образца, покрывающего часть точки нанесения, обеспечивает содержание некоторого количества образца на непокрытой образцом части точки нанесения, и данное количество является чрезвычайно подходящим для обеспечения превосходных результатов анализа. Физические или химические процессы, которые являются причиной данного эффекта, на данный момент являются неясными, но, возможно, появится большая ясность, когда будут известны фундаментальные процессы, лежащие в основе МАЛДИ. В одном из вариантов осуществления данного способа образец колонии микроорганизмов получают в форме суспензии, где образец суспензии наносят на точку нанесения на матрице в форме капли, имеющей объем в диапазоне от 0,5 до 3,0 мкл.
Изобретение также дополнительно относится к способу автоматического нанесения капли суспензии, включающей образец колонии микроорганизмов, в точку нанесения мишени МАЛДИ, где способ включает следующие автоматические этапы:
- обеспечение дозирующего инструмента в устройстве с инструментом для отбора колоний и обеспечение позиционирующего устройства с держателем дозирующего инструмента для закрепления указанного дозирующего инструмента, указанное позиционирующее устройство устанавливают для установки дозирующего инструмента в начальное положение над суспензионной пробиркой, содержащей указанную суспензию, включающую образец колонии микроорганизмов, и для автоматического опускания и подъема в суспензию и из нее и для установки дозирующего инструмента в положение переноса, соответственно;
- установка указанного дозирующего инструмента в указанный держатель дозирующего инструмента позиционирующего устройства;
- с помощью указанного позиционирующего устройства установка дозирующего инструмента в начальное положение над суспензионной пробиркой, опускание дозирующего инструмента в суспензию в указанной суспензионной пробирке, применение дозирующего инструмента для забора некоторого количества суспензии, подъем дозирующего инструмента с указанным количеством суспензии в положение переноса; указанный дозирующий инструмент включает герметичную камеру, закрытую контролируемым клапаном, для того, чтобы вмещать некоторое количество суспензионной среды;
- обеспечение держателя мишени для закрепления мишени, указанная мишень имеет множество точек нанесения;
- установка мишени в держатель мишени;
- обеспечение устройства для переноса для автоматического переноса дозирующего инструмента из положения переноса в положение над одной из точек нанесения мишени и для опускания дозирующего инструмента на предопределенное расстояние над мишенью, подача давления в камеру до значения давления в диапазоне приблизительно от 0,5 бар до 1,1 бар (от 50 до 110 кПа), а также открытие клапана на такое время, за которое каплю суспензии объемом в диапазоне от около 0,5 до 3,0 мкл наносят на одну из точек нанесения; и
- подъем указанного дозирующего инструмента от мишени.
Предпочтительно, форма дозирующего инструмента является такой, что нанесение капли суспензии на мишень осуществляется без брызг. В частности, способ включает подачу давления в камеру до значения давления в диапазоне от около 0,5 бар до 1,1 бар (от 50 до 110 кПа), а также открытие клапана на такое время, за которое каплю суспензии объемом в диапазоне от около 0,5 до 3,0 мкл наносят на не более чем половину одной из точек нанесения. Было показано, что в случае, когда образец покрывает не более чем около половины указанной одной из точек нанесения мишени, результаты анализа, полученные с помощью инструмента МАЛДИ, части точки нанесения, которая изначально не была покрыта образцом, являются неожиданно чрезвычайно более точными, чем результаты анализа, полученные с помощью инструмента МАЛДИ, части точки нанесения, которая изначально была покрыта образцом. Предполагается, что кристаллизация, которая происходит после того, как каплю материала матрицы наносят поверх образца, покрывающего часть точки нанесения, обеспечивает содержание некоторого количества образца на непокрытой образцом части точки нанесения и что данное количество является чрезвычайно подходящим для обеспечения превосходных результатов анализа. Физические или химические процессы, которые являются причиной данного эффекта, на данный момент являются неясными, но, возможно, появится большая ясность, когда будут известны фундаментальные процессы, лежащие в основе МАЛДИ.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Изобретение дополнительно будет описано со ссылкой на Фигуру 1, на которой показан неограничивающий пример осуществления аппарата согласно изобретению, данная Фигура 1 также предназначена для объяснения примеров осуществления способа согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В настоящем изобретении МАЛДИ или МАЛДИ-TOF-MS применяют для идентификации микроорганизмов. При осуществлении МАЛДИ-TOF-MS образец колонии микроорганизмов капают или наносят на мишень, которая закреплена в фиксированном положении в инструменте МАЛДИ. Данная мишень имеет множество точек нанесения (например, от 24 до 384 точек нанесения на одной мишени), и данные точки нанесения имеют фиксированную ориентацию относительно краев мишени. Мишень помещают на двухкоординатную (X-Y) подставку, и таким образом обеспечивается возможность поместить полученный образец колонии микроорганизмов на выбранную точку нанесения, где положение, в котором нанесен конкретный образец, обозначают параметрами X-Y и хранят в памяти компьютера центрального управления.
Хотя это не показано подробно на Фигуре 1, мишень располагают ниже направляющих для переноса 18 в положении, обозначенном Б. Образец можно перенести вдоль направляющих переноса 18 от чашки для культивирования 3 и/или суспензионной пробирки 11 в положение над мишенью Б, где образец опускают для нанесения в точку нанесения мишени.
Хотя изобретение будет описано подробно ниже со ссылкой на получение суспензии, включающей образец, и нанесение капли указанной суспензии в точку нанесения мишени, настоящее изобретение также относится к непосредственному нанесению образца, полученного (собранного) с чашки для культивирования, на точку нанесения мишени.
В общем смысле, в последнем способе колонию микроорганизмов автоматически локализуют и детектируют на чашке для культивирования. Образец указанной отобранной колонии микроорганизмов получают в автоматическом режиме, например, с помощью инструмента для отбора колоний, который приводят в контакт с колонией. По меньшей мере, некоторое количество указанного образца отобранной колонии микроорганизмов непосредственно наносят на мишень в автоматическом режиме путем опускания инструмента для отбора колоний таким образом, что образец колонии микроорганизмов, находящейся в инструменте для отбора колоний, приходит в контакт с мишенью, и перемещения инструмента для отбора колоний в плоскости, параллельной плоскости мишени, осуществляют таким образом, что образец колонии микроорганизмов наносят на точку нанесения, в частности, покрывая не более чем около половины указанной одной из точек нанесения мишени. Затем мишень с указанным образцом автоматически переносят в аппарат для осуществления МАЛДИ для идентификации указанного образца отобранной колонии микроорганизмов.
Более подробно данный способ включает следующие автоматизированные этапы:
- обеспечение первого инструмента для отбора колоний и обеспечение позиционирующего устройства с держателем инструмента для отбора колоний для крепления инструмента для отбора колоний, указанное позиционирующее устройство устанавливают с обеспечением возможности установки инструмента для отбора колоний в начальное положение над полученным местоположением отобранной колонии микроорганизмов на чашке для культивирования и для автоматического опускания и подъема инструмента для отбора колоний по направлению к чашке для культивирования и от нее, а также для установки инструмента для отбора колоний в положение переноса, соответственно;
- установка первого указанного инструмента для отбора колоний в указанный держатель инструмента для отбора колоний позиционирующего устройства;
- с помощью указанного позиционирующего устройства установка первого инструмента для отбора колоний в начальное положение над полученным местоположением отобранной колонии микроорганизмов на чашке для культивирования, автоматическое опускание первого инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора образца указанного микроорганизма, автоматический подъем первого инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса;
- обеспечение держателя суспензионной пробирки для крепления суспензионной пробирки;
- установка суспензионной пробирки в держатель суспензионной пробирки;
- обеспечение устройства для переноса для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства в положение над точками нанесения мишени и для опускания инструмента для отбора колоний таким образом, что образец колонии микроорганизмов, находящийся в инструменте для отбора колоний, приходит в контакт с мишенью, перемещение инструмента для отбора колоний в плоскости, параллельной плоскости мишени, таким образом, что образец колонии микроорганизмов наносят на точку нанесения, в частности, покрывая не более чем около половины одной из точек нанесения мишени; и подъем указанного инструмента для отбора колоний в направлении от мишени. Затем каплю раствора матрицы МАЛДИ автоматически наносят поверх количества образца, нанесенного на мишень.
В случае если колонию микроорганизмов следует подвергнуть другому анализу или тесту, например, но не в качестве ограничения, анализу восприимчивости к антибиотикам (AST), второй образец указанной отобранной колонии микроорганизмов возможно получить способом, аналогичным получению исходного образца. Так как положение колонии микроорганизмов на чашке для культивирования уже выбрано и, следовательно, "известно" компьютеру центрального управления, существует возможность легко и воспроизводимо получить второй образец из той же колонии. По меньшей мере некоторое количество второго образца указанной отобранной колонии микроорганизмов затем переносят и наносят на тестовую чашку для культивирования, которую возможно, например, автоматически поместить в другое положение под направляющими для переноса 18. Затем указанную тестовую чашку для культивирования автоматически переносят в аппарат для осуществления анализа восприимчивости к антибиотикам или другого дополнительного анализа.
Так как для осуществления описания и идентификации микроорганизмов, как правило, на чашке для культивирования выращивают множество колоний и, кроме того, применяют множество чашек для культивирования, изобретение обеспечивает возможность идентифицировать каждую чашку для культивирования отдельно, например, с помощью штрихкода, и, более того, каждую интересующую колонию на одной чашке для культивирования отбирают и присваивают ей идентификационную маркировку. Также, перед автоматизированным этапом локализации и отбора колонии микроорганизмов на чашке для культивирования, способ согласно изобретению включает этап обеспечения чашки для культивирования, содержащей некоторое количество колоний микроорганизмов, получения исходного изображения указанной чашки для культивирования, включающего все колонии микроорганизмов, отображения указанного исходного изображения указанной чашки для культивирования, включающего все колонии микроорганизмов, на дисплей и отбора, по меньшей мере, одной колонии микроорганизмов на указанном исходном изображении. Таким образом, исследователь или аналитик может выбрать интересующие колонии, основываясь на исчерпывающем образовании и знании. Так как каждую чашку для культивирования обеспечивают индивидуальным идентификатором, идентифицирующим указанную чашку для культивирования, например штрихкодом, исходное изображение указанной чашки для культивирования, включающее все колонии, сохраняют, и информацию, относящуюся к по меньшей мере одной отобранной колонии микроорганизмов, сохраняют (предпочтительно, с привязками, приведенными в (электронном) исходном изображении), хранение всей указанной информации и идентификаторов чашки для культивирования в памяти компьютера центрального управления обеспечивает чрезвычайно точную последующую обработку. Таким образом, единственной операцией, осуществляемой вручную, является осуществление выбора интересующих колоний, в то время как все соответствующие данные обрабатываются автоматизированным способом. Опционально, исследователь или аналитик может вручную ввести инструкции по обработке, относящиеся к обработке, которой следует подвергнуть указанную колонию микроорганизмов с указанной чашки для культивирования, указанные инструкции по обработке также сохраняют в указанной памяти указанного компьютера центрального управления для последующего применения. После данного этапа, осуществляемого вручную, все последующие этапы осуществляют полностью в автоматическом режиме надежным и эффективным способом. Для данной последующей автоматической обработки чашку для культивирования автоматически устанавливают на подставку для чашки для культивирования устройства с инструментом для отбора колоний, включающего устройство получения изображения. Получают изображение чашки для культивирования, закрепленной в устройстве с инструментом для отбора колоний, и вместе с идентификатором указанной чашки для культивирования обеспечивается возможность сравнения данного изображения, полученного с помощью устройства для получения изображения указанного инструмента для отбора колоний, с сохраненным исходным изображением указанной чашки для культивирования и, таким образом, получения информации, относящейся к положению отобранной колонии микроорганизмов и опционально относящейся к инструкциям по обработке, относящимся к процессам, которым следует подвергнуть указанную отобранную колонию микроорганизмов. Путем сравнения изображения чашки для культивирования в момент, когда ее помещают в устройство с инструментом для отбора колоний, с исходным изображением возможно автоматически получить информацию о положении отобранных колоний, например, с помощью компьютеризированного сравнения изображений. Более того, каждую мишень обеспечивают идентификационной маркировкой, и опционально каждая точка нанесения указанной мишени имеет идентификационную маркировку или идентификатор положения, таким образом, после сохранения идентификационной маркировки указанных мишеней и точек нанесения вместе с характеристиками суспензии с привязкой к идентификатору чашки для культивирования, с которой была получена отобранная колония микроорганизмов, в памяти указанного компьютера центрального управления обеспечивается возможность корректной привязки полученных результатов МАЛДИ к конкретной колонии микроорганизма, подвергнутой анализу, точным и автоматизированным способом.
Сейчас будет описан вариант осуществления способа, в котором получают суспензию из образца колонии микроорганизмов, собранного с чашки для культивирования, а также вариант осуществления аппарата для осуществления данного способа.
Фигура 1 схематически демонстрирует вариант осуществления аппарата 1 для автоматического получения суспензии образца колонии микроорганизмов согласно изобретению. Указанный аппарат 1 включает подставку 2 для чашки для культивирования 3, содержащей микроорганизм 4 на питательном слое 5, например на слое агарового геля.
Аппарат 1 дополнительно включает первый инструмент для отбора колоний 6 и дополнительный инструмент для отбора колоний 7. Позиционирующее устройство 8 включает держатель инструмента для отбора колоний 9, в приведенном варианте осуществления для разъемного закрепления инструмента для отбора колоний, в варианте осуществления, приведенном на Фигуре 1, держатель инструмента для отбора колоний 9 закрепляет первый инструмент для отбора колоний 6. Позиционирующее устройство 8 устанавливают для установки первого инструмента для отбора колоний 6 в начальное положение (показанное сплошными линиями на Фигуре 1) над чашкой для культивирования 3 и его устанавливают для автоматического опускания и подъема первого инструмента для отбора колоний 6 по направлению к чашке для культивирования 3 и от нее, таким образом, что первый инструмент для отбора колоний 6 можно устанавливать в положение (показанное пунктирными линиями 6'), в котором он контактирует с микроорганизмом 4 и захватывает образец указанного микроорганизма. После того как первый инструмент для отбора колоний 6 захватил образец, позиционирующее устройство 8 поднимает и устанавливает первый инструмент для отбора колоний 6 в положение переноса, которое в варианте изобретения, показанном на Фигуре 1, идентично начальному положению. В других вариантах осуществления начальное положение и положение переноса могут отличаться друг от друга.
Аппарат 1 согласно изобретению дополнительно включает держатель суспензионной пробирки 10 для закрепления суспензионной пробирки 11, которая может содержать суспензионную среду, которую дозируют из автоматического дозатора суспензионной среды 12, который в приведенном варианте осуществления имеет дозирующий наконечник 13 для автоматического дозирования суспензионной среды 14 в суспензионную пробирку 11, закрепленную в держателе суспензионной пробирки 10. В настоящем варианте осуществления держатель суспензионной пробирки 10 представляет собой вращающийся держатель суспензионной пробирки для вращения суспензионной пробирки 11 вокруг вертикальной оси А.
Устройство для переноса 15 включают в аппарат согласно изобретению 1 для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства 8 в положение над суспензионной пробиркой 11, закрепленной в держателе суспензионной пробирки 10. В приведенном варианте осуществления устройство для переноса 15 включает держатель для переноса 16 с хватательными приспособлениями 17 для разъемного закрепления инструмента для отбора колоний. Устройство для переноса 15 возможно, по существу, известным способом установить на направляющие для переноса 18, как на рельсы, для линейного передвижения по ним, как обозначено стрелками, и данным способом устройство для переноса 15 возможно двигать к позиционирующему устройству 8 таким образом, чтобы хватательные приспособления 17 могли вынуть инструмент для отбора колоний из позиционирующего устройства 8, держатель инструмента для отбора колоний 9, таким образом, отпускает инструмент для отбора колоний после того, как хватательные приспособления 17 ухватили инструмент для отбора колоний. В варианте осуществления, приведенном на Фигуре 1, второй или дополнительный инструмент для отбора колоний 7, содержащий предварительно собранный образец 19 микроорганизма 4, устанавливают над суспензионной пробиркой 11 с помощью устройства для переноса 15 в начальном положении, обозначенном сплошными линиями. Устройство для переноса 15 устанавливают для опускания второго инструмента для отбора колоний 7 в суспензионную среду 14, содержащуюся в суспензионной пробирке 11, причем положение второго инструмента для отбора колоний 7ʺ с образцом 19 является таким, что он погружен в суспензионную среду 14, как показано пунктирными линиями на Фигуре 1. В данном положении устройство для переноса 15 активируют для колебания второго инструмента для отбора колоний 7 путем линейного вертикального движения в течение периода времени, необходимого для высвобождения образца 19 из второго инструмента для отбора колоний 7. Затем устройство для переноса 15 устанавливает второй инструмент для отбора колоний 7 в положение ожидания над суспензионной пробиркой 11, причем положение ожидания в варианте осуществления, приведенном на Фигуре 1, является идентичным начальному положению. В других вариантах осуществления положение ожидания и начальное положение могут отличаться друг от друга.
Аппарат согласно изобретению 1 дополнительно обеспечивают турбидиметром 20 для осуществления измерений мутности суспензионной среды 14, содержащейся в суспензионной пробирке 11, закрепленной в держателе суспензионной пробирки 10. Как известно в данной области техники, турбидиметр может обеспечить значения измерений, которые являются мерой концентрации материала, в данном случае концентрации микроорганизма, суспендированного в суспензионной среде. В варианте осуществления, приведенном на Фигуре 1, турбидиметр 20 включает лазер 21, который передает свет лазера в направлении суспензионной среды и сквозь нее, и сенсор 22, который детектирует количество света лазера, переданного сквозь суспензионную среду. Кроме того, имеется дополнительный сенсор (не обозначенный на чертеже), который, например, устанавливают перпендикулярно пути света лазера для детекции количества света лазера, которое рассеивает суспензия.
Работой устройства согласно изобретению управляет контроллер 23, например, включающий микропроцессор, который присоединен (как обозначено сигнальными линиями) к позиционирующему устройству 8, устройству для переноса 15, автоматическому дозатору суспензионной среды 12 и турбидиметру 20 для автоматического управления движением позиционирующего устройства 8, движением устройства для переноса 15, работой автоматического дозатора суспензионной среды 12 и работой турбидиметра 20, соответственно. Кроме того, контроллер 23 возможно напрямую присоединить к другим частям аппарата, таким как, например, держатель инструмента для отбора колоний 9, держатель для переноса 16, лазер 21 и сенсор 22.
В варианте осуществления, приведенном на Фигуре 1, контроллер 21 устанавливают для управления турбидиметром 20 таким образом, чтобы измерение мутности суспензионной среды 14 начиналось до того, как второй инструмент для отбора колоний 7 будет погружен в суспензионную среду 14. Кроме того, контроллер 23 управляет вращающимся держателем суспензионной пробирки 10 для начала вращения суспензионной пробирки 11, закрепленной в держателе 10, до того, как второй инструмент для отбора колоний 7 будет погружен в суспензионную среду 14, и для продолжения вращения суспензионной пробирки 11 во время измерения мутности суспензионной среды 14. В приведенном варианте осуществления контроллер 23 управляет турбидиметром таким образом, что измерение мутности осуществляют в течение всего периода времени, в течение которого второй инструмент для отбора колоний 7 колеблется. Данным образом турбидиметр 30 обеспечивает значение измерения в режиме реального времени контроллеру, данное значения является показателем измеренной мутности и, следовательно, концентрации микроорганизма, в течение периода времени, в течение которого второй инструмент для отбора колоний колеблется.
Контроллер 23 включает память, в которой хранят первое и второе пороговое значение, где первое пороговое значение является равным или больше второго порогового значения. Если значение измерения мутности, обеспеченное турбидиметром, является равным или находится между первым и вторым пороговым значением, концентрация/количество микроорганизма в суспензионной среде является достаточным для того, чтобы позволить подвергать суспензионную пробирку дальнейшей обработке. В данном случае контроллер 23 обеспечивает сигнал о том, что суспензионную пробирку возможно подвергать дальнейшей обработке. Кроме того, в данной ситуации второй инструмент для отбора колоний 7 возможно сбросить, например, путем переноса устройства для переноса в положение В, в котором хватательные приспособления 17 активируют таким образом, чтобы высвободить второй инструмент для отбора колоний 7.
Если значение окончательного измерения турбидиметра превышает первое пороговое значение, предварительно сохраненное в памяти контроллера 23, то концентрация микроорганизма является слишком высокой, чтобы позволить подвергать суспензионную пробирку дальнейшей обработке. В данной ситуации контроллер 23 управляет автоматическим дозатором суспензионной среды 12 таким образом, чтобы он подавал дополнительное количество суспензионной среды в суспензионную пробирку 11. Данное дополнительное количество суспензионной среды основано на начальном количестве суспензионной среды, значении окончательного измерения и значении первого и/или второго порогового значения таким образом, что добавление дополнительного количества суспензионной среды в суспензионную среду, уже присутствующую в суспензионной пробирке 11, приведет к получению такой концентрации микроорганизма в суспензионной среде, которая удовлетворяет требованиям для дальнейшей обработки, что возможно подтвердить с помощью дополнительного измерения мутности турбидиметром 20.
Если значение окончательного измерения турбидиметра 20 меньше второго порогового значения, это обозначает, что концентрация микроорганизма в суспензионной среде является слишком низкой, при этом контроллер 23 управляет аппаратом 1 таким образом, что с помощью первого инструмента для отбора колоний 6 захватывают дополнительный образец микроорганизма (альтернативно, для захвата дополнительного образца можно применять второй или другой инструмент для отбора колоний). Таким образом, контроллер 23 в данном случае управляет работой устройства для переноса 15 таким образом, что второй инструмент для отбора колоний 7 сбрасывают, как описано выше.
Затем (или одновременно) первый инструмент для отбора колоний 6 в держателе инструмента для отбора колоний 8 опускают из начального положения над чашкой для культивирования 3 по направлению к чашке для культивирования и приводят в контакт с микроорганизмом 4 для захвата дополнительного образца указанного микроорганизма. После чего первый инструмент для отбора колоний 6 автоматически поднимают с дополнительным образцом микроорганизма в направлении от чашки для культивирования в положение переноса. Затем указанное устройство для переноса автоматически переносит первый инструмент для отбора колоний с дополнительным образцом микроорганизма из положения переноса позиционирующего устройства 8 в положение над суспензионной пробиркой 11. Первый инструмент для отбора колоний 6 с дополнительным образцом микроорганизма опускают в суспензионную среду 14 и подвергают колебанию с помощью устройства для переноса 15 путем линейного вертикального движения в течение периода времени, необходимого для высвобождения дополнительного образца указанного микроорганизма в суспензионную среду. Во время колебания снова измеряют мутность, и измеренное значение сравнивают с первым и вторым пороговыми значениями, хранящимися в памяти контроллера 23. В данном случае контроллер 23 возможно установить для управления движением устройства для переноса 15 таким образом, что первый инструмент для отбора колоний 6 поднимают в положение ожидания, если во время колебания значение измерения мутности в режиме реального времени, осуществляемого турбидиметром 20, является равным или меньше, чем первое пороговое значение, и равным или больше, чем второе пороговое значение.
Суспензионные пробирки, которые в особенности применимы в аппарате согласно изобретению, имеют, по существу, круглое поперечное сечение диаметром от около 6 до около 12 мм, предпочтительно 10 мм. В данных относительно маленьких по размеру суспензионных пробирках контроллер 23 может управлять автоматическим дозатором суспензионной среды 12 таким образом, что подаваемое начальное количество суспензионной среды составляет от около 0,5 до 2 мл, предпочтительно около 1 мл.
Колебанием устройства для переноса 15 управляют с помощью контроллера 23 таким образом, что инструмент для отбора колоний колеблется с частотой от около 5 Гц до около 120 Гц, предпочтительно от около 30 Гц до около 90 Гц, наиболее предпочтительно около 50 Гц, и с амплитудой от около 0,5 мм до около 4 мм, предпочтительно от 2 мм до около 3 мм. Дополнительно контроллер устанавливают для управления колебанием устройства для переноса 15 таким образом, что период времени, в течение которого инструмент для отбора колоний колеблется, составляет от около 3 секунд до около 10 секунд, предпочтительно около 6 секунд.
Аппарат согласно изобретению 1 дополнительно включает конвейер 24, конечное положение которого может образовывать подставку 2 для чашки для культивирования, или, как показано на Фигуре 1, конвейер 24 и подставку 2, которые взаимно расположены таким образом, что чашку для культивирования возможно поместить на подставку и удалить с подставки с помощью соответствующего действия конвейера 24. Конвейером 24 управляет контроллер 23 для автоматической установки и удаления чашки для культивирования, содержащей указанный микроорганизм, на подставку и с нее, соответственно. Пожалуйста, обратите внимание, что в других, не приведенных вариантах осуществления можно применять различные приспособления для автоматической установки и удаления чашки для культивирования на подставу и с нее, соответственно. В частности, контроллер устанавливают для того, чтобы обеспечивать автоматическое удаление чашки для культивирования с подставки с помощью автоматического устройства для установки и удаления чашки для культивирования только после обеспечения сигнала о том, что суспензионную пробирку с суспензией возможно удалить из держателя суспензионной пробирки для дальнейшей обработки. Это гарантирует, что всегда имеется возможность захватить дополнительный образец, если это необходимо.
Как показано на Фигуре 1, аппарат согласно изобретению 1 дополнительно включает устройство для автоматической установки и удаления суспензионной пробирки 25 для автоматической установки и удаления суспензионной пробирки в держатель суспензионной пробирки и из него, соответственно. В приведенном варианте осуществления устройство для автоматической установки и удаления суспензионной пробирки 25 включает хватательные приспособления 26 для разъемного захвата суспензионной пробирки 11'. Вновь, контроллер 23 устанавливают таким образом, что он присоединен к автоматическому устройству для установки и удаления суспензионной пробирки 25, 26 для управления работой автоматическим устройством для установки и удаления суспензионной пробирки и для автоматической установки суспензионной пробирки в держатель суспензионной пробирки. Контроллер 23, в частности, устанавливают для автоматического удаления суспензионной пробирки из держателя суспензионной пробирки с помощью автоматического устройства для установки и удаления суспензионной пробирки 25, 26 только после обеспечения сигнала о том, что суспензионную пробирку можно удалить из держателя суспензионной пробирки для дальнейшей обработки. В приведенном варианте осуществления автоматическое устройство для установки и удаления суспензионной пробирки 25 является подвижным вдоль направляющих для переноса 18 независимо от движения устройства для переноса 15. В положении, обозначенном как В, возможно доставать пустые суспензионные пробирки, а суспензионные пробирки с суспензионной средой, содержащие достаточную концентрацию микроорганизма, возможно передать на оборудование для дальнейшей обработки, например в инкубатор. Пожалуйста, обратите внимание, что положение В возможно, например, образовать мультитрековой системой, которая может привести устройство для установки и удаления суспензионной пробирки 25 и устройство для переноса 15 в различное положение, в котором присутствуют различные компоненты и осуществляются различные процессы.
Полученную таким образом суспензию образца применяют для осуществления описания или идентификации микроорганизмов с помощью МАЛДИ и опционально применяют для других анализов, таких как, например, AST. Для идентификации микроорганизмов с помощью МАЛДИ получают каплю указанной суспензии и данную каплю переносят на указанную мишень. Каплю можно получить с применением другого инструмента для отбора колоний, который закреплен в хватательных приспособлениях 17 и который автоматически погружают в суспензию. Когда данный инструмент для отбора колоний поднимают из суспензии, капля суспензии удержится на наконечнике данного инструмента для отбора колоний, который можно перенести вдоль направляющих в положение В, где инструмент для отбора колоний с каплей опускают до того момента, когда капля приходит в контакт с точкой нанесения на мишени, и, по меньшей мере, часть капли останется в точке нанесения после того, как инструмент для отбора колоний подняли в направлении от мишени. Альтернативно, дозирующий инструмент, который будет описан ниже, можно применять для захвата некоторого количества суспензии из суспензионной пробирки, переноса данного количества в положение В и нанесения капли суспензии на мишень. После того как каплю суспензии нанесли на мишень и, в частности, когда данной капле позволили высохнуть, на некоторое количество образца, нанесенного на мишень, или его часть автоматически наносят каплю матрицы МАЛДИ. Для осуществления других тестов или других анализов тем же способом можно обеспечить вторую каплю указанной суспензии образца, и данную каплю можно автоматически перенести и нанести, например, на тестовую чашку для культивирования, которую затем перемещают в автоматическом режиме для осуществления анализа восприимчивости к антибиотикам или другого дополнительного анализа.
Каждая суспензионная пробирка включает уникальную идентификационную маркировку, которую хранят вместе с характеристиками суспензии с привязкой к идентификатору чашки для культивирования, с которой получили отобранную колонию микроорганизмов, в памяти компьютера центрального управления, с целью, помимо прочего, корректно и быстрым способом привязать полученные результаты анализа к чашке для культивирования и колонии, относящейся к указанным результатам.
Хотя это и не показано на Фигуре 1, некоторое количество суспензии возможно отобрать из суспензии в суспензионной пробирке с помощью дозирующего инструмента, который автоматически закреплен и установлен хватательными приспособлениями (функционирующими как держатель дозирующего инструмента) 17 и устройством для переноса или позиционирующим устройством 15 таким же способом, как инструмент для отбора колоний. Позиционирующее устройство 15 устанавливают для установки указанного дозирующего инструмента в начальном положении над суспензионной пробиркой и для автоматического опускания и подъема дозирующего инструмента в суспензию и из нее и для установки дозирующего инструмента в положение переноса, соответственно. Когда дозирующий инструмент опускают в суспензию в указанной суспензионной пробирке, дозирующее устройство работает известным способом (например, применяя давление) для захвата некоторого количества суспензии. Затем дозирующее устройство с указанным количеством суспензии поднимают в положение переноса. Для удержания количества суспензии дозирующий инструмент включает герметичную камеру, закрытую контролируемым клапаном. Дозирующий инструмент автоматически переносят с помощью устройства для переноса 15 в положение В над одной из точек нанесения мишени. В данном положении дозирующий инструмент опускают на заранее определенное расстояние над мишенью, после чего в камеру подают давление до значения давления в диапазоне приблизительно от 0,5 бар до 1,1 бар (от 50 до 110 кПа). Затем клапан открывают на такое время, за которое каплю суспензии объемом от около 0,5 до 3,0 мкл наносят на точку нанесения, более конкретно, покрывая не более чем около половины одной из точек нанесения на мишени. После нанесения капли дозирующий инструмент поднимают в направлении от мишени, и его возможно перенести в положение В, где его можно сбросить или очистить для повторного применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ И СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ И ПРИГОТОВЛЕНИЯ ОБРАЗЦА МИКРООРГАНИЗМА КАК ДЛЯ ИДЕНТИФИКАЦИИ, ТАК И ДЛЯ ТЕСТОВ НА ЧУВСТВИТЕЛЬНОСТЬ К АНТИБИОТИКАМ | 2016 |
|
RU2718086C2 |
| СПОСОБ ПРЯМОЙ ИНОКУЛЯЦИИ БУЛЬОНА ИЗ ИСХОДНОЙ СУСПЕНЗИИ | 2019 |
|
RU2807112C2 |
| СПОСОБ КОЛИЧЕСТВЕННОГО ПЕРЕНОСА АНАЛИЗИРУЕМЫХ ОБРАЗЦОВ | 2011 |
|
RU2559475C2 |
| СПОСОБЫ IN VITRO ДЛЯ СОЗДАНИЯ И ПОДДЕРЖАНИЯ ЛИНИЙ РАСТИТЕЛЬНЫХ КЛЕТОК В ВИДЕ ОТДЕЛЬНЫХ КЛЕТОК В СУСПЕНЗИИ С ИНТАКТНЫМИ КЛЕТОЧНЫМИ СТЕНКАМИ И ИХ ТРАНСФОРМАЦИИ | 2007 |
|
RU2451744C2 |
| СПОСОБ КОЛИЧЕСТВЕННОЙ ОЦЕНКИ БАКТЕРИЦИДНОЙ АКТИВНОСТИ ДЕЗИНФИЦИРУЮЩИХ СРЕДСТВ | 2011 |
|
RU2510610C2 |
| Способ выделения хондроцитов | 2017 |
|
RU2677688C1 |
| СПОСОБ ПОЛУЧЕНИЯ БАКТЕРИОЦИНСОДЕРЖАЩЕЙ КОМПОЗИЦИИ | 2020 |
|
RU2773131C2 |
| СПОСОБ ВЫСОКОЭФФЕКТИВНОГО ОТБОРА МИКРОБНЫХ АНТАГОНИСТОВ ПРОТИВ ПАТОГЕНОВ | 2011 |
|
RU2618873C2 |
| ПРЕЦИЗИОННЫЙ СПОСОБ СРАВНИТЕЛЬНОЙ ЭКСПРЕСС-ОЦЕНКИ ЭФФЕКТИВНОСТИ АНТИМИКРОБНЫХ ВЕЩЕСТВ В ОТНОШЕНИИ УСЛОВНО ПАТОГЕННОГО ВИДА Pseudomonas aeruginosa | 2021 |
|
RU2760788C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОДСЧЕТА ЖИЗНЕСПОСОБНЫХ МИКРООРГАНИЗМОВ ВИДА Legionella pneumophila | 2009 |
|
RU2490327C2 |
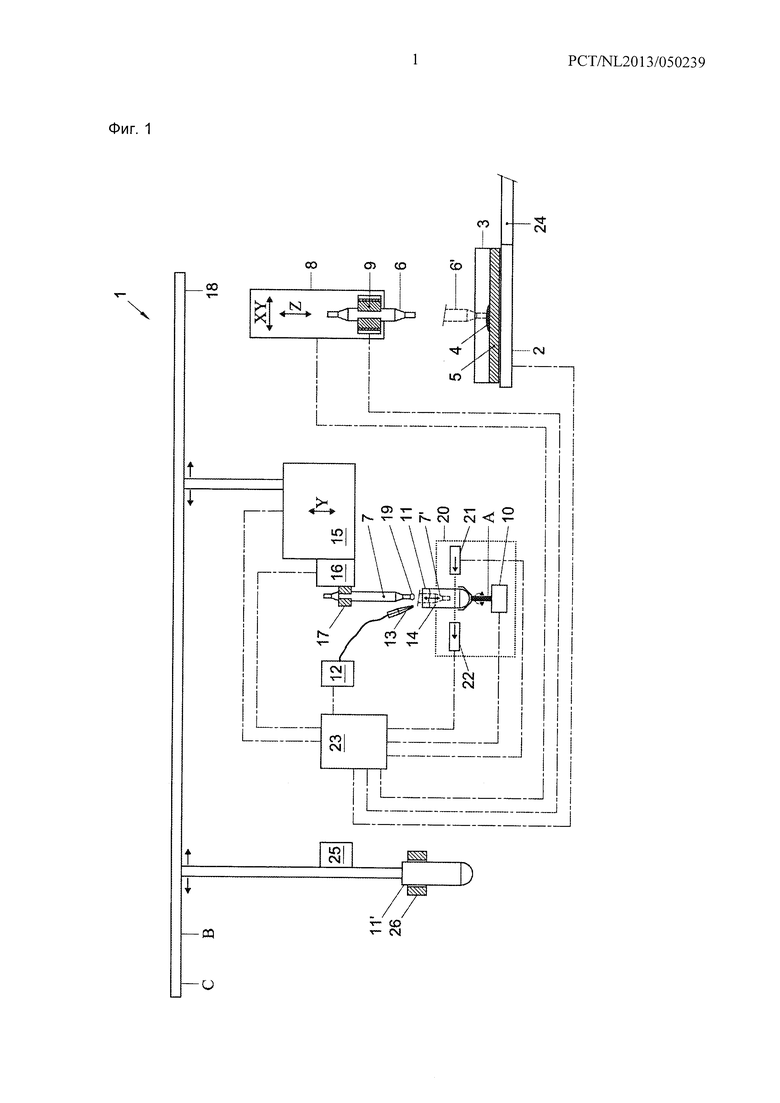
Группа изобретений относится к способу и аппарату для локализации и отбора колонии микроорганизмов на чашке для культивирования и идентификации микроорганизмов в указанной отобранной колонии с помощью МАЛДИ. Способ включает автоматизированные этапы локализации и отбора колонии микроорганизмов на чашке для культивирования; получения образца указанной отобранной колонии микроорганизмов; нанесения по меньшей мере части указанного образца указанной отобранной колонии микроорганизмов на мишень и переноса указанной мишени с указанным образцом в аппарат для осуществления МАЛДИ для идентификации указанного образца указанной отобранной колонии микроорганизмов. Образец колонии микроорганизмов автоматически наносят в точку нанесения таким образом, что образец покрывает не более чем около половины одной из точек нанесения мишени. Суспензию образца микроорганизмов автоматически получают с помощью автоматического сбора образца с помощью инструмента для отбора колоний и погружения инструмента для отбора колоний с указанным образцом в суспензию, после чего инструмент для отбора колоний приводят в вибрацию в вертикальном направлении исключительно для того, чтобы высвободить образец из инструмента для отбора колоний. Обеспечивается повышение воспроизводимости приготовления суспензии образца микроорганизмов, повышение надежности и воспроизводимости высвобождения образца в точку нанесения на мишени при локализации и отборе колонии микроорганизмов и их идентификации с помощью МАЛДИ. 2 н. и 10 з.п. ф-лы, 1 ил.
1. Способ локализации и отбора колонии микроорганизмов на чашке для культивирования и идентификации микроорганизмов в указанной отобранной колонии с помощью МАЛДИ (матрично-активированная лазерная десорбция/ионизация), при этом указанный способ включает автоматизированные этапы:
- локализации и отбора колонии микроорганизмов на чашке для культивирования;
- получения образца указанной отобранной колонии микроорганизмов;
где этапы получения образца указанной отобранной колонии микроорганизмов выполняют с помощью автоматизированных этапов:
- обеспечения первого инструмента для отбора колоний и обеспечения позиционирующего устройства с держателем инструмента для отбора колоний для расположения инструмента для отбора колоний, при этом указанное позиционирующее устройство устанавливают с обеспечением возможности установки инструмента для отбора колоний в начальное положение над полученным местоположением отобранной колонии микроорганизмов на чашке для культивирования и для автоматического опускания и подъема инструмента для отбора колоний по направлению к чашке для культивирования и от нее, а также для установки инструмента для отбора колоний в положение переноса соответственно;
- установки указанного первого инструмента для отбора колоний в указанный держатель инструмента для отбора колоний позиционирующего устройства;
- с помощью указанного позиционирующего устройства - установки первого инструмента для отбора колоний в начальное положение над полученным местоположением отобранной колонии микроорганизмов на чашке для культивирования, автоматического опускания первого инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора образца указанного микроорганизма, автоматического подъема первого инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса; и
- нанесения по меньшей мере части указанного образца указанной отобранной колонии микроорганизмов на мишень;
где этап нанесения по меньшей мере части указанного образца указанной отобранной колонии микроорганизмов на мишень выполняют с помощью автоматизированных этапов:
- обеспечения держателя суспензионной пробирки для расположения суспензионной пробирки;
- установки суспензионной пробирки в держатель суспензионной пробирки;
- обеспечения автоматического дозатора суспензионной среды для автоматического дозирования суспензионной среды в суспензионную пробирку, расположенную в держателе суспензионной пробирки;
- с помощью автоматического дозатора - автоматической подачи исходного количества суспензионной среды в суспензионную пробирку, расположенную в держателе суспензионной пробирки;
- обеспечения устройства для переноса для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, расположенной в держателе для суспензионной пробирки, а также для опускания и подъема инструмента для отбора колоний в и из суспензионной среды, содержащейся в суспензионной пробирке, а также для установки инструмента для отбора колоний в положение ожидания над суспензионной пробиркой, расположенной в держателе для суспензионной пробирки, соответственно;
- с помощью указанного устройства для переноса - автоматического переноса указанного первого инструмента для отбора колоний с образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, расположенной в держателе суспензионной пробирки, опускания указанного первого инструмента для отбора колоний с образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке; с помощью устройства для переноса - осуществления колебательных движений первым инструментом для отбора колоний путем линейного вертикального движения в период времени, когда первый инструмент для отбора колоний с образцом указанного микроорганизма погружен в суспензионную среду; и после того, как указанный период времени истек, поднятия первого инструмента для отбора колоний из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания;
- обеспечения турбидиметра, производящего измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе для суспензионной пробирки;
- по меньшей мере после того, как истек период времени, когда устройство для переноса осуществляет колебательные движения, - измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечения значения окончательного измерения, указывающего на измеренную мутность;
- обеспечения контроллера, соединенного с возможностью связи с позиционирующим устройством, устройством для переноса, автоматическим дозатором суспензионной среды и турбидиметром, для автоматического управления движением позиционирующего устройства, движением устройства для переноса, работой автоматического дозатора суспензионной среды и работой турбидиметра соответственно;
- при этом указанный контроллер выполняет этапы:
а) определения, является ли значение окончательного измерения большим, чем первое пороговое значение, ранее сохраненное в памяти контроллера, если да, то выполняют этап b); или является ли значение окончательного измерения равным или большим, чем второе пороговое значение, ранее сохраненное в памяти контроллера, является ли указанное первое пороговое значение равным или большим, чем второе пороговое значение, и если да, то выполняют этап с); или является ли значение окончательного измерения меньшим, чем второе пороговое значение, если да, то выполняют этап d);
b) контролирования автоматического дозатора суспензионной среды для подачи дополнительного количества суспензионной среды в суспензионную пробирку;
c) обеспечения сигнала о том, что суспензионную пробирку с суспензией можно удалить из держателя суспензионной пробирки для дальнейшей обработки; или
d) обеспечения дополнительного инструмента для отбора колоний, включающее установку указанного дополнительного инструмента для отбора колоний в указанный держатель инструмента для отбора колоний позиционирующего устройства;
и способ дополнительно включает автоматизированные этапы:
- получения капли указанной суспензии образца;
- переноса указанной капли суспензии образца на указанную мишень;
- переноса указанной мишени с указанным образцом в аппарат для осуществления МАЛДИ, для идентификации указанного образца указанной отобранной колонии микроорганизмов;
где способ дополнительно включает автоматизированные этапы:
- получения второй капли указанной суспензии образца;
- нанесения указанной второй капли суспензии образца на тестовую чашку для культивирования; и
- переноса указанной тестовой чашки для культивирования в аппарат для осуществления анализа восприимчивости к антибиотикам или другого дополнительного анализа.
2. Способ по п. 1, дополнительно включающий автоматизированный этап нанесения капли раствора матрицы МАЛДИ на часть образца, нанесенного на мишень.
3. Способ по п. 2, где указанной капле суспензии образца, нанесенной на мишень, позволяют высохнуть перед нанесением указанной капли раствора матрицы МАЛДИ.
4. Способ по п. 1, где в случае, если инструкции по обработке для отобранной колонии микроорганизмов указывают на получение суспензии образца указанной колонии микроорганизмов, способ включает этап автоматического получения суспензии образца колонии микроорганизмов, включающий автоматизированные этапы:
- с помощью указанного позиционирующего устройства - установки дополнительного инструмента для отбора колоний в начальное положение над чашкой для культивирования, автоматического опускания дополнительного инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора дополнительного образца указанного микроорганизма, автоматического подъема дополнительного инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса; с помощью указанного устройства для переноса - автоматического переноса указанного дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, расположенной в держателе суспензионной пробирки, опускания указанного дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке; с помощью устройства для переноса - осуществления колебательных движений дополнительным инструментом для отбора колоний путем линейного вертикального движения в период времени, когда дополнительный инструмент для отбора колоний с дополнительным образцом указанного микроорганизма погружен в суспензионную среду; и после того, как указанный период времени истек, - поднятия дополнительного инструмента для отбора колоний из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания; по меньшей мере после того, как истек период времени, когда дополнительное устройство для переноса осуществляет колебательные движения, - измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечения дополнительного значения окончательного измерения, указывающего на измеренную мутность; и выполнение этапов способа по п. 1.
5. Способ по п. 1, включающий этап обеспечения автоматического устройства для установки и удаления чашки для культивирования для автоматической установки и удаления чашки для культивирования, содержащей микроорганизм, на подставку и с нее соответственно, при этом этап установки контроллера осуществляют таким образом, что его присоединяют с возможностью связи к автоматическому устройству для установки и удаления чашки для культивирования для управления автоматическим устройством для установки и удаления чашки для культивирования, при этом этап установки чашки для культивирования, содержащей указанный микроорганизм, на подставку осуществляют автоматически под управлением контроллера.
6. Способ по п. 5, где контроллер устанавливают таким образом, что имеется возможность автоматически удалить чашку для культивирования с подставки с помощью автоматического устройства для установки и удаления чашки для культивирования только после обеспечения сигнала о том, что суспензионную пробирку с суспензией можно удалить из держателя суспензионной пробирки для дальнейшей обработки.
7. Способ по п. 1, включающий этап обеспечения автоматического устройства для установки и удаления суспензионной пробирки для автоматической установки и удаления суспензионной пробирки в держатель суспензионной пробирки и из него соответственно, при этом этап установки контроллера осуществляют таким образом, что его присоединяют с возможностью связи к автоматическому устройству установки и удаления суспензионной пробирки для управления работой автоматического устройства для установки и удаления суспензионной пробирки, где этап установки суспензионной пробирки в держатель суспензионной пробирки осуществляют автоматически под контролем контроллера.
8. Способ по п. 7, где контроллер устанавливают таким образом, что держатель суспензионной пробирки автоматически удаляют из держателя суспензионной пробирки с помощью автоматического устройства для установки и удаления суспензионной пробирки только после обеспечения сигнала о том, что суспензионную пробирку с суспензией можно удалить из держателя суспензионной пробирки для дальнейшей обработки.
9. Способ по п. 1, включающий этап обеспечения идентификационной маркировки на суспензионной пробирке и этап хранения идентификационной маркировки указанной суспензионной пробирки вместе с характеристиками суспензии с привязкой к идентификатору чашки для культивирования, с которой была получена отобранная колония микроорганизмов, в памяти компьютера центрального управления.
10. Аппарат для автоматического получения суспензии образца микроорганизмов для осуществления способа или этапа способа для автоматического получения суспензии образца микроорганизмов по п. 9, при этом указанный аппарат включает:
- подставку для чашки для культивирования, содержащую указанный микроорганизм;
- первый и дополнительный инструмент для отбора колоний и позиционирующее устройство с держателем инструмента для отбора колоний для расположения инструмента для отбора колоний, при этом указанное позиционирующее устройство устанавливают для установки инструмента для отбора колоний в начальное положение над чашкой для культивирования и для автоматического опускания и подъема инструмента для отбора колоний по направлению к чашке для культивирования и от нее, а также для установки инструмента для отбора колоний в положение переноса, соответственно;
- держатель суспензионной пробирки для расположения суспензионной пробирки;
- автоматический дозатор суспензионной среды для автоматического дозирования суспензионной среды в суспензионную пробирку, расположенную в держателе суспензионной пробирки;
- устройство для переноса для автоматического переноса инструмента для отбора колоний из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, расположенной в держателе для суспензионной пробирки, а также для опускания и подъема инструмента для отбора колоний в и из суспензионной среды, содержащейся в суспензионной пробирке, а также для установки инструмента для отбора колоний в положение ожидания над суспензионной пробиркой, расположенной в держателе суспензионной пробирки, соответственно;
- турбидиметр для осуществления измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, и для обеспечения значения окончательного измерения, указывающего на измеренную мутность;
- контроллер, соединенный с возможностью связи с позиционирующим устройством, устройством для переноса, автоматическим дозатором суспензионной среды и турбидиметром, для автоматического управления движением позиционирующего устройства, движением устройства для переноса, работой автоматического дозатора суспензионной среды и работой турбидиметра соответственно;
- указанный контроллер устанавливают для:
а) определения, является ли значение окончательного измерения большим, чем первое пороговое значение, ранее сохраненное в памяти контроллера, если да, то контроллер устанавливают для выполнения этапа b); или является ли значение окончательного измерения равным или меньшим, чем первое пороговое значение, или равным или большим, чем второе пороговое значение, ранее сохраненное в памяти контроллера, является ли указанное первое пороговое значение равным или большим, чем второе пороговое значение, и если да, то контроллер устанавливают для выполнения этапа с); или является ли значение окончательного измерения меньшим, чем второе пороговое значение, если да, то контроллер устанавливают для выполнения этапа d);
b) контролирования автоматического дозатора суспензионной среды для подачи дополнительного количества суспензионной среды в суспензионную пробирку;
c) обеспечения сигнала о том, что суспензионную пробирку с суспензионной средой можно удалить из держателя суспензионной пробирки для дальнейшей обработки; или
d) установки указанного дополнительного инструмента для отбора колоний в держатель инструмента для отбора колоний позиционирующего устройства; с помощью указанного позиционирующего устройства - установка дополнительного инструмента для отбора колоний в начальное положение над чашкой для культивирования, автоматическое опускание дополнительного инструмента для отбора колоний по направлению к чашке для культивирования для контакта с микроорганизмом для сбора дополнительного образца указанного микроорганизма, автоматический подъем дополнительного инструмента для отбора колоний с указанным образцом микроорганизма в направлении от чашки для культивирования в положение переноса; с помощью указанного устройства для переноса - автоматический перенос указанного дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма из положения переноса позиционирующего устройства в положение над суспензионной пробиркой, расположенной в держателе суспензионной пробирки, опускание указанного дополнительного инструмента для отбора колоний с дополнительным образцом микроорганизма в суспензионную среду, содержащуюся в суспензионной пробирке, так, что образец погружается в суспензию; и после того, как указанный период времени истек, поднятия дополнительного инструмента для отбора колоний из суспензионной среды, содержащейся в суспензионной пробирке, в положение ожидания; измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра и обеспечение дополнительного значения окончательного измерения, указывающего на измеренную мутность; и осуществление этапа а).
11. Аппарат для автоматического получения суспензии образца микроорганизмов по п. 10, где контроллер устанавливают для управления работой турбидиметра таким образом, чтобы этап измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра начинался раньше, чем инструмент для отбора колоний погружают в суспензионную среду, содержащуюся в суспензионной пробирке.
12. Аппарат для автоматического получения суспензии образца микроорганизмов по п. 10, где контроллер устанавливают так, что этап измерения мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра дополнительно выполняют во время периода времени, когда устройство для переноса осуществляет колебательные движения,
при этом турбидиметр устанавливают таким образом, чтобы обеспечить контроллер значением измерения, указывающим на значение мутности, в режиме реального времени в течение периода времени, во время которого инструмент для отбора колоний осуществляет колебательные движения;
где управление работой турбидиметра осуществляют таким образом, чтобы измерение мутности суспензионной среды, содержащейся в суспензионной пробирке, расположенной в держателе суспензионной пробирки, с помощью турбидиметра начиналось раньше, чем инструмент для отбора колоний погружают в суспензионную среду, содержащуюся в суспензионной пробирке.
| DE 102004020885 A1, 24.11.2005 | |||
| WO 2012004545 A1, 12.01.2012 | |||
| US 2012009558 A1, 12.01.2012 | |||
| DE 10013513 A1, 19.10.2000 | |||
| МЕХАНИЧЕСКАЯ ТРАМБОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ИСКУССТВЕННЫХ ЖЕРНОВОВ | 1923 |
|
SU1033A1 |

