Изобретение относится к измерительной технике и предназначено для создания образцовой измерительной аппаратуры для контроля сигналов тензорезисторных датчиков с погрешностью менее 0,01%. Одной из основных проблем является метрологическая аттестация такой аппаратуры, учитывая, что ее точность должна находиться в пределах (0,005…0,0005) % от предела, исключалась возможность аттестации с помощью потенциометров постоянного тока и компараторов, т.к. их точность ограничена величиной 0,005%, сравнимой с точностью разрабатываемой аппаратуры. Единственный вариант решения этой проблемы - создание имитаторов выходных сигналов датчиков с временной стабильностью (0,0025…0,0001) %, которая и определяет их точность. Реализация имитаторов с помощью известных средств исключена, т.к. лучшие образцы магазинов сопротивлений имеют класс точности 0,05%. Единственная возможность изготовления таких имитаторов - использование монолитных мостовых структур из константановой фольги, т.к. был опыт их использования для создания высокоточных тензорезисторных датчиков с погрешностью не более 0,02%.
Поставленная задача требовала создания новой топологии мостовой схемы, использования новых материалов для крепления и герметизации разрабатываемой матрицы.
Наиболее близким по техническому решению к изобретению является тензорезисторный датчик силы, в котором использован упругий элемент (в терминах заявки-подставка) из специальных сталей типа 40Х, 40X13 и т.п., на котором закреплен монолитный мост из фольги с набором регулировочных резисторов: два-внутри моста для его балансировки и два-снаружи для регулировки выходного сигнала [1]. Недостатками этой конструкции являются: различие ТКЛР константановой фольги и ТКЛР упругого элемента, а также его большой ТКЕ модуля упругости, что обуславливает температурные дрейфы нуля и рабочего коэффициента передачи, а также невозможность регулировки всех плеч моста.
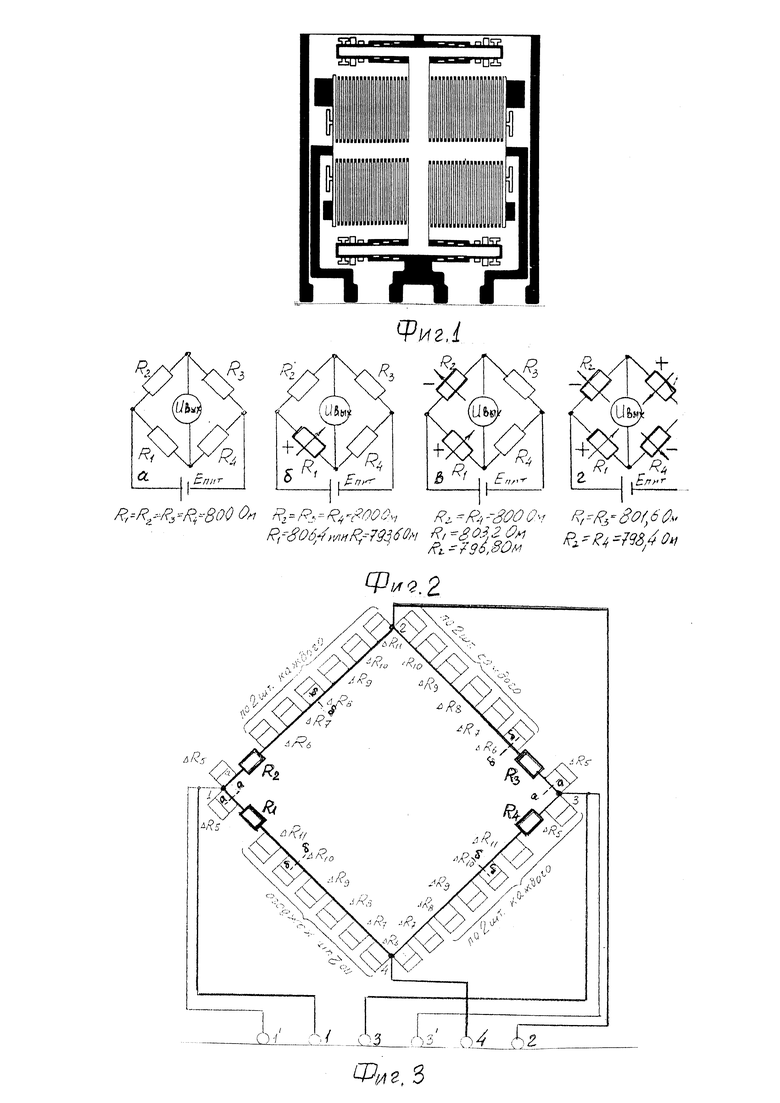
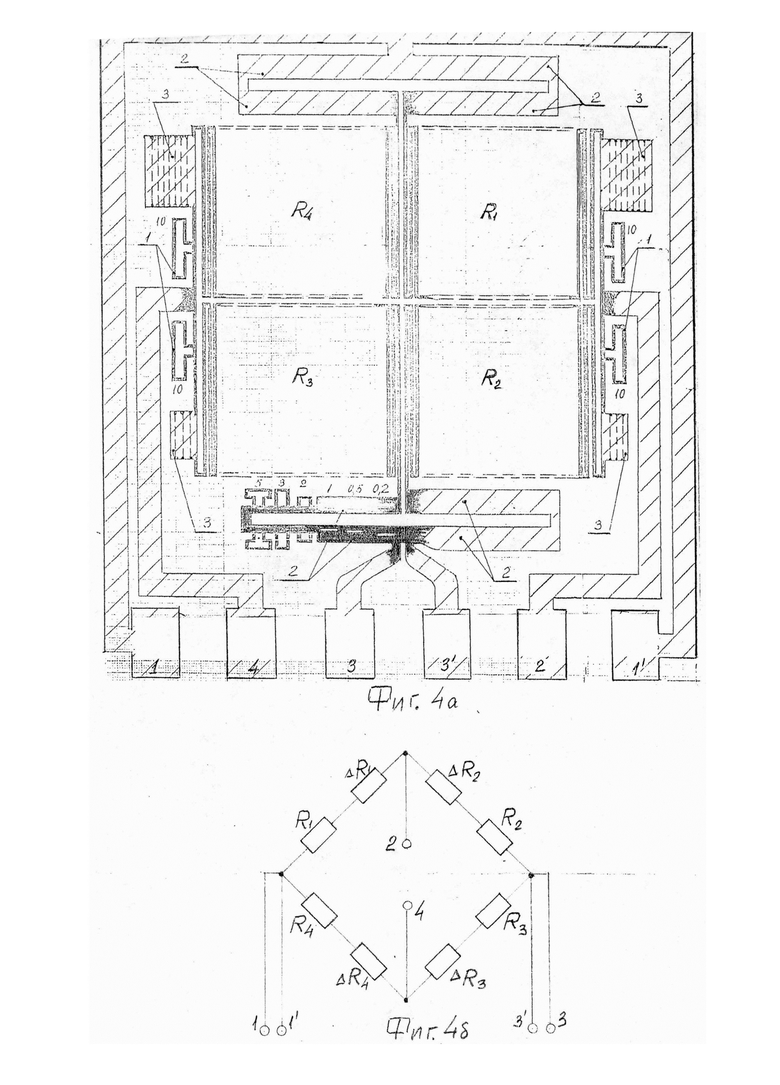
Цель изобретения заключалась в создании на основе единой матрицы четырех образцовых, стабильных во времени имитаторов: трех - с 1,2 и 4-мя рабочими плечами и рабочими коэффициентами передачи (РКП)=2 мВ/В и одного с РКП=0. Поставленная цель была достигнута так: подставку, на которой крепилась матрица, изготавливали из того же материала, что и матрицу. Это позволило устранить температурные дрейфы и повысить стабильность имитатора, а матрицу моста резисторов изготавливали в такой конфигурации: исходные величины 4-х резисторов моста делали на (1,2…1,3) % меньше их номинального значения Rн (если Rн=800 Ом, то R1=R2=R3=R4=790 Ом), а для корректировки их сопротивлений в каждое плечо моста включили, зашунтированные в исходном положении, секции грубой и тонкой регулировок. Топология базовой матрицы для имитаторов 4-х типов представлена на Фиг. 1. Здесь: R1…R4 резисторы мостовой схемы, ΔRтр - магазины сопротивлений для грубой регулировки РКП с номиналами сопротивлений - 5;3;2;1;0,5;0,2 Om; ΔRтр - магазины сопротивлений для тонкой регулировки РКП с номиналами 0,2 Ом и менее; R5 - резисторы номиналом 10 Ом. На Фиг. 2а-электрическая схема имитатора с РКП=0, на 26-имитатора с одним, на 2в-с двумя, на 2 г-с четырьмя рабочими плечами, у всех РКП=2 мВ/В. Принципиальная электрическая схема матрицы показана на Фиг. З (обозначения те же, что на Фиг. 1). Все резисторы матрицы изготовлены из одного листа константановой фольги толщиной 5 мкм. Клеммы 1,3 служат для подключения источника питания - Е пит., а клеммы 1',3' служат для его контроля, клеммы 2,4 используются для съема выходного сигнала (РКП). На Фиг. 4а - представлена топология замкнутого моста (см. Фиг. 1) в увеличенном масштабе с расшифровкой элементов, где: R1=R2=R3=R4=790 Ом - исходные сопротивления плеч моста для Rн=800 Ом (обозначения те же). Для создания 4-х имитаторов в плечи моста вводят, путем реза шунтирующих шин регулировочных резисторов, в одно, два или четыре плеча необходимое количество секций грубой и тонкой регулировок: таким образом имитируются выходные сигналы (РКП), возникающие при нагружении датчика номинальным усилием, давлением и т.п. Общая величина, дополнительно включаемых в активные плечи моста секций, определяется из выpaжeния ΔR=±K×Rн×N, где: К-РКП моста, его величина может быть различной, обычно К=2 мВ/В=2×10; RH-номинальное сопротивление плеча; N=1, 2, 4 для мостов с 4, 2 и 1-им рабочим плечом. Для создания имитатора с РКП=0 путем тонких регулировок выполнялось условие баланса моста: R1=R2=R3=R4=Rн.
Изготовление имитаторов сводится к следующей последовательности операций. Из листа фольги, снабженного клеевой подложкой, травлением изготавливали матрицы имитаторов, производили их разбраковку и, на годных, осуществляли регулировку 4-х плеч моста путем их травления до значения 790 Ом каждого.
Настройку требуемой величины РКП имитаторов производили следующим образом. Если необходимо создать имитатор с РКП=0 прорезали шину у регулировочного резистора R5 (линии реза а-а показана на Фиг. 3), затем корректировали каждое плечо в номинал, например, в 800 Ом, путем резки шин у соответствующих подгоночных резисторов.
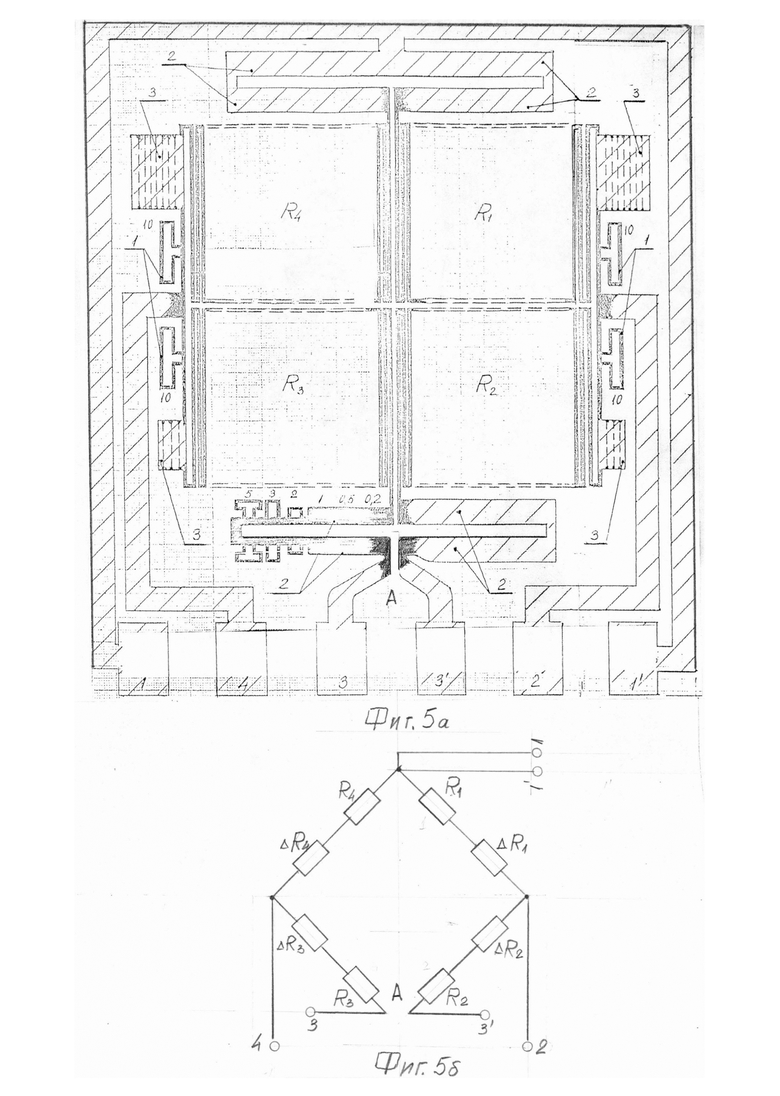
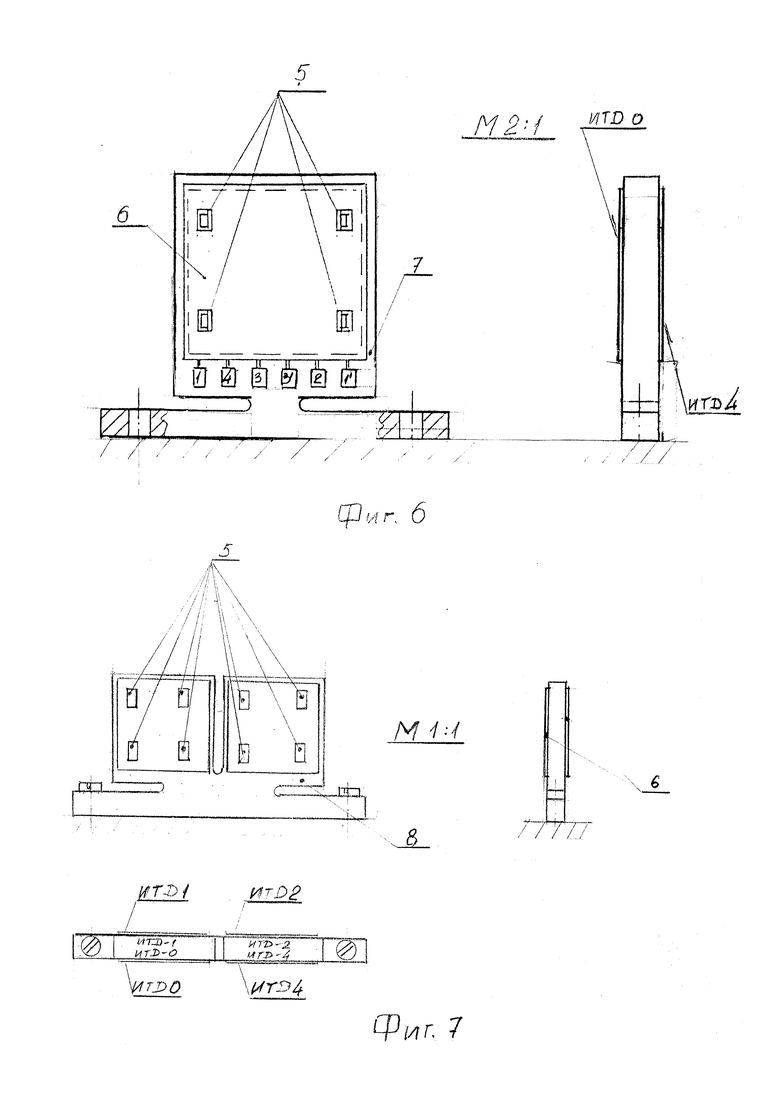
Контроль величины регулируемого плеча, для замкнутого моста (Фиг. 4а), производили с помощью устройства, описанного в [2], а для моста с открытым углом (Фиг. 5а) - обычными средствами. Для создания имитаторов с одним рабочим плечом перерезают шину у резистора R5 и шины у подгоночных резисторов доводя, например R1, до величины 806,4 Ом, либо шину резистора R5 не взрезают, а используют другие секции, доводя R1=793,6 Ом. При создании имитаторов с 2-мя и 4-мя рабочими плечами, поступают аналогично, доводя сопротивления плеч до величин R1=803,2 Ом и R2=796,8 Ом - для полумоста (2 активных плеча), а для полного моста (4-ре активных плеча) до величин R1=R3=801,6 Ом и R2=R4=798,4 Ом. После проведения регулировок, лист фольги с готовыми структурами разделяли на отдельные матрицы, которые с одной или с двух сторон наклеивали на металлическую подставку толщиной 5 мм-Фиг. 6,7, изготовленную также из константана. Затем матрицы, через слой оптически-прозрачного клея, герметизировали константановой фольгой толщиной 3 мкм, в которой ранее были сформированы четыре прямоугольных окна размерами 3,5×2,5 мм × мм для ювелирной настройки РКП до значений 0 или 2 мВ/В.
На Фиг. 1 показана матрица с размерами 24,5×27,5 мм × мм с замкнутым мостом для имитаторов 4-х типов (расшифровка обозначений дана ранее).
На Фиг. 2 - электрические схемы имитаторов: с РКП=0 и трех с РКП=2 мВ/В.
На Фиг. 3 - электрическая схема матрицы с мостом, где R1=R2=R3=R4, и наборы секций регулировочных резисторов в каждом плече моста.
На Фиг. 4а представлена топология матрицы (см. Фиг. 1) в увеличенном масштабе, где: R1=R2=R3=R4=790 Ом (для Rн=800 Ом), R5 - резистор номиналом 10 Ом, ΔRтр - секции резисторов с набором от 0,2 Ом до 5 Ом, ΔRтр-секции для ювелирных настроек. На Фиг 4б - ее эквивалентная схема.
На Фиг. 5а та же матрица с открытым углом А (разомкнутый мост), ее эквивалентная схема показана на Фиг. 5б.
На Фиг. 6-готовый блок с четырьмя окнами 5 в фольге 6 и двумя имитаторами РКП=0 и РКП=2 мВ/В, расположенными с разных сторон подставки 7.
На Фиг. 7-блок на сдвоенной подставке 8, где размещены 4 различных имитатора: один с РКП=0 мВ/В и три-с одним, двумя и четырьмя
рабочими плечами с РКП=2 мВ/В каждый.
Условное обозначение имитаторов тензорезисторных датчиков (ИТД) на Фиг. 6 и 7:
1. ИТД 0 - имитатор с РКП=0 мВ/В;
2. ИТД 1 - имитатор с РКП=2 мВ/В;
3. ИТД 2 - имитатор с РКП=2 мВ/В;
4. ИТД 4-имитатор с РКП=2 мВ/В.
Предлагаемый блок имитаторов сигналов тензорезисторных датчиков имеет преимущества в сравнении с известными за счет более высокой точности имитации величины РКП и его долговременной стабильности, а также за счет уменьшения температурных дрейфов РКП.
Источники информации, принятые автором при экспертизе:
1. Авт. свидетельство СССР №1198398, М. Кл. G01L 1/ 22, 1985, БИ №46.
2. Авт. свидетельство СССР №1341491, М. Кл. G01L 1/ 18, 1982, БИ №36.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2022 |
|
RU2807002C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2829565C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2022 |
|
RU2795669C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2023 |
|
RU2804254C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2022 |
|
RU2794992C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2023 |
|
RU2803392C1 |
| ИМИТАТОР ДИСКРЕТНОГО ДИСБАЛАНСА ТЕНЗОМЕТРИЧЕСКОГО МОСТА | 2006 |
|
RU2315325C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК ДАВЛЕНИЯ | 2024 |
|
RU2816669C1 |
| ИМИТАТОР СИГНАЛОВ МОСТОВЫХ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ | 2016 |
|
RU2620895C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2023 |
|
RU2802536C1 |
Изобретение относится к области приборостроения и предназначено для создания высокоточной измерительной аппаратуры для измерения сигналов прецизионных тензорезисторных датчиков. Сущность: блок имитаторов сигналов тензорезисторных датчиков содержит металлическую подставку, на которой закреплены имитаторы сигналов на основе матрицы из фольги, включающей четыре резистора и последовательно соединенные с ними регулировочные резисторы, объединенные в мостовую схему. Блок содержит один имитатор с рабочим коэффициентом передачи, равным нулю, и по крайней мере один из имитаторов с рабочим коэффициентом передачи, равным 2 мВ/В, с одним, двумя или четырьмя рабочим плечами. Исходные величины четырех резисторов выполнены с сопротивлением меньше номинального на (1,2…1,3)% и к ним последовательно включены секции регулировочных резисторов грубой и тонкой регулировок. Величины добавочных сопротивлений, включаемых в рабочие плечи трех мостовых схем, определены из выражения ΔR=±K⋅Rн⋅N, где К - рабочий коэффициент передачи мостовой схемы, N=1, 2, 4 для мостов с 4-мя, 2-мя и 1-м рабочим плечом, RH - номинальные сопротивления плеч моста. Для имитатора с рабочим коэффициентом передачи, равным нулю, путем тонкой регулировки 4-х плеч выполнено условие: R1=R2=R3=R4=Rн. Матрица через тонкий слой оптически прозрачного клея защищена тонкой фольгой из того же материала, что и матрица. В фольге в зонах, где в матрице располагаются регулировочные резисторы тонкой регулировки, сформированы четыре прямоугольных окна для проведения особо тонких регулировок рабочих плеч. Технический результат: возможность создания на единой матрице 4-х различных имитаторов высокой точности, надежности и долговременной стабильности с малыми величинами дрейфа нуля. 1 з.п. ф-лы, 7 ил.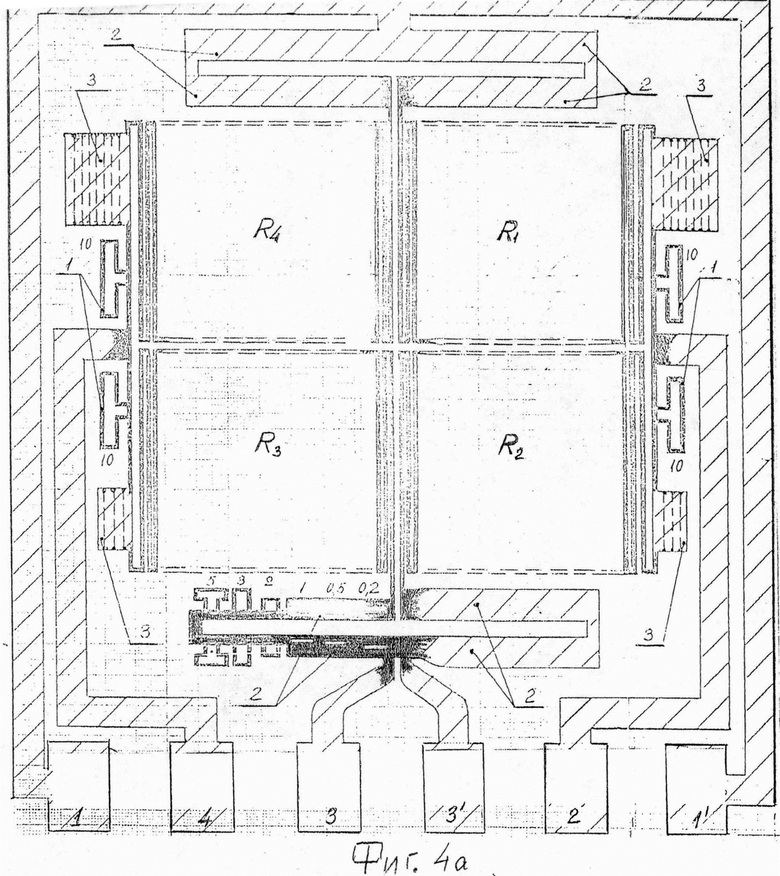
1. Блок имитаторов сигналов тензорезисторных датчиков, содержащий металлическую подставку, на которой закреплен имитатор сигналов на основе матрицы из фольги, включающей четыре резистора и последовательно соединенные с ними регулировочные резисторы, объединенные в мостовую схему, отличающийся тем, что металлическая подставка выполнена из того же материала, что и матрица, а блок содержит один имитатор с рабочим коэффициентом передачи, равным нулю, и по крайней мере один из имитаторов с рабочим коэффициентом передачи, равным 2 мВ/В, с одним, двумя и четырьмя рабочим плечами, при этом исходные величины четырех резисторов выполнены с сопротивлением меньше номинального на (1,2…1,3)% и к ним последовательно включены секции регулировочных резисторов грубой и тонкой регулировок, величины добавочных сопротивлений, включаемых в рабочие плечи трех мостовых схем, определены из выражения ΔR=±K⋅Rн⋅N, где К - рабочий коэффициент передачи мостовой схемы, N=1, 2, 4 для мостов с 4-мя, 2-мя и 1-м рабочим плечом, RH - номинальные сопротивления плеч моста, а для имитатора с рабочим коэффициентом передачи, равным нулю, путем тонкой регулировки 4-х плеч выполнено условие: R1=R2=R3=R4=Rн.
2. Блок имитаторов сигналов тензорезисторных датчиков по п. 1, отличающийся тем, что матрица через тонкий слой оптически прозрачного клея защищена тонкой фольгой из того же материала, что и матрица, и в фольге в зонах, где в матрице располагаются регулировочные резисторы тонкой регулировки, сформированы четыре прямоугольных окна для проведения особо тонких регулировок рабочих плеч.
| Тензорезисторный датчик силы | 1984 |
|
SU1198398A1 |
| ЧЕТЫРЕХПРОВОДНЫЙ ИМИТАТОР ДИСКРЕТНОГО ПРИРАЩЕНИЯ СОПРОТИВЛЕНИЯ ТЕНЗОРЕЗИСТОРА | 2003 |
|
RU2251115C1 |
| СПОСОБ ФИКСАЦИИ УЗЛОВ НА КАПРОНОВЫХ СЕТЕМАТЕРИАЛАХ | 0 |
|
SU196707A1 |
| ИМИТАТОР СИГНАЛОВ МОСТОВЫХ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ | 2021 |
|
RU2772738C1 |
| СИНЕРГИЧЕСКАЯ ПРОТИВОТУБЕРКУЛЕЗНАЯ ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ, СОДЕРЖАЩАЯ ЦИКЛОСЕРИН И ЦИНКОСОДЕРЖАЩЕЕ СОЕДИНЕНИЕ | 2016 |
|
RU2620857C1 |
| CN 201177531 Y, 07.01.2009. | |||
