Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе запуска роботов с кабелем для использования в нефтяных и газовых трубопроводах. Упомянутая система может быть отделимой от трубы, используемой для транспортировки робота, приспосабливаемой к разным конфигурациям и содержать систему, которая позволяет осуществлять инертизацию в забитых отложениями трубопроводах. Настоящее изобретение используется для введения роботов, которые работают внутри в гибких и жестких трубах, при этом необходимо соединять трубопроводную систему с разработанным оборудованием. При наличии упомянутого соединения и оперируя клапанами системы, можно вводить робот в трубопровод.
Уровень техники
[0002] Используемые в настоящее время способы очистки трубопровода разведки нефти, который содержит парафиновые отложения или который оказался закупоренным вследствие образования какого-либо другого типа твердого углеводорода, включают нагрев трубопровода или участка, использование скребков или введение модифицирующих кристаллы химических веществ для растворения причины закупорки. Притом, что это очень дорогостоящие операции, нет гарантии, что такие методы будут работать и что поток нефти будет установлен.
[0003] Использование полуавтономных роботов внутри закупоренного трубопровода представлено в качестве варианта решения данной проблемы, который сталкивается с большим сопротивлением в системе для ведения робота внутрь труб. Способом, имеющим наибольшее сходство с настоящим изобретением, является система запуска скребков с нефтяных платформ, которая представляет собой систему, которая требует разности давлений между точками входа и выхода для скребков. Однако запуск полуавтономных роботов, которые соединены с пуповинными кабелями внутри трубопровода, обычно предполагается для «неочищаемого» оборудования, вследствие препятствий в потоке, поскольку упомянутые препятствия препятствуют разности давлений, которая необходима для оборудования типа скребков. Кроме того, запуск робота, прикрепленного к пуповинному кабелю в неочищаемой трубе через уже существующую систему запуска скребков, технически невозможен вследствие сложности в распределении конструкций и оборудования, требующихся на палубе платформы. Это объясняется необходимостью значительных приспособлений к существующей системе и несовместимостью роботизированного оборудования с системой запуска скребков. К тому же, на значительном количестве платформ отсутствует система запуска скребков.
[0004] Робот для работы в глубоководных участках, способный перемещать инструментальные средства, неизбежно длинный и тяжелый. Для транспортировки нужно, чтобы он уже находился в секции трубы, в которой он может быть активирован, и начинал свой спуск через гибкую трубу. В качестве требования безопасности, электрическое оборудование должно быть защищено для работы в классифицированной зоне. Внутри трубы существует взрывоопасная атмосфера, называемая зоной О, которая является зоной с очень высоким риском взрыва. Поэтому для того чтобы подключить робот к источнику электроэнергии, необходимо заполнить внутреннее пространство запускающей трубы инертным газом или текучей средой, которая вытесняет кислород из трубы, в которой расположен робот.Только таким образом можно гарантировать, что искра или горячая поверхность на роботизированной системе не вызовет взрыв.
[0005] Если робот содержит соединение с поверхностью, известное также как пуповинный кабель, то окружная поверхность данного кабеля должна быть уплотнена так, чтобы все пространство внутри запускающей трубы не содержало кислорода. Однако после того как робот начинает свое спуск, данное уплотнение должно быть ослаблено так, чтобы кабель мог проходить в трубу. Когда данный пуповинный кабель входит в трубу, должен быть предусмотрен выпуск для текучей среды, иначе будет увеличиваться внутреннее давление внутри трубы, создающее большее сопротивление перемещению роботизированной системы или даже препятствуя ее перемещению.
[0006] Если робот осуществляет операцию очистки, то существует риск того, что как только сужение будет устранено, поток нефти или газа под давлением будет подниматься через трубу до платформы. Данный риск является критическим для безопасности платформы, и безопасность должна быть гарантирована, даже если пуповинный кабель проходит через отверстие запускающей системы. Если давление, исходящее из скважины, контролировать невозможно, то робот не может быть удален из трубы и, что более серьезно, существует риск пожара и взрыва. Таким образом, должна быть предусмотрена система, которая позволяет удалять робот при находящейся под давлением трубе. Если отводить давление посредством некоторого отклонения в трубе, которая ведет к запускающей системе, то данное отклонение должно быть таким, чтобы оно не мешало перемещению робота.
[0007] Безопасность платформы не может зависеть только он одного элемента, поэтому системы безопасности должны быть резервированными, и данное резервирование не может быть только дублированием систем, поскольку тип неисправности, которая влияет на элемент, может повторяться. Когда робот возвращается в запускающую систему, должен быть способ замещения объема пуповинного кабеля, который выходит из трубы, текучей средой, чтобы предотвратить попадание кислорода в трубопровод и образование взрывоопасной атмосферы. При возвращении в запускающую систему детали робота будут загрязнены нефтью, возможно испаряющимися токсичными газами, и должен быть предусмотрен способ промывки робота внутри запускающей системы, поскольку из-за его размера промывка в другом месте может быть невозможна.
[0008] Документ KR101384268 В1 относится к системе запуска и удаления робота, причем данная запускающая система является постоянно находящейся и в принципе не применима в ситуациях, в которых она не установлена заранее. В случае данного изобретения, запускающая система является отделяемой и может быть установлена на плавучей системе добычи, хранения и отгрузки углеводородов (Floating Production Storage and Offloading - FPSO) или полупогружной платформе и удалена после работы. При этом не стоит задача установить запускающую систему на каждой FPSO.
[0009] Кроме того, документ KR 101384268 В1 рассматривает робот без пуповинного кабеля. В случае настоящего изобретения предлагается запускающая система для роботов с пуповинным кабелем. Хотя это может показаться небольшим отличием, использование пуповинного кабеля позволяет осуществлять циркуляцию большого объема текучей среды.
[0010] Документ ISBN 978-0-12-383846-9 (Standard Handbook of Petroleum and Natural Gas Engineering, William C. Lyons) относится к справочному руководству, содержащему информацию по разработке месторождений нефти и природного газа. Объемная компенсация, использование противовыбросового превентора (Blowout Preventor - BOP), использование инертных текучих сред являются обычными операциями в данной области техники.
[0011] Документ UPC 640522583300 относится к устройству зачистки проводов. Отмечается, что нет близкого родства между описанным в данном документе устройством зачистки проводов и предметом, который является целью настоящего изобретения. В случае настоящего изобретения, задача состоит в том, чтобы не повредить кабель. В случае устройства зачистки проводов, задача состоит в том, чтобы разрезать изоляцию кабеля. В случае настоящего изобретения, зачистка представляет собой процесс, который осуществляется с целью обеспечения возможности вставки кабеля при поддержании уплотнения. В случае упомянутого устройства зачистки проводов, зачистка служит для разрезания внешнего слоя изоляции.
[0012] Таким образом, отмечается, что ни один из вышеупомянутых документов не предлагает стратегию для введения из запускающей системы в закупоренный отложениями трубопровод. В таких трубопроводах обычные стратегии инертизации не применимы. Такими стратегиями являются, например, дизельное глушение и циркуляция азота.
[0013] Кроме того, ни один из данных документов не описывает подвижную зарешеченную конструкцию с гибким трубопроводом. Это допускает использование в разных конфигурациях и ее использование, например, в вертикальной трубе. Данная конструкция обеспечивает хорошую приспосабливаемость для адаптации к разным геометриям.
[0014] Кроме того, ни один из данных документов не упоминает или подробно не описывает использование лабиринтных уплотнений для динамического уплотнения кабелей при аксиальном перемещении.
[0015] Как будет описано ниже, при наличии системы настоящего изобретения, помимо обеспечения допуска к трубопроводу, дополнительно упомянутое оборудование может также служить для транспортировки робота.
[0016] Ни один из вышеупомянутых документов не показывает, как обеспечить проводку пуповинного кабеля, при этом сохраняя в целости уплотнение системы.
[0017] Документы US 20080202594A1, US6769152B1 и US5219244A показывают системы запуска скребков, и отмечается, что хотя это имеет отношение к точке ввода для робота, но не в том случае, если он содержит пуповинный кабель, помимо того, что не позволяют системе перемещения робота действовать, если она не может приспосабливаться к отклонениям в диаметре трубопровода.
[0018] Документ US201 6369931A описывает запускающую систему для трубы под давлением, которая включает конструкцию, которая может быть прикреплена к трубопроводу так, что внутренняя часть упомянутой конструкции открыта к внутренней части трубопровода, а внешняя часть конструкции находится под воздействием внешней среды относительно трубопровода. Первый исполнительный узел расположен на внешней стороне конструкции, а второй исполнительный узел расположен внутри конструкции. В корпусе между первым исполнительным узлом и вторым исполнительным узлом расположен уплотнительный узел. Каждый из узлов из первого и второго исполнительных механизмов выполнен с возможностью приема кабеля, при этом одна часть проходит снаружи конструкции, одна часть проходит через уплотнительный узел, и одна часть проходит внутри корпуса. Исполнительные узлы могут приводиться в действие независимо, чтобы протянуть кабель относительно уплотнительного узла для перемещения кабеля внутри и снаружи трубопровода.
[0019] Конструкция, описанная в US201 636993А1, включает уплотнительный узел, который выполнен так, чтобы охватывать кабель, который проходит снаружи трубопровода внутрь трубопровода, так что выпуск газа под давлением из трубопровода во внешнюю среду относительно трубопровода предотвращен.
[0020] Кроме того, US201 636993А1 описывает противовыбросовый узел в запускающей системе, предусматривающий наличие кабелей электропитания с кольцевыми уплотнениями. Необходимо отметить, что настоящее изобретение использует лабиринтную уплотнительную систему.
[0021] Отмечается, что платформа для запуска роботов для очистки и/или диагностики труб в глубоководных участках, способных транспортировать инструментальные средства, является длинной и тяжелой. Для того чтобы начать процесс перемещения, нужно, чтобы робот уже находился в секции трубы для облегчения транспортировки, а учитывая высокий риск взрыва, его электрическая система должна быть подключена безопасно. Она должна быть способна опускаться и подниматься через гибкую трубу. Поскольку использование управляющего и энергетического пуповинного кабеля является общепринятой практиков, система, которая предотвращает подъем текучей среды, противовыбросовая система, должна учитывать наличие данного кабеля. Отклонение, которое отводит давление из трубы, должно быть выполнено таким образом, чтобы оно не мешало перемещению робота, и необходимо обеспечить резервирование для большей безопасности. Необходимо предусмотреть объемную компенсацию и давление в трубе для смещения входа и выхода робота и кабеля, для предотвращения выброса и для предотвращения попадания кислорода в трубу. Существует также потребность в системе очистки для удаления углеводородов и паров из робота.
[0022] Для решения этих проблем настоящее изобретение предлагает систему запуска и удаления очищающих или диагностирующих роботов. Данная система представляет собой наклонную трубу для облегчения запуска робота. Упомянутая труба встроена в добывающую или буровую трубу. Она содержит клапаны для предотвращения выбросов с учетом наличия пуповинного кабеля. Изобретение включает систему для очистки робота внутри запускающей трубы, использование инертной текучей среды для безопасного включения электрической системы робота и систему, которая компенсирует изменение в объеме и давлении внутри трубы при введении или удалении робота и его кабеля. Изобретение также модифицирует участок отклонения постепенно для облегчения прикрепления роботов с крючками и/или зажимами, чтобы не препятствовать отклонению трубы.
Краткое описание чертежей
[0023] Настоящее изобретение будет более подробно описано ниже, ссылаясь на прилагаемые чертежи, которые, не ограничивая объем изобретения, показывают предпочтительный вариант осуществления.
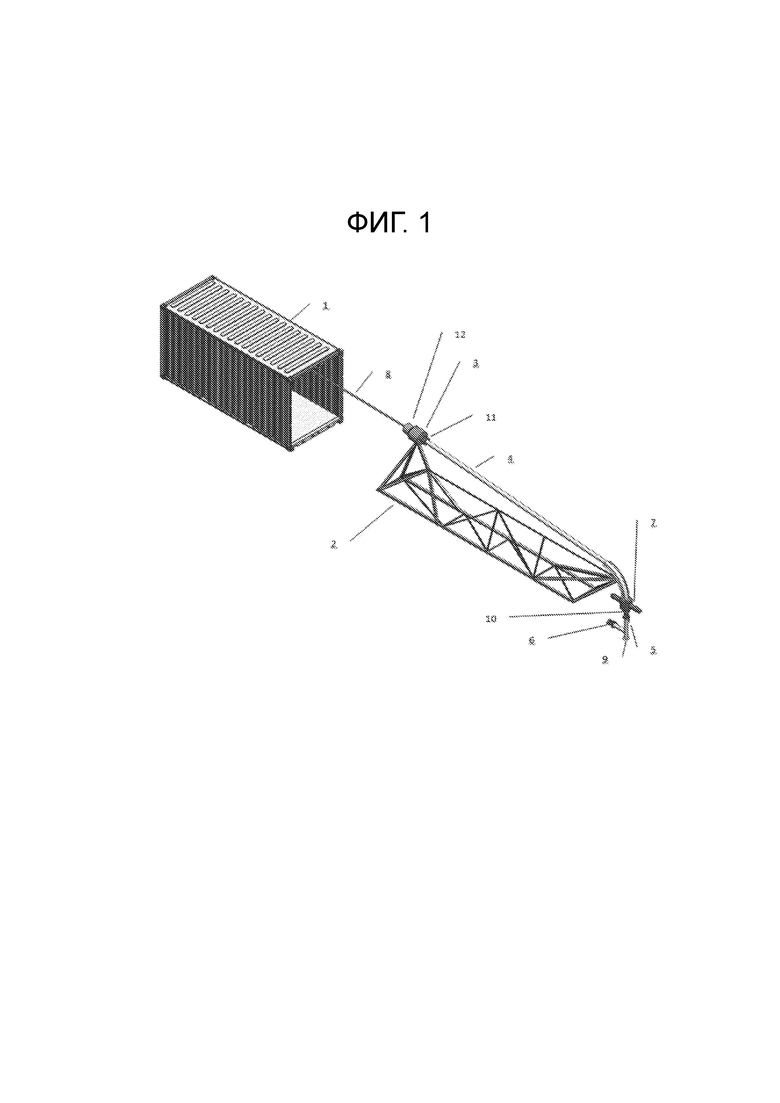
Фиг. 1 показывает систему настоящего изобретения, установленную в модуле хранения и управления;
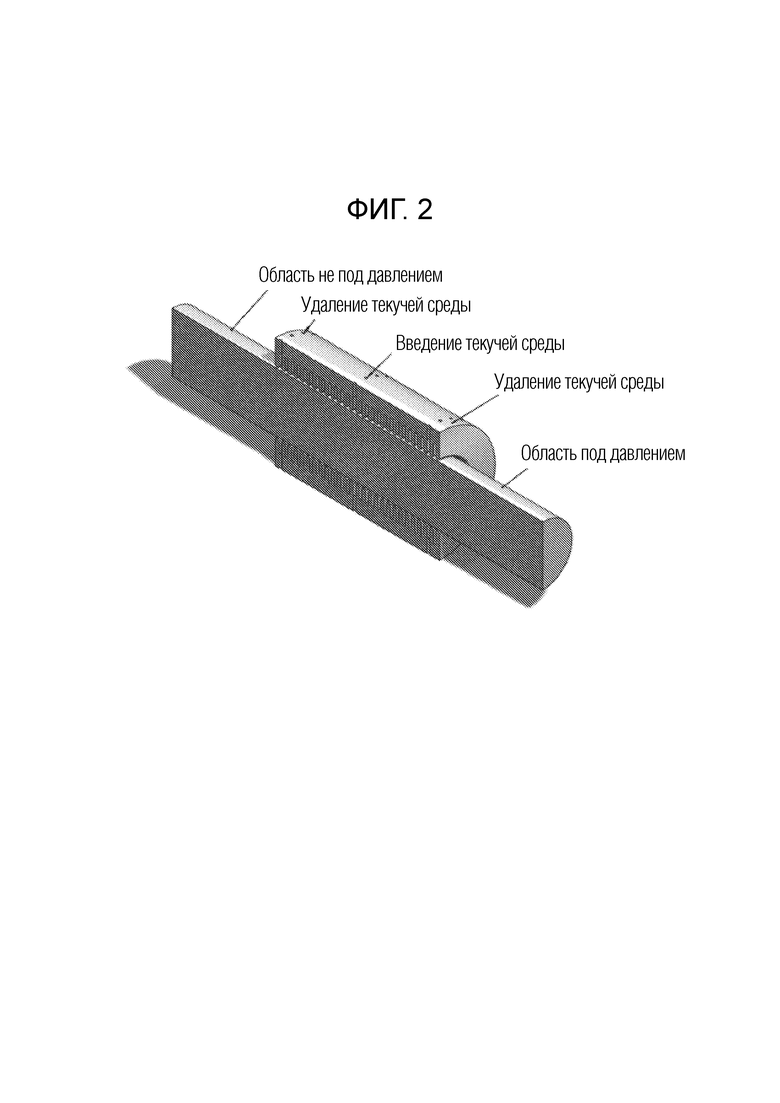
Фиг. 2 показывает использование лабиринтных уплотнений для динамической фиксации кабелей с аксиальным перемещением в соответствии с настоящим изобретением.
Подробное описание изобретения
[0024] Система настоящего изобретения содержит опорную конструкцию (2), в которой размещается труба (4) запуска робота; на входном конце данной трубы закреплено динамическое уплотнение (12), уплотняющее на пуповинном кабеле (8), и кольцевой противовыбросовый (Blowout Preventer - BOP) клапан (3), осуществляющий ограничение восходящего потока. Динамическое уплотнение (12) и клапан (3) будут разъединены, либо посредством разборки или посредством отверстия для введения робота или соединения пуповинного кабеля с роботом. На другом конце трубы (4) расположен плунжерный ВОР клапан (7), который ограничивает восходящие потоки. Плунжерный ВОР клапан (7) должен содержать достаточно большое отверстие, чтобы обеспечить прохождение робота, и он должен быть способен осуществлять уплотнение на пуповинном кабеле (8).
[0025] За ВОР клапанами (3) и (7) расположены два клапана (10) и (11). Они используются в процессе инертизации и очистки оборудования, при этом клапан (11) является входом, а клапан (10) - выходом для очищающей или инертизирующей текучей среды, или наоборот.
[0026] За клапаном (10), на конце запускающей трубы (4), будет расположен шаровой клапан (5) для доступа к трубопроводу, и сразу за ним будет расположено ответвление (9) с клапаном (6) для направления избыточной текучей среды прямо в горелку. Данное отклонение будет содержать каркас в отверстии ответвления от основной трубы так, что предусмотрена опора для робота на данном каркасе, чтобы обеспечить возможность продвижения робота.
[0027] Оборудование соединено с производственной трубой, в которую будет вводиться робот, через ответвление (9). Перед опорной конструкцией (2) будет размещен блок (1) хранения от пуповинного кабеля и центра управления роботом и от процесса. Динамическое уплотнение (12) в частности может принимать разные конфигурации. Одной возможной конфигурацией является использование металлических, керамических или эластомерных уплотнений, в данном случае с или без внутренних стальных структур. Данные уплотнения могут быть разных типов и из разных материалов: О-образные, Х-образные, П-образные, квадратные, прямоугольные, манжетные и др. Другой возможной конфигурацией является использование лабиринтных уплотнений и многоступенчатых лабиринтных уплотнений. Дополнительно, данное лабиринтное уплотнение может содержать внутренние впуски и/или выпуски текучей среды для предотвращения попадание текучей среды из линии трубопровода в окружающую среду. Лабиринтное уплотнение может принимать разные геометрии, такие как прямое уплотнение, прямоугольное уплотнение и зубчатое уплотнение. Дополнительно, оно может также содержать скребки для увеличения потери нагрузки.
[0028] Таким образом, настоящее изобретение включает трубу (4), которая расположена под углом относительно горизонтальной линии, в которой размещается роботизированная система для транспортировки и соединения с линией добычи углеводородов. Данная труба позволяет осуществлять перемещение робота посредством его системы перемещения и выдерживает давление, которое может исходить из скважины.
[0029] Настоящее изобретение помещает два клапана (10, 11) в трубу (4) на каждом конце трубы (4), так что труба очищена от кислорода и заполнена инертной текучей средой.
[0030] На входе трубы (4) кольцевой ВОР клапан (3) используется для регулирования давления путем зажимания его эластомерной контактной поверхности на периферии пуповинного кабеля робота. Данный клапан может быть полностью открыт, чтобы обеспечивать доступ к роботу во время его сборки, когда его соединяют к пуповинному кабелю, или зажат на кабеле, когда в системе возникает пик давления.
[0031] Кроме того, клапан (11) используется в данном изобретении для сбора текучей среды из трубопровода, когда в него входит пуповинный кабель, осуществляя объемную компенсацию.
[0032] Если, во время введения, труба находится под воздействием давления из скважины, изобретение содержит отклонение (9), так что давление текучей среды может быть сброшено в горелку на платформе или в резервуар-хранилище. В запускающей трубе (4) неизбежно будет присутствовать давление, и если динамическое уплотнение будет не способно поддерживать давление, то будет приведен в действие кольцевой ВОР клапан (3), предотвращающий утечки в области запускающей системы. Дополнительно, в качестве резервирования для безопасности системы, непосредственно над отклонением (9) может быть размещен второй ВОР клапан (7), уже плунжерного типа, уплотняющий по периметру пуповинного кабеля, если возникают какие-либо проблемы с динамическим уплотнением и кольцевым ВОР клапаном (3).
[0033] Настоящее изобретение использует динамическое уплотнение (12) для обеспечения возможности прохождения кабеля при поддержании уплотнения. Как вариант, кольцевой ВОР клапан (3) может быть использован для осуществления процесса, известного как стриппинг, когда пуповинный кабель протягивают при кольцевом клапане под давлением поверх периферии кабеля, чтобы предохранить данную контактную поверхность от просачивания текучей среды из скважины. После возвращения робота в запускающую трубу (4) приводится в действие обычный клапан (5), который изолирует запускающую трубу (4) для безопасного удаления робота.
[0034] Кроме того, настоящее изобретение модифицирует зону отклонения, где отверстие, которое ведет в секцию трубы, которая подсоединена в клапане (6), содержит каркас, так что ноги робота поддерживаются, но без блокирования потока углеводородов, исходящего из скважины. Поэтому используются разные типы ВОР клапанов, кольцевой и плунжерный клапан, чтобы гарантировать, что одинаковый тип отказа не возникает в обоих клапанах.
[0035] Текучая среда вводится через клапан (11) в запускающую трубу, когда робот возвращается и пуповинный кабель оттянут назад.
[0036] При использовании клапанов (10) и (11), после закрытия клапана (5), растворитель может циркулировать через запускающую трубу (4) до тех пор, пока детали робота не станут свободными от нефти.
[0037] Следует отметить, что хотя настоящее изобретение описано со ссылкой на прилагаемые чертежи, оно может подвергаться модификациям и доработкам специалистами в данной области техники, в зависимости от конкретной ситуации, но без выхода за рамки объема настоящего изобретения, определенного в данном документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ НАСОСНАЯ СИСТЕМА И СПОСОБ ПЕРЕКАЧКИ ТЕКУЧЕЙ СРЕДЫ ИЗ ПОДЗЕМНОЙ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ ДАННОЙ СИСТЕМЫ | 2010 |
|
RU2569139C2 |
| СИСТЕМА ДЛЯ РАЗБЛОКИРОВАНИЯ ИЛИ ОЧИСТКИ ТРУБОПРОВОДОВ ПОСРЕДСТВОМ УПРАВЛЯЕМОЙ ЛОКАЛЬНОЙ РЕАКЦИИ | 2020 |
|
RU2818518C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ЗАПУСКА ОДНОГО ИЛИ БОЛЕЕ СКРЕБКОВ В ТЕХНОЛОГИЧЕСКИЙ ПОТОК | 2015 |
|
RU2713934C2 |
| ОБЪЕМНЫЙ НАСОС | 2018 |
|
RU2763010C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ НАСОСНОЙ СИСТЕМЫ И НАСОСНАЯ СИСТЕМА, ВКЛЮЧАЮЩАЯ ТАКОЕ УСТРОЙСТВО | 2006 |
|
RU2331798C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПОВОРОТНЫЙ СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ДЛЯ ТРУБОПРОВОДОВ С ТЕКУЧЕЙ СРЕДОЙ (ВАРИАНТЫ) | 2007 |
|
RU2406010C2 |
| СИСТЕМА ЗАПУСКА СКРЕБКА С НАПРАВЛЕННЫМ СТРУЙНЫМ ИМПУЛЬСОМ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2018 |
|
RU2776831C2 |
| ПОДВОДНАЯ УСТАНОВКА ДЛЯ БЕСПРИЧАЛЬНОЙ ЗАГРУЗКИ/ВЫГРУЗКИ ТЕКУЧЕЙ СРЕДЫ | 2015 |
|
RU2610844C1 |
| СИСТЕМА ДЛЯ ВВЕДЕНИЯ НАГНЕТАТЕЛЬНОЙ ТЕКУЧЕЙ СРЕДЫ В ПОТОК УГЛЕВОДОРОДНОЙ ЖИДКОСТИ | 1995 |
|
RU2130112C1 |
| СПОСОБ ОЧИСТКИ ГИБКИХ ТРУБОПРОВОДОВ С ИСПОЛЬЗОВАНИЕМ ГИБКОГО ШЛАНГА ОТ ПРОМЫСЛОВОЙ БУРОВОЙ УСТАНОВКИ | 2020 |
|
RU2818350C1 |
Изобретение относится к системе запуска роботов для использования в скважинах для добычи нефти и газа. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб, содержащая: опорную конструкцию, в которой расположена труба запуска робота; уплотнительный узел, включающий: динамическое уплотнение, закрепленное на входном конце трубы запуска робота, уплотненное на пуповинном кабеле; кольцевой ВОР клапан для ограничения восходящего потока; и плунжерный ВОР клапан на другом конце трубы для ограничения восходящих потоков, содержащий отверстие, которое является достаточным для обеспечения прохождения робота, уплотняющего на пуповинном кабеле. Технический результат – обеспечение объемной компенсации и давления для предотвращения выбросов и для предотвращения попадания кислорода в трубу, а также обеспечение удаления углеводородов и паров из робота. 11 з.п. ф-лы, 2 ил.
1. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб, содержащая:
опорную конструкцию (2), в которой расположена труба (4) запуска робота;
уплотнительный узел, включающий по меньшей мере одно из:
динамического уплотнения (12), закрепленного на входном конце трубы (4) запуска робота, уплотненного на пуповинном кабеле (8);
кольцевого ВОР клапана (3) для ограничения восходящего потока; и
плунжерного ВОР клапана (7) на другом конце трубы (4) для ограничения восходящих потоков, содержащего отверстие, которое является достаточным для обеспечения прохождения робота, уплотняющего на пуповинном кабеле (8).
2. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 1, в которой динамическое уплотнение (12) и клапан (3) могут быть разъединены либо посредством разборки, либо посредством отверстия для введения робота (4) или соединения пуповинного кабеля с роботом (4).
3. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 1, которая содержит два клапана (10, 11), по одному на каждом конце трубы (4), так что труба (4) очищена от кислорода и заполнена инертной текучей средой, причем один клапан (11) для входа и один клапан (10) для выхода очищающей или инертизирующей текучей среды.
4. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 1, в которой обычный клапан (5) приводится в действие после возвращения робота (4) в запускающую трубу (4) и для изоляции данной трубы (4) для безопасного удаления робота (4).
5. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 1, которая включает ответвление (9) с клапаном (6) для направления избыточной текучей среды прямо в горелку.
6. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 5, которая включает наклонное ответвление, так что предусмотрена опора для робота (4) на данном каркасе, чтобы позволять ему перемещаться.
7. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 1, в которой текучая среда вводится в запускающую трубу (4) через клапан (11), когда робот (4) возвращается и пуповинный кабель (8) оттянут назад.
8. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 1, в которой после закрытия клапана (5) растворитель циркулирует в запускающей трубе (4) до тех пор, пока детали робота не станут свободными от нефти.
9. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 1, в которой динамическое уплотнение (12) имеет конфигурацию для использования металлических, керамических или эластомерных уплотнений с или без внутренних стальных структур.
10. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 9, в которой упомянутые металлические, керамические или эластомерные уплотнения выбираются из группы, которая состоит из О-образных, П-образных, квадратных, прямоугольных и манжетных.
11. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 9, в которой используемые уплотнения представляют собой лабиринтные уплотнения и многоступенчатые лабиринтные уплотнения.
12. Система запуска оборудования с кабелем для диагностики и очистки производственных, нагнетательных и распределительных труб по п. 11, в которой геометрия лабиринтного уплотнения выбирается из группы, которая состоит из прямого уплотнения, прямоугольного уплотнения и зубчатого уплотнения.
| US 2016369931 A1, 22.12.2016 | |||
| US 4016621 A, 12.04.1977 | |||
| US 6769152 B1, 03.08.2004 | |||
| US 6428241 B1, 06.08.2002 | |||
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 2013 |
|
RU2524581C1 |
