Изобретение относится к технике нэсо- состроения и может быть использовано, в частности, в приводе дозировочных насосов.
Цель изобретения - обеспечение линейного закона регулирования длины хода толкателя при неизменном положении его передней крайней точки перемещения.
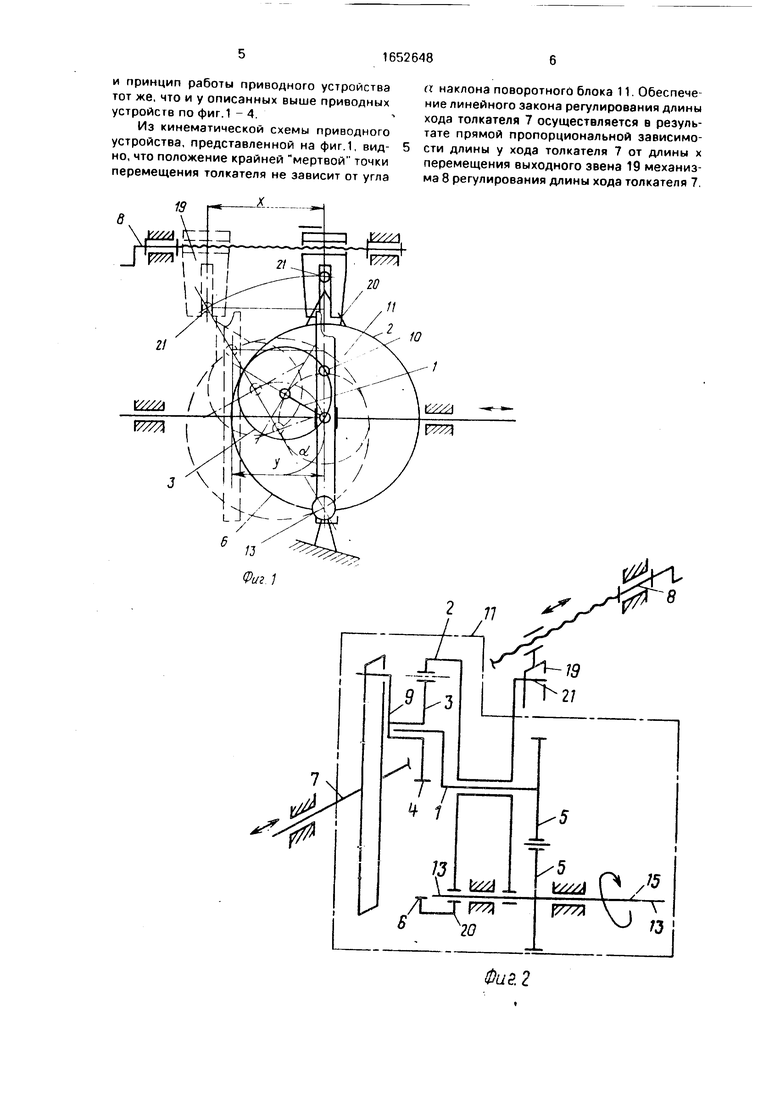
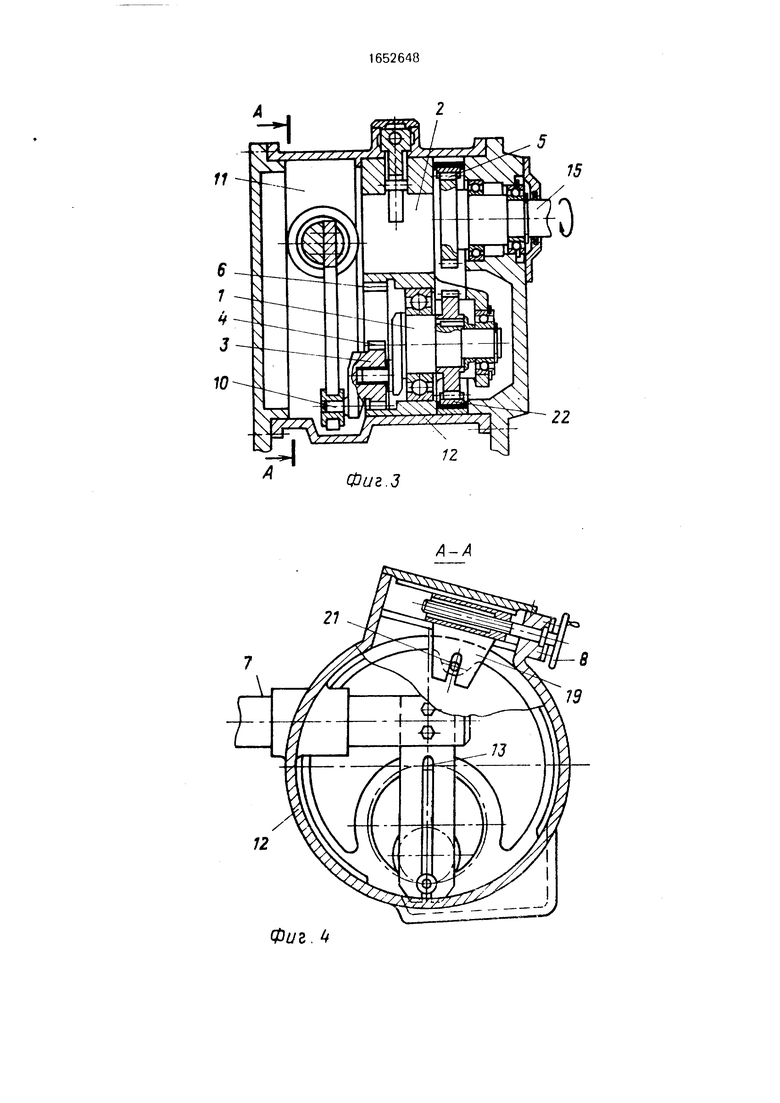
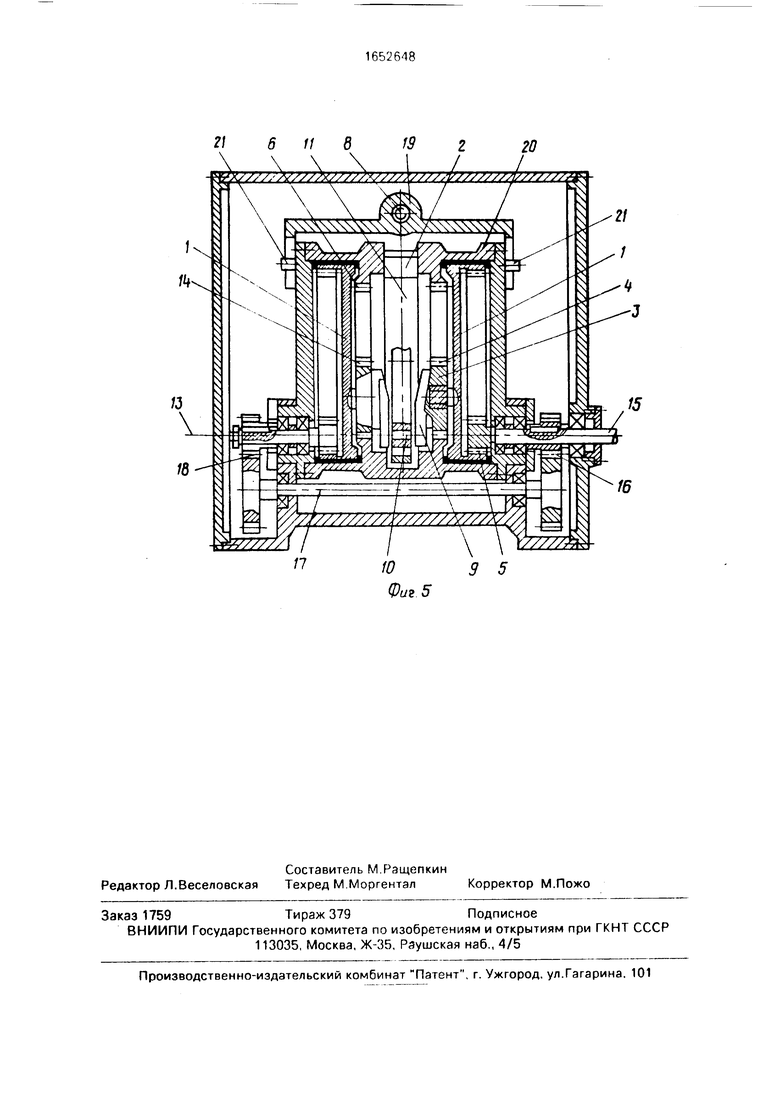
На фиг.1 представлена кинематическая схема приводного устройства регулируемого объемного насоса, вид сбоку; на фиг.2 - кинематическая схема приводного устройства насоса, вид в аксонометрии; на фиг.З - поворотный блок приводного устройства, выполненный в виде цилиндра; на фиг.4 - разрез А - А на фиг.З; на фиг.5 -- приводное устройство объемного насоса с двумя пла- нетарно-кривошипными механизмами.
Приводное устройство регулируемого объемного насоса содержит кривошипно- планетарный механизм, который имеет водило 1 с расположенными внутри центрального колеса 2 сателлитом 3 с зуб чатым венцом 4, кинематически связанное через зубчатую передачу 5 с двигателем (не показан) и через сателлит 3 с зубчатым венцом 6 центрального колеса 2и с толкателем 7 насоса. Механизм 8 регулирования длины хода толкателя 7 соединен с центральным колесом 2 кривошипно-планетарного механизма с возможностью его поворота при регулировании длины хода толкателя 7. Сателлит 3 снабжен жестко соединенным с ним кривошипом 9, например, с ползуном 10, при этом сателлит 3 может быть, например, кинематически связан с толкателем 7 через кривошип 9 с возможностью продольного перемещения шарнирно установленного в толкателе 7 ползуна 10 кривошипа 9.
Соотношение диаметров начальных окружностей зубчатых венцов 4 и 6, соответственно, сателлита 3 и центрального колеса 2, а кривошипно-планетарный механизм выполнен в виде единого блока 11 (фиг.2) с возможностью его поворота при регулировании длины хода толкателя 7 вокруг оси. совпадающей с осью 10 кривошипа 9 при его максимальном удалении от оси водила 1.
Радиус кривошипа 9 сателлита 3 может быть выполнен равным радиусу начальной окружности зубчатого венца 4 сателлита 3.
Поворотный блок 11 приводного устройства может быть выполнен в виде цилиндра 12 (фиг.З и 4), продольная ось 13 которого совпадает с осью поворота блока 11 при регулировании длины хода толкателя 7.
С целью разгрузки сателлита 3 поворотный блок 11 может быть также снабжен дополнительным кривошип но-п л а нетарным механизмом (фиг.5), который подключен к двигателю (не показан) и имеет общий вид с основным кривошипно-планетарным механизмом сателлит 3. выполненный в виде одноколейного вала с двумя зубчатыми венцами 4 и 14. Вращение от двигателя к дополнительному кривошипно-n л а нетарному механизму передается от ведущего вала
15 через зубчатую передачу 16, синхронизирующий вал 17 и зубчатую передачу 18.
Выходное звено 19 механизма 8 регулирования связано с корпусом 20 поворотного
блока 11 через ось 21
Передача крутящего момента от ведущего вала 15 водилу 1 в приводном устройстве (на фиг.З) осуществляется с использованием промежуточной шестерни 22.
0Приводное устройство объемного насоса
работает следующим образом
Подводимый к ведущему валу 15 крутящий момент передается от двигателя через зубчатую передачу на водило 1. При враще5 нии водила 1 сателлит 3 перемещается по диаметру начальной окружности зубчатого венца центрального колеса 2.
В положении кивошипно-планетарного механизма, изображенном на фиг.1 сплош0 ными линиями, ползун 10 движется в пазу толкателя 7, не перемещая его (положение нулевого хода). При повороте поворотного блока 11 вокруг оси 13 на некоторый угол (положение кривошипно-планетгрного ме5 ханизма изображено пунктирными линиями) ползун 10 движется в пазу толкателя 7, задавая ему возвратно-поступательное движение с ходом у.
Пример конструктивного исполнения
0 приводного устройства, представленный на фиг.З и 4, отличается тем. что поворотный блок 11 выполнен в виде цилиндра, продольная геометрическая ось которого совпадает с осью 13 поворота блока 11 при
5 регулировании хода толкателя 7 Это упрощает конструкцию, расширяет возможность компоновки механизма 8 регулирования длины хода толкателя 7 и расширяет выбор местоположения оси 21. В этом исполнении
0 передача крутящего момента от ведущего вала 15 водилу 1 осуществляется через зубчатую передачу 5 с промежуточной шестерней 22. Остальные кинематические связи остаются без изменений и принцип работы
5 приводного устройства тот же, что и у описанного выше приводного устройства по фиг.1 и 2.
Пример конструктивного исполнения приводного устройства, представленный на
0 фиг.5. отличается тем. что в корпусе 20 поворотного блока 11 расположены два кри- вошипно-планетарных механизма, состоящих из двух водил 1. имеющих общий сателлит 3, выполненный в виде одноколен5 кого вала с двумя зубчатыми венцами 4 и 14. Подвод крутящего момента от ведущего вала 15 к водилу 1 осуществляется через зубчатую передачу 16. синхронизирующий вал 17 и зубчатую передачу 18. Остальные кинематические связи остаются Оез изменений
и принцип работы приводного устройства тот же, что и у описанных выше приводных устройств по фиг. 1 - 4.
Из кинематической схемы приводного устройства, представленной на фиг.1, видно, что положение крайней мертвой точки перемещения толкателя не зависит от угла
а наклона поворотного блока 11. Обеспечение линейного закона регулирования длины хода толкателя 7 осуществляется в результате прямой пропорциональной зависимости длины у хода толкателя 7 от длины х перемещения выходного звена 19 механизма 8 регулирования длины хода толкателя 7.

8
77
Фиг 2
22
г/
Ј гпф
U
8fr9Z99l
11 в
19
20
| 0 |
|
SU187524A1 | |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
