Настоящее изобретение относится к области медицинского приборостроения, в частности к программно-аппаратным комплексам с использованием виртуальной реальности, и может использоваться в тех областях медицины, где необходимо предупредить или лечить нарушение позы и ходьбы одновременно.
Внедрение ВР-технологий в комплекс восстановительных мероприятий пациентов с утратой функции ходьбы в результате травм головного мозга является очень важным фактором в процессе восстановления двигательных навыков. Традиционные подходы в подобных случаях не способны полностью решить задачу задействования процессов нейропластичности, в то время как реабилитационные методы с использованием BP, обеспечивающие обратную связь, могут эти процессы улучшить. Иллюзия движения, создаваемая посредством BP, активирует моторную зону контралатерального полушария так же интенсивно, как и произвольное. Кроме того, в процесс движения в BP, помимо моторной коры вовлекаются мозжечок, подкорковые ядра, теменная доля, круговая извилина. Данные подтверждены электроэнцефалограммой (ЭЭГ) - во время произвольных и воображаемых движений происходит десинхронизация μ-ритма (10-12 Гц), т.е. можно наблюдать активацию мозга пациентов на фоне реабилитационных мероприятий с применением BP [Neuper C, 2009].
Например, известен способ реабилитации больных с двигательными нарушениями функций конечностей с использованием виртуальной реальности по патенту на изобретение РФ №2655200, с приоритетом от 29.12.2016 г., опубл. 24.05.2018 г., включающий использование виртуальной среды с элементами управления и сенсорное взаимодействие с виртуальным объектом, при этом с учетом полученной с регистрирующих электроэнцефалографических и электромиографических датчиков информации, установленных на голове и пораженной конечности соответственно, а также способности пациента к движениям, регулируют объем управляющих виртуальных движений таким образом, что дает ощущение завершенности выполняемого движения при демонстрации заданий виртуальной реальности, причем сенсорное взаимодействие с виртуальными объектами посредством использования зрительного, слухового канала, а также тактильной и проприорецептивной стимуляции рецепторов конечности проводят таким образом, чтобы обеспечить ассоциирование пациента с виртуальным аватаром, с очувствлением тактильного и проприоцептивного контакта с виртуальными объектами и ощущением завершенности выполняемого движения.
При этом устройство для реализации известного способа включает устанавливаемые в проекции подошвенных поверхностей стоп четыре пневмоманжеты на каждую подошвенную поверхность. Причем пневмоманжеты выполнены таким образом, что каждый виртуальный шаг пациента синхронизирован с последовательным раздуванием пневмоманжет той же стороны, что дает пациенту тактильное ощущение контакта с виртуальным контентом, например, виртуальной дорожкой для перемещения.
Известное техническое решение имеет ряд недостатков. Так, пневмоманжеты в результате механического давления обжатием на конечность создают раздражение рецепторов как на опорной поверхности, так и на тыле стопы, который, по сути, не имеет никакого отношения к организации реакции опоры и формирования рефлекторной дуги, лежащей в основе управления локомоциями. Таким образом, обжатие приводит к созданию нефизиологичного, ненужного механического давления на конечность и никак не может формировать физиологическую реакцию цикла шага. При этом необходимо отметить, что имитация физиологического цикла шага не может формироваться только лишь посредством последовательного стимулирующего воздействия различные зоны левой и правой стопы, поскольку цикл шага представляет собой сложную программу, включающую в себя такие временные характеристики шага, как длительность цикла, опорной, переносной и двуопорной фаз, интервалы опоры на пятку, на всю стопу и носок.
Наиболее близким по своей технической сущности является устройство для имитации ходьбы с системой обратной связи, раскрытое в патенте РФ №2655200, с приоритетом от 05.03.2012 г., опубл. 10.02.2014 г., содержащее модуль питания, контрольно-измерительный модуль с датчиками измерения физиологических параметров, данные о которых передаются в компьютер с программным обеспечением, при этом устройство дополнительно содержит микропроцессорный блок управления, модуль ввода параметров, выполненный с возможностью выбора режима воздействия; компьютер с программным обеспечением, выполненным с возможностью управления микропроцессорным блоком управления и с возможностью задавать предельно допустимые значения физиологических параметров, при превышении которых осуществляется оповещение или имитация ходьбы автоматически прекращается, ортезы со стельками, содержащими встроенные пневмокамеры, в которые поступает воздух под давлением через пневмоклапаны из ресивера, снабженного датчиком давления и регулирующим клапаном, и соединенного с компрессором, при этом микропроцессорный блок управления выполнен с возможностью получения данных с датчика давления, на основании которых регулируется давление в пневмокамерах.
Известное устройство имеет недостатки. В частности, отсутствует обратная связь с пациентом в виде виртуального контента, что снижает эффективность устройства, поскольку отсутствует иллюзия движения, положительно влияющая на активизацию мозговых зон, задействованных в процессе формирования правильного моторного шагового стереотипа. При этом также отсутствуют средства, позволяющие реализовать последовательное стимулирующее воздействие различных зон левой и правой стопы, с имитацией физиологического цикла шага.
Задачей настоящего изобретения является создание программно-аппаратного комплекса для эффективного лечения нарушений двигательных и когнитивных функций у пациентов с тяжелым повреждением головного и спинного мозга, с использованием виртуальной реальности.
Техническим результатом является повышение эффективности лечения нарушений двигательных функций у пациентов с нарушениями позы и ходьбы, с использованием виртуальной реальности.
Заявленный технический результат достигается программно-аппаратным комплексом для лечения нарушений позы и ходьбы, содержащим управляющий блок с панелью управления и встроенным программным обеспечением, который связан с модулем питания, микропроцессорный блок, компрессор, соединенный с ресивером, снабженным регулирующим клапаном и датчиком давления, ортезы со стельками, снабженными двумя встроенными пневмокамерами для оказания стимулирующего воздействия на опорные рецепторы стоп пациента, выполненными с возможностью поступления воздуха под давлением через клапаны из ресивера, при этом микропроцессорный блок выполнен с возможностью управления клапанами пневмокамер в режиме подача/стравливание воздуха, при этом согласно изобретению программно-аппаратный комплекс содержит блок виртуальной реальности, связанный с микропроцессорным блоком и управляющим блоком, причем управляющий блок выполнен с возможностью выбора на панели управления программы воздействия на пациента, включая время воздействия и виртуальный контент, при этом управление клапанами пневмокамер осуществляется последовательно, в порядке, соответствующем циклограмме шага ходьбы, путем подачи воздуха в пневмокамеры для воздействия на опорные рецепторы плюсневой зоны правой стопы пациента, последующей подачи воздуха в пневмокамеру для воздействия на опорные рецепторы пяточной зоны левой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы плюсневой зоны правой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы пяточной зоны левой стопы пациента, последующей подачи воздуха в пневмокамеру воздействия на опорные рецепторы плюсневой зоны левой стопы пациента, последующей подачи воздуха в пневмокамеру воздействия на опорные рецепторы пяточной зоны правой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы плюсневой зоны левой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы пяточной зоны правой стопы пациента.
Программно-аппаратный комплекс для лечения нарушений позы и ходьбы обеспечивает воспроизведение реального цикла шага человека, синхронизированного с оптическим потоком, создаваемым в виртуальной среде, что позволяет моделировать сенсорный образ шага в режиме физиологической, закрепленной в эволюции циклограммы ходьбы и активизировать моторные центры спинальной и более высокой организации, в том числе в первичной сенсомоторной коре и в дополнительной двигательной области еще на стадии постельной иммобилизации пациентов.
В предпочтительном варианте ортезы изготавливаются из экокожи, что создает у пациента привычные ощущения обычной повседневной обуви и тем самым усиливает эффект иллюзии ходьбы во время стимуляции.
При этом стелька каждого ортеза предпочтительно выполняется из материала, подстраивающейся под стопу пациента, что позволяет более точно стимулировать зоны максимального скопления опорных рецепторов - пятка и плюсна, большой палец стопы.
Микропроцессорный блок может быть выполнен с сенсорным экраном, обеспечивающим возможность визуализации и управления, что позволяет в целом повысить удобство использования.
При этом микропроцессорный блок предпочтительно выполнен с возможностью управления регулирующим клапаном, который напрямую соединен с микропроцессорным блоком, что позволяет контролировать и поддерживать необходимое давление в ресивере.
При этом управляющий блок может быть выполнен с экраном для визуализации виртуального контента, тем самым обеспечивая возможность контроля текущего виртуального контента, действий пациента, оставшегося времени цикла.
При этом программно-аппаратный комплекс предпочтительно содержит модуль поддержки беспроводной связи, через который блок виртуальной реальности связан с микропроцессорным блоком и управляющим блоком, а управляющий блок связан с модулем питания. Таким образом повышается удобство использования.
Изобретение поясняется чертежами, где:
- На Фиг. 1 - представлена функциональная блок-схема аппаратно-программного комплекса для лечения нарушений позы и ходьбы;
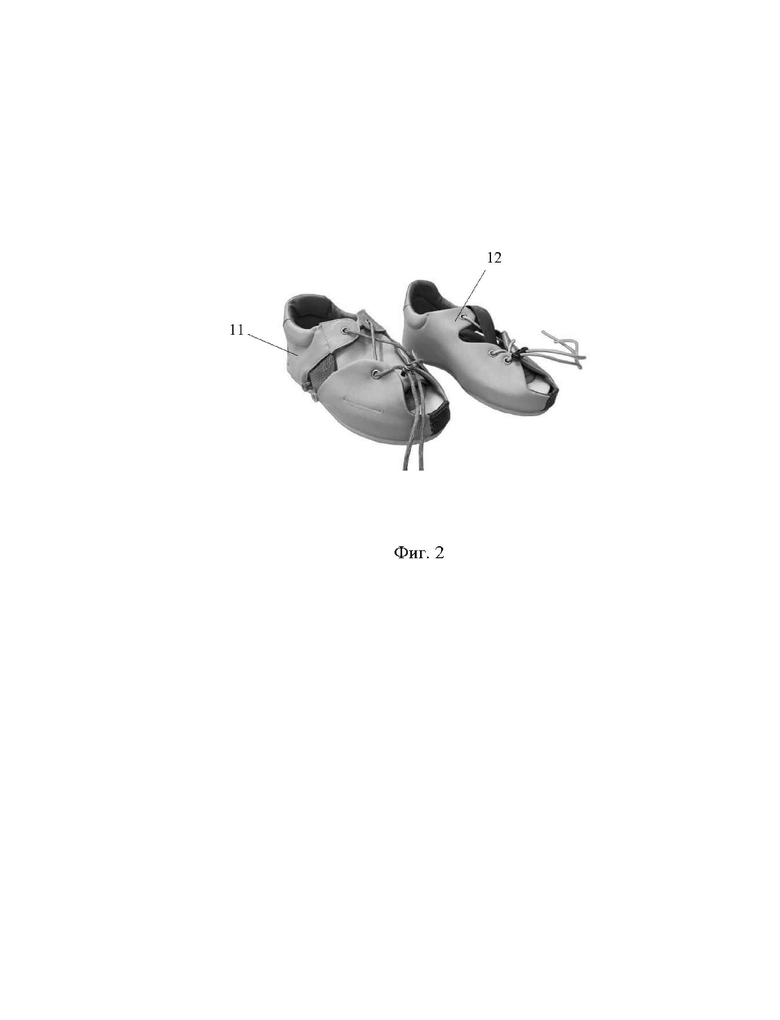
- На Фиг. 2 - изображены ортезы со встроенными в стельки пневмоклапанами.
Программно-аппаратный комплекс (Фиг. 1) содержит управляющий блок (портативный) с программным обеспечением (9), микропроцессорный блок с сенсорным экраном (1), модуль поддержки беспроводной связи (8), модуль питания микропроцессорного блока (2), компрессор (3), регулирующий клапан (4), датчик давления (5), ресивер (6), аварийный клапан (7), блок виртуальной реальности (10), правый (11) и левый (12) ортезы (см. Фиг. 2), со встроенными в стельку правого ортеза (11) пневмокамерами (13), (14) с клапанами (15), (16), и в стельку левого ортеза (12) - пневмокамерами (17), (18) с клапанами (19), (20). При этом пневмокамеры (13), (17) оказывают стимулирующее воздействие на опорные рецепторы пяточной зоны стопы (пятка), а пневмокамеры (14), (18) - на опорные рецепторы плюсневой зоны стопы (носок). Микропроцессорный блок (1) и блок виртуальной реальности (10) при помощи управляющего блока (9) через модуль поддержки беспроводной связи (8) подключены в единую систему.
Работа программно-аппаратного комплекса осуществляется следующим образом.
Во время проведения процедуры пациент может находиться в горизонтальном положении, на спине, со слегка приподнятым изголовьем, ноги должны быть выпрямлены (допускается положение ног в легком упоре, например в спинку кровати, для предотвращения ротации стоп), сидя в коляске, сидя на стуле с согнутыми ногами в коленных и тазобедренных суставах под 90 град.
Пациенту производится установка на голову шлема, либо очков виртуальной реальности (блок виртуальной реальности (10). Шлем подгоняется и фиксируется с помощью регуляторов, вначале задних, а затем верхних. Затем на стопы пациента одеваются ортезы (11), (12) соответствующего типоразмера, с вложенными в них пневмостельками, и плотно фиксируется с помощью ремней. Затем на панели управления управляющего блока (9) выбирается компьютерная программа воздействия на пациента в данном сеансе: время воздействия, виртуальный контент (например, уходящая в даль виртуальная дорожка, которая произвольно меняет в ходе движения свою ширину). После запуска выбранной компьютерной программы управляющий блок (9) через модуль поддержки беспроводной связи (8) (например, через Wi-Fi) подает сигнал в блок виртуальной реальности (10) на визуализацию пациенту виртуального контента (например, виртуальной дорожки для ходьбы) и одновременно, через модуль поддержки беспроводной связи (8) подает сигнал модулю питания (2) на включение компрессора (3) и ресивера (6). От блока виртуальной реальности (10) через модуль поддержки беспроводной связи (8) подается сигнал на микропроцессорный блок (1). На сенсорном экране блока (1) в зависимости от виртуального контента задаются скорость оптического потока в виртуальной среде и временные параметры физиологического цикла шага (опорная и переносная фазы, интервалы опоры на пятку и носок) в диапазоне скорости ходьбы от 1 км/ч до 9 км/ч, при давлении в пневмокамерах (13), (14), (17), (18) - от 10 кПа до 70 кПа.
Одновременно с началом воспроизведения виртуального контента, из ресивера (6) с помощью клапанов (15), (16), (19), (20), работающих в режиме подача/стравливание воздуха через пневмопровод, осуществляется подача воздуха в пневмокамеры (13), (14), (17), (18) стелек ортезов (11), (12). Управление клапанами (15), (16), (19), (20) осуществляется микропроцессорным блоком (1) согласно циклограмме шага ходьбы, в следующей последовательности:
1. Раздувается пневмокамера (14), что соответствует началу фазы опоры на правый носок.
2. Раздувается пневмокамера (17), что соответствует началу дву опорной фазы опоры на левую пятку и правый носок.
3. Сжимается пневмокамера (14), что соответствует завершению фазы опоры на правый носок и началу фазы переноса правой ноги.
4. Сжимается пневмокамера (17), что соответствует завершению фазы опоры на левую пятку и началу фазы переката левой ноги.
5. Раздувается пневмокамера (18), что соответствует завершению фазы переката левой ноги и началу фазы опоры на левый носок.
6. Раздувается пневмокамера (13), что соответствует началу дву опорной фазы опоры на левый носок и правую пятку.
7. Сжимается пневмокамера (18), что соответствует завершению фазы опоры на левый носок и началу фазы переноса левой ноги.
8. Сжимается пневмокамера (13), что соответствует завершению фазы опоры на правую пятку и началу фазы переката правой ноги.
На этом цикл управления клапанами пневмокамер, соответствующий одному шагу ходьбы, завершается, либо повторяется в зависимости от выбранной посредством панели управления блока (9) программы воздействия на пациента.
Давление в ресивере поддерживается системой автоматического управления следующим образом: давление в ресивере измеряется с помощью датчика давления (5) и передается в микропроцессорный блок с сенсорным экраном (1), где переводится в цифровую форму и сравнивается с заданным значением.
Обслуживающий персонал на протяжении всего сеанса отслеживает информацию:
- по сенсорному экрану микропроцессорного блока (1): текущую скорость режима ходьбы, заданное и текущее давление стимуляции, заданное время цикла, оставшееся время цикла;
- на экране управляющего блока с программным обеспечением текущий виртуальный контент, действия пациента, оставшееся время цикла.
Ортезы со стельками с пневмокамерами изготавливаются из экокожи. Эргономически они соответствуют обычной обуви, что создает у пациента привычные ощущения обычной повседневной обуви и тем самым усиливает эффект иллюзии ходьбы во время стимуляции. Выполнение в каждом ортезе закрепленной мягкой подстраивающейся под стопу пациента стельки со встроенными в нее двумя пневмокамерами позволяет более точно стимулировать зоны максимального скопления опорных рецепторов - пятка и плюсна, большой палец стопы.
Преимущества предложенного программно-аппаратного комплекса:
1. Может быть использован для пациентов с низким уровнем реабилитационного потенциала.
2. Мобильный, может использоваться как в палате пациента, так и в реабилитационном кабинете.
3. Может использоваться даже горизонтальном положении, у пациентов с постельной иммобилизацией.
4. Неинвазивен.
5. Максимально физиологичен.
Программно-аппаратный комплекс может применяться как в научно-исследовательских, лечебных, реабилитационных учреждениях здравоохранения, так и в домашних условиях с целью профилактики и восстановления двигательной функции человека. Также может использоваться в спорте - для повышения эффективности моторной тренировки и в профилактических целях - у людей пожилого возраста и у лиц, ведущих малоподвижный образ жизни.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реабилитации пациентов при повреждении головного и спинного мозга с использованием виртуальной реальности и биологической обратной связи | 2022 |
|
RU2805120C2 |
| Способ ранней реабилитации пациентов при остром поражении головного мозга с использованием виртуальной реальности | 2023 |
|
RU2835867C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ХОДЬБЫ С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ | 2012 |
|
RU2506069C2 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПРИ ПОВРЕЖДЕНИИ ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ АППАРАТНОГО КОМПЛЕКСА ПНЕВМАТИЧЕСКОЙ КОМПРЕССИИ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2023 |
|
RU2823510C1 |
| УСТРОЙСТВО ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ НАРУШЕНИЙ ЛОКОМОЦИИ (ВАРИАНТЫ) | 2005 |
|
RU2330640C1 |
| СПОСОБ АКТИВНОЙ КОРРЕКЦИИ СТОПЫ | 2015 |
|
RU2610057C2 |
| СПОСОБ ЛЕЧЕНИЯ ПЛОСКО-ВАЛЬГУСНОЙ УСТАНОВКИ СТОП И ПРОДОЛЬНОГО ПЛОСКОСТОПИЯ У ДЕТЕЙ | 2017 |
|
RU2645404C1 |
| Устройство для контроля нагрузки на стопы | 2023 |
|
RU2816055C1 |
| СПОСОБ ЛЕЧЕНИЯ ПОПЕРЕЧНОГО ПЛОСКОСТОПИЯ | 2017 |
|
RU2662707C1 |
| СПОСОБ КОРРЕКЦИИ НАРУШЕНИЙ ПОЗЫ И ХОДЬБЫ ПРИ ДЦП | 2013 |
|
RU2539401C1 |

Изобретение относится к медицинской технике, а именно к программно-аппаратным комплексам с использованием виртуальной реальности для лечения нарушений позы и ходьбы. Программно-аппаратный комплекс для лечения нарушений позы и ходьбы содержит управляющий блок с панелью управления и встроенным программным обеспечением, который связан с модулем питания, микропроцессорный блок, компрессор, соединенный с ресивером, снабженным регулирующим клапаном и датчиком давления, ортезы со стельками, снабженными двумя встроенными пневмокамерами для оказания стимулирующего воздействия на опорные рецепторы стоп пациента, выполненными с возможностью поступления воздуха под давлением через клапаны из ресивера. Микропроцессорный блок выполнен с возможностью управления клапанами пневмокамер в режиме подачи/стравливания воздуха. Комплекс содержит блок виртуальной реальности, связанный с микропроцессорным блоком и управляющим блоком, причем управляющий блок выполнен с возможностью выбора на панели управления программы воздействия на пациента, включая время воздействия и виртуальный контент. Управление клапанами пневмокамер осуществляется последовательно, в порядке, соответствующем циклограмме шага ходьбы, путем подачи воздуха в пневмокамеры для воздействия на опорные рецепторы плюсневой зоны правой стопы пациента, последующей подачи воздуха в пневмокамеру для воздействия на опорные рецепторы пяточной зоны левой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы плюсневой зоны правой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы пяточной зоны левой стопы пациента, последующей подачи воздуха в пневмокамеру воздействия на опорные рецепторы плюсневой зоны левой стопы пациента, последующей подачи воздуха в пневмокамеру воздействия на опорные рецепторы пяточной зоны правой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы плюсневой зоны левой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы пяточной зоны правой стопы пациента. Техническим результатом является повышение эффективности лечения нарушений двигательных функций у пациентов с нарушениями позы и ходьбы с использованием виртуальной реальности. 4 з.п. ф-лы, 2 ил.
1. Программно-аппаратный комплекс для лечения нарушений позы и ходьбы, содержащий управляющий блок с панелью управления и встроенным программным обеспечением, который связан с модулем питания, микропроцессорный блок, компрессор, соединенный с ресивером, снабженным регулирующим клапаном и датчиком давления, ортезы со стельками, снабженными двумя встроенными пневмокамерами для оказания стимулирующего воздействия на опорные рецепторы стоп пациента, выполненными с возможностью поступления воздуха под давлением через клапаны из ресивера, при этом микропроцессорный блок выполнен с возможностью управления клапанами пневмокамер в режиме подачи/стравливания воздуха, отличающийся тем, что содержит блок виртуальной реальности, связанный с микропроцессорным блоком и управляющим блоком, причем управляющий блок выполнен с возможностью выбора на панели управления программы воздействия на пациента, включая время воздействия и виртуальный контент, при этом управление клапанами пневмокамер осуществляется последовательно, в порядке, соответствующем циклограмме шага ходьбы, путем подачи воздуха в пневмокамеры для воздействия на опорные рецепторы плюсневой зоны правой стопы пациента, последующей подачи воздуха в пневмокамеру для воздействия на опорные рецепторы пяточной зоны левой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы плюсневой зоны правой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы пяточной зоны левой стопы пациента, последующей подачи воздуха в пневмокамеру воздействия на опорные рецепторы плюсневой зоны левой стопы пациента, последующей подачи воздуха в пневмокамеру воздействия на опорные рецепторы пяточной зоны правой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы плюсневой зоны левой стопы пациента, последующего стравливания воздуха из пневмокамеры воздействия на опорные рецепторы пяточной зоны правой стопы пациента.
2. Программно-аппаратный комплекс по п. 1, отличающийся тем, что ортезы изготовлены из экокожи.
3. Программно-аппаратный комплекс по п. 1, отличающийся тем, что микропроцессорный блок выполнен с сенсорным экраном.
4. Программно-аппаратный комплекс по п. 1, отличающийся тем, что управляющий блок выполнен с экраном для визуализации виртуального контента.
5. Программно-аппаратный комплекс по п. 1, отличающийся тем, что содержит модуль поддержки беспроводной связи, через который блок виртуальной реальности связан с микропроцессорным блоком и управляющим блоком, а управляющий блок связан с модулем питания.
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ХОДЬБЫ С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ | 2012 |
|
RU2506069C2 |
| УСТРОЙСТВО ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ НАРУШЕНИЙ ЛОКОМОЦИИ (ВАРИАНТЫ) | 2005 |
|
RU2330640C1 |
| WO 2021201605 A1, 07.10.2021 | |||
| US 7998092 B2, 16.08.2011 | |||
| DE 102019119817 A1, 28.01.2021 | |||
| УСТРОЙСТВО ДЛЯ РЕАБИЛИТАЦИИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА В УСЛОВИЯХ НЕВЕСОМОСТИ | 1999 |
|
RU2148981C1 |
| RU 2014139567 A, 20.04.2016. | |||
