Настоящее изобретение относится к медицине, а именно к неврологии, и может быть использовано для эффективного восстановления двигательных и когнитивных функций при реабилитации пациентов с тяжелым повреждением головного и спинного мозга, и как следствие, низким реабилитационным потенциалом.
Актуальность решаемой посредством предложенного способа проблемы связана со сложностью в реабилитации пациентов с низким реабилитационным потенциалом, перенесших повреждения головного или спинного мозга. При длительной иммобилизации (например, после инсульта, черепно-мозговой или спинальной травмы) у человека происходят нарушения сенсорного обеспечения движения, что клинически выражается последующим развитием нарушений позы и локомоции. Двигательные нарушения различной степени выраженности возникают более, чем у 80% выживших после различных поражений центральной нервной системы (ЦНТ) и спинного мозга, и являются одной из главных причин инвалидности. Большинство пострадавших от черепно-мозговой травмы (ЧМТ) и позвоночно-спинномозговой травмы люди работоспособного возраста - мужчины до 40 лет, наиболее активная часть населения России. Основной причиной инвалидности в этом случае являются выраженные моторные расстройства: парезы, низкий или, наоборот, высокий мышечный тонус, приводящий к деформации конечностей, боли, нарушения активной или пассивной функции использования конечностей в быту и т.д. (С.С. Петриков и др., 2019). Растут актуальность и ценность использования максимально эффективных современных методов реабилитации для наиболее полноценного и быстрого восстановления таких пациентов. Появляющиеся результаты современных исследований позволяют сделать вывод о целесообразности использования виртуальной реальности (BP) для реабилитации утраченных функций после ЧМТ, позвоночно-спинномозговой травмы. I. Dimbwadyo-Terrer с соавт. изучали эффективность ВР-системы Toyra (Испания) при восстановлении верхней конечности у людей с тетраплегией, сформировавшейся после травмы спинного мозга. Несмотря на отсутствие статистически значимых различий в результатах реабилитации этих пациентов с группой контроля, проходившей традиционный комплекс восстановительного лечения, они были более мотивированы и выражали желание и в дальнейшем продолжать использование системы Тоуrа.
Положительную динамику при использовании BP-технологий у пациентов после спинальной травмы отмечали и другие исследователи. Так, при изучении эффекта BP на улучшение способности к вождению автомобиля у пациентов с позвоночно-спинномозговой травмой было показано, что реабилитация навыков вождения в условиях BP даже при тяжелых последствиях спинальной травмы дает существенный прогресс [Sung W.H., 2012].
Внедрение ВР-технологий в комплекс восстановительных мероприятий пациентов с утратой функции ходьбы в результате травм головного мозга является очень важным фактором в процессе восстановления двигательных навыков. Традиционные подходы в подобных случаях не способны полностью решить задачу задействования процессов нейропластичности, в то время как реабилитационные методы с использованием BP, обеспечивающие обратную связь, могут эти процессы улучшить. Иллюзия движения, создаваемая посредством BP, активирует моторную зону контралатерального полушария так же интенсивно, как и произвольное. Кроме того, в процесс движения в BP, помимо моторной коры вовлекаются мозжечок, подкорковые ядра, теменная доля, круговая извилина. Данные подтверждены электроэнцефалограммой (ЭЭГ) - во время произвольных и воображаемых движений происходит десинхронизация μ-ритма (10-12 Гц), т.е. можно наблюдать активацию мозга пациентов на фоне реабилитационных мероприятий с применением BP [Neuper C, 2009].
Из уровня техники известны различные способы реабилитации пациентов с использованием виртуальной реальности.
Например, известен способ реабилитации больных в острой стадии инсульта с использованием биологической обратной связи и виртуальной реальности по патенту на изобретение РФ №2432971 с приоритетом от 02.04.2010 г., опубл. 10.11.2011 г., где используют биологическую обратную связь (БОС) и виртуальную реальность, для чего проводят установку очков и шлема виртуальной реальности на голову пациента, установку датчиков движения на голову, туловище и тазовую область пациента, загрузку программного обеспечения, состоящего из виртуальной среды и элементов управления, и направленную тренировку координированных движений головы, туловища и тазовой области посредством среды виртуальной реальности и датчиков движения. В качестве виртуальной среды применяется подводный мир, виртуальный объект управления - дельфин. Чувствительность и симметричность управляющих движений регулируется в зависимости от состояния пациента и его способности к движениям. БОС осуществляют посредством зрительного канала в ассоциированном (глазами дельфина) и диссоциированном (глазами внешнего наблюдателя за его действиями) состоянии. Способ обеспечивает восстановление контроля базовых произвольных движений туловища, головы и шеи у этой группы пациентов.
Данный способ направлен на восстановление контроля базовых произвольных движений туловища, головы и шеи, а не конечностей, не обеспечивает восстановление движение рук, ног и не дает пациенту ощущения прямохождения. При этом пациент не может воздействовать на объекты виртуальной реальности, а только может их видеть. Кроме того, известный способ не позволяет пациенту использовать биологическую обратную связь от первого лица.
Частично, указанные недостатки устранены в известном способе реабилитации больных с двигательными нарушениями функций конечностей с использованием виртуальной реальности по патенту на изобретение РФ №2655200, с приоритетом от 29.12.2016 г., опубл. 24.05.2018 г., включающим использование виртуальной среды с элементами управления и сенсорное взаимодействие с виртуальным объектом, при этом с учетом полученной с регистрирующих электроэнцефалографических и электромиографических датчиков информации, установленных на голове и пораженной конечности соответственно, а также способности пациента к движениям, регулируют объем управляющих виртуальных движений таким образом, что дает ощущение завершенности выполняемого движения при демонстрации заданий виртуальной реальности, причем сенсорное взаимодействие с виртуальными объектами посредством использования зрительного, слухового канала, а также тактильной и проприорецептивной стимуляции рецепторов конечности проводят таким образом, чтобы обеспечить ассоциирование пациента с виртуальным аватаром, с очувствлением тактильного и проприоцептивного контакта с виртуальными объектами и ощущением завершенности выполняемого движения.
При этом в известном способе тактильную стимуляцию рецепторов конечностей проводят посредством установки в проекции подошвенных поверхностей стоп четырех пневмоманжет на каждую подошвенную поверхность. Причем каждый виртуальный шаг пациента синхронизирован с последовательным раздуванием пневмоманжеток той же стороны, что дает пациенту тактильное ощущение контакта с виртуальной дорожкой для перемещения. С целью проприорецептивной стимуляции рецепторов конечности пациенту предлагается представлять движение парализованной конечности, а именно совершать намерение совершать шаг или на выбор выбирать направление движения по прогулочным дорожкам виртуальной парковой зоны. Данное намерение сопряжено с подачей звукового сигнала, с целью точной временной фиксации начала планирования.
Известный способ реабилитации больных, согласно утверждению авторов, позволяет обеспечить восстановление функций ходьбы пациентов на фоне поражения центральной или периферической нервной системы.
Указанное техническое решение имеет ряд недостатков.
Так, пневмоманжеты в результате механического давления обжатием на конечность создают раздражение рецепторов как на опорной поверхности, так и на тыле стопы, который, по сути, не имеет никакого отношения к организации реакции опоры и формирования рефлекторной дуги, лежащей в основе управления локомоциями. Таким образом, обжатие приводит к созданию нефизиологичного, ненужного механического давления на конечность и никак не может формировать физиологическую реакцию цикла шага. При этом необходимо отметить, что имитация физиологического цикла шага не может формироваться только лишь посредством последовательного стимулирующего воздействия различные зоны левой и правой стопы, поскольку цикл шага представляет собой сложную программу, включающую в себя такие временные характеристики шага, как длительность цикла, опорной, переносной и двуопорной фаз, интервалы опоры на пятку, на всю стопу и носок.
При этом использование в известном способе с целью проприорецептивной стимуляции рецепторов конечности пациенту виртуального контента, основанного на воображении движения, имеет ряд ограничений, связанных с интеллектуально-мнестическими расстройствами пациентов. Дело в том, что физиологические механизмы, лежащие в основе процесса воображения движения, во многом сходны с механизмами двигательного контроля, что можно использовать для реабилитации пациентов с двигательными нарушениями. При этом необходимо разделять визуальное и кинестетическое воображение движений. В первом случае человек представляет зрительный образ собственного движения, рассматривая его как бы от третьего лица. Во втором случае он создает кинестетическое ощущение движения, т.е. представляет его, а не рассматривает. Но, несмотря на данные в пользу сохранности после инсульта функции воображения движения, интенсивность ощущения и временная связь при этом как правило нарушены, у пациентов возникает так называемое хаотичное воображение движения. В связи с этим кинестетические тренировки воображения могут быть использованы только у пациентов с сохранным интеллектуально-мнестическим уровнем и/или высоким реабилитационным потенциалом для обучения или более правильному планированию движения и повышению точности его выполнения.
Кроме того, для осуществления способа по патенту РФ №2655200 необходимо использовать дополнительное достаточно сложное оборудование, например ЭЭГ, что существенно усложняет и удлиняет время проведения процедуры.
Из уровня техники также известны различные способы реабилитации больных с нейрокогнитивными расстройствами с использованием виртуальной реальности, включающие моделирование в виртуальной среде различных ситуаций, требующих от пациента принятия решений по выходу из них.
В частности, способ реабилитации по патенту на изобретение РФ №2654767 (приоритет от 02.12.2016 г., опубл. 22.05.2018 г.) предусматривает предъявление пациенту на фоне виртуальной среды с целью отработки когнитивных навыков теста «Внимание», в процессе которого пациент должен нажимать на кнопку мыши, как только замечает появление решетки, и отпускать, как только решетка исчезает. Данный способ реабилитации обеспечивает перестройку работы зрительной системы и включения тех временных и пространственно-частотных каналов зрительного анализатора, которые обеспечивают стимуляцию адаптивных возможностей мозга, связанных с когнитивными функциями.
Из патента на изобретение РФ №2704236 (приоритет от 01.08.2019 г., опубл. 24.10.2019 г.) известен способ развития уровня когнитивно-моторных способностей человека с использованием виртуальной реальности, включающий предъявление пациенту на фоне виртуальной среды с целью отработки когнитивных навыков тестов «Скорость реакции» и «Двигательная реакция». При этом в процессе прохождения тестов пациенту нужно вставить руку в указанное условной подсветкой программно-аппаратного комплекса виртуальное отверстие, не задевая его краев, и/или переложить выбранный для теста или упражнения предмет из одной руки в другую через соседние указанные иной оговоренной подсветкой отверстия в виртуальной стене. Известное решение обеспечивает повышение эффективности развития уровня когнитивно-моторных способностей человека, связанных с манипулятивной функцией рук.
В патенте на изобретение США №10111603 (приоритет от 13.01.2015 г., опубл. 16.07.2015 г. раскрыт способ для физической, преддействующей, конечностной, и связанной с ними спинной, стволовой и нейронной терапии, с использованием виртуальной реальности. Согласно данному способу пациенту на фоне виртуальной среды с целью отработки когнитивных навыков предъявляется тест «Зрительная память». В качестве такого теста предлагается головоломка, в которой курсор используется для перемещения некоторого количества частей головоломки, чтобы собрать, например, изображение руки в любой ориентации, положении и конфигурации, которое может быть разобрано действием головоломки на части, которые должны быть повторно по памяти собраны пациентом.
К общему недостатку известных способов реабилитации по патентам РФ №2654767, РФ №2704236 и США №10111603 можно отнести их недостаточную эффективность в реабилитационном процессе, что связано с незадействованными в процессе тренировки одновременно обоими полушариями головного мозга - непораженным и пораженным.
Самым близким по своей технической сущности из выявленных источников информации является упомянутое выше техническое решение, раскрытое в патенте РФ №2655200.
Задачей настоящего изобретения является создание эффективного комплексного способа лечения нарушений двигательных и когнитивных функций у пациентов с тяжелым повреждением головного и спинного мозга, с использованием виртуальной реальности.
Поставленная задача решается за счет того, что способ реабилитации пациентов при повреждении головного и спинного мозга с использованием виртуальной реальности и биологической обратной связи включает использование виртуальной среды с элементами управления и сенсорное взаимодействие с виртуальными объектами интегрированного в виртуальную среду пациента посредством использования по меньшей мере зрительного канала и тактильной стимуляции в виде пневмомеханического стимулирующего воздействия на рецепторы нижних конечностей, при этом согласно изобретению, виртуальным объектом сенсорного взаимодействия с пациентом является парящая на высоте дорожка для ходьбы, отрезки которой имеют разную ширину и меняются рандомно, причем пневмомеханическое стимулирующее воздействие оказывают на опорные рецепторы пяточной зоны стоп и опорные рецепторы плюсневой зоны стоп в скоростных режимах ходьбы, с воспроизведением цикла шага человека, при этом скорость оптического потока, создаваемого в виртуальной среде, синхронизирована со скоростью стимуляции опорных рецепторов стоп.
Использование в качестве виртуального объекта сенсорного взаимодействия с пациентом виртуальной дорожки для ходьбы, парящей на высоте, отрезки которой имеют разную ширину и меняются рандомно, - обеспечивает обратную биологическую связь, тренирующую у пациента удержание позы и баланс.
Пневмомеханическое стимулирующее воздействие на опорные рецепторы пяточной зоны стоп и опорные рецепторы плюсневой зоны стоп в скоростных режимах ходьбы, с воспроизведением цикла шага человека, с синхронизацией скорости оптического потока, создаваемого в виртуальной среде, со скоростью стимуляции опорных рецепторов, - позволяет моделировать сенсорный образ шага в режиме физиологической, закрепленной в эволюции циклограммы ходьбы и активизировать моторные центры спинальной и более высокой организации, в том числе в первичной сенсомоторной коре и в дополнительной двигательной области еще на стадии постельной иммобилизации пациентов. При этом виртуальный контент сам по себе формирует направление движения, правильный моторный шаговый стереотип, и тем самым существенно расширяет категорию пациентов для реабилитации и может быть использован у пациентов с низким реабилитационным потенциалом.
В качестве дополнительных виртуальных объектов сенсорного взаимодействия с пациентом предусмотрены предъявляемые в определенной последовательности на фоне виртуальной дорожки для ходьбы когнитивные тесты «Внимание», «Скорость реакции», «Двигательная реакция, «Зрительная память». Такое включение когнитивной стимуляции на фоне ходьбы запускает процесс активизации разных сенсорных стимулов, синхронизованных в едином пространстве. Это приводит к реорганизации коры головного мозга с последующим восстановлением координации движений, что связано с развитием новых функциональных связей в головном мозге, способствующих восстановлению нарушенного моторного стереотипа.
При этом в процессе прохождения теста «Внимание» пациенту необходимо с помощью элементов управления выбрать цифры по возрастанию.
В процессе прохождения когнитивного теста «Скорость реакции» пациенту предлагается с помощью элементов управления как можно быстрее найти кубик, аналогичный центральному и выстрелить в него.
В процессе прохождения когнитивного теста «Двигательная реакция» пациенту нужно с помощью элементов управления вставить руку в указанное условной подсветкой программно-аппаратного комплекса виртуальное отверстие, не задевая его краев, и/или переложить выбранный для теста или упражнения предмет из одной руки в другую через соседние указанные иной оговоренной подсветкой отверстия в виртуальной стене.
В процессе прохождения когнитивного теста «Зрительная память» пациенту необходимо запомнить, где располагаются парные картинки, после чего, картинки закрываются, а пациенту необходимо с помощью элементов управления по памяти открыть парные картинки, стреляя по кубикам, при этом упражнение выполняют с начала здоровой / менее поврежденной рукой, а затем поврежденной.
Изобретение поясняется чертежами, где:
- На Фиг. 1 - представлена функциональная блок-схема аппаратно-программного комплекса для реализации заявленного способа реабилитации двигательных и когнитивных функций у пациентов при повреждении головного и/или спинного мозга;
- На Фиг. 2 - изображена циклограмма шага обычной ходьбы;
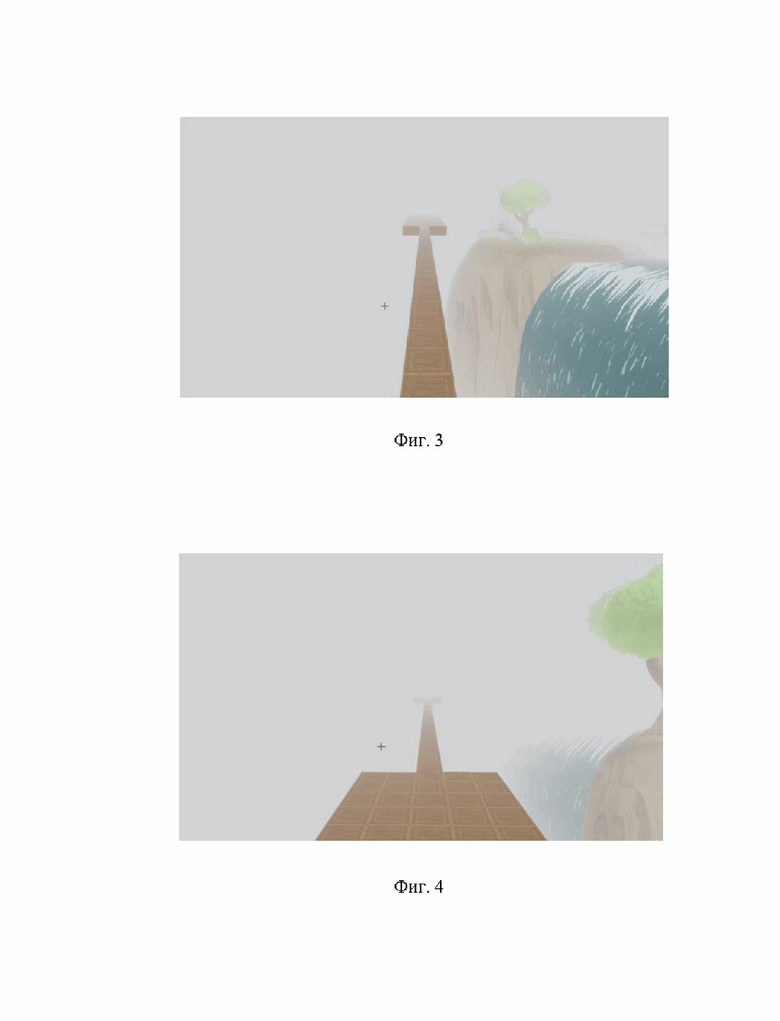
- На Фиг. 3, 4 - проиллюстрирован виртуальный контент в виде парящей на высоте виртуальной дорожки, изменяющейся рандомно по ширине, в рамках базовой терапевтической программы «Ходьба»;
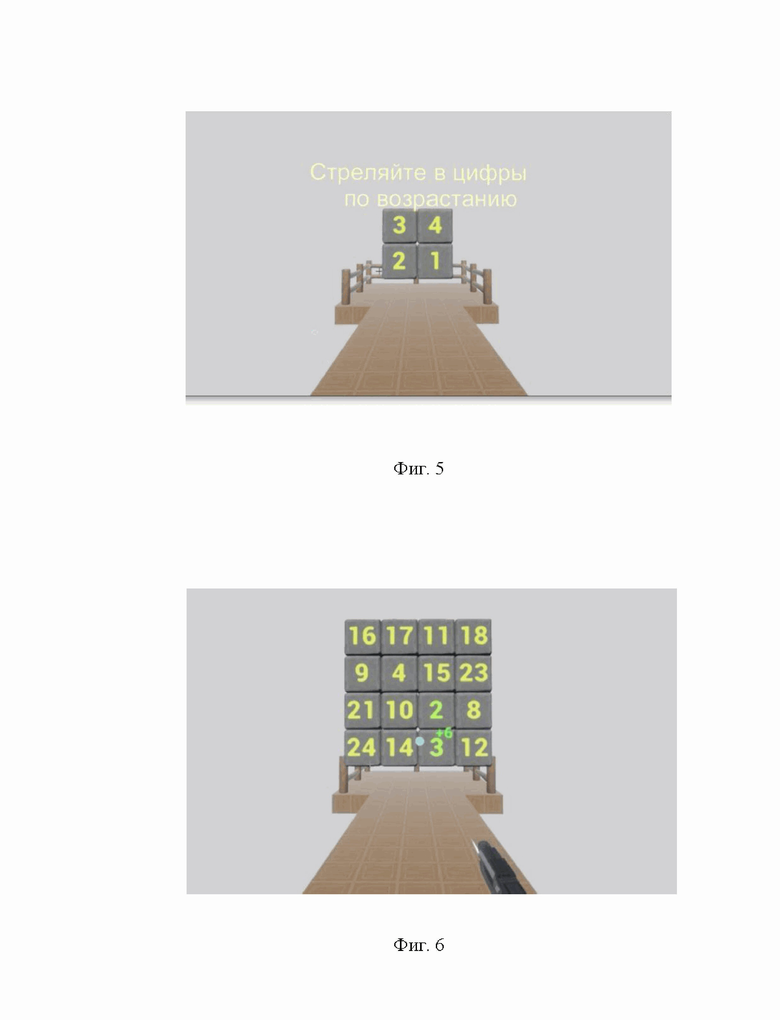
- На Фиг. 5, 6 - проиллюстрирован виртуальный контент в виде парящей на высоте виртуальной дорожки с графическими элементами для отработки теста «Внимание»;
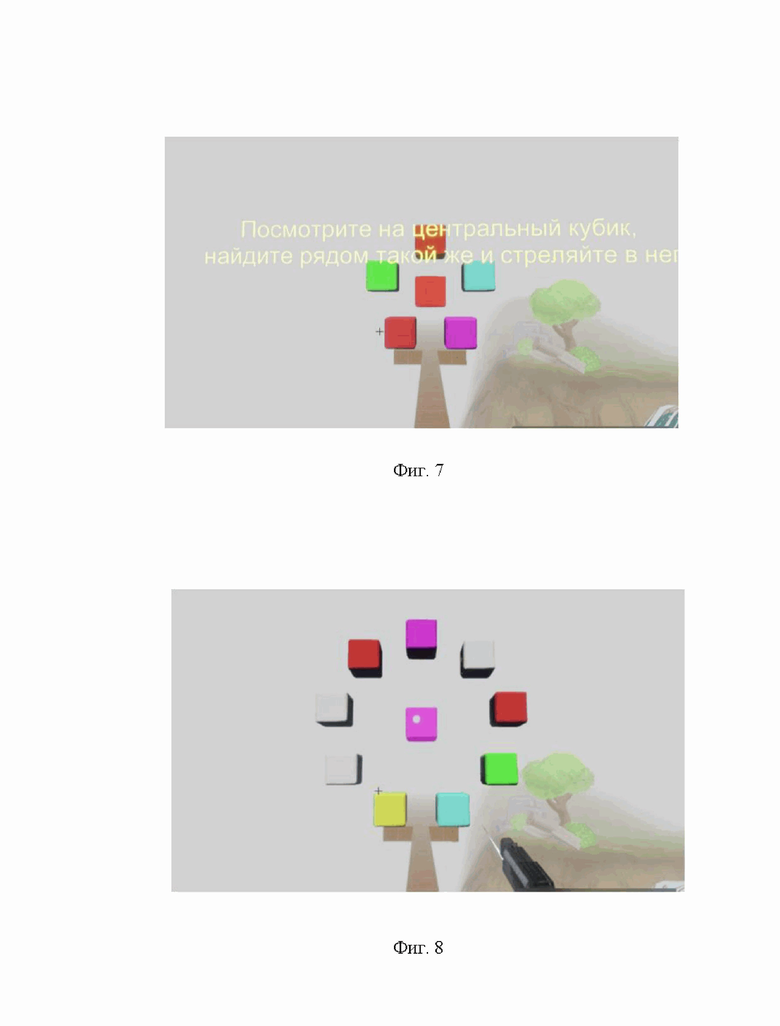
- На Фиг. 7, 8 - проиллюстрирован виртуальный контент в виде парящей на высоте виртуальной дорожки с графическими элементами для отработки теста «Скорость реакции»;
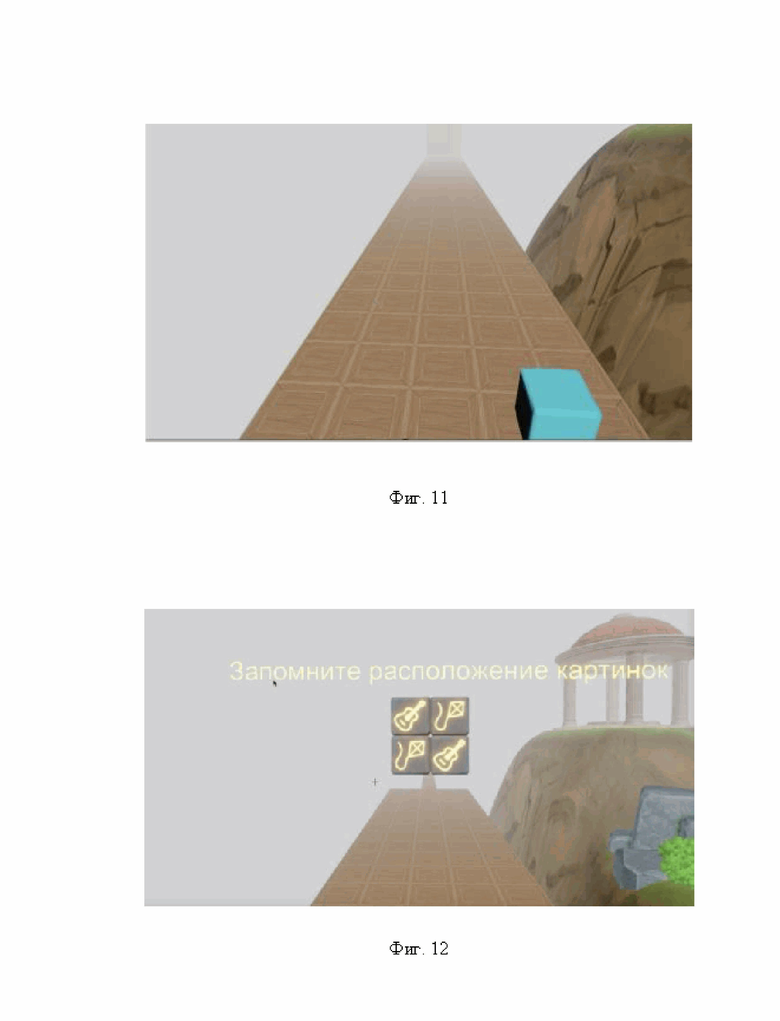
- На Фиг. 9-11 - проиллюстрирован виртуальный контент в виде парящей на высоте виртуальной дорожки с графическими элементами для отработки теста «Двигательная реакция»;
- На Фиг. 12-13 - проиллюстрирован виртуальный контент в виде парящей на высоте виртуальной дорожки с графическими элементами для отработки теста «Зрительная память».
Способ реализуется следующим образом.
В основе метода лежит комплексная терапия с применением реабилитационного программно-аппаратного комплекса, включающая базовую программу «Ходьба», длительностью не более 3 минут, и конечную программу, включающую в себя 5 когнитивных тестов, общей продолжительностью до 20 минут.
Реабилитационный программно-аппаратный комплекс для реализации заявленного способа (Фиг. 1) содержит управляющий блок (портативный) с программным обеспечением (9), микропроцессорный блок с сенсорным экраном (1), модуль поддержки беспроводной связи (8), модуль питания микропроцессорного блока (2), компрессор (3), регулирующий клапан (4), датчик давления (5), ресивер (6), аварийный клапан (7), блок виртуальной реальности (10), правый (11) и левый (12) ортезы (см. Фиг. 3), со встроенными в стельку правого ортеза (11) пневмокамерами №1, №2 с клапанами Кл1, Кл2, и в стельку левого ортеза (12) - пневмокамерами №3, №4 с клапанами Кл3, Кл4. При этом пневмокамеры №1, №3 оказывают стимулирующее воздействие на опорные рецепторы пяточной зоны стопы (пятка), а пневмокамеры №2, №4 - на опорные рецепторы плюсневой зоны стопы (носок). Микропроцессорный блок (1) и блок виртуальной реальности (10) при помощи управляющего блока (9) через модуль поддержки беспроводной связи (8) подключены в единую систему.
Во время проведения процедуры пациент может находиться в горизонтальном положении, на спине, со слегка приподнятым изголовьем, ноги должны быть выпрямлены (допускается положение ног в легком упоре, например в спинку кровати, для предотвращения ротации стоп), сидя в коляске, сидя на стуле с согнутыми ногами в коленных и тазобедренных суставах под 90 град. Обычно процедуры проводят в палате, но при желании их можно проводить в отдельно оборудованном помещении. Занятия рекомендуется начинать не ранее, чем через час после еды.
Пациенту производится установка на голову шлема, либо очков виртуальной реальности (блок виртуальной реальности (10)). Шлем подгоняется и фиксируется с помощью регуляторов, вначале задних, а затем верхних. Затем на стопы пациента одеваются ортезы (11), (12) соответствующего типоразмера, с вложенными в них пневмостельками, и плотно фиксируется с помощью ремней. Затем на панели управления управляющего блока (9) выбирается компьютерная программа воздействия на пациента в данном сеансе: время воздействия, виртуальный контент (например, уходящая вдаль виртуальная дорожка, которая произвольно меняет в ходе движения свою ширину). После запуска выбранной компьютерной программы управляющий блок (9) через модуль поддержки беспроводной связи (8) (например, через Wi-Fi) подает сигнал в блок виртуальной реальности (10) на визуализацию пациенту виртуального контента (например, виртуальной дорожки для ходьбы) и одновременно, через модуль поддержки беспроводной связи (8) подает сигнал модулю питания (2) на включение компрессора (3) и ресивера (6). От блока виртуальной реальности (10) через модуль поддержки беспроводной связи (8) подается сигнал на микропроцессорный блок (1). На сенсорном экране блока (1) в зависимости от виртуального контента задаются скорость оптического потока в виртуальной среде и временные параметры физиологического цикла шага (опорная и переносная фазы, интервалы опоры на пятку и носок) в диапазоне скорости ходьбы от 1 км/ч до 9 км/ч, при давлении в пневмокамерах №1-№4 - от 10 кПа до 70 кПА.
Одновременно с началом воспроизведения виртуального контента, из ресивера (6) с помощью клапанов Кл1÷Кл4, работающих в режиме подача/стравливание воздуха через пневмопровод, осуществляется подача воздуха в пневмокамеры №1÷№4 стелек ортезов (11), (12). Управление клапанами Кл1÷Кл4 осуществляется микропроцессорным блоком (1) согласно циклограмме, приведенной на Фиг. 2, в следующей последовательности:
1. Раздувается пневмокамера №2, что соответствует началу фазы опоры на правый носок.
2. Раздувается пневмокамера №3, что соответствует началу двуопорной фазы опоры на левую пятку и правый носок.
3. Сжимается пневмокамера №2, что соответствует завершению фазы опоры на правый носок и началу фазы переноса правой ноги.
4. Сжимается пневмокамера №3, что соответствует завершению фазы опоры на левую пятку и началу фазы переката левой ноги.
5. Раздувается пневмокамера №4, что соответствует завершению фазы переката левой ноги и началу фазы опоры на левый носок.
6. Раздувается пневмокамера №1, что соответствует началу двуопорной фазы опоры на левый носок и правую пятку.
7. Сжимается пневмокамера №4, что соответствует завершению фазы опоры на левый носок и началу фазы переноса левой ноги.
8. Сжимается пневмокамера №1, что соответствует завершению фазы опоры на правую пятку и началу фазы переката правой ноги.
На этом цикл управления клапанами пневмокамер, соответствующий одному шагу ходьбы, завершается, либо повторяется в зависимости от выбранной посредством панели управления блока (9) программы воздействия на пациента.
Давление в ресивере поддерживается системой автоматического управления следующим образом: давление в ресивере измеряется с помощью датчика давления (5) и передается в микропроцессорный блок с сенсорным экраном (1), где переводится в цифровую форму и сравнивается с заданным значением.
Ортезы со стельками с пневмокамерами изготавливаются из экокожи. Эргономически они соответствуют обычной обуви, что создает у пациента привычные ощущения обычной повседневной обуви и тем самым усиливает эффект иллюзии ходьбы во время стимуляции. Выполнение в каждом ортезе закрепленной мягкой подстраивающейся под стопу пациента стельки со встроенными в нее двумя пневмокамерами позволяет более точно стимулировать зоны максимального скопления опорных рецепторов - пятка и плюсна, большой палец стопы.
На первоначальном этапе терапии посредством панели управления блока (9) запускается базовая программа «Ходьба», обеспечивающая пациента обратной связью в виде виртуальной дорожки, парящей на высоте (эффект «канатоходца») и уходящей в даль (см. Фиг. 3), которая произвольно (рандомно) меняет в ходе движения свою ширину (см. Фиг. 4), тем самым тренируя удержания позы и баланс. Объектом управления, соответственно, являются виртуальные нижние конечности пациента. Если в ходе движения пациент условно «падает» с дорожки, происходит автоматический перезапуск программы с того места, где была прервана тренировочная сессия, при этом программно рандомное изменение ширины дорожки подстраивается под текущие возможности пациента и усложняется по мере успешного выполнения задания.
При адекватной адаптации и переносимости тренировок, положительной динамике моторного восстановления, отсутствии компрометирующих реакций и ухудшения клинико-функционального статуса пациента проводится ступенчатая (каждые последующие 3 тренировки) интенсификация. При этом для отработки когнитивных навыков пациента в комплексный курс терапии на фоне движения дополнительно включаются когнитивные тесты - «Внимание», «Скорость реакции», «Двигательная реакция, «Зрительная память», при этом конкретное количество, длительность, уровень сложности уже освоенных тестов и последовательность их появления также задается программным обеспечением управляющего блока (9). Объектом управления являются виртуальные конечности пациента при взгляде от первого лица.
В процессе прохождения теста «Внимание» (Фиг. 5, 6) пациенту необходимо выбрать цифры по возрастанию. По мере успешного выполнения задания, оно программно усложняется. При этом пациент продолжает движение по дорожке, которая произвольно изменяет свою ширину. Задача пациента, «не упасть» с дорожки. Таким образом, в процесс тренировки включаются и непораженное и пораженное полушарие головного мозга. Упражнение выполняется с начала здоровой / менее поврежденной рукой, а затем поврежденной. В случае, если функции верхних конечностей не пострадали на фоне заболевания, упражнение выполняется в начале доминантной рукой, а затем недоминантной.
В процессе прохождения теста «Скорость реакции» (Фиг. 7, 8) пациенту предлагается как можно быстрее найти кубик, аналогичный центральному и выстрелить в него. По мере успешного выполнения задания, оно программно усложняется. При этом пациент продолжает движение по дорожке, которая произвольно изменяет свою ширину. Задача пациента, «не упасть» с дорожки. Упражнение выполняется с начала здоровой / менее поврежденной рукой, а затем поврежденной. Таким образом, в процесс тренировки включаются и непораженное и пораженное полушарие головного мозга. В случае, если функции верхних конечностей не пострадали на фоне заболевания, упражнение выполняется в начале доминантной рукой, а затем недоминантной.
В процессе прохождения теста «Двигательная реакция» (Фиг. 9-11) пациенту необходимо дотянуться до кубика: синего - правой рукой, желтого - левой рукой. Кубики появляются в такт ходьбы. Поскольку движение рук и ног при ходьбе и беге перекрестные, в этом упражнение отрабатывается и закрепляется нормальная двигательная реакция взаимодействия верхних и нижних конечностей при ходьбе.
В процессе прохождения теста «Зрительная память» (Фиг. 12, 13) пациенту необходимо запомнить, где располагаются парные картинки. Затем картинки закрываются, а пациенту необходимо по памяти открыть парные картинки, стреляя по кубикам. При этом пациент продолжает движение по дорожке, которая произвольно изменяет свою ширину. Задача пациента, «не упасть» с дорожки. Упражнение выполняется с начала здоровой / менее поврежденной рукой, а затем поврежденной. Таким образом, в процесс тренировки включаются и непораженное и пораженное полушарие головного мозга. В случае, если функции верхних конечностей не пострадали на фоне заболевания, упражнение выполняется в начале доминантной рукой, а затем недоминантной.
Дозировка и длительность комплексного курса терапии определяется индивидуально с учетом данных клинико-неврологического обследования, характеризующих возможность выполнения тестовых заданий, а также результатов инструментальных методов исследования.
Обслуживающий персонал на протяжении всего сеанса отслеживает информацию:
- по сенсорному экрану микропроцессорного блока (1): текущую скорость режима ходьбы, заданное и текущее давление стимуляции, заданное время цикла, оставшееся время цикла;
- на управляющем блоке с программным обеспечением текущий виртуальный контент, действия пациента, оставшееся время цикла.
Восстановление двигательных и когнитивных функций с использованием стимуляции опорных рецепторов стоп в режимах реальной локомоции, синхронизованной с виртуальной средой, дает правильный и мощный сигнал в центральную нервную систему, активизирует моторные центры спинальной и более высокой организации и запускают нейропластические процессы еще на стадии постельной иммобилизации. Формируется правильный физиологический паттерн ходьбы на уровне ЦНС. Это происходит за счет активации первичной сенсорной коры (S1), включающей обширные двусторонние зоны активации в парацентральных дольках, а также в первичной моторной коре (M1), двусторонней активации дополнительной моторной зоны (SMA), которая, активизируется при намерении выполнить действие (при этом само действие может и не последовать) и его прогнозировании, а также активации задних теменных областей, а именно области нижних теменных долек IPL (больше слева). Данные участки играют важную роль в оценке когнитивных стратегий и моторных программ, вовлеченных при последовательных движениях ногами. Кроме того, интенсивная активация дорсолатеральной префронтальной коры (DLPFC) позволяет эффективно восстанавливать когнитивные функции, такие как рабочая память, когнитивная гибкость, планирование, торможение и абстрактное мышление. Кроме того, вся сложная умственная деятельность требует дополнительных корковых и подкорковых цепей, с которыми связан DLPFC, являющийся высшей корковой областью, которая участвует в моторном планировании, организации и регуляции.
Эффективность предложенного способа реабилитации оценивался посредством комплексного исследования 26 пациентов с двигательным дефицитом после травматической болезни головного и спинного мозга, проходивших 16-дневный курс реабилитации в условиях специализированного стационара.
Средний возраст пациентов на момент начала исследования составил от 21 до 45 лет (средний возраст 33 года), мужчин было 18 (69,2%), женщин - 8 (30,8%)). Сроки с момента перенесенной травмы составляли от 5 до 38 мес. Большая часть - 60% были пациенты в периоде от 1 до 2 лет после травмы. В неврологическом статусе у всех больных наблюдались тяжелые двигательные нарушения в виде параплегии или парапареза, тетрапареза.
Состояние пациентов до реабилитации и после оценивалось по шкале ASIA IS. В остром периоде ПСМТ рангу «А» соответствовали 11 (42,3%) больных; рангу «В» - 9 (34,6%) и рангу «С» - 6 пациентов (23,1%). Таким образом, 76%) больных (ранг «А» и «В») были с низким реабилитационным потенциалом вследствие тяжести поражения спинного мозга.
Оценку качества жизни по параметрам независимости больного в ДПЖ проводили с помощью 3-х субшкал теста «Функциональная Оценочная Шкала для Больных с Травмой Спинного Мозга» - Valutazione Funzionale Mielolesi (VFM) [Taricco M. et al., 2000 5): «перемещения в постели» (VFM-1); «перемещения» (VFM-3) и «одевание» (VFM-5).
Все пациенты при поступлении получали стандартную медикаментозную терапию, физиолечение, кинезотерапию, массаж паретичных конечностей. В основной группе (18 чел.) применение метода пневмомеханической стимуляцией опорных рецепторов стоп, синхронизированной с виртуальной реальностью, включалось в «базисную программу» двигательной реабилитации, состоящую из лечебной гимнастики в зале с инструктором 45-60 мин. в день; лечебного плавания в бассейне, 30-40 мин/день; занятий в коленоупоре или динамическом параподиуме, до 30 мин/день; тренировок на роботизированных или реабилитационных тренажерах с БОС, до 30 мин/день. Пациенты контрольной группы (8 чел.) получали аналогичную программу двигательной реабилитации, но без использования программ виртуальной реальности. По возрасту, выраженности неврологической симптоматики обе группы больных были сопоставимы.
С целью оценки переносимости занятий с использованием виртуальной реальности использовался специально разработанный тест-опросник для пациентов, которые оценивали свои ощущения после первой и последней процедур по 5 бальной системе. В тест-опросник были включены следующие позиции: «ощущение головокружения и дискомфорта», «негативные ощущения во время процедуры», «уровень заинтересованности в дальнейших занятиях», «помощь виртуальной реальности в ощущениях двигательной активности».
В результате проведенных исследований было показано, что при исходном тетра- / нижнем парапарезе (ранг «С») динамика параметров качества жизни по уровню независимости в ДПЖ составила по компонентам: VFM-1 с 12,7 до 18,4 баллов (+44,9%, р<0,01), VFM-3 с 45,6 до 59,8 баллов (+31,1%), р<0,01), и по VFM-5 (только у больных с тетрапарезом) с 16,1 до 22,0 баллов (+36,6%, р<0,01).
После окончания курса реабилитации у всех пациентов основной группы отмечалось улучшение показателей функциональных тестов по сравнению с контрольной. Так, время выполнения заданий на зрительную память сократилось в среднем на 6,4+2,8 сек. (14,5%), на внимание на 5,1+2,3 сек. (11%), количество пропусков в тесте двигательной реакции на 3,4+1,8 (54,1%), время выполнения теста двигательной реакции на 2,0+1,4 сек (11,1%).
В то время как в группе сравнения после реабилитации степень тестируемых функциональных показателей улучшился в среднем на 2,1+1,1%.
Переносимость метода пневмомеханической стимуляцией опорных рецепторов стоп, синхронизированной с виртуальной реальностью у 66% пациентов оценена как «отличная» и «очень хорошая».
Таким образом, наибольший эффект от применения комплексной программы кинезотерапии с использованием метода пневмомеханической стимуляцией опорных рецепторов стоп, синхронизированной с виртуальной реальностью, отмечен у пациентов с исходно значительным и умеренным двигательным дефицитом.
Преимущества предложенного способа:
1. Может быть использован для пациентов с низким уровнем реабилитационного потенциала.
2. Может использоваться даже в горизонтальном положении, у пациентов с постельной иммобилизацией.
3. Неинвазивен.
4. Максимально физиологичен.
Предложенный способ может применяться как в научно-исследовательских, лечебных, реабилитационных учреждениях здравоохранения, так и в домашних условиях с целью профилактики и восстановления двигательной функции человека. Также может использоваться в спорте - для повышения эффективности моторной тренировки и в профилактических целях - у людей пожилого возраста и у лиц, ведущих малоподвижный образ жизни.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ранней реабилитации пациентов при остром поражении головного мозга с использованием виртуальной реальности | 2023 |
|
RU2835867C2 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПРИ ПОВРЕЖДЕНИИ ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ АППАРАТНОГО КОМПЛЕКСА ПНЕВМАТИЧЕСКОЙ КОМПРЕССИИ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2023 |
|
RU2823510C1 |
| Программно-аппаратный комплекс для лечения нарушений позы и ходьбы | 2022 |
|
RU2809515C2 |
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| Способ реабилитации детей с неврологическими осложнениями, связанными с химиотерапией при остром лимфобластном лейкозе | 2022 |
|
RU2789174C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| Способ реабилитации двигательных нарушений в виртуальной среде с выполнением нескольких задач одновременно у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2823137C1 |
| Способ реабилитации нарушений предметно-манипулятивной деятельности верхней конечности методом эрготерапии в виртуальной среде у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2817336C1 |
| Способ реабилитационных мероприятий у пациентов с нарушением статического и динамического равновесия | 2021 |
|
RU2781120C1 |
| Способ повышения эффективности восстановления двигательных функций человека с использованием метода визуального контроля движений в тренажере на основе технологий виртуальной реальности | 2020 |
|
RU2760484C1 |



Изобретение относится к медицине, а именно к неврологии и восстановительной медицине, и может быть использовано для реабилитации пациентов при повреждении головного и спинного мозга. Способ включает использование виртуальной среды с элементами управления и сенсорное взаимодействие с виртуальными объектами интегрированного в виртуальную среду пациента посредством использования по меньшей мере зрительного канала и тактильной стимуляции в виде пневмомеханического стимулирующего воздействия на рецепторы нижних конечностей. При этом виртуальным объектом сенсорного взаимодействия с пациентом является парящая на высоте дорожка для ходьбы, отрезки которой имеют разную ширину и меняются рандомно, причем пневмомеханическое стимулирующее воздействие оказывают на опорные рецепторы пяточной зоны стоп и опорные рецепторы плюсневой зоны стоп в скоростных режимах ходьбы, с воспроизведением цикла шага человека, при этом скорость оптического потока, создаваемого в виртуальной среде, синхронизирована со скоростью стимуляции опорных рецепторов стоп. Способ обеспечивает восстановление двигательных и когнитивных функций с использованием стимуляции опорных рецепторов стоп в режимах реальной локомоции, синхронизованной с виртуальной средой, дает правильный и мощный сигнал в центральную нервную систему, активизирует моторные центры спинальной и более высокой организации и запускают нейропластические процессы еще на стадии постельной иммобилизации за счет совокупности приемов заявленного изобретения. 3 з.п. ф-лы, 13 ил.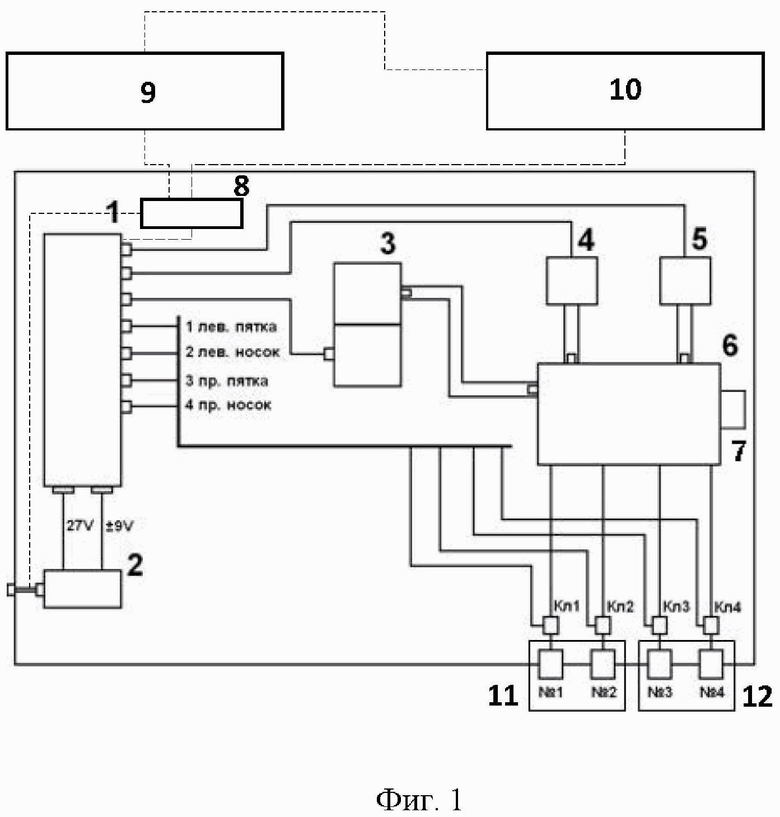
1. Способ реабилитации пациентов при повреждении головного и спинного мозга с использованием виртуальной реальности и биологической обратной связи, включающий использование виртуальной среды с элементами управления и сенсорное взаимодействие с виртуальными объектами интегрированного в виртуальную среду пациента посредством использования по меньшей мере зрительного канала и тактильной стимуляции в виде пневмомеханического стимулирующего воздействия на рецепторы нижних конечностей, отличающийся тем, что виртуальным объектом сенсорного взаимодействия с пациентом является парящая на высоте дорожка для ходьбы, отрезки которой имеют разную ширину и меняются рандомно, причем пневмомеханическое стимулирующее воздействие оказывают на опорные рецепторы пяточной зоны стоп и опорные рецепторы плюсневой зоны стоп в скоростных режимах ходьбы, с воспроизведением цикла шага человека, при этом скорость оптического потока, создаваемого в виртуальной среде, синхронизирована со скоростью стимуляции опорных рецепторов стоп.
2. Способ реабилитации по п. 1, отличающийся тем, что в качестве виртуального объекта сенсорного взаимодействия с пациентом посредством использования зрительного канала предусматривают предъявляемые в определенной последовательности на фоне виртуальной дорожки для ходьбы когнитивные тесты «Внимание», «Скорость реакции».
3. Способ реабилитации по п. 2, отличающийся тем, что в процессе прохождения теста «Внимание» пациенту необходимо выбрать с помощью элементов управления цифры по возрастанию.
4. Способ реабилитации по п. 2, отличающийся тем, что в процессе прохождения когнитивного теста «Скорость реакции» пациенту предлагается как можно быстрее найти с помощью элементов управления кубик, аналогичный центральному, и выстрелить в него.
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| Способ реабилитации двигательных нарушений | 2017 |
|
RU2645604C1 |
| KR 101777755 B1, 26.09.2017 | |||
| CN 110246583 A, 17.09.2019 | |||
| ЛАПТЕВА Е.С | |||
| и др | |||
| Реабилитация пациентов после инсульта | |||
| Медицинский алфавит | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| VILLIGER M | |||
| et al | |||
| Home-Based Virtual Reality-Augmented Training Improves Lower Limb Muscle Strength, Balance, and Functional | |||
