Изобретение относится к космической медицине, в частности к способам моделирования физиологического состояния, вызываемого условиями невесомости или пониженной весомости ("лунная", "марсианская" и другие гравитации). Наиболее эффективно изобретение может быть использовано для моделирования нейровестибулярных нарушений, наблюдаемых во время космических полетов (тошнота, рвота, головокружение при перемещении, головокружение при стоянии, потеря аппетита, нечеткость зрения, трудности с концентрацией внимания) снижающих работоспособность космонавтов.
Изобретение может быть использовано в биомедицинских исследованиях для выявления основных закономерностей развития гравитационно-зависимых патологических процессов, разработки методов профилактики нейровестибулярных нарушений у пациентов с синдромом укачивания (кинетозами).
В настоящее время известен ряд способов моделирования эффектов измененной гравитации в наземных условиях. Известен способ моделирования невесомости с использованием полетов на самолете-лаборатории по параболе Кеплера (Shelhamer M. Parabolic flight as a spaceflight analog // J Appl Physiol. 1985. 2016. Vol. 120, №12. P. 1442-1448). Условия невесомости, воспроизводимые на самолете-лаборатории, наиболее близки к условиям реального космического полета. В зоне выполнения полетов самолет летит горизонтально на высоте шесть тысяч метров. Затем самолет с ускорением начинает набирать высоту под углом 45 градусов. Во время перехода с горизонтального полета на восходящий участок кривой и движении самолета через ее вершину создается режим кратковременной невесомости продолжительностью до 25 секунд за один режим. В одном полете продолжительностью 1,5 часа выполняется до 15 режимов невесомости, то есть общее пребывание в невесомости составляет примерно 450 секунд. Для имитации условий невесомости созданы специализированные самолеты национальным центром по исследованиям космического пространства Франции (А300 ZERO-G), европейским космическим агентством (Airbus А-300 "Zero-g"), российским космическим агентством (Ил-76МДК).
Недостатком данного метода является сравнительная кратковременность периода невесомости, а также то, что до и после состояния кратковременной невесомости космонавт испытывает действие ускорения от 1 до 3 g. Для исследования эффектов невесомости на животных данный способ экономически не выгоден; он не позволяет проводить эксперименты, моделирующие длительные космические полеты и не позволяет моделировать лунную, марсианскую и любую другую весомость.
Известен способ моделирования невесомости при помощи микрогравитационных башен. Например, микрогравитационная башня в городе Бремен (drop tower) является главной лабораторией Центра прикладных космических технологий и микрогравитации Бременского университета (Machemer H, Braucker R, Takahashi K, Murakami A. Short-term microgravity to isolate graviperception in cells // Microgravity Sci Technol. 1992. Vol. 5, №3. P. 119-123). В основе башни находится вертикальная стальная труба длиной 110 м с верхней точки которой сбрасывается капсула, падающая в резервуар с полистирольным зерном. Во время падения создается невесомость длительностью 9 секунд. Следует указать на то, что в первую очередь в такой башне проходит испытания техники и технологии ракетно-космического назначения. Биологические исследования ограничены такими объектами, как растения, дафнии, водоросли, рыбы, грибы, клеточные культуры, вследствие высокой травматичности метода при использовании животных. Недостатком метода является краткосрочность условий невесомости и невозможность моделирования длительного космического полета. Данный способ воспроизводит условия кратковременной невесомости, но не позволяет моделировать пониженную весомость заданного уровня, что необходимо для моделирования лунной или марсианской гравитации. Строительство подобных сооружений требует значительных финансовых затрат.
Предложены модификации башен микрогравитации. В частности, для решения проблемы контроля отклонений падающей платформы от вертикали, снижения вибрации и стирания механических элементов конструкции, предложено устройство, которое обеспечивает вертикальную ориентацию падающей платформы за счет наличия постоянных магнитов, расположенных в башне вдоль направления движения платформы и котроллера, меняющего за счет магнитной петли активное управление направляющими на платформе (CN110901965A Guide control device and method for microgravity tower falling).
Предложено устройство, в котором микрогравитационная платформа поднимается наверх за счет подъемного устройства, и после расцепления с ним осуществляет свободное падение по направляющим. Затормаживание и остановка платформы происходит за счет тормозных пластин из магнита, входящих в ее конструкцию, которые взаимодействуют с постоянными магнитами, размещенными симметрично по высоте башне (CN212541666U Microgravity tower falling experimental equipment). Кроме того, предложено электромагнитное устройство, в котором перемещение кабины на верхнюю точку и торможение ее последующего свободного падения осуществляется за счет контролера, регулирующего напряженность и направленность электромагнитного поля (CN108725852A A kind of electromagnetism upthrow microgravity device, control method and system).
Недостатком данных методов является использование электромагнитных устройств с достаточно сильным электромагнитным излучением, способным, при длительном воздействии, оказывать существенное влияние на физиологические системы организма.
Другие наземные способы моделирования физиологических эффектов пониженной гравитации не оказывают изменений состояния вестибулярного анализатора, аналогичных таковым в космическом полете или во время пребывания на поверхности других планет, и не могут рассматриваться как аналоги. К числу таких можно отнести: способ моделирования физиологических эффектов микрогравитации методом «сухой» иммерсии, при котором испытуемый помещается в положении лежа до уровня подмышечных впадин в ванну с водой. При этом он отделен от воды тонкой водонепроницаемой пленкой, площадь которой превосходит в несколько раз площадь поверхности воды в ванне (Шульженко Е.Б., Виль-Вильямс И.Ф. Возможность проведения длительной водной иммерсии методом «сухого» погружения // Космич. биология и авиакосмич. медицина. 1976. Т. 10, №2. С. 82-84); способ моделирования физиологических эффектов микрогравитации путем помещения человека в теплом белье и гидроизолирующем костюме в воду (например, в костюме для космонавтов «Форель», предназначенном для сохранения плавучести при приводнении спускаемого аппарата) и его перевода в вертикальное положение с помощью поддува подголовника костюма объемом воздуха 11-12,5 л (Костюмная иммерсия, авторское свидетельство СССР №1436120, приоритет от 18.08.1986); способ моделирования физиологических эффектов микрогравитации, а именно гемодинамических, с помощью перевода человека в вертикальное положение и помещение его в пневмовакуумный костюм «Чибис», в котором создается положительное давление в диапазоне от +10 до +75 мм рт.ст., что обеспечивает регулируемый обжим мягких тканей живота, таза и нижних конечностей и дает возможность быстрого достижения эффектов микрогравитации и поддержания параметров гемодинамики, адекватных разным уровням пониженной гравитации (Лапаев Э.В., Крылов Ю.В., Кузнецов B.C. Физиология вестибулярного анализатора. Влияние невесомости и гиподинамии на функцию вестибулярного анализатора // Функция слухового и вестибулярного анализаторов при действии факторов авиакосмического полета / Проблемы косм. биол. - Т. 47. М.: Наука, 1983. Гл.2. С. 140-180); способ моделирования гемодинамических эффектов микрогравитации, включающий перевод испытуемого в антиортостатическое положение на период ночного отдыха, а на период активного бодрствования перед переводом в вертикальное положение используется регулируемый обжим мягких тканей живота, таза и/или нижних конечностей, который осуществляют в антиортостатическом положении с помощью эластичных материалов элементов одежды (например, противоперегрузочного костюма для космонавтов «Кентавр») с разной степенью растяжения-сжатия. Уровень обжима необходимо поддерживать в течение всего периода времени активного бодрствования в вертикальном положении тела (патент Российской Федерации №2474885, приоритет от 25.10.2011); способ моделирования пониженной гравитации с использованием системы подвесов испытуемого. Заданный уровень пониженной гравитации моделируется при помощи специального костюма, одетого на испытуемого и подсоединенного при помощи троса к подъемному устройству. Данный способ позволяет имитировать локомоции человека (ходьба, бег) на поверхностях планет (Луна, Марс) в процентном соотношении от веса тела испытуемого. При этом вес тела принимается на 100% и соответствует 1g, т.е. земным условиям. Таким образом, для моделирования пребывания человека весом 70 кг в условиях лунной силы тяжести необходимо создание силы вывешивания 16% от веса тела испытуемого, или 42 кг (K. Freyer, R. Ritzmann, A. Gollhofer . Improved postural control in response to a 4-week balance training in simulated martian gravity - a countermeasure for long-term space flights / 19th Humans in Space Symposium, 2013. P. 44); способ длительного моделирования влияния невесомости на человеческий организм в наземных условиях с помощью постельного режима в антиортостатическом положении (антиортостатическая гипокинезия - АНОГ) с малым отрицательным углом наклона тела испытуемого относительно горизонтальной оси -5ч 10° (Коваленко Е.А. Основные методы моделирования биологических эффектов невесомости // Космическая биол., 1977. Т.11, №4. С. 3-9; Лобачик В.И., Жидков В.В., Абросимов С.В. Состояние жидкостных фаз тела в динамике 120-суточной антиортостатической гипокинезии // Космич. биология и авиакосмич. медицина. 1989. Т. 23, №5. С. 57-61).
Недостатками всех перечисленных способов является моделирование ограниченного круга физиологических нарушений, вызываемых пребыванием в условиях невесомости. В частности, в них не воспроизводятся условия воздействия моделируемой гипогравитации на функцию вестибулярного анализатора, нарушение работы которого лежит в основе тошноты, «космической анорексии» и сопутствующих нарушений вегетативных функций.
Технический результат предлагаемого изобретения выражается:
- в возможности моделирования эффектов пониженной гравитации заданного уровня в течение длительного времени;
- в отсутствии механического воздействия на исследуемых;
- в возможности текущего контроля эффектов влияния пониженной гравитации на состояние физиологических систем организма.
Сущность способа моделирования сниженного уровня гравитации состоит в разработке нового безопасного способа моделирования в наземных условиях пребывания человека или животных в невесомости или на планетах с пониженной гравитацией и оценки эффектов влияния пониженной гравитации на состояние нейровестибулярного аппарата, а также характеристики поведенческих и физиологических изменений в условиях пониженной гравитационной нагрузки.
Поставленная задача достигается тем, что платформа с исследуемым объектом осуществляет вертикальный спуск с заданной высоты с контролируемым ускорением, задаваемым оператором, причем на последнем отрезке вертикальной траектории осуществляется плавное торможение платформы до ее полной остановки, а подъем на верхнюю точку осуществляется с постоянной скоростью. Ускорение, задаваемым оператором, может быть равным ускорению свободного падения на Землю (гипогравитация), Луну или Марс (пониженная весомость) или любое другое.
Отличительным признаком предлагаемого способа является возможность моделировать в наземных условиях физиологические сдвиги в организме испытуемых в условиях пониженной гравитационной нагрузки, уровень которой выбирает оператор. Другим важным отличительным признаком способа является создание условий для испытуемых, которые вызывают специфическую активацию нейровестибулярного аппарата характерную для пониженной гравитации и играющую ключевую патофизиологическую роль в развитии «космической болезни», которая не воспроизводятся другими наземными моделями. Метод не травматичен, более того, на испытуемых не оказывается механических воздействий, ограничивающих свободное перемещение. Устройство, при помощи которого осуществляется способ, может быть запрограммирован на длительную работу, создавая возможность исследования физиологических эффектов пониженной гравитации в модели длительного космического полета.
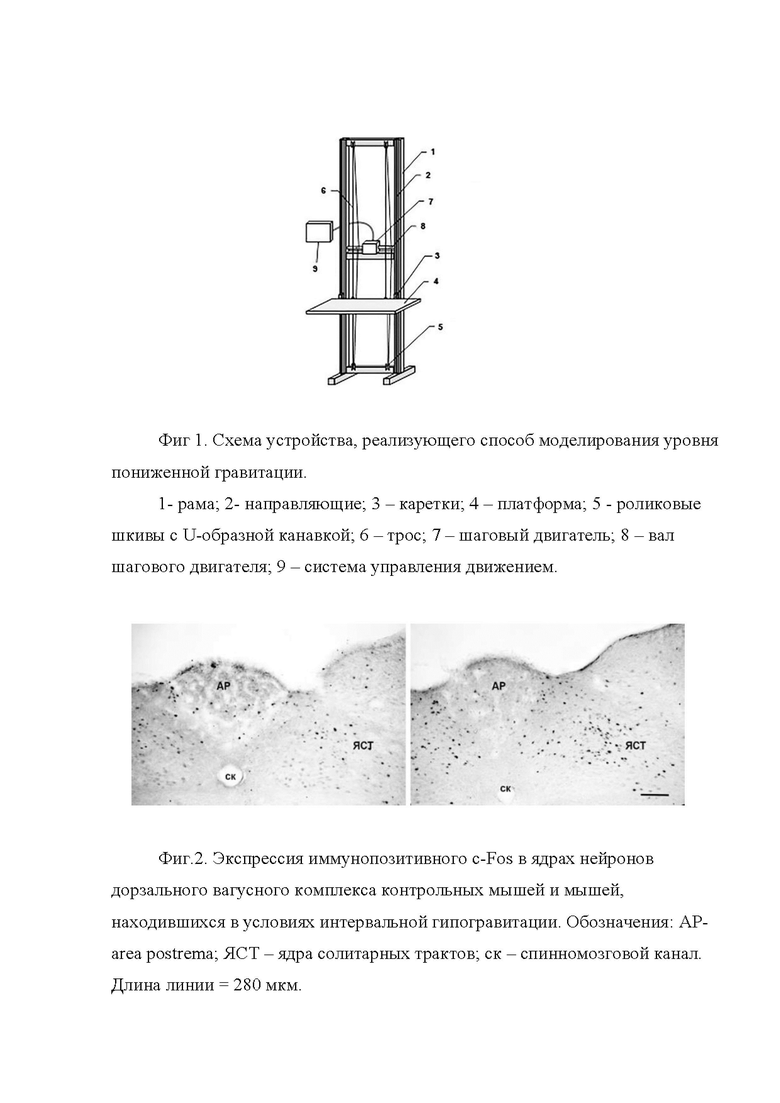
Моделирование физиологических эффектов, соответствующих разным уровням пониженной гравитации, осуществляют за счет устройства, принцип работы которого заключается в циклической смене фаз подъема платформы с исследуемым организмом (животным или человеком) на определенную высоту без ускорения, затем опускания вниз с ускорением, задаваемым оператором и равным ускорению свободного падения на Землю (гипогравитация), Луну или Марс (пониженная весомость) или любым другим, задаваемым оператором, при помощи специального устройства. Устройство для осуществления способа (в случае использования животных в качестве испытуемых объектов) (фиг. 1) представляет собой вертикальную металлическую раму (поз. 1) с двумя прикрепленными профильными рельсовыми направляющими (поз. 2), по которым при помощи двух кареток (модулей линейного перемещения) (поз. 3) перемещается платформа (поз. 4) с установленной клеткой с животными. Платформа приводится в движение за счет работы шагового двигателя (поз. 7), с валом которого (поз. 8) она соединена посредством двух пар тонких тросов (поз. 6). Шаговый двигатель фиксирован на поперечной балке несущей рамы, к его валу прикреплены 4 троса, два из которых направлены вверх, два других вниз. Обе пары тросов, перекинутые вверху и внизу рамы через роликовые шкивы с U-образной канавкой (поз. 5), с натяжением прикреплены к платформе. Таким образом, вращение вала приводит к одновременному натяжению тросов, тянущих в одну сторону, и ослаблению тросов, ориентированных к движению в другую, что приводит к движению платформы с установленной клеткой вверх или вниз. Управляет движением система управления (поз. 9), состоящая из датчиков положения, контроллера установки с вшитой программой управления движением, и драйверов шагового двигателя. Программа обеспечивает циклический подъем и спуск платформы, причем подъем осуществляется с постоянной скоростью (в нашем случае 0,5 м/c), а спуск с ускорением равным либо ускорению свободного падения на Землю (гипогравитация, 9,8 м/сI), либо ускорению в условиях пониженной весомости (лунной - 1,63 м/сI, марсианской - 3,71 м/сI). Требуемое ускорение развивается на верхних 2/3 пути вниз, затем наступает фаза равномерного снижения скорости до нуля в нижней точке, и после короткой паузы (0,5 с) снова начинается подъем. Группа контрольных животных находится в тех же условиях, что и экспериментальные животные, за исключением того, что как подъем, так и спуск осуществляются с постоянной скоростью 0,5 м/с.
Именно за счет таких особенностей выполнения конструктивных элементов и раскрытых в описании взаимосвязей между ними реализуется устройство, принцип работы которого заключается в циклической смене фаз подъема платформы с исследуемым организмом на высоту без ускорения, затем опускания вниз с ускорением, задаваемым оператором и равным ускорению свободного падения на Землю, Луну или Марс или любым другим, задаваемым оператором ускорением, и за счет такого выполнения устройства, обеспечивается моделирование физиологических эффектов, соответствующих заданным уровням пониженной гравитации.
Для достижения сформулированного технического результата заявленный способ моделирования пониженной гравитации осуществляется именно с помощью заявленного устройства, которое характеризуется заданным конструктивным выполнением, наличием и функциональным назначением его частей, и их взаимным расположением.
Пример осуществления способа. Проводили эксперимент на 16 мышах самцах линии BALB/C, весом 24,3±0,14 г с целью исследования влияния гипогравитации в течение 4 недель на пищевое поведение и активность структур продолговатого мозга, вовлеченных в аноректические реакции организма. Эксперимент проводили в помещении с 12 часовым световым периодом. После предварительного взвешивания, животных делили на две группы (контрольную и экспериментальную, в каждой по 8 мышей) и помещали в индивидуальные отсеки клетки, которая фиксировалась на подвижной платформе установки, обеспечивающий подъем и спуск с заданным ускорением. Животные имели свободный доступ к воде и гранулированному корму и могли свободно перемещаться по отсеку. Экспериментальные животные испытывали подъем на высоту 2 метра с постоянной скоростью 0,5 м/с и последующий спуск с ускорением 9,8 м/сI. На расстоянии 50 см от нижней точки платформа начинала плавное торможение и останавливалась в нижнем положении. После короткой паузы (0,5 с) начинался следующий цикл подъем/спуск. Группа контрольных животных находилась в тех же условиях, что и экспериментальные животные, за исключением того, что как подъем, так и спуск осуществлялись с постоянной скоростью 0,5 м/с.
Через 14 суток эксперимента, животных контрольной и экспериментальной групп взвешивали, после чего проводили транскардиальную перфузию 4%-ным забуференным парафармальдегидом. Выделенный головной мозг замораживали на сухом льду и получали криостаты срезы продолговатого мозга толщиной 14 мкм. Полученные срезы монтировали на гистологические срезы и выявляли в нейронах дорсального вагусного комплекса экспрессию гена c-Fos (маркер клеточной активации) при помощи иммуногистохимического метода. Подсчет количества активированных (c-Fos иммунопозитивных) нейронов осуществляли при помощи светового микроскопа Nikon Eclipse200E, соединенного с цифровым фотоаппаратом, и морфометрической программы ImagePro Plus 8.0.
Результаты взвешивания животных до и после эксперимента продемонстрировали достоверное снижение веса тела у мышей, находящихся в условиях периодической гипогравитации, по сравнению с мышами контрольной группы. Падение веса относительно контроля составило 18.8±4.1% (Р<0.05). Исследование срезов продолговатого мозга продемонстрировало усиление экспрессии c-Fos в дорзальном вагусном комплексе (фиг. 2).
Подсчет активированных нейронов в дорсальном вагусном комплексе экспериментальных животных продемонстрировал достоверное увеличение таковых в комиссуральном отделе ядер солитарного тракта (на 104.6±34.1%; Р<0.01), медиальном отделе ядер солитарного тракта (на 94.6±38.0%; Р<0.01) и area postrema (на 44.6±21.2%; Р<0.05) относительно контрольных мышей (рис. 3).
Ранее полученные данные свидетельствуют о том, что описанные области мозга вовлекаются в аноректические реакции организма в ответ на действие различных факторов (Chaptini L., Peikin S. Neuroendocrine regulation of food intake // Curr Opin Gastroenterol. 2008. Vol. 24, №2. P. 223-229; Sбnchez-Lasheras C., Kцnner A.C., Brьning J.C. Integrative neurobiology of energy homeostasis-neurocircuits, signals and mediators // Front Neuroendocrinol. 2010. Vol. 31, №1. P. 4-15; Schwartz G.J. The role of gastrointestinal vagal afferents in the control of food intake: current prospects // Nutrition. 2000. Vol. 16. P. 866-873). Полученные результаты позволяют сделать вывод о том, что наблюдаемое редуцирование пищевого потребления является следствием нахождения в условиях периодической гипогравитации и свидетельствует об адекватности экспериментальной модели.
Таким образом, в предлагаемом способе моделирования пониженной гравитации и устройстве для его осуществления предложена новая совокупность существенных признаков. Все предложенные признаки существенны, поскольку влияют на достигаемый технический результат, так как находятся в причинно-следственной связи с указанным результатом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ФИЗИОЛОГИЧЕСКИХ ЭФФЕКТОВ ПРЕБЫВАНИЯ НА ПОВЕРХНОСТИ ПЛАНЕТ С ПОНИЖЕННЫМ УРОВНЕМ ГРАВИТАЦИИ | 2013 |
|
RU2529813C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ГЕМОДИНАМИЧЕСКИХ ЭФФЕКТОВ МИКРОГРАВИТАЦИИ | 2011 |
|
RU2474885C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДЕЙСТВИЯ НЕВЕСОМОСТИ НА ДВИГАТЕЛЬНУЮ АКТИВНОСТЬ НАХОДЯЩЕГОСЯ НА БОРТУ КОСМИЧЕСКОГО АППАРАТА ОПЕРАТОРА | 2021 |
|
RU2777477C1 |
| Способ моделирования гравитационных условий космического полета | 1977 |
|
SU649613A1 |
| СПОСОБ МОНИТОРИНГА ВОЗДЕЙСТВИЯ НЕВЕСОМОСТИ НА ДВИГАТЕЛЬНУЮ АКТИВНОСТЬ НАХОДЯЩЕГОСЯ НА БОРТУ КОСМИЧЕСКОГО АППАРАТА ОПЕРАТОРА | 2021 |
|
RU2777476C1 |
| Система обезвешивания сегментов тела человека для моделирования эффектов микрогравитации и способ её использования | 2024 |
|
RU2839349C1 |
| Устройство для моделирования гидродинамических процессов в топливном баке космического аппарата | 2018 |
|
RU2703745C1 |
| СПОСОБ ПРОВЕДЕНИЯ НАЗЕМНОГО ЭКСПЕРИМЕНТА, МОДЕЛИРУЮЩЕГО ПИЛОТИРУЕМЫЙ ПОЛЕТ К МАРСУ | 2007 |
|
RU2348572C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОЖАРНОЙ БЕЗОПАСНОСТИ ГЕРМЕТИЧНЫХ ОТСЕКОВ ЖИЛЫХ МОДУЛЕЙ КОСМИЧЕСКИХ БАЗ НА ЛУНЕ | 2006 |
|
RU2319528C2 |
| Космическая лифтовая система Луна - Земля | 2016 |
|
RU2665107C2 |

Группа изобретений относится к медицине, а именно к способу и устройству для моделирования пониженной гравитации заданного уровня. Устройство представляет собой вертикальную металлическую раму с платформой. Платформа выполнена с возможностью перемещаться под контролем системы управления. Система управления содержит датчики положения, контроллер установки с установленной программой управления движением, шаговый двигатель и драйвера шагового двигателя. Драйвера обеспечивают циклические подъем и спуск платформы. К вертикальной металлической раме прикреплены две профильные рельсовые направляющие. Платформа выполнена с возможностью перемещения по профильным рельсовым направляющим при помощи двух модулей линейного перемещения за счет шагового двигателя. Платформа соединена с валом шагового двигателя посредством двух пар тросов. Шаговый двигатель фиксирован на поперечной балке несущей рамы, к его валу прикреплены 4 троса. Два троса направлены вверх два других вниз. Обе пары тросов, перекинутые вверху и внизу рамы через роликовые шкивы с U-образной канавкой, с натяжением прикреплены к платформе таким образом, что вращение вала приводит к одновременному натяжению тросов, тянущих в одну сторону, и ослаблению тросов, ориентированных к движению в другую, для приведения к движению платформы вверх или вниз. Подъем платформы осуществляется на высоту с постоянной скоростью. Спуск платформы осуществляется с запрограммированным ускорением. Ускорение развивается на верхних 2/3 пути вниз, затем наступает фаза равномерного снижения скорости до нуля в нижней точке. Моделирование гравитации достигается посредством вертикального спуска с заданной высоты платформы с контролируемым ускорением, задаваемым оператором. На последнем отрезке вертикальной траектории осуществляется плавное торможение платформы до ее полной остановки. Обеспечивается моделирование эффектов пониженной гравитации заданного уровня в течение длительного времени при отсутствии механического воздействия на исследуемых с возможностью текущего контроля эффектов влияния пониженной гравитации на состояние физиологических систем организма. 2 н.п. ф-лы, 3 ил.
1. Способ моделирования пониженной гравитации заданного уровня с помощью устройства по п. 2, достигаемый посредством вертикального спуска с заданной высоты платформы с контролируемым ускорением, задаваемым оператором, причем на последнем отрезке вертикальной траектории осуществляется плавное торможение платформы до ее полной остановки, а подъем на верхнюю точку осуществляется с постоянной скоростью.
2. Устройство для моделирования пониженной гравитации, представляющее собой вертикальную металлическую раму с платформой, выполненной с возможностью перемещаться под контролем системы управления из датчиков положения, контроллера установки с установленной программой управления движением, шагового двигателя и драйверов шагового двигателя, обеспечивающих циклические подъем и спуск платформы, при этом к вертикальной металлической раме прикреплены две профильные рельсовые направляющие, платформа выполнена с возможностью перемещения по профильным рельсовым направляющим при помощи двух модулей линейного перемещения за счет шагового двигателя, с валом которого платформа соединена посредством двух пар тросов, при этом шаговый двигатель фиксирован на поперечной балке несущей рамы, к его валу прикреплены 4 троса, два из которых направлены вверх, два других вниз, обе пары тросов, перекинутые вверху и внизу рамы через роликовые шкивы с U-образной канавкой, с натяжением прикреплены к платформе таким образом, что вращение вала приводит к одновременному натяжению тросов, тянущих в одну сторону, и ослаблению тросов, ориентированных к движению в другую, для приведения к движению платформы вверх или вниз, причем подъем платформы осуществляется на высоту с постоянной скоростью, а спуск с запрограммированным ускорением, при этом ускорение развивается на верхних 2/3 пути вниз, затем наступает фаза равномерного снижения скорости до нуля в нижней точке.
| СПОСОБ МОДЕЛИРОВАНИЯ ГЕМОДИНАМИЧЕСКИХ ЭФФЕКТОВ МИКРОГРАВИТАЦИИ | 2011 |
|
RU2474885C1 |
| CN 212541666 U, 12.02.2021 | |||
| CN 108725852 A, 02.11.2018 | |||
| CN 113406714 A, 17.09.2021 | |||
| CN 110901965 A, 24.03.2020 | |||
| US 2022332445 A1, 20.10.2022 | |||
| US 20050230557 A1, 20.10.2005 | |||
| WO 2019135786 A1, 11.07.2019. | |||
