Изобретение относится к области физиологии человека, предназначено для моделирования лунной и марсианской гравитации, а также эффектов абсолютной невесомости, для изучения физиологических эффектов организма и биомеханических характеристик тела человека.
В настоящее время существуют различные модели полного или частичного обезвешивания тела человека или отдельных его сегментов. Эти модели используют как в практических целях - уменьшение нагрузки на отдельные сегменты тела в процессе реабилитации опорно-двигательного аппарата, так и в научных - изучаются различные физиологические эффекты пребывания тела человека в условиях микрогравитации. Все известные устройства условно можно разделить на две группы: вертикальное и горизонтальное позиционирование тела в пространстве. К первой группе можно отнести вертикальное обезвешивание (BWS) при помощи специальной обвязки и противовесов, а также с использованием камеры повышенного давления для нижних конечностей. Такие устройства моделируют лишь биомеханические параметры эффектов микрогравитации (снижение реакции опоры, облегчение локомоций и т.д.). В тоже время при таком положении тела не оказывается никого влияния на гемодинамику, обеспечиваемую работой сердечно-сосудистой системы - она остается прежней, как и в условиях земной гравитации.
Для моделирования всего спектра эффектов воздействия пониженной гравитации (как физиологических, так и биомеханических) используют различные модели с горизонтальным расположением тела человека. Такие устройства отличаются друг от друга возможностью работы в различных степенях свободы: чем больше степеней свободы, тем ближе моделируемые эффекты реальным параметрам функционирования организма человека в условиях микрогравитации.
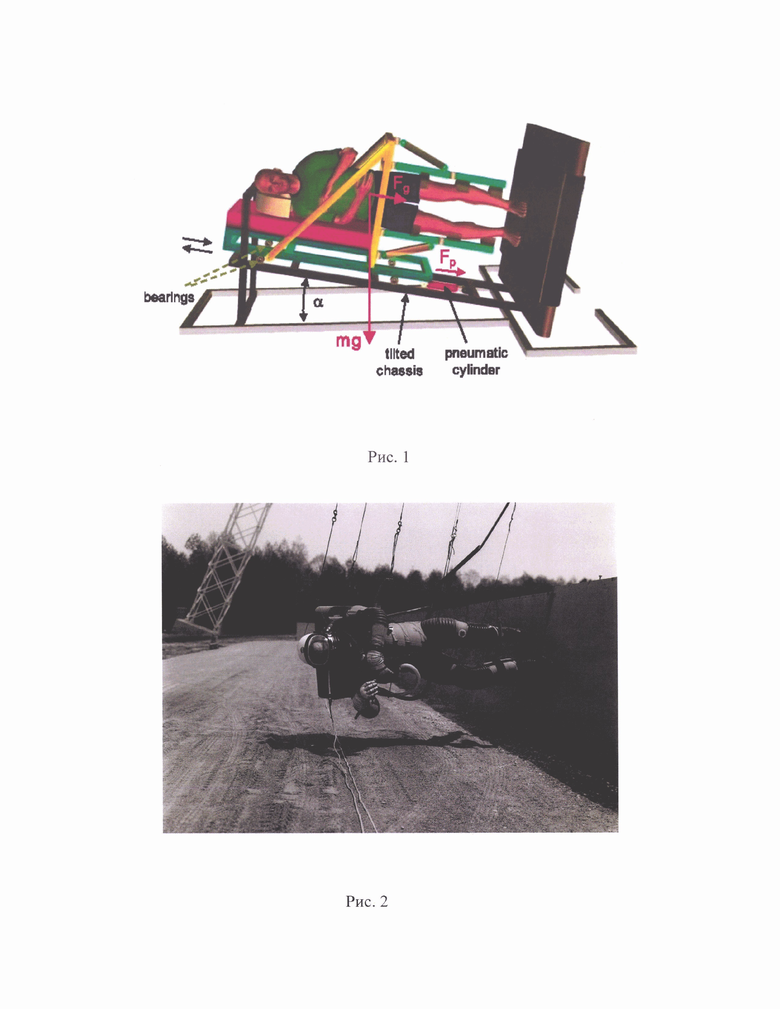
Известна наклонная система поддержания тела (Tilted body weight support system) [1] (Рис. 1). Система представляет собой набор рычагов, ограничивающих перемещение отдельных сегментов тела с возможностью выполнения беговых и шагательных движений в положении лежа на боку.
Известен симулятор лунной походки [2] (Рис. 2). Тело человека в специальном скафандре, посредством длинных тросов, прикрепляется к стреле специального подъемного крана в положении лежа на боку.
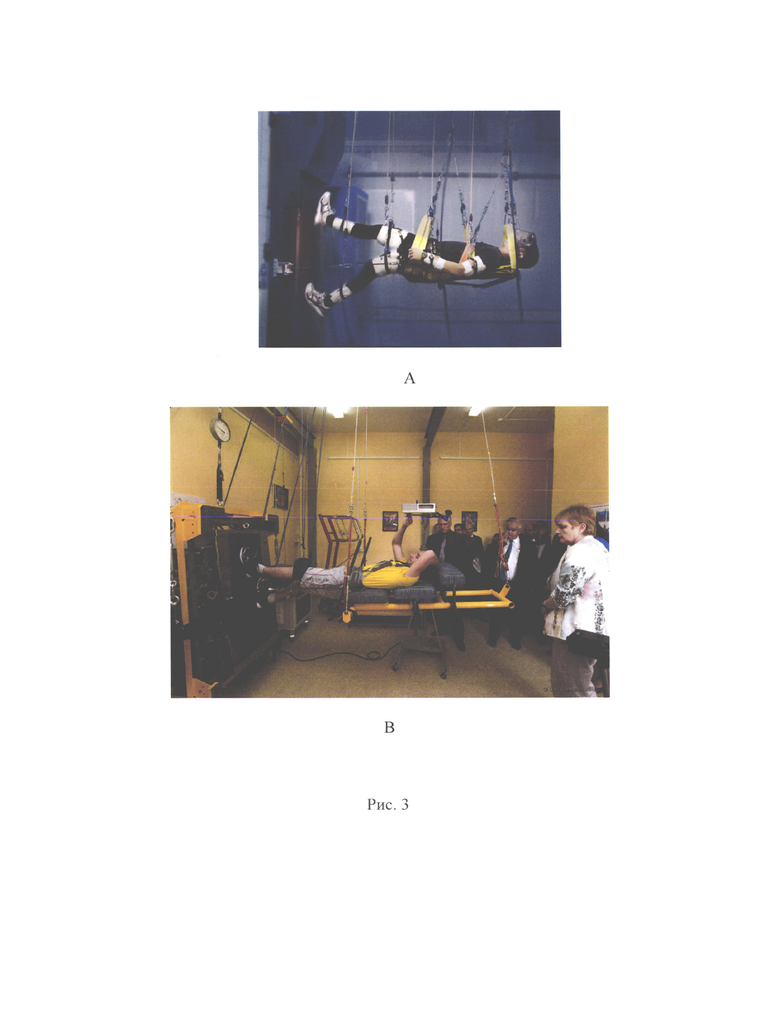
Известна горизонтальная система вывешивания тела (Supine suspension system) [3] (Рис. 3 - А и В). Тело человека во фронтальном положении, при помощи специальной обвязки, подвешивается на жестких нерастяжимых тросах к раме. Конечности при этом закреплены растяжимыми жгутами, что позволяет совершать движения и локомоций.
Все перечисленные подходы имеют один существенный недостаток -минимизация ограничение степеней свободы. Позиционирование тела человека на всех этих устройствах осуществляется либо посредством жестких рычагов [1], либо нерастяжимых, жестко фиксированных тросов [2, 3]. Предлагаемая нами система позволяет заметно расширить число степеней свободы, приближая биомеханические параметры движения к реальным условиям.
Техническим результатом изобретения является увеличение степеней свободы движения сегментов тела человека при моделировании микрогравитации, что позволяет совершать перемещение тела и его отдельных его сегментов в шести степенях свободы. Три поступательных движения вдоль основных осей (X, Y, Z) и три вращательных вокруг тех же осей.
Другие похожие системы этого не позволяют и имеют ограниченное количество этих степеней свободы.
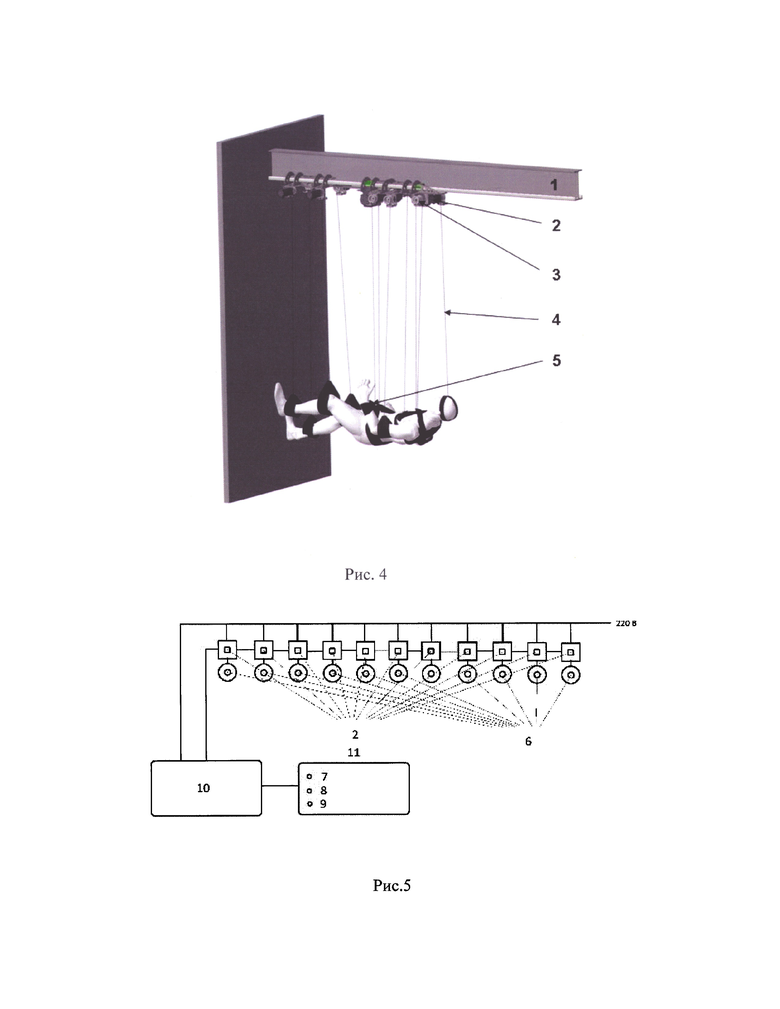
Этот технический результат достигается путем создания системы обезвешивания, состоящей из набора закрепленных на горизонтальной раме серводвигателей с датчиками силы, валы двигателей оснащены шкивами, на которые наматываются тросы, причем свободные концы тросов, посредством манжет, прикрепленных к сегментам тела человека, отличающейся тем, манжеты одновременно прикреплены к следующим 11 сегментам тела человека: голень левой ноги - 1, голень правой ноги - 1, бедро левой ноги - 1, бедро правой ноги -1, пояс в районе таза - 1, грудь в области грудной клетки -1, предплечие правой руки - 1, предплечие левой руки - 1, плечо правой руки - 1, плечо левой руки - 1, голова - 1.
Система предназначена для моделирования эффектов микрогравитации.
Система работает следующим образом (Рис. 5). Сначала производят подготовительный этап - взвешивание. На этапе взвешивания все 11 сегментов тела, закрепленные манжетами к тросам 11 серводвигателей, путем принудительного перемещения, используя интерфейс блока управления (11) при помощи кнопки (7) и контроллера (10), отдающего команду на вращение моторов серводвигателей, приводятся в горизонтальное положение на одном уровне над землей - 120 см от уровня пола. Испытуемому дается вербальная команда полного расслабления (для корректного взвешивания массы сегментов). После это контроллеру (10) дается команда для взвешивания сегментов. Для этого на пульте блока управления (11) оператор нажимает кнопку (8). Электрический сигнал от этой кнопки идет в контроллер (10). Контроллер считывает значения от датчиков силы (5) сервоприводов (6) (11 шт по количеству сегментов), преобразуя в массу, которая измеряется в килограммах. Используя эти значения контроллер (10) устанавливает индивидуальное значение нагрузки для каждого из сегментов. Нагрузка равна массе сегмента и имеет вектор приложения противоположный вектору гравитационного поля земли.
Далее система переводится в режим обезвешивания. Для этого оператор нажимает кнопку (9) на пульте блока управления (11). Сигнал от этой кнопки идет в контроллер (10). В контроллере расчетная масса каждого сегмента преобразуется в электрический ток повышенной мощности. Этот ток идет к сервоприводам (6). Каждый сервопривод используя этот ток создает нагрузку равную массе соответствующего сегмента тела. Нагрузка равна массе сегмента и имеет вектор приложения противоположный вектору гравитационного поля земли, что и обеспечивает режим обезвешивания. В вывешенном состоянии имеется возможность свободно двигать руками и ногами, перемещаться вперед/назад, вверх/вниз.
Данная система может быть интегрирована с беговой дорожкой для выполнения беговой тренировки. Сила, с которой человек прижимается к тредбану, регулируется специальной системой притяга, что позволяет задавать различные величины реакции опоры от 0 до 2G.
Путем смещения блока сервоприводом от вертикали можно добиваться различных уровней реакции опоры без системы притяга, что открывает возможность использовать предложенную систему как средство моделирования лунной и марсианской гравитации с наличием всех степеней свободы.
Наличие энкодеров (Блок-схема), являющихся составной частью серводвигателей, обеспечивающих вывешивание, открывает широкие возможности для прямого биомеханического анализа движений, поскольку перемещение каждого из сегментов вызывает определенное вращение энкодера по прямой кинематической связи. Полученная информация позволяет визуализировать смещение отдельных сегментов, строить палочковые модели человека в динамике, а так же может быть подвергнута дальнейшей математической обработке.
Краткое описание рисунков:
Рис. 1 - наклонная система поддержания тела. Система представляет собой набор рычагов, ограничивающих перемещение отдельных сегментов тела с возможностью выполнения беговых и шагательных движений в положении лежа на боку.
Рис. 2 - симулятор лунной походки.
Рис. 3 - горизонтальная система вывешивания тела.
Рис. 4 - система обезвешивания,
где 1 - горизонтальная рама, 2 - серводвигатели, 3 - шкивы, 4 - тросы, 5 - манжеты.
Рис. 5 - блок-схема работы системы, где 1 - кнопка режима перемещения, 2 - блок управления, 3 - контроллер, 4 - кнопка режима взвешивания, 5 - датчики силы, 6 - серводвигатели, 7 - кнопка режима обезвешивания.
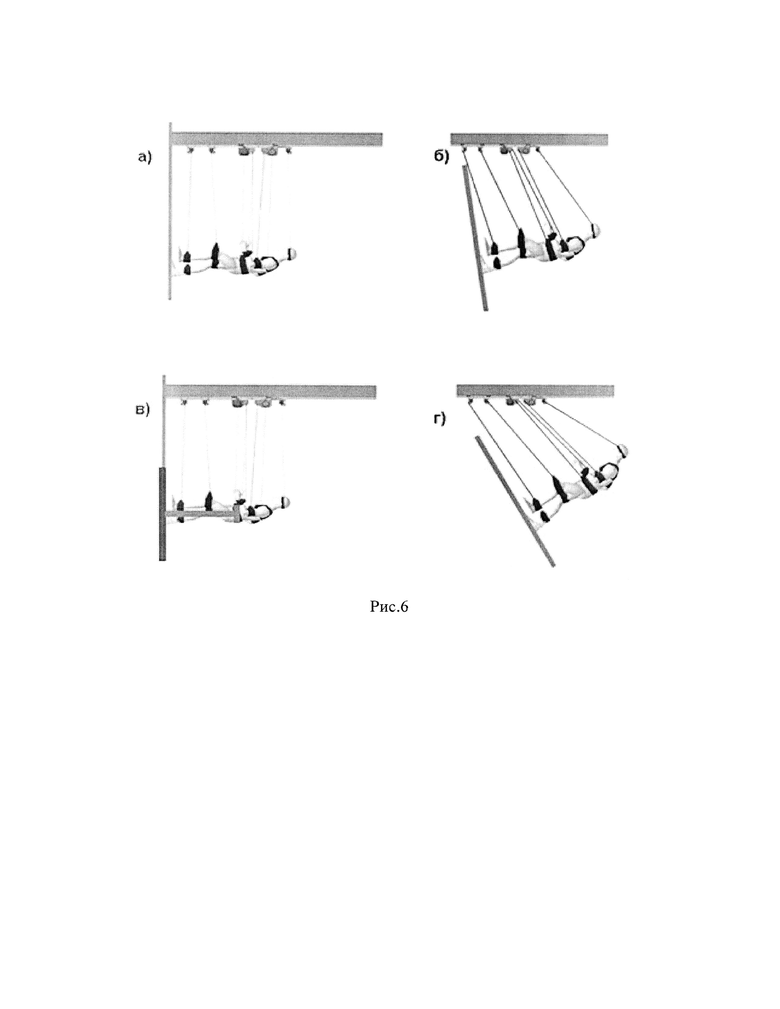
Рис. 6 - Варианты работы системы:
а) моделирование полной невесомости;
б) моделирование лунной гравитации, при этом угол между горизонтом и осью тела человека составляет 9,6°, что соответствует 1/6 от земной гравитации;
в) отработка беговых тренировок в земных условиях с использованием притяга;
г) моделирование марсианской гравитации, при этом угол между горизонтом и осью тела человека составляет 22,4°, что соответствует 1/3 от земной гравитации.
Литература
1. F. Sylos-Labini, Y. Ivanenko, G. Cappellini, A. Portone, M. Maclellan, F. Lacquaniti. Changes of gait kinematics in different simulators of reduced gravity // J. Mot. Behav. - №45. - 2013. - P. 495-505.
2. V.A. Bogdanov, V.S. Gurfinkel, and V.E. Panfilov, "Human motor under lunar gravity conditions (Human performance in various locomotive tasks simulated lunar reduced gravity conditions, classifying test stands and equipment)," Kosmicheskaya Biologiya I Meditsina, vol. 5, pp. 3-13, 1971.
3. J. De Witt, G. Perusek, J. Bentley, W. Edwards, K. Gilkey, B. Lewandowski, et al. Kinematic and Electromyographic Evaluation of Locomotion on the Enhanced Zero-gravity Locomotion Simulator: A Comparison of External Loading Mechanisms. // US National Aeronautics and Space Administration. - 2008. - P. 1-27.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ГЕМОДИНАМИЧЕСКИХ ЭФФЕКТОВ МИКРОГРАВИТАЦИИ | 2011 |
|
RU2474885C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ПО ФОРМИРОВАНИЮ ОСАНКИ | 2000 |
|
RU2189267C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНЫХ НАВЫКОВ ХОДЬБЫ У ДЕТЕЙ С ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ (ДЦП) И С ЗАБОЛЕВАНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2698987C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АКТИВНОСТИ ТКАНЕЙ | 1993 |
|
RU2135073C1 |
| СПОСОБ ТРЕНИРОВКИ ВЫПОЛНЕНИЯ РАЦИОНАЛЬНОЙ ПОЗЫ СИДЯ В СТАТИКО-ДИНАМИЧЕСКОМ РЕЖИМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152237C1 |
| УПРАВЛЯЕМЫЙ ПРОТЕЗ КИСТИ РУКИ | 2020 |
|
RU2754125C1 |
| СПОСОБ ЛЕЧЕНИЯ БОЛЕВЫХ СИНДРОМОВ ПРИ РАСПРОСТРАНЕННОМ ДЕФОРМИРУЮЩЕМ ОСТЕОХОНДРОЗЕ ПОЗВОНОЧНИКА НА МНОГОФУНКЦИОНАЛЬНОМ ТРЕНАЖЕРЕ БУБНОВСКОГО (МТБ) | 2013 |
|
RU2542081C2 |
| Способ лечения дегенеративно-дистрофических процессов позвоночника | 2022 |
|
RU2804198C1 |
| СПОСОБ АКТИВАЦИИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА | 2012 |
|
RU2505277C1 |
| СПОСОБ ЛЕЧЕНИЯ БОЛЬНЫХ С СИНДРОМОМ ХРОНИЧЕСКОЙ УСТАЛОСТИ | 2011 |
|
RU2458666C1 |
Группа изобретений относится к медицинской технике, а именно к системе обезвешивания сегментов тела человека для моделирования эффектов микрогравитации и способу ее использования. Система состоит из набора закрепленных на горизонтальной раме серводвигателей, выполненных с возможностью создания нагрузки с датчиками силы, тросов, манжет, блока управления, контроллера, выполненного с возможностью считывания значений от датчиков силы сервоприводов, преобразования значений в массу и установки индивидуального значения нагрузки для каждого сегмента тела человека, кнопок режима перемещения, режима взвешивания, режима обезвешивания на пульте блока управления. Валы серводвигателей оснащены шкивами, выполненными с возможностью наматывать тросы, а свободные концы тросов посредством манжет выполнены с возможностью прикрепления к 11 сегментам тела человека. Манжеты выполнены с возможностью одновременного прикрепления к 11 сегментам тела человека с возможностью перемещения 11 сегментов тела человека в шести степенях свободы. 11 сегментами тела человека являются голень левой ноги, голень правой ноги, бедро левой ноги, бедро правой ноги, пояс в районе таза, грудь в области грудной клетки, предплечие правой руки, предплечие левой руки, плечо правой руки, плечо левой руки, голова, а нагрузка равна массе сегмента тела человека и имеет вектор приложения, противоположный вектору гравитационного поля земли. В способе с помощью кнопки режима перемещения 11 сегментов тела человека приводят в горизонтальное положение на одном уровне с землей. Затем дают вербальную команду расслабления испытуемому. Далее нажимают кнопку режима взвешивания, сигнал от кнопки режима взвешивания идет в контроллер, контроллер считывает значения от датчиков силы сервопроводов, затем контроллер устанавливает индивидуальное значение нагрузки для каждого из сегментов тела человека. Далее нажимают кнопку режима обезвешивания, в контроллере расчетная масса каждого сегмента тела человека преобразуется в электрический ток, идущий к сервоприводам для создания нагрузки, равной массе сегмента тела человека. Нагрузка равна массе сегмента тела человека и имеет вектор приложения, противоположный вектору гравитационного поля земли. Техническим результатом изобретения является увеличение степеней свободы движения сегментов тела человека при моделировании микрогравитации, что позволяет совершать перемещение тела и его отдельных сегментов в шести степенях свободы. Три поступательных движения вдоль основных осей (X, Y, Z) и три вращательных вокруг тех же осей. 2 н.п. ф-лы, 6 ил.
1. Система обезвешивания сегментов тела человека для моделирования эффектов микрогравитации, состоящая из набора закрепленных на горизонтальной раме серводвигателей, выполненных с возможностью создания нагрузки с датчиками силы, тросов, манжет, блока управления, контроллера, выполненного с возможностью считывания значений от датчиков силы сервоприводов, преобразования значений в массу и установки индивидуального значения нагрузки для каждого сегмента тела человека, кнопок режима перемещения, режима взвешивания, режима обезвешивания на пульте блока управления, при этом валы серводвигателей оснащены шкивами, выполненными с возможностью наматывать тросы, а свободные концы тросов посредством манжет выполнены с возможностью прикрепления к 11 сегментам тела человека; манжеты выполнены с возможностью одновременного прикрепления к 11 сегментам тела человека с возможностью перемещения 11 сегментов тела человека в шести степенях свободы; при этом 11 сегментами тела человека являются голень левой ноги, голень правой ноги, бедро левой ноги, бедро правой ноги, пояс в районе таза, грудь в области грудной клетки, предплечие правой руки, предплечие левой руки, плечо правой руки, плечо левой руки, голова, а нагрузка равна массе сегмента тела человека и имеет вектор приложения, противоположный вектору гравитационного поля земли.
2. Способ обезвешивания сегментов тела человека для моделирования эффектов микрогравитации с использованием системы по п. 1, состоящей из набора закрепленных на горизонтальной раме серводвигателей, выполненных с возможностью создания нагрузки с датчиками силы, блока управления, контроллера, кнопок на пульте блока управления, шкивов, тросов, манжет, выполненных с возможностью прикрепления к 11 сегментам тела человека с возможностью перемещения 11 сегментов тела человека в шести степенях свободы; при этом 11 сегментами тела человека являются голень левой ноги, голень правой ноги, бедро левой ноги, бедро правой ноги, пояс в районе таза, грудь в области грудной клетки, предплечие правой руки, предплечие левой руки, плечо правой руки, плечо левой руки, голова, в котором с помощью кнопки режима перемещения 11 сегментов тела человека приводят в горизонтальное положение на одном уровне с землей, затем дают вербальную команду расслабления испытуемому, далее нажимают кнопку режима взвешивания, сигнал от кнопки режима взвешивания идет в контроллер, контроллер считывает значения от датчиков силы сервопроводов, затем контроллер устанавливает индивидуальное значение нагрузки для каждого из сегментов тела человека, далее нажимают кнопку режима обезвешивания, в контроллере расчетная масса каждого сегмента тела человека преобразуется в электрический ток, идущий к сервоприводам для создания нагрузки, равной массе сегмента тела человека, при этом нагрузка равна массе сегмента тела человека и имеет вектор приложения, противоположный вектору гравитационного поля земли.
| De Witt J | |||
| K | |||
| et al | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Hanover, MD: NASA Center for AeroSpace Information | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| - С | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Partial Gravity Simulators, Harness | |||

