Изобретение относится к области медицинской рентгеновской техники и может быть использовано в компьютерной томографии, в том числе, малоракурсной конусно-лучевой томографии (т.н. «томосинтез»), для получения информативного трехмерного изображения в тех случаях, когда объект исследования содержит металлические включения.
Известен способ получения трехмерного изображения объекта, содержащего, по меньшей мере, одно металлическое включение, включающий получение синограммы исходного изображения объекта, сегментирование областей с металлическими включениями на основе алгоритма бинаризации по одинарному или двойному порогу, вычитание синограммы металлических включений из синограммы исходного изображения объекта, заполнение вычтенных областей с использованием методов перерисовки, основанных на наложении изображений или алгебраической интерполяции, и реконструкцию изображения объекта с помощью метода фильтрованных обратных проекций (см. Бессонов В.Б. и др. «Разработка метода коррекции металлических артефактов при томографических исследованиях», «Физические основы приборостроения», 2020, т.9, №4(38), стр. 54-59 [1]).
Недостаток известного способа состоит в удалении с изображения объекта не только металлических артефактов (следов металла), но и самих металлических включений, что снижает его информативность.
Известен способ получения трехмерного изображения объекта, содержащего, по меньшей мере, одно металлическое включение, включающий получение массива проекционных изображений объекта, каждое из которых соответствует определенному ракурсу съемки, сегментацию металла с получением массива двухмерных бинарных масок металла, получение массива проекционных изображений без металла путем заполнения металлических областей на проекционных изображениях с помощью интерполяции на двухмерной сетке, получение трехмерной бинарной маски металла с помощью обратного проецирования массива двухмерных бинарных масок металла и последующей пороговой бинаризации, реконструкцию трехмерного изображения объекта без металла и его следов из массива проекционных изображений без металла с помощью метода фильтрованных обратных проекций, реконструкцию трехмерного изображения объекта с металлом и его следами из массива исходных проекционных изображений с помощью метода фильтрованных обратных проекций и объединение полученного трехмерного изображения объекта без металла и его следов с полученным трехмерным изображением объекта с металлом и его следами с использованием трехмерной бинарной маски металла с получением итогового трехмерного изображения объекта (см. Zhaoxia Zhang et al. «Metal artifacts reduction for tomosynthesis», 2014, IEEE, pp.213-216 [2]).
Недостаток известного способа состоит в необходимости построения двух полноценных реконструкций объекта, что приводит к неоправданному увеличению временных затрат на подавление металлических артефактов.
Известный способ принят в качестве ближайшего аналога заявленного способа.
Техническая проблема, решаемая заявленным изобретением, состоит в создании способа получения трехмерного изображения объекта, содержащего, по меньшей мере, одно металлическое включение, позволяющего получить высокоинформативное трехмерное изображение объекта, в как можно меньшей степени увеличивая временные затраты на реконструкцию.
При этом достигается технический результат, заключающийся в существенном уменьшении количества металлических артефактов на трехмерном изображении объекта при относительно незначительных временных затратах на их подавление.
Техническая проблема решается, а указанный технический результат достигается в результате создания способа получения трехмерного изображения объекта, содержащего, по меньшей мере, одно металлическое включение, включающего получение массива проекционных изображений объекта, каждое из которых соответствует определенному ракурсу съемки, получение массива двухмерных карт вероятности присутствия металла, получение массива двухмерных бинарных масок металла, получение трехмерной карты вероятности присутствия металла, получение трехмерной бинарной маски металла и его следов, получение трехмерной бинарной маски металла, получение массива проекционных изображений без металла, реконструкцию трехмерного изображения объекта без металла и его следов из массива проекционных изображений без металла, реконструкцию трехмерного изображения металла и его следов и объединение полученного трехмерного изображения объекта без металла и его следов с полученным трехмерным изображением металла и его следов с получением итогового трехмерного изображения объекта. Для реконструкции трехмерного изображения металла и его следов в качестве начального приближения берут трехмерное изображение без металла и его следов и, используя массив проекционных изображений, итерационно уточняют искомое трехмерное изображение, обновляя на каждой итерации значения сигналов только в вокселях металла и его следов.
В частном варианте выполнения, массив двухмерных карт вероятности присутствия металла получают с помощью по меньшей мере одной из операций, выбранной из группы, включающей в себя фильтрацию изображения, пороговую обработку изображения, выделение границ на изображении, использование предварительно обученной глубокой нейронной сети.
В другом частном варианте выполнения, массив двухмерных бинарных масок металла получают путем пороговой бинаризации массива двухмерных карт вероятности присутствия металла.
В еще одном частном варианте выполнения, трехмерную карту вероятности присутствия металла получают путем обратного проецирования массива двухмерных карт вероятности присутствия металла.
В еще одном частном варианте выполнения, трехмерную карту вероятности присутствия металла получают путем обратного проецирования массива двухмерных бинарных масок металла.
В еще одном частном варианте выполнения, трехмерную бинарную маску металла и его следов получают путем пороговой бинаризации трехмерной карты вероятности присутствия металла.
В еще одном частном варианте выполнения, трехмерную бинарную маску металла получают путем пороговой бинаризации трехмерной карты вероятности присутствия металла.
В еще одном частном варианте выполнения, после получения трехмерной бинарной маски металла корректируют массив двухмерных бинарных масок металла с помощью прямого проецирования трехмерной бинарной маски металла.
В еще одном частном варианте выполнения, массив проекционных изображений без металла получают путем замены значений сигналов в пикселях металла новыми значениями, рассчитанными исходя из значений сигналов в пикселях окружающей металл области изображения.
В еще одном частном варианте выполнения, массив проекционных изображений без металла получают с помощью, по меньшей мере, одного из алгоритмов, выбранного из группы, включающей в себя фильтрацию изображения, полиномиальную интерполяцию порядка n на двухмерной сетке, использование предварительно обученной глубокой нейронной сети.
В еще одном частном варианте выполнения, на проекционных изображениях без металла к значениям сигналов в пикселях металла добавляют искусственно сгенерированный шум.
В еще одном частном варианте выполнения, после реконструкции трехмерного изображения объекта без металла и его следов повторно получают массив проекционных изображений без металла путем замены значений сигналов в пикселях металла на результаты прямого проецирования в эти пиксели ранее полученного трехмерного изображения объекта без металла и его следов, а затем используют полученный таким образом массив проекционных изображений без металла для уточнения реконструкции трехмерного изображения объекта без металла и его следов.
В еще одном частном варианте выполнения, реконструкцию трехмерного изображения металла и его следов получают из массива скорректированных проекционных изображений, которые получают путем вычитания из значений сигналов пикселей металла на исходных проекционных изображениях значений сигналов соответствующих пикселей из массива проекционных изображений без металла.
В еще одном частном варианте выполнения, объединение полученного трехмерного изображения объекта без металла и его следов с полученным трехмерным изображением металла и его следов производят путем замены на изображении объекта без металла и его следов сигналов в вокселях металла, в соответствии с трехмерной бинарной маской металла, на сигналы из соответствующих вокселей трехмерного изображения металла и его следов.
Заявленный способ проиллюстрирован графическими изображениями.
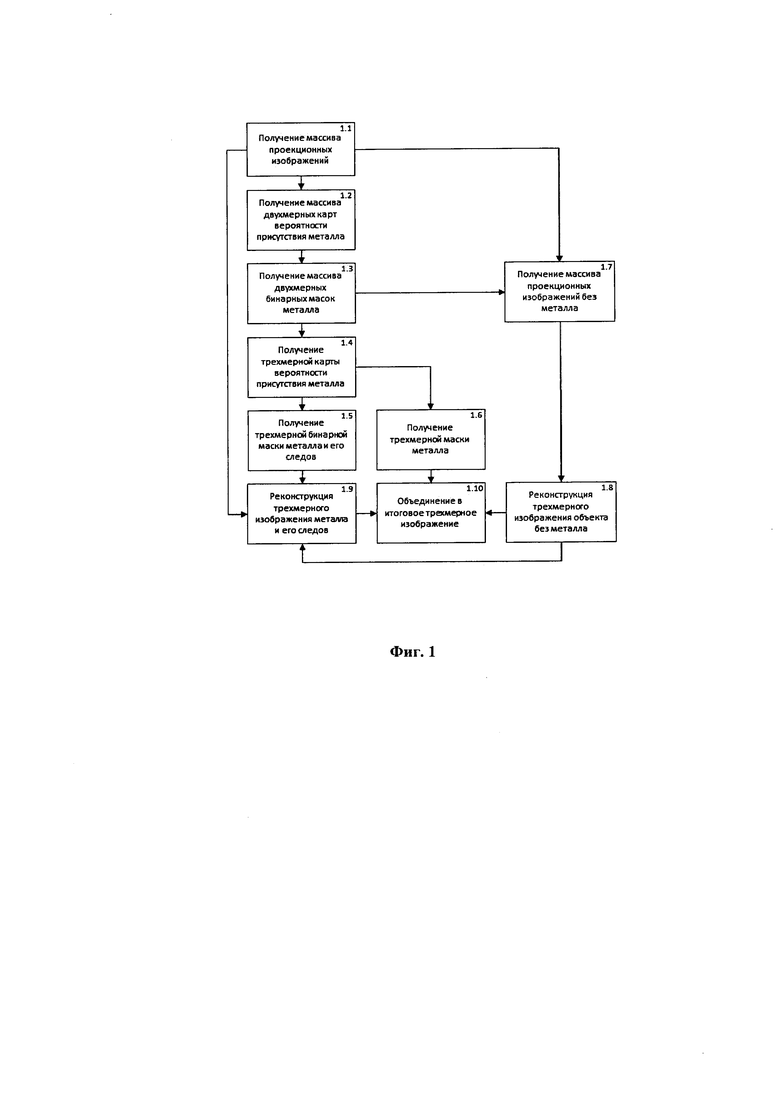
На фиг. 1 представлена блок-схема реализации заявленного способа, согласно частному варианту.
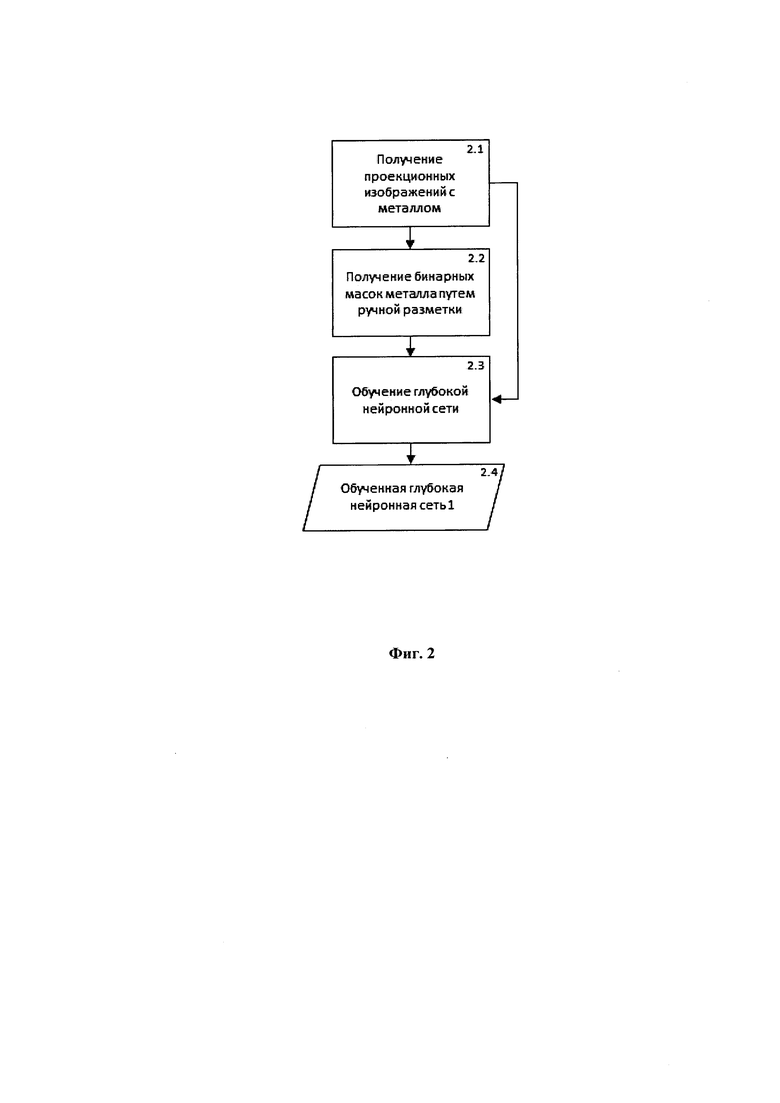
На фиг. 2 представлена блок-схема предварительного обучения глубокой нейронной сети для выполнения операции 1.2.
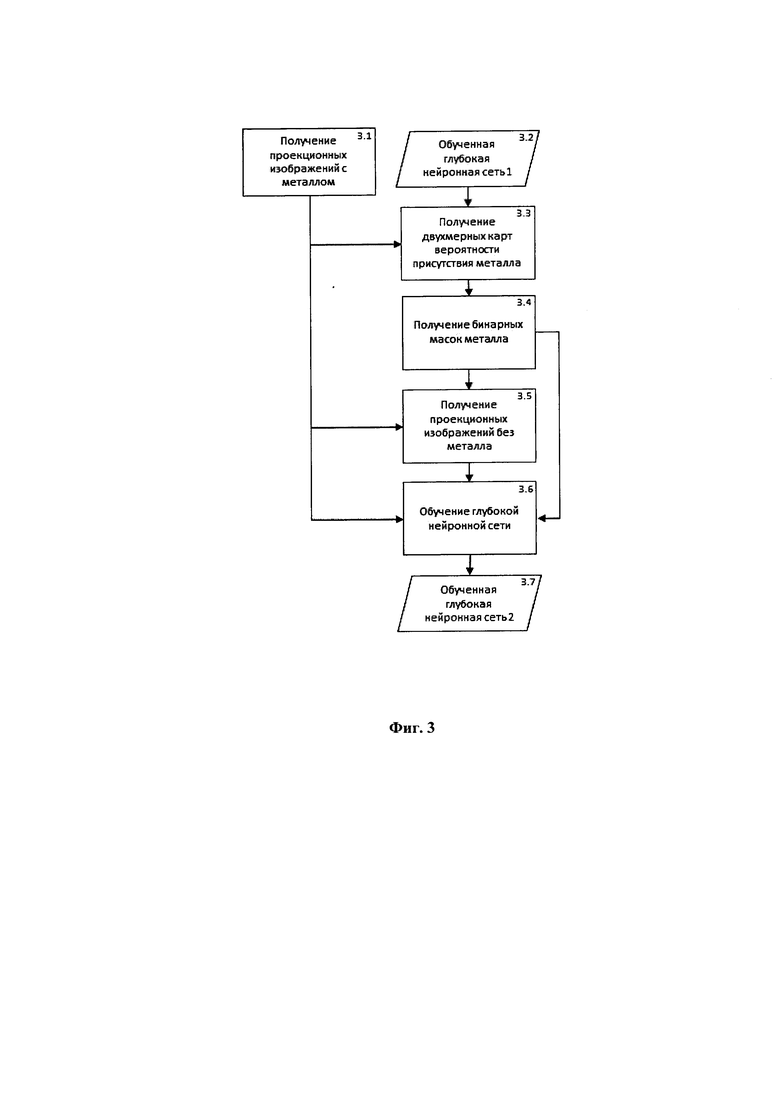
На фиг. 3 представлена блок-схема предварительного обучения глубокой нейронной сети для выполнения операции 1.7.
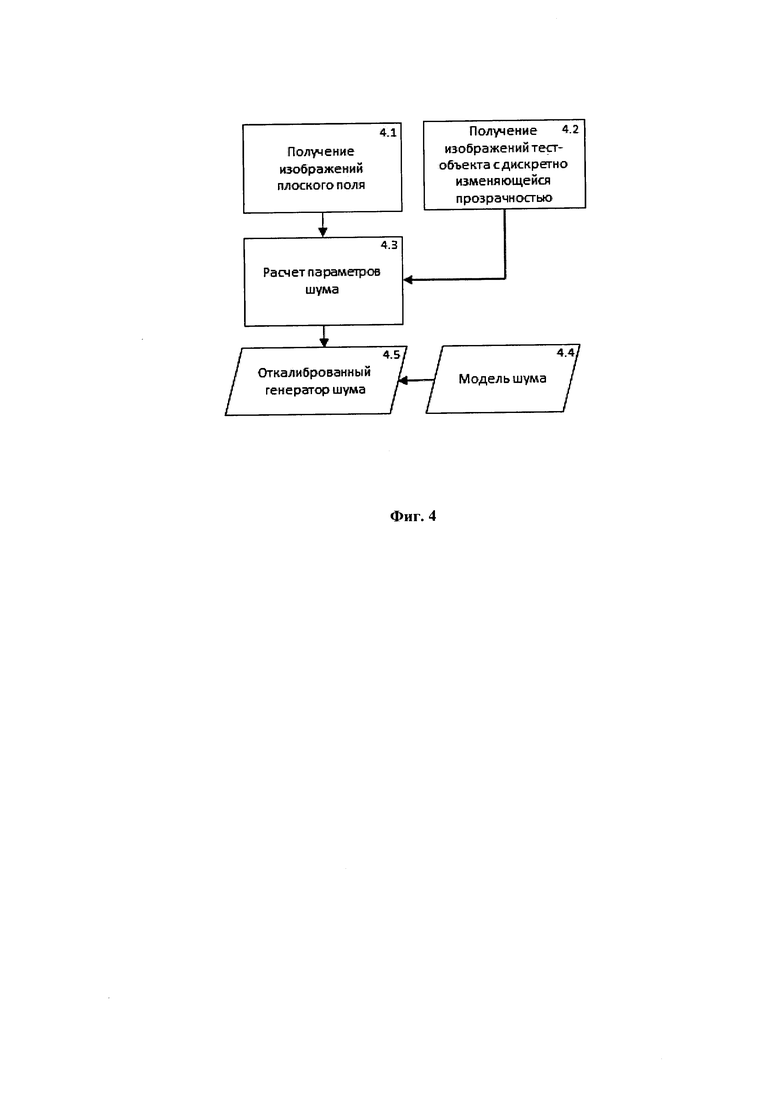
На фиг. 4 представлена блок-схема калибровки генератора шума для выполнения операции 1.7.
Заявленный способ реализуют, в частности, путем выполнения последовательности операций, показанных на фиг. 1.
1.1 Получают (например, в режиме томосинтеза) массив проекционных изображений объекта, каждое из которых соответствует определенному ракурсу съемки.
1.2 Получают массив двухмерных карт вероятности присутствия металла, например, с помощью, по меньшей мере, одной из операций, выбранной из группы, включающей в себя фильтрацию изображения, пороговую обработку изображения, выделение границ на изображении, использование предварительно обученной (см. фиг. 2) глубокой нейронной сети (см., например, Стругайло В.В. «Обзор методов фильтрации и сегментации цифровых изображений», «Наука и образование», 2012, стр. 270-281 [3]; Волков В.Ю., Турнецкий Л.С. «Пороговая обработка для сегментации и выделения протяженных объектов на цифровых изображениях», «Информационно-управляющие системы», №5,2009, стр. 10-13 [4]; Белим С.В., Ларионов С.Б. «Алгоритм формирования обучающего множества искусственной нейронной сети для сегментации изображения», «Математические структуры и моделирование», №2 (46), 2018, стр. 79-83 [5]).
1.3 Получают массив двухмерных бинарных масок металла, например, путем пороговой бинаризации массива двухмерных карт вероятности присутствия металла (см., например, Исрафилов Х.С.«Исследование методов бинаризации изображений», «Вестник науки и образования», №6 (30), т.2, 2017, стр. 43-50 [6]).
1.4 Получают трехмерную карту вероятности присутствия металла, например, путем обратного проецирования массива двухмерных карт вероятности присутствия металла или путем обратного проецирования массива двухмерных бинарных масок металла (см., например, Баранов В.А. и др. «Методы решения реконструктивных задач радиационного контроля на основе «нелинейного томосинтеза», Вестник науки Сибири, №1 (2), 2012, стр. 71-78 [7]).
1.5 Получают трехмерную бинарную маску металла и его следов, например, путем пороговой бинаризации трехмерной карты вероятности присутствия металла (см., например, [6]).
1.6 Получают трехмерную бинарную маску металла, например, путем пороговой бинаризации трехмерной карты вероятности присутствия металла (см., например, [6]).
В частном варианте, после этой операции корректируют массив двухмерных бинарных масок металла с помощью прямого проецирования (см., например, Лихачев А.В. «Алгоритмы томографической реконструкции» (учебное пособие), Новосибирск, 2013 [8]) трехмерной бинарной маски металла.
Это дополнительно позволяет повысить точность сегментации, сделав двухмерные маски взаимосогласованными.
1.7 Получают массив проекционных изображений без металла, например, с помощью, по меньшей мере, одной из операций, выбранной из группы, включающей в себя фильтрацию изображения, полиномиальную интерполяцию порядка n на двухмерной сетке, использование предварительно обученной (см. фиг. 3) глубокой нейронной сети, или путем умножения значений сигналов в пикселях металла на константу.
Данную операцию осуществляют, например, путем замены значений сигналов в пикселях металла новыми значениями, рассчитанными, исходя из значений сигналов в пикселях окружающей металл области изображения (см., например, Lin Chang, Yu Chongxiu. «New Interpolation Algorithm for Image Inpainting», «Physics Procedia», 22 (2011), pp.107-111 [9].
В частном варианте, к значениям сигналов в пикселях металла могут добавлять искусственно сгенерированный шум (см. фиг. 4), что позволяет получить более естественный вид трехмерного изображения объекта в области следов металла.
1.8 Реконструируют трехмерное изображение объекта без металла и его следов из массива проекционных изображений без металла.
В частном варианте, после этой операции повторно строят массив проекционных изображений без металла путем замены значений сигналов в пикселях металла на результаты прямого проецирования (см., например, [8]) в эти пиксели ранее полученного трехмерного изображения объекта без металла и его следов, а затем используют полученный таким образом массив проекционных изображений без металла для уточнения реконструкции трехмерного изображения объекта без металла и его следов.
Это дополнительно позволяет получить более правдоподобные проекционные изображения без металла и, вследствие этого, повысить качество получаемого трехмерного изображения без металла и его следов.
1.9 Реконструируют трехмерное изображение металла и его следов.
Получают массив двухмерных бинарных масок металла и его следов путем прямого проецирования (см. [8]) трехмерной бинарной маски металла и его следов, и последующей пороговой бинаризации (см., например, [6]) результата прямого проецирования. В качестве начального приближения трехмерного изображения металла и его следов берут трехмерное изображение без металла и его следов (см. [8]). Далее осуществляют прямое проецирование в пиксели металла и его следов, рассчитывают невязки массива двухмерных изображений в пикселях металла и его следов, а затем до выполнения критерия останова повторяют:
- обратное проецирование невязок массива двухмерных изображений в пикселях металла и его следов;
- обновление значений сигналов в вокселях металла и его следов.
- прямое проецирование в пиксели металла и его следов;
- расчет невязок массива двухмерных изображений в пикселях металла и его следов.
1.10 Объединяют полученное трехмерное изображение объекта без металла и его следов с полученным трехмерным изображением металла и его следов, например, путем замены на изображении объекта без металла и его следов сигналов в вокселях металла, в соответствии с трехмерной бинарной маской металла, на сигналы из соответствующих вокселей трехмерного изображения металла и его следов.
В результате получают итоговое трехмерное изображение объекта.
Заявленный способ в результате использования итерационного метода реконструкции в сочетании со снижением доли изображения, подвергаемого обработке, обеспечивает получение высокоинформативного трехмерного изображения объекта, содержащего, по меньшей мере, одно металлическое включение, с существенным уменьшением временных затрат на подавление металлических артефактов и, соответственно, относительно незначительном увеличении временных затрат на реконструкцию в целом по сравнению с традиционными способами реконструкции с подавлением металлических артефактов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПАКТНОЕ УСТРОЙСТВО ГОЛОГРАФИЧЕСКОГО ДИСПЛЕЯ | 2017 |
|
RU2686576C1 |
| Способ обработки снимков компьютерной томографии (КТ-снимков) | 2023 |
|
RU2812866C1 |
| Устройство создания многомерных виртуальных изображений органов дыхания человека и способ создания объёмных изображений с применением устройства | 2021 |
|
RU2783364C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СКЛАДСКИХ ПАЛЛЕТ НА ОСНОВЕ ИЗОБРАЖЕНИЙ ТРЕХМЕРНЫХ ДАТЧИКОВ | 2016 |
|
RU2656987C1 |
| ОБНАРУЖЕНИЕ СОСТОЯНИЯ С ИСПОЛЬЗОВАНИЕМ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2669656C2 |
| УСТРОЙСТВО И СПОСОБ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНОГО ОБЪЕКТА НА ОСНОВЕ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237283C2 |
| СПОСОБ ГЕНЕРИРОВАНИЯ СТРУКТУРЫ УЗЛОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237284C2 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЛАНИРОВАНИЯ ВИДОВ В ОБЪЕМНЫХ ИЗОБРАЖЕНИЯХ МОЗГА | 2013 |
|
RU2523929C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ ОБЪЕМНЫХ ОБРАЗОВАНИЙ ПОЧЕК НА КОМПЬЮТЕРНЫХ ТОМОГРАММАХ БРЮШНОЙ ПОЛОСТИ | 2024 |
|
RU2839531C1 |
| СПОСОБ СЖАТИЯ И ХРАНЕНИЯ ТРЕХМЕРНЫХ ДАННЫХ (ВАРИАНТЫ) | 2020 |
|
RU2753591C1 |
Изобретение относится к области медицинской рентгеновской техники и может быть использовано в компьютерной томографии, в том числе малоракурсной конусно-лучевой томографии, для получения информативного трехмерного изображения в тех случаях, когда объект исследования содержит металлические включения. Для получения трехмерного изображения объекта, содержащего по меньшей мере одно металлическое включение, получают массив проекционных изображений объекта, каждое из которых соответствует определенному ракурсу съемки. Получают массив двухмерных карт вероятности присутствия металла. Получают массив двухмерных бинарных масок металла. Получают трехмерную карту вероятности присутствия металла. Получают трехмерную бинарную маску металла и его следов. Получают трехмерную бинарную маску металла. Получают массив проекционных изображений без металла. Реконструируют трехмерное изображение объекта без металла и его следов из массива проекционных изображений без металла. Реконструируют трехмерное изображение металла и его следов и объединяют полученное трехмерное изображение объекта без металла и его следов с полученным трехмерным изображением металла и его следов с получением итогового трехмерного изображения объекта. Для реконструкции трехмерного изображения металла и его следов в качестве начального приближения берут трехмерное изображение без металла и его следов и, используя массив проекционных изображений, итерационно уточняют искомое трехмерное изображение, обновляя на каждой итерации значения сигналов только в вокселях металла и его следов. Изобретение позволяет существенно уменьшить количество металлических артефактов на трехмерном изображении объекта при относительно незначительных временных затратах на их подавление. 15 з.п. ф-лы, 4 ил.
1. Способ получения трехмерного изображения объекта, содержащего по меньшей мере одно металлическое включение, включающий получение массива проекционных изображений объекта, каждое из которых соответствует определенному ракурсу съемки, получение массива двухмерных карт вероятности присутствия металла, получение массива двухмерных бинарных масок металла, получение трехмерной карты вероятности присутствия металла, получение трехмерной бинарной маски металла и его следов, получение трехмерной бинарной маски металла, получение массива проекционных изображений без металла, реконструкцию трехмерного изображения объекта без металла и его следов из массива проекционных изображений без металла, реконструкцию трехмерного изображения металла и его следов и объединение полученного трехмерного изображения объекта без металла и его следов с полученным трехмерным изображением металла и его следов с получением итогового трехмерного изображения объекта, отличающийся тем, что для реконструкции трехмерного изображения металла и его следов в качестве начального приближения берут трехмерное изображение без металла и его следов и, используя массив проекционных изображений, итерационно уточняют искомое трехмерное изображение, обновляя на каждой итерации значения сигналов только в вокселях металла и его следов.
2. Способ по п. 1, отличающийся тем, что массив двухмерных карт вероятности присутствия металла получают с помощью по меньшей мере одной из операций, выбранной из группы, включающей в себя фильтрацию изображения, пороговую обработку изображения, выделение границ на изображении, использование предварительно обученной глубокой нейронной сети.
3. Способ по п. 1, отличающийся тем, что массив двухмерных бинарных масок металла получают путем пороговой бинаризации массива двухмерных карт вероятности присутствия металла.
4. Способ по п. 1, отличающийся тем, что трехмерную карту вероятности присутствия металла получают путем обратного проецирования массива двухмерных карт вероятности присутствия металла.
5. Способ по п 1, отличающийся тем, что трехмерную карту вероятности присутствия металла получают путем обратного проецирования массива двухмерных бинарных масок металла.
6. Способ по пп. 1, 4 или 5, отличающийся тем, что трехмерную бинарную маску металла и его следов получают путем пороговой бинаризации трехмерной карты вероятности присутствия металла.
7. Способ по пп. 1 4 или 5, отличающийся тем, что трехмерную бинарную маску металла получают путем пороговой бинаризации трехмерной карты вероятности присутствия металла.
8. Способ по п. 1, отличающийся тем, что после получения трехмерной бинарной маски металла корректируют массив двухмерных бинарных масок металла с помощью прямого проецирования трехмерной бинарной маски металла.
9. Способ по п. 1, отличающийся тем, что массив проекционных изображений без металла получают путем замены значений сигналов в пикселях металла новыми значениями, рассчитанными исходя из значений сигналов в пикселях окружающей металл области изображения.
10. Способ по п. 1 или 9, отличающийся тем, что массив проекционных изображений без металла получают с помощью по меньшей мере одной из операций, выбранной из группы, включающей в себя фильтрацию изображения, полиномиальную интерполяцию порядка n на двухмерной сетке, использование предварительно обученной глубокой нейронной сети.
11. Способ по п. 1 или 9, отличающийся тем, что на проекционных изображениях без металла к значениям сигналов в пикселях металла добавляют искусственно сгенерированный шум.
12. Способ по п. 1 или 9, отличающийся тем, что после реконструкции трехмерного изображения объекта без металла и его следов повторно строят массив проекционных изображений без металла путем замены значений сигналов в пикселях металла на результаты прямого проецирования в эти пиксели ранее полученного трехмерного изображения объекта без металла и его следов, а затем используют полученный таким образом массив проекционных изображений без металла для уточнения реконструкции трехмерного изображения объекта без металла и его следов.
13. Способ по п. 1, отличающийся тем, что массив проекционных изображений без металла получают путем умножения значений сигналов в пикселях металла на константу.
14. Способ по п. 13, отличающийся тем, что при реконструкции трехмерного изображения объекта без металла и его следов итерационным методом учитывают невязки только в пикселях, не относящихся к металлу.
15. Способ по п. 1, или 9, или 14, отличающийся тем, что реконструкцию трехмерного изображения металла и его следов производят из массива скорректированных проекционных изображений, которые получают путем вычитания из значений сигналов пикселей металла на исходных проекционных изображениях значений сигналов соответствующих пикселей из массива изображений, полученных путем прямого проецирования трехмерного изображения объекта без металла и его следов.
16. Способ по п. 1, отличающийся тем, что объединение полученного трехмерного изображения объекта без металла и его следов с полученным трехмерным изображением металла и его следов производят путем замены на изображении объекта без металла и его следов сигналов в вокселях металла, в соответствии с трехмерной бинарной маской металла, на сигналы из соответствующих вокселей трехмерного изображения металла и его следов.
| US 2016371862 А1, 22.12.2016 | |||
| US 6721387 B1, 13.04.2004 | |||
| WO 2019145149 A1, 01.08.2019 | |||
| US 2017178307 A1, 22.06.2017. |
