Изобретение относится к машиностроению, к способам определения жесткости упругих элементов малой жесткости.
Известен способ определения жесткости упругого элемента (см. на стр. 31 рис. 27 в книге: Резников З.М. Прикладная физика: Учебное пособие для учащихся по факультативному курсу: 10 кл. М: Просвещение, 1989, 239 с.), заключающийся в следующем. Берут упругий элемент в виде пружины сжатия, к нему прилагают усилие в осевом направлении. Для определения смещения точки приложения усилия используется реостат, движок реостата связан с точкой приложения усилия к упругому элементу. Изменение длины упругого элемента (т.е. смещение точки приложения усилия к упругому элементу) влечет за собой смещение движка реостата. Зная величину приложенного усилия и величину изменения длины упругого элемента, можно вычислить жесткость упругого элемента.
Совпадающими признаками этого способа и заявляемого способа являются следующие. К упругому элементу прикладывают нагрузку в требуемом направлении. Определяют величину изменения длины упругого элемента при воздействии приложенной нагрузки. Определяют жесткость упругого элемента с использованием величины приложенной нагрузки и величины изменения длины упругого элемента.
Недостатки этого известного способа заключаются в следующем. При движении движка реостата возникают заметные силы трения, поэтому этот способ затруднительно применять при малых значениях прикладываемой нагрузки.
Известен способ, проиллюстрированный на рис. 5.49 на стр. 209 (см. указанный рис. и текст на стр. 206-209 в книге: Вольмир А.С., Григорьев Ю.П., Марьин В.А., Станкевич А.И. Лабораторный практикум по сопротивлению материалов. М.: Изд-во МАИ, 1997, 352 с.). Этот способ принят в качестве прототипа. Этот способ заключается в следующем. Упругий элемент закрепляют на основании. Нагрузку к упругому элементу прикладывают с помощью тросика, перекинутого через блок. Один конец тросика крепится к упругому элементу. На другой конец тросика воздействует вес съемных грузов. Перемещение точки приложения усилия к упругому элементу замеряется индикатором. Зная величину воздействующего усилия и величину перемещения точки приложения усилия к упругому элементу, можно вычислить жесткость упругого элемента. Если приращению усилия АР соответствует приращение перемещения AU, то жесткость С упругого элемента можно вычислить по соотношению:
//Следует заметить, что в указанной выше книге в обозначениях на рис. 5.49 (см. стр. 209) есть опечатки; в частности, можно записать: 5 - трос, 4-блок (на рис. 5.49 эти обозначения перепутаны); кроме того, на рис. 5.49 точка В должна быть указана в точке приложения усилия со стороны троса к упругому элементу - это следует из рис. 5.48а) на стр. 207 указанной книги, а также из текста, напечатанного на стр. 208 (см. пятую строку снизу).//
Совпадающими признаками этого способа и заявляемого способа являются следующие. К упругому элементу прикладывают нагрузку в требуемом направлении. Замеряют величину перемещения точки приложения усилия к упругому элементу. Для создания нагрузки на упругий элемент используют подвешенный груз. Причем нагрузка воздействует на упругий элемент в горизонтальном направлении. Определяют жесткость упругого элемента с использованием величины приложенной нагрузки и величины перемещения точки приложения усилия к упругому элементу.
Недостатки этого способа заключаются в следующем. При малых значениях нагрузки, действующей на упругий элемент, силы трения в системе крепления блока могут быть соизмеримы с прикладываемой нагрузкой, а это, в свою очередь, может вызвать большие погрешности при определении жесткости упругого элемента малой жесткости.
Задача изобретения заключается в том, чтобы обеспечить возможность определения жесткости упругих элементов малой жесткости при малых нагрузках, т.е. обеспечить возможность приложения и замера нагрузок малой величины при определении жесткости упругих элементов малой жесткости.
Эта задача решается тем, что для создания нагрузки малой величины используется груз, подвешенный на длинной тонкой нити (на тонкой проволоке, на тонком тросике). (Этот элемент можно по-разному называть; главное, чтобы он был длинным тонким легким гибким нерастяжимым прочным при его растяжении, при этом, чтобы отсутствовало (электро-магнитное и др.) взаимодействие с окружающими предметами. В дальнейшем в этом описании для обозначения этого элемента, в основном, будет использовано слово тросик.) Этот тросик, в зоне подвески груза, связан с исследуемым упругим элементом, который другим концом укреплен на массивной подвижной опоре. Эта опора перемещается по ровному горизонтальному столу. Поэтапно смещая эту массивную подвижную опору, замеряют величину смещения этой опоры и величину смещения груза, с помощью которого создается нагрузка на упругий элемент. Зная величину смещения груза, его массу и длину тросика, на котором груз подвешен, вычисляют угол отклонения тросика от вертикали и нагрузку, которая действует на упругий элемент.
Технический результат изобретения заключается в обеспечении возможности приложения и замера нагрузок малой величины при определении жесткости упругих элементов малой жесткости.
Нагружение упругого элемента малой жесткости осуществляется путем малого отклонения от вертикали длинного тонкого тросика, на котором подвешен груз. Такое нагружение позволяет прикладывать к упругому элементу малой жесткости нагрузку малой величины. Причем величина этой нагрузки может быть вычислена при замере величины отклонения подвешенного груза от своего равновесного положения. В этом проявляется причинно-следственная связь между задачей изобретения и техническим результатом изобретения.
Берется два куска длинной легкой тонкой нити (тонкой проволоки) жесткой и прочной при ее растяжении, но гибкой при ее изгибе (т.е. тросика) примерно одинаковой длины (например, длина каждого куска тросика 2…3 метра плюс участки для закрепления этого тросика). Снизу к каждому куску тросика прикрепляют груз (например, массой 0,1…0,2 кг). Грузы следует выбирать в виде тела вращения (имеется в виду не только симметрия геометрической формы, но и симметрия в распределении массы). В рабочем состоянии ось симметрии тела вращения направлена вертикально, точка крепления тросика к грузу расположена на оси вращения этого тела вращения, выше центра тяжести груза. Эти грузы лучше изготовлять из немагнитных материалов (чтобы исключить возможность возникновения заметных сил взаимодействия грузов между собой).
В исходном состоянии тросики с подвешенными грузами расположены вертикально. Внизу под грузами располагается в горизонтальной плоскости гладкая, ровная поверхность (например, крышка рабочего стола). Для удобства на поверхности крышки этого стола закреплена миллиметровая бумага, одно из направлений сетки делений этой бумаги направлено параллельно линии, соединяющей точки крепления верхних концов кусков тросика (предполагается, что эти точки крепления верхних концов кусков тросика расположены в одной горизонтальной плоскости). Соответственно другое направление этой сетки делений миллиметровой бумаги направлено параллельно нормали к упомянутой выше линии.
В зоне подвески верхней части второго груза к тросику прикрепляется исследуемый элемент жесткости. Этот элемент жесткости своей второй зоной крепления прикреплен к массивной подвижной опоре. Масса подвешенного груза должна заметно превышать массу других элементов, включая сумму масс тросика и самого элемента жесткости (например, масса груза 100…200 г, а суммарная масса других элементов не превышает 6 г).
//Тросик (нить, проволока) должен быть тонким, из немагнитного материала. Например, медная проволока диаметром 0,3 мм или вольфрамовая нить или тросик, свитый из этих материалов. Тросик (нить, проволока) должен быть гибким, должен иметь малый вес (по сравнению с весом груза, равным, например, 100…200 г); должно быть сведено к минимуму влияние различных факторов: тросик (нить, проволока) должен быть из немагнитного материала, чтобы не возникало заметных сил взаимодействия между двумя рядом расположенными тросиками (нитями, проволоками). В помещении не должно быть сквозняков, которые могут вносить свои возмущения.//
Тросик (нить, проволока) должен быть податливым при изгибе, жестким при растяжении и иметь малую массу.
Для получения оценок о величине массы проволоки, используемой для подвески груза, будем считать, что груз подвешен на тонкой проволоке из меди, плотность которой примем равной ρ≈9 г/см3. В таблице для разных значений длины проволоки и диаметра d проволоки приведены расчетные значения массы m куска проволоки и величина расчетного значения растягивающего напряжения σ в проволоке при нагрузке 1 Н (≈0,1 кгс).
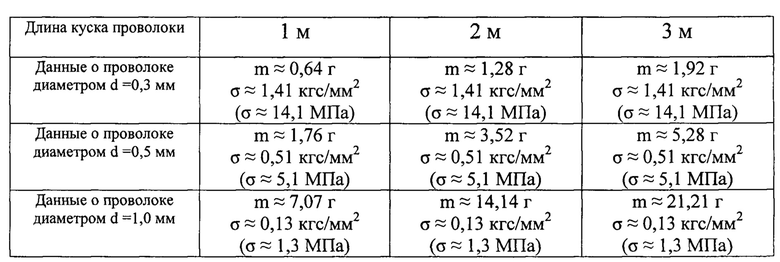
Можно использовать, например, нить из вольфрама; замеры показали, что кусок этой нити диаметром 0,1 мм, длиной 1 м весит примерно 0,15 грамм, при этом разрывная нагрузка составляет примерно 35 Н (3,5 кгс).
Необходимо иметь в виду, что современные искусственные нити могут «электризоваться» под воздействием трения, под воздействием источников электромагнитных возмущений и т.п. «Наэлектризованные» нити могут взаимодействовать между собой и вносить существенные погрешности в результаты измерений. Поэтому, если использовать «нити», то надо экспериментально убедиться, что заметного силового взаимодействия между нитями между собой и другими предметами не наблюдается.
На фиг. 1 проиллюстрирован известный способ определения жесткости упругого элемента.
На фиг. 2 проиллюстрирован предлагаемый способ определения жесткости упругого элемента.
Фиг. 1 - это копия рисунка 5.49 на стр. 209 (в книге: Вольмир А.С., Григорьев Ю.П., Марьин В.А., Станкевич А.И. Лабораторный практикум по сопротивлению материалов. М.: Изд-во МАИ, 1997, 352 с.) с некоторыми изменениями (в частности, убраны номера позиций деталей).
На фиг. 2 обозначены следующие величины.
1 - тросик (нить, проволока), на котором подвешен груз 2, определяющий вертикальное направление и не связанный с упругим элементом.
2 - груз, подвешенный на тросике (нити, проволоке) 1.
3 - тросик (нить, проволока), на котором подвешен груз 4, связанный с упругим элементом 6.
4 - груз, подвешенный на тросике (нити, проволоке) 3.
5 - вертикальная линия, вдоль которой должен располагаться тросик (нить, проволока) 3 с подвешенным грузом 4, когда усилие со стороны упругого элемента 6 равно нулю.
6 - исследуемый упругий элемент малой жесткости; для удобства изображения на фиг. 2 изображен упругий элемент в виде эллипса («эллипс», например, сделан из тонкой пружинной проволоки, или вместо проволоки используется длинная пружинка, изогнутая так, что образует круг или эллипс и т.п.). Фактически упругий элемент 6 может иметь другую форму.
7 - массивный подвижный упор. К этому упору в точке D крепится упругий элемент 6. Упор 7 располагается на ровном горизонтальном столе и может перемещаться по столу вдоль оси X (см. фиг. 2), для этого на упоре 7 смонтированы роликовые опоры (или колесики) 8 и 9.
8 и 9 - роликовые опоры (или колесики), обеспечивающие возможность плавного смещения массивного подвижного упора 7.
Грузы 2 и 4 следует брать осесимметричные и подвешивать их так, чтобы не нарушать симметрию.
Точки А и В - это точки крепления тросиков (нитей, проволок) 1 и 3.
Точка С - это точка крепления упругого элемента 6 к тросику 3, на котором висит груз 4.
Точка D - это точка крепления упругого элемента 6 к массивному подвижному упору 7.
Введем обозначения:
m - масса груза 4.
g≈9,81 м/с2 - ускорение свободного падения.
Bo - расстояние между точками крепления верхних концов кусков тросика, на которых подвешиваются грузы 2 и 4.
Lo - длина куска тросика, измеряемая от точки закрепления верхней концевой части до точки соединения с исследуемым элементом жесткости (длина участка тросика между точкой В и точкой С, см. фиг. 2).
X*=0 - координата, характеризующая начальное положение груза 2.
X1 - координата, характеризующая начальное положение груза 4.
Х2 - координата, характеризующая положение груза 4 при смещении упора, на котором закреплен элемент жесткости 6.
Х3 - координата, характеризующая начальное положение массивного упора 7.
Х4 - координата, характеризующая положение массивного упора 7 при его смещении (в начальный момент, когда тросик 3 располагается вертикально, выполняются условия Х2=X1; Х4=Х3).
Изобретение реализуется следующим образом.
Закрепляют элемент жесткости 6. Смещая упор 7 вдоль оси X, добиваются, чтобы выполнялось условие
этому условию соответствует вертикальное положение тросика 3.
Замеряют величины Х1, Х3.
Затем смещают массивный упор 7 вдоль оси X и замеряют величины Х2 и Х4 (характеризующие положение груза 4 и массивного упора 7 после смещения массивного упора 7).
Вычисляют величину, характеризующую деформацию элемента жесткости 6 (т.е. величину, равную величине изменения длины элемента жесткости 6 в данном направлении):

Вычисляют величину, характеризующую смещение груза 4:
На фиг. 2 упругий элемент малой жесткости показан условно в виде эллипса из тонкой проволоки.
Упругий элемент малой жесткости может заметно прогибаться под действием собственного веса. Чтобы уменьшить этот эффект, упругий элемент при определении его жесткости может быть подвешен на длинных тонких тросиках (нитях, проволоках), расположенных вертикально (или почти вертикально). Учитывая, что вес упругого элемента и кусков тросика (нитей, проволок), на которых его подвешивают, мал по сравнению с весом груза 4 (см. фиг. 2), наличие кусков тросика (проволок, нитей) для подвески упругого элемента 6 внесет незначительные погрешности при определении искомой жесткости. (На фиг. 2 куски тросика (нити, проволоки), на которых подвешен упругий элемент 6, не показаны.) Или можно упругий элемент расположить на плавающих (например, на поверхности воды) подставках. Эти плавающие подставки на фиг. 2 не показаны.
Таким образом, для создания нагрузки малой величины используют груз, подвешенный на длинном тонком тросике, этот тросик, в зоне подвески груза, связан с упругим элементом, который другим концом укреплен на массивной подвижной опоре. Причем эта опора перемещается по ровному горизонтальному столу; поэтапно смещая эту массивную подвижную опору, замеряют величину смещения этой опоры и величину смещения груза, с помощью которого создается нагрузка на упругий элемент. При этом, зная величину смещения груза ΔU, его массу т, длину тросика L0, на котором груз «подвешен», величину изменения длины упругого элемента ΔХ, вычисляют угол Δϕ отклонения тросика (нити, проволоки) от вертикали, приращение нагрузки ΔР, которая воздействует на упругий элемент, и жесткость упругого элемента С по формулам:

где g≈9,81 м/с2 - ускорение свободного падения, m - масса груза в кг. Если ΔU, Lo, ΔХ заданы в метрах, то жесткость С будет иметь размерность Н/м. (Напомним, что Lo - это расстояние между точками В и С, см. фиг. 2; а угол Δϕ в данном случае измеряется в радианах, предполагается, что этот угол мал).
Для удобства при проведении расчетов предполагается, что тонкие тросики 1 и 3 и точки С и D (точки крепления упругого элемента 6) в исходном положении и после нагружения упругого элемента 6 располагаются в одной вертикальной плоскости. При выводе указанных выше расчетных формул предполагалось, что тросик 3 отклоняется от вертикали на угол малой величины (например, этот угол меньше 10°). Если требуется определить жесткость не только при отклонении груза 4 от «нулевого» положения, но и при отклонении груза 4 от предыдущего положения (так называемая касательная жесткость), то следует вычислить соответствующие изменения нагрузки ΔР и длины упругого элемента ΔX.
//В данном случае слова «изменение длины упругого элемента ΔX» означают изменение расстояния, измеряемого вдоль оси X (см. фиг. 2), между точками С и D.//
Упругий элемент 6 может не только «растягиваться», но и «сжиматься» (при испытаниях груз 4 будет приближаться к грузу 2; в частности, учитывая это, выше записано, что ΔU=|Х2 - X1|).
Изобретение относится к машиностроению, к способам определения жесткости упругих элементов малой жесткости. К упругому элементу прикладывают нагрузку, замеряют величину перемещения точки приложения нагрузки к упругому элементу, для создания нагрузки используют подвешенный груз, нагрузка воздействует на упругий элемент в горизонтальном направлении, тросик, на котором подвешен первый груз, определяющий вертикальное направление, не связан с упругим элементом, создают нагрузку малой величины вторым грузом, подвешенным на втором тросике, связанном с упругим элементом. При этом масса подвешенного второго груза должна заметно превышать сумму масс второго тросика и самого упругого элемента. Упругий элемент прикрепляют одним концом ко второму тросику в зоне подвески верхней части второго груза, другим концом крепят на массивной подвижной опоре, поэтапно смещая ее, замеряют величину смещения опоры, замеряют величину смещения второго груза. Зная величину смещения второго груза ΔU, его массу m, длину второго тросика Lo, величину изменения длины упругого элемента ΔХ, вычисляют угол Δϕ отклонения второго тросика от вертикали, приращение нагрузки ΔР, и жесткость исследуемого упругого элемента С. 2 ил.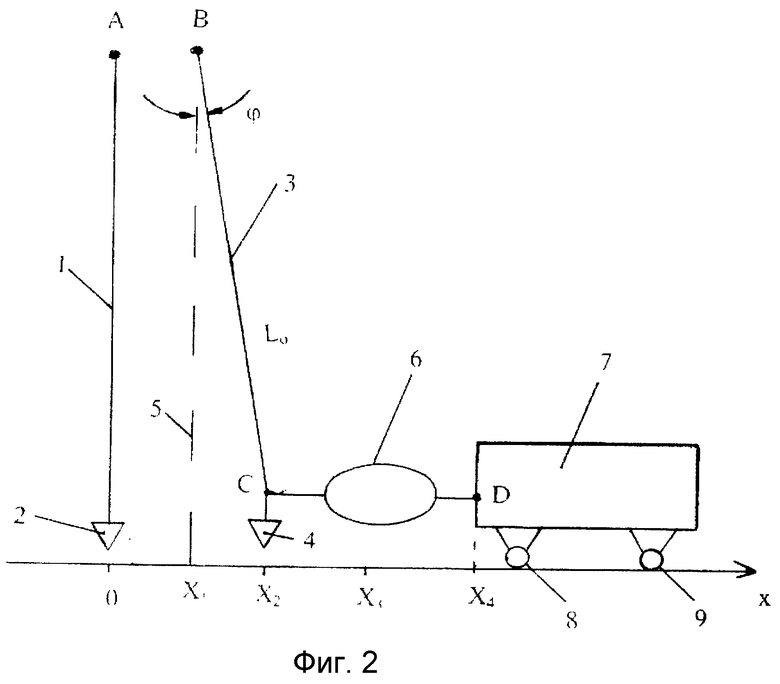
Способ определения жесткости упругого элемента малой жесткости, заключающийся в том, что к упругому элементу в требуемой точке прикладывают нагрузку в требуемом направлении, замеряют величину перемещения точки приложения нагрузки к упругому элементу, при этом для создания нагрузки на упругий элемент используют подвешенный груз, причем нагрузка воздействует на упругий элемент в горизонтальном направлении, отличающийся тем, что первый тросик, на котором подвешен первый груз, определяет вертикальное направление и не связан с упругим элементом, далее создают нагрузку малой величины, используя для создания нагрузки малой величины второй груз, подвешенный на втором тросике, связанном с упругим элементом, причем оба тросика выполняют длинными, гибкими, тонкими, легкими, прочными, а оба груза выполняют осесимметричными в виде тел вращения из немагнитных материалов, при этом масса подвешенного второго груза должна заметно превышать сумму масс второго тросика и самого упругого элемента, упругий элемент прикрепляют одним концом ко второму тросику в зоне подвески верхней части второго груза, а другим концом крепят на массивной подвижной опоре, причем эта опора перемещается по ровному горизонтальному столу, причем, поэтапно смещая эту массивную подвижную опору, замеряют величину смещения этой опоры и замеряют величину смещения второго груза, с помощью которого создается нагрузка на исследуемый упругий элемент, при этом, зная величину смещения второго груза ΔU, его массу m, длину второго тросика Lo, на котором груз подвешен, величину изменения длины упругого элемента ΔХ, вычисляют угол Δϕ отклонения второго тросика от вертикали, приращение нагрузки ΔР, которая воздействует на исследуемый упругий элемент, и жесткость исследуемого упругого элемента С по формулам:

где g≈9,81 м/с2 - ускорение свободного падения.
| Вольмир А.С., Григорьев Ю.П., Марьин В.А., Станкевич А.И | |||
| Лабораторный практикум по сопротивлению материалов | |||
| М.: Изд-во МАИ, 1997, 352 с., с.206-209) | |||
| Способ защиты от перегрузки недопустимым уровнем передачи и сигнализации о предельном уровне на входе необслуживаемых усилительных станций высокочастотной многоканальной связи | 1948 |
|
SU74606A1 |
| Серков Александр Сергеевич ВЛИЯНИЕ ОТКЛОНЕНИЙ ФОРМЫ БАЗОВЫХ ПОВЕРХНОСТЕЙ НА УПРУГИЕ ДЕФОРМАЦИИ ЗАГОТОВОК МАЛОЙ ЖЁСТКОСТИ // Известия ТулГУ | |||
| Технические науки | |||
| Электромагнитный прерыватель | 1924 |
|
SU2023A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
