Предлагаемый привод относится к области станкостроения и может быть использован в силовых головках и металлорежущих станках.
Известен привод шпинделя (А.с. 602311), состоящий из электродвигателя и промежуточной передачи, у которого тангенциальные колебания скорости инструмента относительно головки достигается за счет применения соединенного с электродвигателем кривошипно-шатунного механизма с регулируемой длиной кривошипа и зубчатой передачи, например, косозубой, одна шестерня которой соединена со шпинделем, а другая жестко установлена на ползуне кривошипно-шатунного механизма, выполненном в виде вала и связана через упомянутую передачу с электродвигателем.
Скорость шпинделя может быть представлена в виде:
ω=ωср+ωδ, где:

здесь: Z10, Z11, Z12, Z13 - числа зубьев соответствующих косозубых колес (Фиг. 1);
ωэл.дв - скорость вращения вала электродвигателя.
Величину мгновенного углового перемещения шестерни 11, являющегося следствием осевого смещения шестерни 10 можно определить зная угол наклона β зубьев пары 10-11.
х = [(е+b) - е cosα - b cosγ]tgβ, здесь:
е и b - соответственно, длины кривошипа и шатуна;
α и γ - их углы наклона к оси абсцисс.
Дифференцируя это выражение по времени, приняв во внимание, что α=ωэл.двt и γ=ƒ(t) имеем;
ωδ = (еα sinα - bγ sinγ)tgβ.
У известного привода амплитуда колебаний определяется величиной кривошипа, который у прототипа представлен шлицевой меткой вала, на шлицы которого надета шлицевая эксцентричная втулка. Для изменения амплитуды необходимо остановить привод, вывести эксцентричную втулку из зацепления и переместить, например на один зуб по часовой стрелке.
Недостатком вышеописанного устройства является невозможность регулирования на ходу, ступенчатое регулирование и небольшой диапазон, определяемый количеством шлицов. Все это не позволяет найти оптимальный режим колебаний для обработки резанием и оценить его под нагрузкой.
Задачей, на решение которой направлено предлагаемое устройство, является плавное регулирование тангенциальных вибраций в процессе обработки и расширение диапазона регулирования, а следовательно оптимизация обработки.
Поставленная цель реализуется за счет того, что на колене кривошипного вала, как на водиле, свободно установлен сателлит с эксцентрично прикрепленной втулкой связанной с шатуном и зацепляющийся с внутренним венцом косозубого колеса, свободно установленного на кривошипном валу и связанного с косозубой шестерней дополнительного вала, Вторая косозубая шестерня дополнительного вала связана с косозубым колесом, жестко установленным, на кривошипном валу.
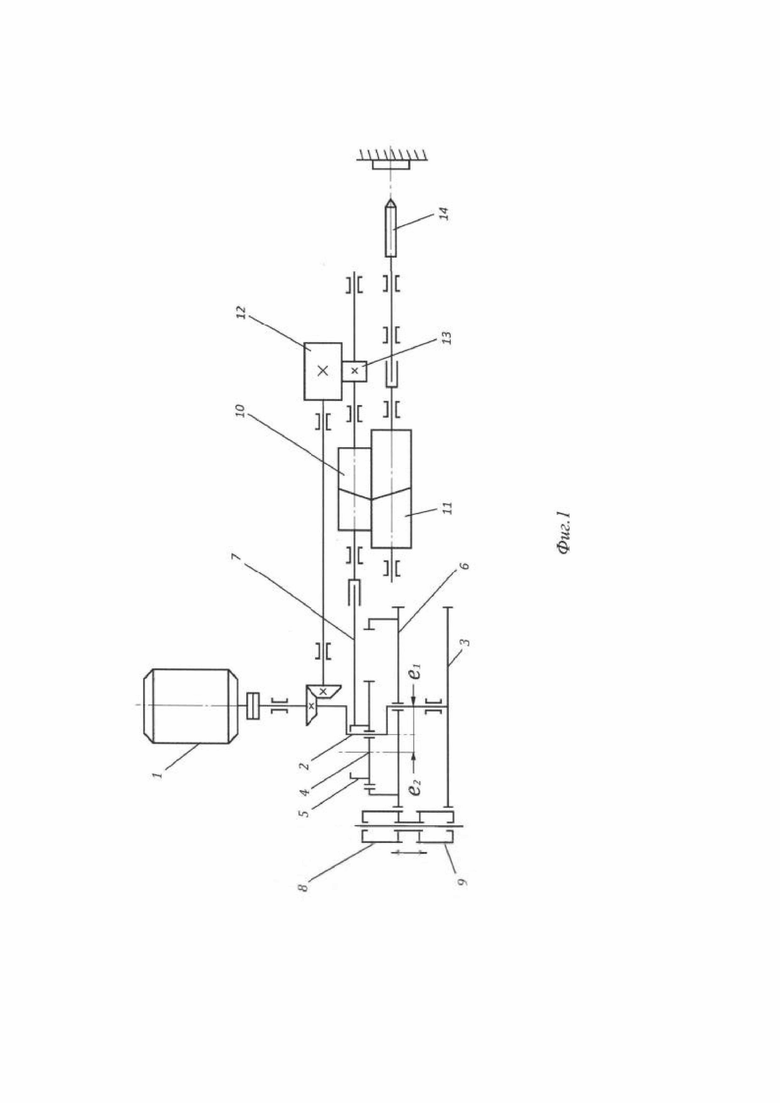
В состав регулируемого привода шпинделя для тангенциальных, вибраций (Фиг. 1) входит электродвигатель 1, кривошипный вал 2 с жестко насаженным косозубым колесом 3. На колене кривошипа с радиусом е1, как на водиле свободно установлен сателлит 4, к которому с эксцентриситетом e2 прикреплена втулка 0,5. Сателлит 4 находится в зацеплении с внутренним венцом косозубого колеса 6, свободно установленного на валу 2. Втулка 5 соединена с шатуном 7.
Косозубые колеса 5 и 6 одного диаметра и с одинаковым числом зубьев. При равном по величине они имеют противоположный по знаку угол наклона зубьев. Эти колеса находятся в зацеплении с колесами 8 и 9, которые выполнены в виде одного блока на дополнительном валу и могут перемешаться вдоль оси. При неподвижном в осевом направлении блока колес 7 и 8 отсутствует вращение колеса 6 относительно вала 2 и остается неизменной величина кривошипа r=e1+e2.
Работа устройства начинается с изменения размера кривошипа r за счет осевого перемещения блока 8-9. При этом вследствие разного угла наклонов зубьев 3-9 и 6-8 колесо 6 повернется, с ним относительно вала 2 повернется колесо 4, следовательно изменится эксцентриситет r, амплитуда колебаний косозубой шестерни 10, а так как это пара косозубых колес, то изменится амплитуда крутильных колебаний колеса 11 и, соответственно шпинделя 14.
При регулировании может существовать такое положение, когда r=0 и вращение шпинделя 14 будет безвибрационным, что даст возможность сравнить виброрезание с тангенциальными колебаниями и без вибрационное, а плавность регулирования позволит оптимизировать процесс резания, что невозможно в уже известных технических решениях.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. А.с. 602311 СССР: М Кл2, В23В 47/00. Привод шпинделя.
2. Подураев В.Н. Обработка резанием с вибрациями. М: Машиностроение. 1970, 350 с.
3. Рызванович А.Я., Капралов В.В., Генералов В.А. Вибрационная обработка с крутильными колебаниями шпинделя. М: Вестник машиностроения. 2016, №6, с. 31-35.
4. Рызванович A.Я., Шмулевский Д.Б. Анализ способов регулирования крутильных колебаний шпинделя. М; Вестник машиностроения. 2018, №6, 38-41 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шпинделя | 1974 |
|
SU602311A1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ КРИВОШИПА ПЕРЕМЕННОЙ ДЛИНЫ | 1998 |
|
RU2139459C1 |
| Устройство для дуговой сваркиС КОлЕбАНияМи элЕКТРОдА | 1977 |
|
SU795809A1 |
| Привод шпинделя | 1977 |
|
SU666001A2 |
| Механизм толчковой подачи лесопильной рамы | 1988 |
|
SU1675081A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1990 |
|
RU2030228C1 |
| Привод клети стана холодной прокатки труб | 1979 |
|
SU884761A1 |
| ПОРШНЕВАЯ МАШИНА | 1996 |
|
RU2115805C1 |
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
| Приводное устройство регулируемого объемного насоса | 1984 |
|
SU1652648A1 |
Изобретение относится к области станкостроения и может быть использовано в силовых головках и металлорежущих станках. Изобретение обеспечивает плавное регулирование тангенциальных вибраций в процессе обработки и расширение диапазона регулирования. Регулируемый привод шпинделя для тангенциальных вибраций состоит из электродвигателя и промежуточной передачи, у которой модуляция скорости инструмента относительно заготовки достигается за счет применения соединенного с электродвигателем кривошипно-шатунного механизма со ступенчато регулируемой длиной кривошипа и зубчатой передачи, являющейся косозубой. При этом одна шестерня передачи соединена со шпинделем, а другая жестко установлена на ползуне кривошипно-шатунного механизма, выполненном в виде вала, и связана через упомянутую передачу с электродвигателем. Для плавного регулирования модуляции скорости инструмента относительно заготовки на ходу и под нагрузкой на колене кривошипного вала, как на водиле, свободно установлен сателлит с эксцентрично прикрепленной втулкой, связанной с шатуном и зацепляющейся с внутренним венцом косозубого колеса, свободно установленного на кривошипном валу и связанного с косозубой шестерней дополнительного вала, вторая косозубая шестерня которого связана с косозубым колесом, жестко установленным на кривошипном валу. 1 ил.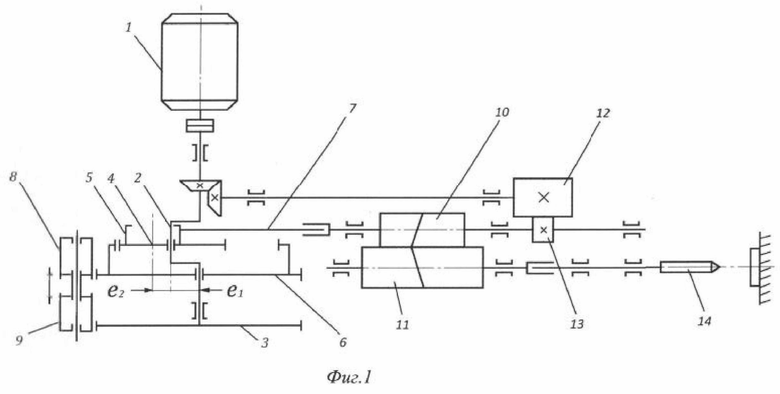
Регулируемый привод шпинделя для тангенциальных вибраций, состоящий из электродвигателя и промежуточной передачи, у которой модуляция скорости инструмента относительно заготовки достигается за счет применения соединенного с электродвигателем кривошипно-шатунного механизма со ступенчато регулируемой длиной кривошипа и зубчатой передачи, являющейся косозубой, одна шестерня которой соединена со шпинделем, а другая жестко установлена на ползуне кривошипно-шатунного механизма, выполненном в виде вала, и связана через упомянутую передачу с электродвигателем, отличающийся тем, что для плавного регулирования модуляции скорости инструмента относительно заготовки на ходу и под нагрузкой на колене кривошипного вала, как на водиле, свободно установлен сателлит с эксцентрично прикрепленной втулкой, связанной с шатуном и зацепляющейся с внутренним венцом косозубого колеса, свободно установленного на кривошипном валу и связанного с косозубой шестерней дополнительного вала, вторая косозубая шестерня которого связана с косозубым колесом, жестко установленным на кривошипном валу.
| Привод шпинделя | 1974 |
|
SU602311A1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |
| Привод шпинделя для вибрационного резания | 1978 |
|
SU742046A1 |
| Привод шпинделя для вибрационного резания | 1977 |
|
SU657926A1 |
| Привод шпинделя для вибрационного резания | 1977 |
|
SU653041A1 |
| US 3030827 A1, 24.04.1962. | |||
