Настоящее изобретение относится к подвесной конструкции типа, содержащего вход и выход, которые соединены, соответственно, с расположенным раньше по ходу движения участком и расположенным дальше по ходу движения участком подвесной канатной транспортной линии, каждый из которых проходит в целом прямолинейно по меньшей мере в проекции на горизонтальную плоскость, причем эти расположенные раньше по ходу движения и дальше по ходу движения участки соединены между собой промежуточным участком, изогнутым в этой горизонтальной плоскости, при этом конструкция дополнительно содержит по меньшей мере одну боковую направляющую, которая действует по меньшей мере на первую часть промежуточного участка.
Конструкции этого типа используются, в частности, для взаимного соединения расположенного раньше по ходу движения участка линии и расположенного дальше по ходу движения участка линии, каждый из которых проходит в соответствии с прямолинейным контуром в проекции на горизонтальную плоскость, когда эти соответствующие контуры образуют относительно друг друга угол в этой горизонтальной плоскости, или горизонтальный угол. Иными словами, такие конструкции используются для направления промежуточной части линии в соответствии с контуром поворота.
В документе FR2882321 описана станция посадки с высоким притоком для подвесной канатной транспортной установки с непрерывным перемещением и отцепляемыми сиденьями, которая содержит путь передачи для направления и транспортировки сидений, отсоединенных от несуще-тягового каната, причем путь передачи подразделяется на участок подачи, участок отправления, параллельный участку подачи, и промежуточный участок, изогнутый на 180°, соединяющий участок подачи с участком отправления. Промежуточный участок содержит первый изгиб и второй изгиб разной кривизны, при этом второй изгиб, связанный с участком отправления, образован частью клотоиды с радиусом кривизны, большим, чем радиус кривизны первого изгиба, связанного с участком подачи. Путь передачи находится между двумя транспортными путями установки, которые параллельны друг другу. Участок подачи соединен с одним из этих путей, тогда как участок отправления соединен с другим. Сиденья проходят через путь передачи с замедленным ходом, обычно со скоростью приблизительно 0,5 метра в секунду, позволяя лыжникам осуществить посадку на ходу. Эта посадка предусмотрена вблизи сопряжения с прямой линией участка отправления. Результатом является улучшение поведения сиденья перед посадкой и гибкость при посадке с большой вместимостью.
Из документа DE 19704825 также известна установка канатной дороги моноканатного типа, в которой промежуточная часть несуще-тягового каната направляется на стойках распределенных вдоль кривой траектории посредством вращающихся роликов. Эти ролики выполнены с возможностью поочередно убираться при прохождении транспортных средств. Убираясь, ролик высвобождает несуще-тяговый канат из своего захвата. Последний затем направляется роликом следующей стойки, который еще не убран, и роликом предыдущей стойки, который уже занял свое положение перед тем, как убраться.
В принципе установка, описанная в документе DE 19704825, является удовлетворительной. Тем не менее, на практике эта установка ограничивается моноканатными канатными дорогами, с одной стороны, и довольно слабыми угловыми захватами, с другой стороны. В случае большого горизонтального угла между расположенной раньше по ходу движения частью линии и расположенной дальше по ходу движения частью линии рассматриваемая установка становится ограничивающей, поскольку она требует обеспечения очень длинного изогнутого промежуточного участка.
Рассматриваемая установка, следовательно, не может использоваться в городской или пригородной среде, где важны габаритные ограничения и предпочтение отдается двухканатным канатным дорогам. Кроме того, в такой среде канатные дороги должны быть эффективными, что означает, что транспортные средства могут быстро перемещаться по линии без ущерба для комфорта пассажиров.
Настоящее изобретение направлено на улучшение этой ситуации.
Предложена подвесная конструкция для установки канатной дороги типа, содержащего по меньшей мере один тяговый канат. Конструкция содержит вход и выход, предусмотренные для соединения, соответственно, с в целом прямолинейными расположенным раньше по ходу движения участком и расположенным дальше по ходу движения участком пути транспортировки установки канатной дороги. Конструкция содержит промежуточный участок, изогнутый по меньшей мере в проекции на горизонтальную плоскость, соединенный с входом и выходом. Конструкция также содержит по меньшей мере одну активную направляющую транспортного средства по меньшей мере в поперечном направлении на первой части по меньшей мере изогнутого промежуточного участка. Указанная первая часть проходит в целом вдоль части радиоиды или псевдо-радиоиды по меньшей мере в проекции на горизонтальную плоскость или среднюю плоскость, содержащую указанный вход и указанный выход. Конструкция также содержит по меньшей мере одну активную направляющую тягового каната между входом и выходом, выполненную с возможностью отклонения указанного каната по меньшей мере в поперечном направлении между указанным входом и указанным выходом.
Выполнение одной или более частей в форме радиоиды, в частности клотоиды, вдоль поворота позволяет оптимизировать трассу линии. При условии постоянной скорости прохождения транспортных средств можно выполнить оптимальный поворот с учетом его габаритного размера, при этом соблюдая предельные значения, касающиеся, например, бокового ускорения или рывка. Прежде всего, можно более точно приблизиться к этим значениям, что позволяет, по сравнению с классическими установками, либо уменьшить габаритный размер конструкции поворота при той же скорости прохождения транспортных средств, либо увеличить эту скорость при таком же габаритном размере.
Также предложена подвесная канатная транспортная установка, содержащая по меньшей мере одну конструкцию, такую как предложенная выше.
Настоящее изобретение будет лучше понято при ознакомлении с подробным описанием ниже, приведенным со ссылкой на графические материалы, на которых:
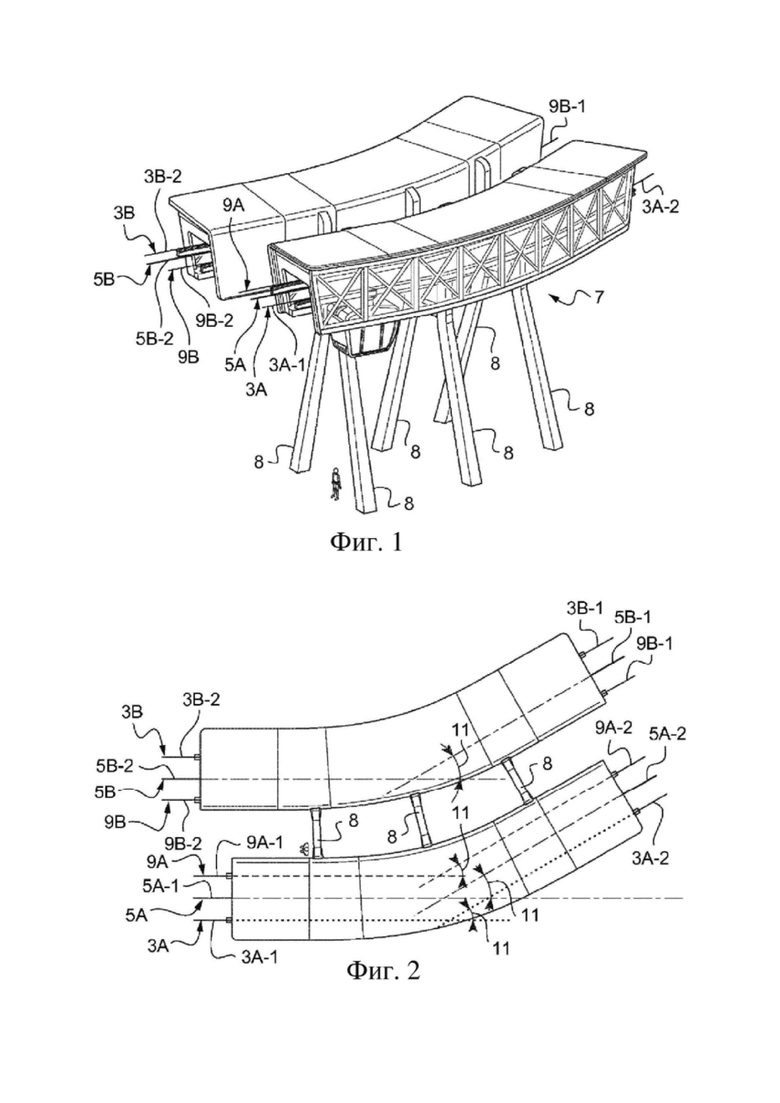
- на фиг. 1 показан вид в перспективе конструкции поворота согласно настоящему изобретению;
- на фиг. 2 представлен вид сверху конструкции по фиг. 1;
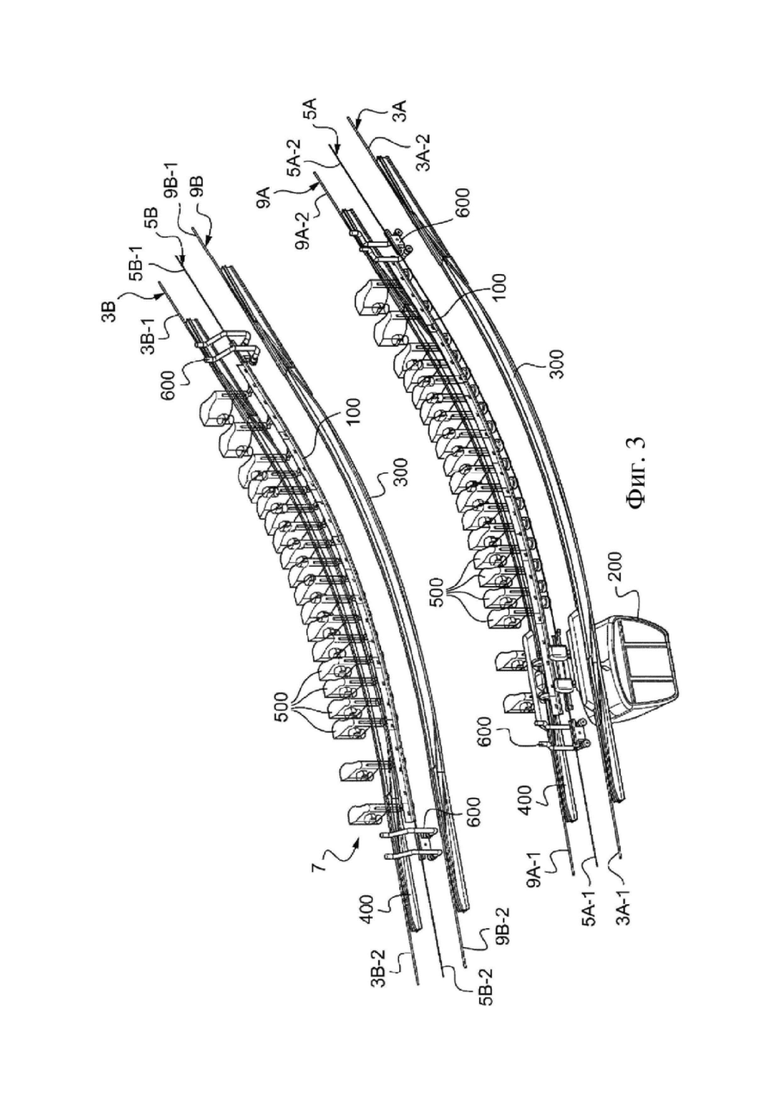
- на фиг. 3 частично представлена конструкция поворота по фиг. 1;
- на фиг. 4 показан вид сверху, соответствующий фиг. 3;
- на фиг. 5 и 6 представлена часть фиг. 3;
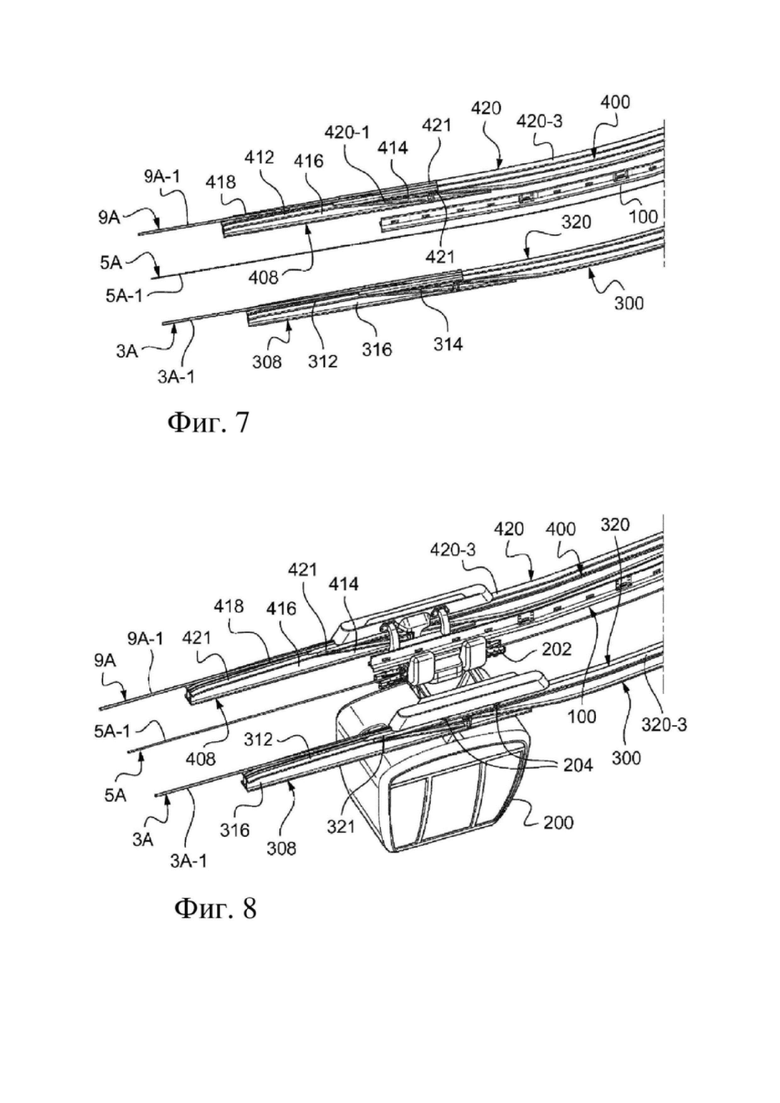
- на фиг. 7 представлено детальное изображение VII по фиг. 5 без транспортного средства;
- на фиг. 8 представлено детальное изображение VII по фиг. 5 с транспортным средством;
- на фиг. 9 представлен вид сверху части по фиг. 3 без направляющего рельса;
- на фиг. 10 представлено детальное изображение X по фиг. 9;
- на фиг. 11 представлен вид спереди шасси транспортного средства в зацеплении с конструкцией поворота по фиг. 1;
- на фиг. 12 представлена часть по фиг. 3 без транспортного средства и направляющего рельса;
- на фиг. 13 представлено детальное изображение XIII по фиг. 12 без транспортного средства и с убранными роликами;
- фиг. 14 аналогична фиг. 13 с транспортным средством;
- на фиг. 15 показано графическое изображение траектории транспортного средства вдоль конструкции поворота по фиг. 1;
- на фиг. 16 показано графическое изображение изменения во времени угла отклонения транспортного средства вдоль конструкции поворота по фиг. 1;
- на фиг. 17 показано графическое изображение изменения радиуса кривизны траектории транспортного средства вдоль конструкции поворота по фиг. 1;
- на фиг. 18 показано графическое изображение изменения во времени бокового ускорения, которому подвергается центр тяжести транспортного средства вдоль конструкции поворота по фиг. 1;
- на фиг. 19 показано графическое изображение изменения во времени рывка, которому подвергается центр тяжести транспортного средства вдоль конструкции поворота в зависимости от времени;
- на фиг. 20–28 показаны графические изображения конструкции в проекции на среднюю плоскость.
Графические материалы содержат элементы с определенными ссылочными номерами. Таким образом, они могут не только служить для описания настоящего изобретения, но и способствовать его определению, если это необходимо.
Рассмотрим фиг. 1 и 2.
Канатная установка для перевозки транспортных средств, в данном случае типа канатной дороги, содержит транспортную линию с первым путем движения или путем прямого хода, вдоль которой проходит по меньшей мере один несущий канат 3A и первой ветвью тягового каната, или ветвью 5A прямого хода. Установка содержит подвесную конструкцию 7, которая участвует в поддержании в воздухе по меньшей мере части несущего каната 3A и ветви 5A прямого хода в соответствии с контуром линии. Эта подвесная конструкция в данном случае поддерживается множеством стоек 8. Установка здесь дополнительно содержит дополнительный несущий канат или второй несущий канат 9A, который проходит вдоль пути прямого хода и также поддерживается в воздухе по меньшей мере частично конструкцией 7.
В данном случае транспортная линия установки канатной дороги также содержит второй путь движения или путь обратного хода, аналогичный пути прямого хода. Вдоль этого пути обратного хода проходят канаты, аналогичные канатам пути прямого хода, а именно первому несущему канату 3B, второй ветви тягового каната, или ветви 5B обратного хода, и второму несущему канату 9B. Первый несущий канат 3B, ветвь 5B обратного хода и второй несущий канат 9B пути обратного хода поддерживаются в воздухе в соответствии с контуром линии по меньшей мере частично с помощью конструкции 7.
Конструкция 7 также обеспечивает отклонение направления по меньшей мере в поперечном направлении канатов пути прямого хода между расположенной раньше по ходу движения частью и расположенной дальше по ходу движения частью, которые проходят в целом прямолинейно по меньшей мере вблизи конструкции 7, по меньшей мере в проекции на горизонтальную плоскость. Таким образом, контур линии содержит часть поворота, которая соединяет две части этого контура, проходящие в целом прямолинейно по меньшей мере в проекции на горизонтальную плоскость. Конструкция 7 направляет канаты пути прямого хода в часть поворота контура линии.
Аналогичным образом, конструкция 7 также обеспечивает отклонение в направлении канатов пути обратного хода между расположенной раньше по ходу движения частью, проходящей в целом параллельно расположенной дальше по ходу движения части пути прямого хода и расположенной дальше по ходу движения частью, проходящей в целом параллельно расположенной раньше по ходу движения части пути прямого хода. Конструкция 7 также направляет канаты пути обратного хода в часть поворота контура линии, при этом эта часть поворота подобна части поворота пути прямого хода.
В варианте осуществления, который описан в этом документе, конструкция 7 отклоняет канаты пути прямого хода и пути обратного хода в целом в горизонтальной плоскости. Конструкция 7 осуществляет горизонтальное отклонение линии без вертикального отклонения.
Несущий канат 3A содержит расположенную раньше по ходу движения часть 3A-1, которая проходит вдоль первой части контура линии, и расположенную дальше по ходу движения часть 3A-2, которая проходит вдоль второй части контура линии. Первая часть контура линии и вторая его часть проходят в целом прямолинейно по меньшей мере вблизи конструкции 7 и в проекции на горизонтальную плоскость. Первая часть контура линии и вторая его часть проходят в по сути горизонтальной плоскости и наклонены относительно друг друга под углом Альфа 11. В горизонтальной плоскости расположенная дальше по ходу движения часть 3A-2 первого несущего каната 3A наклонена под углом Альфа 11 относительно расположенной раньше по ходу движения части 3A-1 этого каната. В проиллюстрированном здесь примере угол Альфа 11 составляет приблизительно 30 градусов.
По меньшей мере раньше по ходу движения от конструкции 7 и дальше по ходу движения от нее ветвь 5A прямого хода тягового каната проходит в целом параллельно первому несущему канату 3A и второму несущему канату 9A. Ветвь 5A прямого хода содержит расположенную раньше по ходу движения часть 5A-1 и расположенную дальше по ходу движения часть 5A-2, наклоненную горизонтально под углом Альфа 11 относительно ее расположенной раньше по ходу движения части 5A-1, тогда как второй несущий канат 9A содержит расположенную раньше по ходу движения часть 9A-1 и расположенную дальше по ходу движения часть 9A-2, которая наклонена горизонтально под углом Альфа 11 относительно его расположенной раньше по ходу движения части 9A-1.
Аналогичным образом, конструкция 7 обеспечивает отклонение расположенной раньше по ходу движения части пути обратного хода к расположенной дальше по ходу движения части этого пути, в частности расположенной раньше по ходу движения части 5B-1 ветви 5B обратного хода к расположенной дальше по ходу движения части 5B-2, расположенной раньше по ходу движения части 3B-1 к расположенной дальше по ходу движения части 3B-2 третьего несущего каната 3B и расположенной раньше по ходу движения части 9B-1 к расположенной дальше по ходу движения части 9B-2 четвертого несущего каната 9B.
Рассмотрим фиг. 3 и 4.
Конструкция поворота, например конструкция 7 по фиг. 1 и 2, содержит направляющую транспортного средства, размещенную между расположенной раньше по ходу движения частью пути движения, например пути прямого хода, в целом прямолинейной, и его расположенной дальше по ходу движения частью, в целом прямолинейной и наклоненной горизонтально относительно расположенной раньше по ходу движения части, например под углом Альфа 11, показанным на фиг. 1 и 2.
Направляющая транспортного средства содержит изогнутый рельс 100, проходящий вдоль части поворота контура линии. На входе в поворот каждое транспортное средство 200, которое движется по пути прямого хода, входит в зацепление с изогнутым рельсом 100, на первом его конце. На выходе из поворота транспортное средство 200 выходит из зацепления с изогнутым рельсом 100 на его втором конце, противоположном первому. Изогнутый рельс 100 направляет транспортное средство в поперечном направлении.
Конструкция поворота также содержит путь качения для транспортного средства 200, соединяющий расположенную раньше по ходу движения часть пути движения с расположенной дальше по ходу движения частью. Путь качения содержит первую изогнутую балку, или внешнюю балку 300, которая соединяет расположенную раньше по ходу движения часть несущего каната, например расположенную раньше по ходу движения часть 3A-1 первого несущего каната 3A по фиг. 1 и 2, с его расположенной дальше по ходу движения частью, например расположенной дальше по ходу движения частью 3A-2. Путь качения в данном случае также содержит вторую изогнутую балку, или внутреннюю балку 400, подобную внешней балке 300, для дополнительного несущего каната пути движения, например второго несущего каната 9A пути прямого хода на фиг. 1 и 2.
На входе в поворот, по меньшей мере вблизи него, транспортное средство 200 выходит из зацепления с одним или более несущими канатами, например первым несущим канатом 3A и вторым несущим канатом 9A пути прямого хода, для качения по пути качения, в данном случае по верхней поверхности внешней балки 300 и верхней поверхности внутренней балки 400. Во время качения вдоль этого пути транспортное средство 200 направляется в поперечном направлении вдоль кривой траектории посредством изогнутого рельса 100. Путь качения, и в частности внешняя балка 300 и внутренняя балка 400, не участвуют, по меньшей мере в этом варианте осуществления, в поперечном направлении транспортного средства 200 в поворот.
Внешняя балка 300 и внутренняя балка 400 также поддерживают их несущий канат относительно контура линии, не только в ее расположенных раньше по ходу движения и дальше по ходу движения частях, но также в изогнутой промежуточной части. Внешняя балка 300 и внутренняя балка 400 участвуют в поддержании в воздухе их соответствующего каната. Эти балки 300 и 400 также направляют в поперечном направлении их соответствующий канат вдоль траектории поворота.
Конструкция поворота также содержит механизм отклонения для тягового каната, например ветвь 5A прямого хода по фиг. 1 и 2, между расположенной раньше по ходу движения частью 5A-1 и расположенной дальше по ходу движения частью 5A-2 под наклоном друг к другу в горизонтальной плоскости. Этот механизм отклонения содержит ряд направляющих элементов 500, распределенных вдоль траектории поворота и действующих на промежуточную часть 5A-3 ветви 5A прямого хода тягового каната. Эти элементы 500 участвуют в поддержании и направлении ветви 5A прямого хода в ее контуре линии по меньшей мере на промежуточной части 5A-3.
В данном случае механизм отклонения действует только в горизонтальной плоскости. На входе в поворот и на выходе из него в каждом случае находится опора 600, обычно содержащая один или более роликов, установленных с возможностью вращения, что способствует поддержанию тягового каната в воздухе, в данном случае его удерживанию на несущей конструкции типа конструкции 7 по фиг. 1 и 2.
Внутренняя балка 400, внешняя балка 300, изогнутый рельс 100 и промежуточная часть 5A-3 ветви 5A прямого хода тягового каната проходят в целом параллельно друг другу в повороте.
Рассмотрим фиг. 5.
На входе в поворот (позиция A5) часть ветви 5A прямого хода тягового каната, смежная с в целом прямолинейной расположенной раньше по ходу движения частью 5A-1 этой ветви, или часть 5A-31 входа, направляется вдоль профиля, проходящего по части клотоиды. Часть 5A-31 входа заканчивается в позиции B5 на фиг. 5.
На выходе из поворота (позиция D5) часть ветви 5A прямого хода тягового каната, смежная с в целом прямолинейной расположенной дальше по ходу движения частью 5A-2 этой ветви, или часть 5A-32 выхода, направляется вдоль профиля, проходящего по части клотоиды. Часть 5A-32 выхода начинается в позиции C5 на фиг. 5. В данном случае часть 5A-32 выхода симметрична с частью 5A-31 входа.
Между частью 5A-31 входа и частью выхода 5A-32 соединительная часть 5A-33 ветви 5A прямого хода тягового каната (позиции B5–C5) направляется вдоль профиля, проходящего по дуге окружности. Радиус R0 этой окружности соответствует радиусу профиля клотоиды на конце, смежном с частью 5A-31 входа. Этот радиус R0 также соответствует радиусу профиля клотоиды на конце, смежном с частью 5A-32 выхода. Каждая часть, которая проходит по профилю в виде клотоиды, обеспечивает непрерывный переход между бесконечным радиусом кривизны, соответствующим прямолинейной части выше или дальше по ходу движения, и радиусом кривизны R0 соединительной части 5A-33.
На части 5A-31 входа, части 5A-32 выхода и соединительной части 5A-33, направление ветви 5A прямого хода тягового каната, например, осуществляется посредством элементов типа направляющих элементов 500 по фиг. 3 и 4, распределенных по рассматриваемому профилю.
В данном случае транспортное средство 200 находится в захвате на ветви 5A прямого хода тягового каната посредством крепления 202, которое расположено по сути справа от центра инерции транспортного средства 200. Центр инерции, таким образом, проходит по траектории, подобной профилю тягового каната 5, в частности на повороте.
Изогнутый рельс 100 обеспечивает поперечное направление транспортного средства 200. Изогнутый рельс 100 смещен ортогонально относительно профиля ветви 5A прямого хода тягового каната. Изогнутый рельс 100 направляет транспортное средство 200 в поворот вдоль траектории, так, чтобы центр инерции транспортного средства 200 проходил по профилю ветви 5A прямого хода тягового каната на его изогнутой части 5A-3.
Вблизи одного из своих концов изогнутый рельс 100 содержит первый участок, или участок 102 входа, подобный части 5A-31 входа тягового каната 5. Участок 102 входа в целом имеет форму, проходящую по части псевдо-клотоиды, то есть вдоль кривой, образованной ортогональным смещением части клотоиды. В данном случае рассматриваемая часть клотоиды соответствует профилю в виде клотоиды части 5A-31 входа ветви 5A прямого хода тягового каната. Это ортогональное смещение по сути соответствует ортогональному смещению между ветвью 5A прямого хода тягового каната и изогнутым рельсом 100.
Вблизи другого из своих концов изогнутый рельс 100 содержит второй участок, или участок 104 выхода, подобный части 5A-32 выхода ветви 5A прямого хода тягового каната. Участок 104 выхода в целом имеет форму, проходящую по части псевдо-клотоиды, образованной ортогональным смещением участка 5A-32 выхода ветви 5A прямого хода тягового каната. Участок 102 входа и участок 104 выхода симметричны друг другу.
Между участком 102 входа и участком 104 выхода изогнутый рельс 100 содержит промежуточный участок 106, один конец которого соединен с участком 102 входа, а противоположный конец – с участком 104 выхода. Промежуточный участок 106 подобен соединительной части 5A-33 ветви 5A прямого хода тягового каната. Промежуточный участок 106 имеет форму, проходящую вдоль дуги окружности, образованной ортогональным смещением соединительного участка 5A-33 ветви 5A прямого хода тягового каната.
В данном случае изогнутый рельс 100 продолжен со стороны своего участка 102 входа (раньше по ходу движения от позиции A5) и со стороны своего участка 104 выхода (дальше по ходу движения от позиции D5) первым прямым участком 108 и вторым прямым участком 110 соответственно.
Рельс имеет профилированную форму. Он может быть выполнен по меньшей мере частично посредством сгибания различных радиусов или посредством ковки так, чтобы придать профилю кривизну в соответствии с описанными частями. Он также может быть выполнен посредством сборки элементов, имеющих профили, состыкованные таким образом, чтобы максимально соответствовать рассматриваемым частям. При необходимости по меньшей мере некоторые из этих элементов могут быть изогнуты. Радиус изгибания может быть определен как максимально соответствующий этим частям. По меньшей мере некоторые из этих элементов сами могут иметь профили, образованные с помощью сварки.
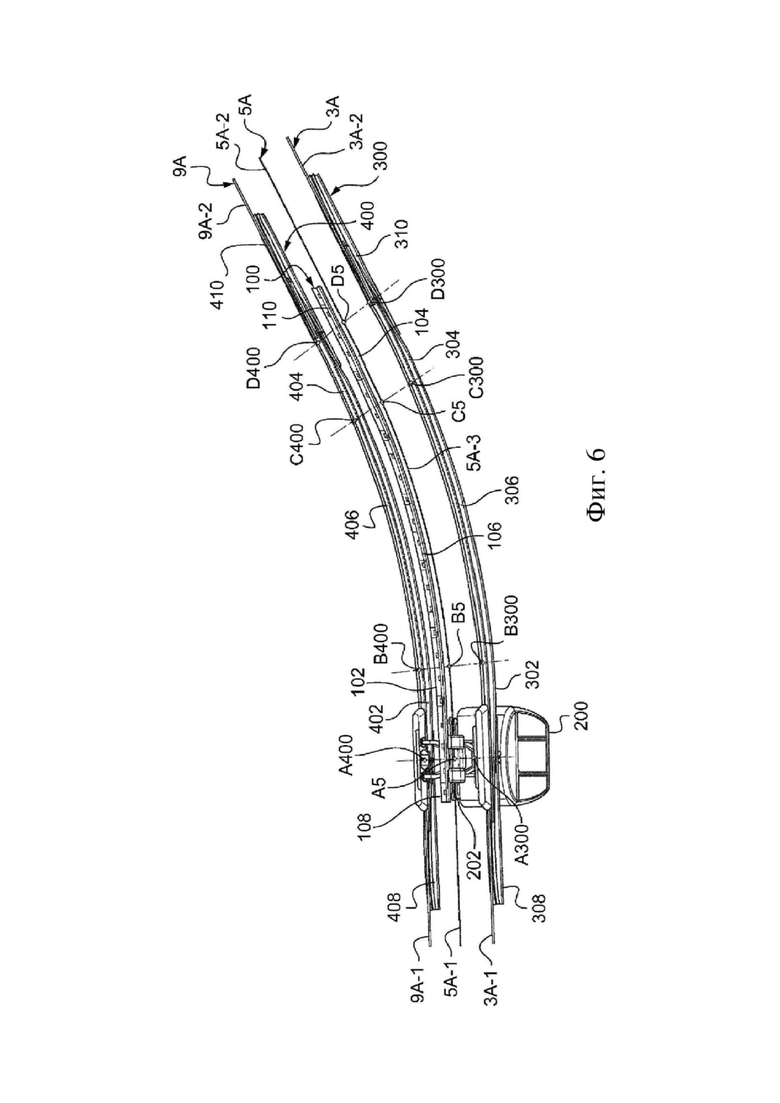
Рассмотрим фиг. 6.
Каждая из внешней балка 300 и внутренней балки 400 содержит участок 302 или 402 входа (позиции A300–B300 для одного и позиции A400–B400 для другого), подобный участку 5A-31 входа ветви 5A прямого хода тягового каната. Каждый участок 302, 402 в целом проходит вдоль части псевдо-клотоиды, то есть вдоль кривой, образованной ортогональным смещением части клотоиды. В данном случае рассматриваемая часть клотоиды соответствует клотоиде участка 5A-31 входа ветви 5A прямого хода тягового каната. Это ортогональное смещение по сути соответствует ортогональному смещению между ветвью 5A прямого хода тягового каната и первым несущим канатом 3A пути прямого хода, с одной стороны, и, с другой стороны, ветвью 5A прямого хода тягового каната и вторым несущим канатом 9A пути прямого хода, выше и дальше по ходу движения от поворота.
Аналогичным образом, каждая из внешней балка 300 и внутренней балки 400 содержит участок 304 или 404 выхода (позиции C300–D300 для одного и позиции C400–D400 для другого), подобный участку 5A-32 выхода ветви 5A прямого хода тягового каната. Каждый участок 304, 404 выхода в целом проходит вдоль части псевдо-клотоиды, образованной ортогональным смещением участка 5A-32 выхода ветви 5A прямого хода тягового каната.
В данном случае каждая из внешней балки 300 и внутренней балки 400 также содержит промежуточный участок 306 или 406 (позиции B300–C300 для одной и позиции B400–C400 для другой), который соединен на одном конце с участком 302 или 402 входа балки, а на противоположном конце с ее участком 304 или 404 выхода. Каждый промежуточный участок 306 или 406 имеет форму, проходящую вдоль дуги окружности, образованной ортогональным смещением соединительного участка 5A-33 ветви 5A прямого хода тягового каната.
В данном случае каждая из внешней балки 300 и внутренней балки 400 продолжена со стороны своего участка 302 или 402 входа (раньше по ходу движения от позиции A300 для одной, и от позиции A400 для другой) и со стороны своего участка 304 или 404 выхода (раньше по ходу движения от позиции D300 для одной и от позиции D400 для другой) первым прямым участком 308 или 408 и вторым прямым участком 310 или 410 соответственно.
Внешняя балка 300 и внутренняя балка 400 могут быть выполнены как изогнутый рельс 100, в частности, посредством изгибания, ковки или сборки из изогнутых элементов.
Рассмотрим фиг. 7–10.
Каждый из первого прямого участка 308 внешней балки 300 и первого прямого участка 408 внутренней балки 400 содержит верхнюю поверхность, на которой различимы два продольных сегмента.
На первом сегменте 412 вблизи расположенной раньше по ходу движения части транспортного пути верхняя поверхность внутренней балки 400 выполнена как опора для каната, в данном случае расположенная раньше по ходу движения часть 9A-1 второго несущего каната 9A пути прямого хода. Первый сегмент 412 выполнен как часть, называемая в данной области техники несущим башмаком. Верхняя поверхность первого сегмента 412 выполнена в форме половины дуги, которая поднимается в направлении расположенной дальше по ходу движения части пути.
На втором сегменте 414, смежном с первым сегментом 412 и удаленном от расположенной раньше по ходу движения части пути, внутренняя балка 400 выполнена с возможностью постепенного отклонения вниз второго несущего каната 9A на верхней поверхности этого второго сегмента 414. Эта верхняя поверхность второго сегмента также выполнена как поверхность качения для транспортного средства 200.
Первый прямой участок 408 внутренней балки 400 выполнен в данном случае из удлиненного элемента 416 балки. Часть этого элемента, которая соответствует второму сегменту 414, содержит верхнюю поверхность, выполненную в виде наклонной плоскости, спускающейся от соответствующей верхней поверхности к первому сегменту 412.
На частях, соответствующих первому сегменту 412 и второму сегменту 414, элемент 416 балки содержит в верхней поверхности оснастку 418 каната, в которой размещен второй несущий канат 9A. Второй несущий канат 9A проходит по сути вдоль верхней поверхности элемента 416 балки.
В средней зоне наклонной плоскости этот элемент 416 балки соединен с концом остальной части внутренней балки 400, обеспечивая проход для второго несущего каната 9A. Для этого конец остальной части внутренней балки 400 имеет форму скоса. Второй несущий канат 9A следует за элементом 416 балки, который подводит его к нижней поверхности внутренней балки 400. Там направляющие элементы 419 в виде сегментов оснастки каната поддерживают промежуточную часть 9A-3 второго несущего каната 9A в части поворота его контура линии.
Верхняя поверхность внутренней балки 400 содержит площадку 420 качения, которая в данном случае покрывает по меньшей мере частично верхнюю поверхность одного или более профилированных элементов, собранных для формирования по меньшей мере частично внутренней балки 400. На одном из своих концов эта площадка 420 прерывается вблизи вершины первого сегмента 412. Там верхняя поверхность площадки 420 проходит вдоль плоскости, слегка наклонной и приподнятой по мере перемещения к расположенному раньше по ходу движения концу второго сегмента 414. Вблизи этого конца верхняя поверхность площадки качения достигает своей вершины, то есть отметки своей постоянной высоты вдоль поворота. От этой вершины к концу остальной части внутренней балки площадка 420 проходит на одной и той же высоте. В примере варианта осуществления, показанном в данном случае, площадка 420 выполнена в виде нескольких участков, а именно первого участка 420-1, который по сути соответствует первому элементу 416 балки, второго участка 420-2, который по сути соответствует второму элементу балки, подобному первому элементу 416 балки для второго прямого участка 410, и третьего участка 420-3, который проходит на самой большой части внутренней балки 400 и соединен с ее первым участком 420-1 площадки 420 и вторым участком 420-2.
Вдоль первого участка 420-1 площадки 420 два уголка 421 перехода, выполненные симметрично с обеих сторон оснастки 418 каната, содержат на своей соответствующей вершине узкую, по сути горизонтальную поверхность качения.
Внешняя балка 300 выполнена подобной внутренней балке 400. Элементы внешней балки обозначены позициями, подобными позициям элементов внутренней балки 400, но на сотню меньшими.
Когда транспортное средство 200 входит в зацепление с конструкцией 7 поворота, оно катится сначала по расположенным раньше по ходу движения частям 3A-1 и 9A-2 первого несущего каната 3A и второго несущего каната 9A пути прямого хода посредством основных роликов (не показаны на данных фигурах). Эти расположенные раньше по ходу движения части поддерживаются первыми прямыми участками 308 и 408 внешней балки 300 и внутренней балки 400 соответственно, пока вблизи расположенного раньше по ходу движения конца вторых сегментов 314 и 414, обода этих основных роликов не окажутся вровень с поверхностями качения уголков 321 и 421 перехода. По мере того как транспортное средство 200 продвигается вдоль вторых сегментов 314 и 414, основные ролики выходят из зацепления с первым несущим канатом 3A и вторым несущим канатом 9A пути прямого хода, вследствие того, что последние постепенно отклоняются вниз. Таким образом, транспортное средство 200 катится по уголкам 321 и 421 перехода, пока вблизи расположенного дальше по ходу движения конца вторых сегментов 314 и 414, дополнительные ролики транспортного средства 200 (не показаны на данных фигурах) не окажутся вровень со слегка наклонной плоскостью первых участков 320-1 и 420-1 площадок 320 и 420 качения. Начиная оттуда, и через промежуточные участки 306 и 406 внешней балки 300 и внутренней балки 400, транспортное средство 200 катится на площадках 320 и 420 качения посредством этих дополнительных роликов. Второй сегмент 314 первого прямолинейного сегмента 308 внешней балки 300, и подобный ему сегмент 414 внутренней балки 400, образуют зону перехода между качением транспортного средства 200 на несущих канатах и качением по пути, образованному остальной частью внешней балки 300 и внутренней балки 400. В отличие от качения на несущих канатах, при котором канавка основных роликов направляет транспортное средство 200 вдоль этих канатов, качение по пути внешней балки 300 и внутренней балки 400 свободно в поперечном направлении. Направление транспортного средства 200 в поперечном направлении обеспечивается изогнутым рельсом 100. Важно, что транспортное средство 200 входит в зацепление с изогнутым рельсом 100 по сути в момент, когда оно выходит из зацепления с несущими канатами. Поэтому изогнутый рельс 100 начинается вблизи того места, где несущие канаты отклоняются вниз на первых прямолинейных участках 308 и 408.
Вторые прямолинейные участки 310 и 410 внешней балки 300 и внутренней балки 400 выполнены подобными и симметричными первым прямолинейным участкам 308 и 408 этих балок. Таким образом, в конце поворота транспортное средство 200 снова входит в зацепление с несущими канатами.
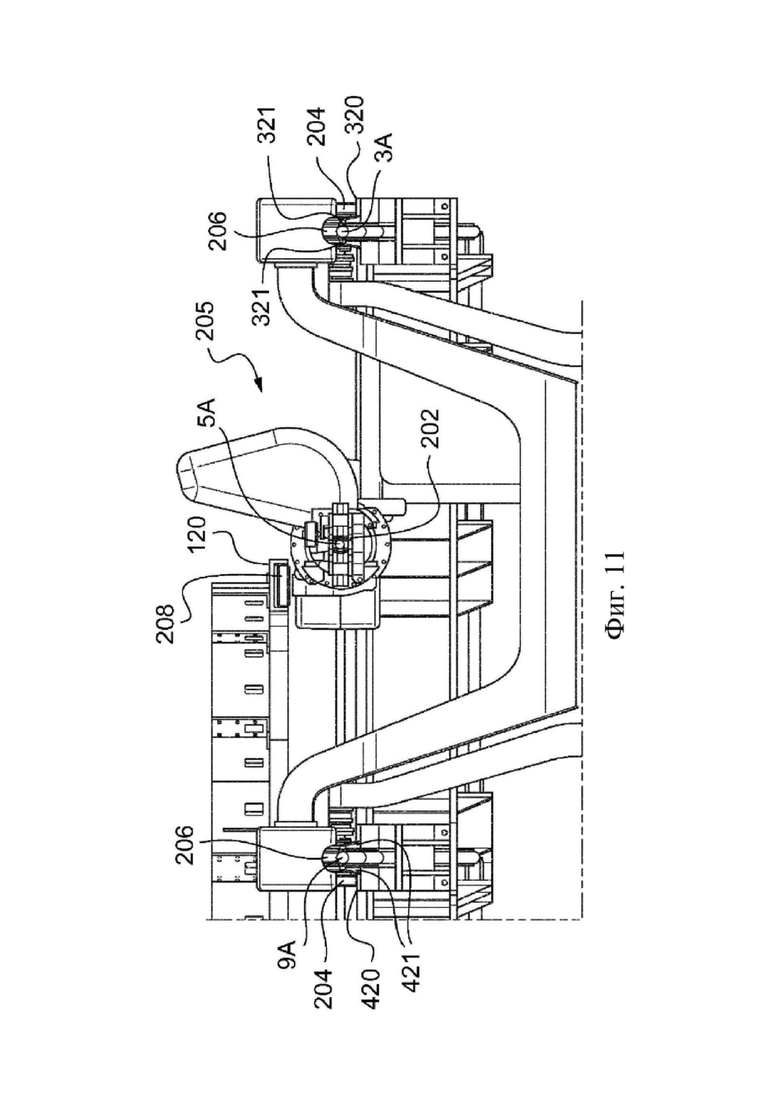
Рассмотрим фиг. 11.
На ней показана верхняя часть, или шасси 205, транспортного средства 200, посредством которой обеспечивается связь транспортного средства 200 с несущими канатами, в данном случае первым несущим канатом 3A и вторым несущим канатом 9A пути прямого хода, и тяговым канатом, в данном случае его ветвью 5A прямого хода.
Шасси 205 содержит пару дополнительных роликов 204, каждый из которых катится в данном случае по площадке 320 или 420 качения, соответственно, внешней балки 300 и внутренней балки 400. Шасси 205 также содержит пару основных роликов 206, каждый из которых входит в зацепление с одним из первого несущего каната 3A и второго несущего каната 9A пути прямого хода. Шасси 205 также содержит зажим 202 для соединения с ветвью 9A прямого хода тягового каната.
Вблизи зажима 202 шасси 205 содержит направляющий ролик 208, установленный с возможностью вращения. Этот направляющий ролик 208 входит в зацепление с продольным желобом 120 изогнутого рельса 100. Этот желоб 120 проходит вдоль общего направления изогнутого рельса 100, в данном случае вдоль двух участков в виде частей псевдо-клотоиды, соединенных между собой участком в виде дуги окружности. Именно это зацепление направляющего ролика 208 с желобом 120 позволяет осуществлять направление транспортного средства 200 в поперечном направлении на повороте.
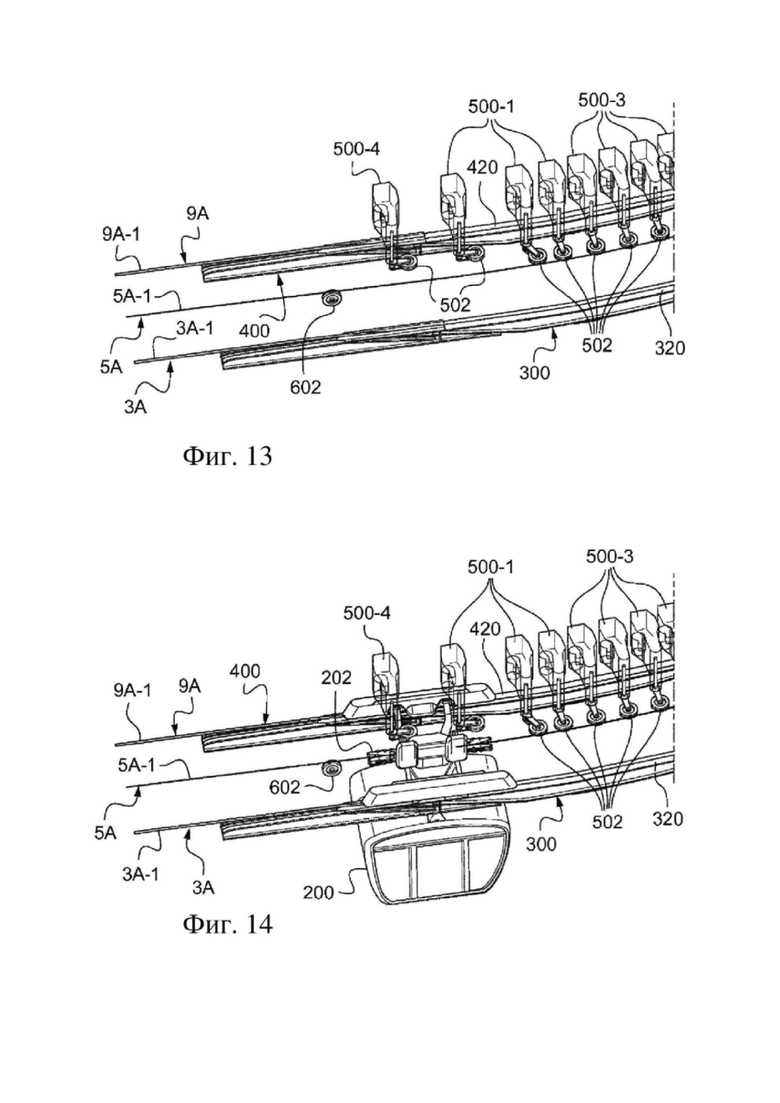
Рассмотрим фиг. 12.
Каждый направляющий элемент 500 тягового каната, в данном случае его ветви 5A прямого хода, содержит соответствующий вращающийся ролик 502, с которым входит в зацепление тяговый канат. Направляющие элементы 500 установлены на несущей конструкции, которая не показана, с распределением на повороте. Эти элементы 500 расположены на несущей конструкции таким образом, чтобы их соответствующая точка 504 контакта с ветвью 5A прямого хода несущего каната располагалась вдоль определенного профиля. Этот профиль соответствует профилю, описанному для ветви 5A прямого хода тягового каната, в частности, в связи с фиг. 7.
Таким образом, предусмотрен первый подузел 500-1 элементов 500, распределенных с возможностью направления ветви 5A прямого хода тягового каната на части 5A-31 входа, второй подузел 500-2 элементов 500, распределенных с возможностью направления ветви 5A прямого хода на части 5A-32 выхода, и третий подузел 500-3 элементов 500, распределенных с возможностью направления в горизонтальном направлении ветви 5A прямого хода на соединительной части 5A-33. В данном случае также предусмотрена пара направляющих элементов 500-4, расположенных раньше по ходу движения и дальше по ходу движения от поворота. Направление по вертикали обеспечивается по меньшей мере частично посредством расположенного раньше по ходу движения ролика 602 и расположенного дальше по ходу движения ролика 604.
Благодаря такому распределению направляющих элементов 500 ветвь 5A прямого хода тягового каната направляется в поворот вдоль профиля, в целом проходящего по части клотоиды на входе и части клотоиды на выходе, причем эти части соединены между собой частью в виде дуги окружности. Между двумя смежными направляющими элементами 500 ветвь 5A прямого хода каната проходит по прямолинейному профилю. Ветвь 5A прямого хода тягового каната проходит в целом по траектории центра инерции транспортного средства, посредством сегментов, концы которых расположены вдоль этой траектории.
Рассмотрим фиг. 13 и 14.
По мере продвижения транспортного средства 200 в поворот ролики 502 направляющих элементов 500 поочередно убираются для возможности прохождения шасси 205 транспортного средства 200. Таким же образом, эти ролики 502 поочередно возвращаются на свое место после прохождения шасси 205.
Убирание каждого ролика 502 обеспечивается соответствующим механизмом внутри соответствующего направляющего элемента 500. В данном случае этот механизм действует для убирания роликов 502 в соответствии с по сути вращательным движением. Как вариант, этот механизм убирает ролики 502 в соответствии с поступательным движением. Такой механизм описан, например, в документе FR 3050425, приведенном исключительно в качестве неограничивающего примера.
Описание фиг. 3–14, выполненное выше в отношении пути прямого хода подвесной канатной транспортной линии, подобным образом, справедливо и для пути обратного хода этой линии. Во всех возможных случаях на этих фигурах элементы пути обратного хода обозначены со ссылками на подобные им элементы пути прямого хода в соответствующих случаях с заменой на этих ссылках литеры «A» литерой «B».
Рассмотрим фиг. 15.
Первая кривая 180 представляет траекторию центра инерции транспортного средства, например транспортного средства 200, описанного в связи с предыдущими фигурами, вдоль поворота. Ось x соответствует общему направлению пути раньше по ходу движения от поворота, по меньшей мере вблизи поворота. Ось y перпендикулярна оси x в горизонтальной плоскости.
На этой первой кривой 180 различима первая часть 181, позиции A–B, в форме части клотоиды, соответствующей траектории транспортного средства на участке входа в поворот, и вторая часть 182, позиции C–D, симметричная первой части 181. Эта вторая часть соответствует траектории транспортного средства на участке выхода из поворота. Между позициями B и C третья часть 183 в виде дуги окружности соответствует траектории транспортного средства на соединительном участке поворота, между участком входа и выхода. Позиция E соответствует точке хорды поворота.
Для сравнения показана вторая кривая 185, выполненная пунктиром, представляющая воображаемую траекторию в виде дуги окружности для аналогичного поворота (с тем же местом входа, тем же местом выхода).
Рассмотрим фиг. 16.
Третья кривая 190 представляет изменение угла Agi отклонения, выраженного в градусах, от центра тяжести транспортного средство в зависимости от времени t, выраженного в секундах. Транспортное средство перемещается в данном случае с постоянной скоростью. Эта скорость может быть номинальной скоростью тягового каната или пониженной скоростью. В качестве примера, ее величина составляет порядка нескольких метров в секунду, обычно от 2 метров в секунду до 8 метров в секунду.
Эта третья кривая 190 содержит первую часть 191, позиции A–B, и вторую часть 192, позиции C–D, которые соответствуют участку входа в поворот и участку выхода из поворота соответственно. Третья часть 193, позиции B–C, соответствует соединительному участку.
Угол Agi отклонения изменяется симметрично на первой части 191 и на второй части 192. На третьей части 193 угол Agi отклонения изменяется линейно. Такое изменение характерно для траектории в виде дуги окружности, описанной при постоянной скорости.
В позиции B угол отклонения достигает значения Альфа, которое соответствует наклону относительно друг друга путей раньше по ходу движения и дальше по ходу движения от поворота.
Рассмотрим фиг. 17.
Четвертая кривая 200 здесь представляет изменение радиуса кривизны R, выраженного в метрах, кривой траектории центра тяжести транспортного средства в зависимости от расстояния d, пройденного от входа в поворот, выраженного в метрах.
Эта четвертая кривая 200 содержит первую часть 201, до позиции B, и вторую часть 202, от позиции C, которые соответствуют участку входа в поворот и участку выхода из поворота соответственно. Третья часть 203, позиции B–C, соответствует соединительному участку.
Отмечается отсутствие позиций A–B, обе из которых сведены к бесконечности, поскольку раньше по ходу движения и дальше по ходу движения от поворота транспортное средство проходит по прямолинейной траектории. Первая часть 201 и вторая часть 202 проявляют свойство траектории в виде клотоиды, которая способствует возможности непрерывного перехода между бесконечным радиусом кривизны и конечным значением радиуса, в данном случае значением R0.
Третья часть 203 демонстрирует постоянство радиуса кривизны на соединительном участке, характерное для траектории в виде дуги окружности. На этой третьей части 203 радиус кривизны равен значению R0, которое соответствует радиусу кривизны в конце части клотоиды (первая часть 201) и в начале части клотоиды (вторая часть 202).
Рассмотрим фиг. 18.
Пятая кривая 210 здесь представляет изменение, от входа в поворот (позиция A), бокового ускорения Ace транспортного средства, выраженного в g (9,8 метров на секунду в квадрате), в центре тяжести транспортного средства в зависимости от времени t, выраженного в секундах. Транспортное средство перемещается с постоянной скоростью.
Эта пятая кривая 210 содержит первую часть 211, позиции A–B, и вторую часть 212, позиции C–D, которые соответствуют участку входа в поворот и участку выхода из поворота соответственно. Третья часть 213, позиции B–C, соответствует соединительному участку.
Первая часть 211 и вторая часть 212 демонстрируют, что на частях клотоиды, транспортное средство подвергается ускорению, которое увеличивается и, соответственно, уменьшается. Третья часть 213 демонстрирует постоянство ускорения Acc, когда транспортное средство проходит через часть в виде дуги окружности.
Боковое ускорение транспортного средства остается меньше максимального значения ускорения Amax вдоль поворота. Это значение Amax вытекает, например, из нормативных требований.
Рассмотрим фиг. 22.
Шестая кривая 220 здесь представляет изменение во времени рывка Jrk, то есть производную по времени бокового ускорения Acc, выраженного в g в секунду (9,8 метров на секунду в кубе), в центре тяжести транспортного средства, от входа в поворот (позиция A) до выхода из него (позиция D). Транспортное средство перемещается с постоянной скоростью.
Эта шестая кривая 220 содержит первую часть 221, позиции A–B, и вторую часть 222, позиции C–D, которые соответствуют участку входа в поворот и участку выхода из поворота соответственно. Третья часть 223, позиции B–C, соответствует соединительному участку.
Первая часть 221 и вторая часть 222 демонстрируют, что на частях клотоиды транспортное средство подвергается постоянному рывку. Третья часть 223 демонстрирует что рывок равен нулю, когда транспортное средство проходит через часть в виде дуги окружности.
Это постоянство рывка на частях клотоиды особенно полезно для определения размеров конструкции поворота. Оно позволяет соблюдать нормы в отношении предельных значений рывка или бокового ускорения, максимально приближаясь к этим значениям. Это позволяет спроектировать траекторию поворота, через который можно быстро пройти, с соблюдением действующих норм. Это также можно рассматривать как способ оптимизации расстояния, которое необходимо пройти, чтобы перейти от одного прямолинейного участка к другому прямолинейному участку, наклоненному горизонтально по отношению к первому, для данных угла наклона и скорости прохождения транспортных средств.
По меньшей мере теоретически, участок траектории в виде дуги окружности, который соединяет участки в частях клотоиды, является необязательным. Тем не менее, эта часть представляет интерес с точки зрения комфорта пассажиров транспортного средства. Ее можно выгодно спроектировать так, чтобы постоянное значение бокового ускорения, достигнутое на промежуточной части 213 кривой 210, соответствовало предельному значению ускорения, допустимому для пассажиров, например значению Amax.
На фиг. 15–17 также показана промежуточная траектория в виде дуги окружности, полезная для выполнения направляющих элементов и элементов качения конструкции. В этой части дуги окружности поворот будет более коротким, но, например, не будет хватать места для убирания роликов 502 направляющих элементов 500, при этом последние должны в целом соответствовать предельному значению угла отклонения элементов тягового каната на каждом ролике 502.
Приведенное выше описание относится к случаю отклонения пути, проходящего в целом в горизонтальной плоскости, в частности, когда часть пути раньше по ходу движения от поворота и часть пути дальше по ходу движения от поворота оказываются по сути на одной высоте. Таким образом, направление транспортного средства предпочтительно происходит в одной плоскости, в частности в горизонтальной плоскости.
В некоторых случаях может быть желательно увеличить или уменьшить высоту транспортного средства на повороте, например, когда транспортный путь проходит по краю горы. Затем настоящее изобретение предусматривает, что транспортное средство направляется по траектории, плоской или нет, которая в проекции на плоскость, например горизонтальную плоскость или среднюю плоскость, по меньшей мере частично проходит по части клотоиды.
Теперь будет описан способ построения этой средней плоскости.
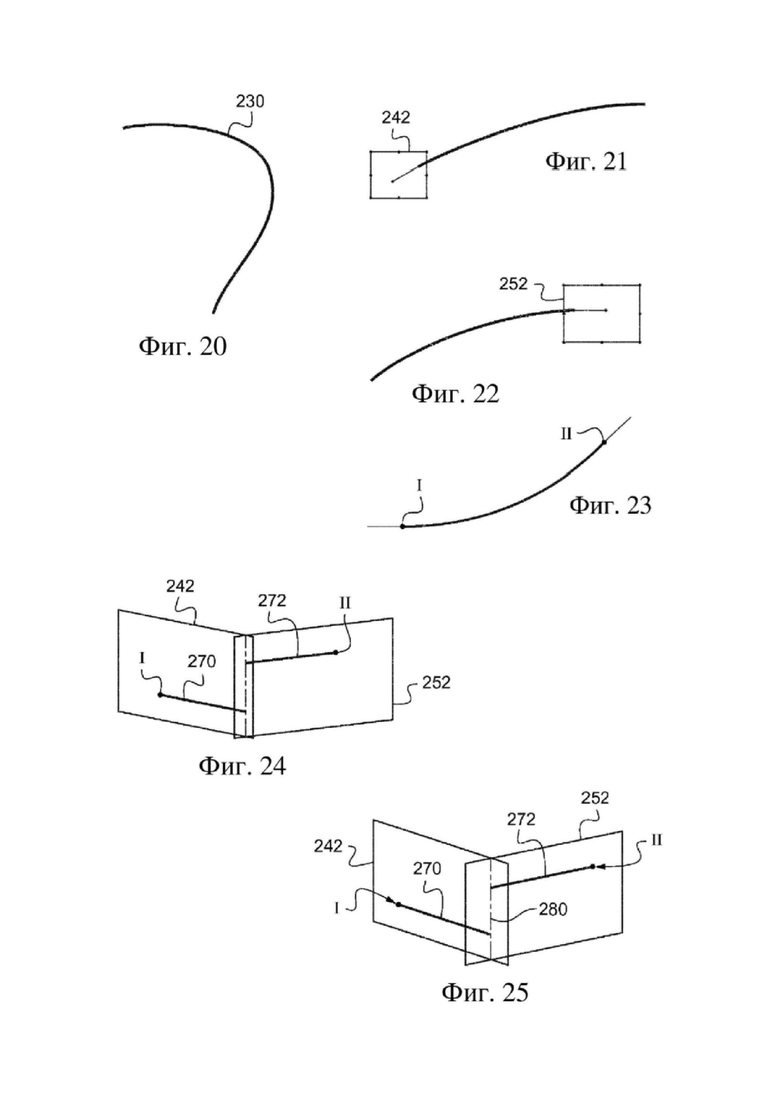
Рассмотрим фиг. 20.
Рассмотрим кривую 230, представляющую любой поворот в пространстве.
Рассмотрим фиг. 21.
Кривая 240 представляет поворот, соответствующий кривой 230 на первой вертикальной плоскости 242. Различима часть 244, которая представляет участок вертикального отклонения, или расположенный дальше по ходу движения участок конца, расположенного в этой первой вертикальной плоскости 242. Эта первая вертикальная плоскость 242 соответствует плоскости расположенной дальше по ходу движения несущей поверхности канатов.
Рассмотрим фиг. 22.
Кривая 250 представляет поворот, соответствующий кривой 230 на второй вертикальной плоскости 252. Различима часть 254, которая представляет участок вертикального отклонения раньше по ходу движения, или расположенный раньше по ходу движения участок конца, расположенного в этой второй вертикальной плоскости 252. Эта вторая вертикальная плоскость 252 соответствует плоскости расположенной раньше по ходу движения несущей поверхности канатов.
Рассмотрим фиг. 23.
Кривая 260 представляет поворот в проекции на плоскость, перпендикулярную оси z, следовательно, горизонтальную плоскость.
Между позициями I и II различима часть 262, представляющая участок отклонения в поперечном направлении или центральный участок. Этот участок расположен вне плоскости проекции. Этот участок может быть не плоским или расположенным в какой-либо плоскости.
Позиция I обозначает точку границы между расположенным дальше по ходу движения участком конца и центральным участком. Позиция II обозначает точку границы между центральным участком и расположенным раньше по ходу движения участком.
Рассмотрим фиг. 24.
Для каждого расположенного раньше по ходу движения и дальше по ходу движения участка конца, начиная с точки позиции I, соответственно с точки позиции II, можно проследить первую горизонтальную прямую 270 в первой вертикальной плоскости 242, соответственно вторую горизонтальную прямую 272 во второй вертикальной плоскости 252.
Первая горизонтальная прямая 270 и вторая горизонтальная прямая 272 не пересекаются.
Рассмотрим фиг. 25.
Можно проследить вертикальный сегмент 280, который взаимно соединен с первой горизонтальной прямой 270 и второй горизонтальной прямой 272. Длина вертикального сегмента 280 представляет минимальное геометрическое расстояние между первой горизонтальной прямой 270 и второй горизонтальной прямой 272. Это расстояние представляет перепад между точкой позиции I и точкой позиции II. Это перепад центрального участка, в некотором смысле, перепад поворота.
Рассмотрим фиг. 26.
Можно соединить точку позиции I и точку позиции II друг с другом первой наклонной прямой 290 в первой вертикальной плоскости 242 и второй наклонной прямой 292 во второй вертикальной плоскости 252 таким образом, чтобы первый угол 294 между первой наклонной прямой 290 и первой горизонтальной прямой 270 был равен второму углу 296 между второй наклонной прямой 292 и второй горизонтальной прямой 272.
Первая наклонная прямая 290 и вторая наклонная прямая 292 соединяются между собой в точке (позиция III) вертикального сегмента 280.
Рассмотрим фиг. 27 и 28.
Средняя плоскость 300 определяется как плоскость, проходящая через точки позиций I, II и II.
Именно в этой средней плоскости 300 или в горизонтальной плоскости должен проецироваться участок отклонения в поперечном направлении для проверки того, что эта проекция на плоскость по меньшей мере частично имеет форму части клотоиды.
Описана подвесная конструкция, которая соединена, соответственно, с расположенным раньше по ходу движения участком и расположенным дальше по ходу движения участком подвесной канатной транспортной линии, и содержит по меньшей мере одну активную поперечную направляющую по меньшей мере на части линии между входом и выходом, причем эта часть проходит в целом вдоль части клотоиды или псевдо-клотоиды по меньшей мере в проекции на среднюю плоскость.
В описанном примере варианта осуществления именно тяговый канат направляется вдоль профиля в форме части клотоиды. Несущие канаты направляются вдоль любого профиля, поскольку между входом в поворот и выходом из него транспортные средства катятся по пути качения, образованному внешними и внутренними балками. Важно то, что вдоль поворота центр тяжести транспортного средства проходит через части в форме клотоиды продуманной конструкции, которые позволяют переходить от бесконечного радиуса кривизны к определенному радиусу кривизны с соблюдением при этом предельных значений рывка и/или бокового ускорения. Когда зажим, который соединяет транспортное средство с тяговым канатом находится по сути справа от центра инерции этого транспортного средства, это приводит к направлению этого каната вдоль частей клотоиды. В случае поперечного смещения этот канат следует направить вдоль части псевдо-клотоиды, которая выводится из воображаемой кривой ортогонального смещения, соответствующей поперечному смещению между зажимом и центром тяжести.
Описана направляющая, действующая на шасси транспортного средства. Альтернативно или дополнительно можно предусмотреть направляющую транспортного средства, которая бы действовала исключительно посредством направления тягового каната. Рассматриваемая направляющая также может действовать в отношении транспортного средства в продолжении расположенных раньше по ходу движения частей одного или более несущих канатов, например, с поперечной направляющей, предусмотренной на пути качения.
Описана установка с двумя несущими канатами, но настоящее изобретение одновременно переносится на случай установки с одним несущим канатом или даже моноканатной установки.
Описана конструкция подвесного поворота, удерживаемая на стойках. Как вариант, она может быть встроена в станцию или же подвешена без необходимости использования стоек.
В одном варианте осуществления конструкции поворота, описанной выше, каждое транспортное средство выходит из захвата тягового каната на входе в поворот или раньше по ходу движения от этого входа и возвращается в захват этого каната на выходе из поворота или дальше по ходу движения от этого выхода. Например, зажим или крепление транспортного средства отсоединяется от тягового каната, а затем снова соединяется с этим тяговым канатом. На повороте транспортное средство может направляться в поперечном направлении, аналогично тому, как описано выше, в частности, с помощью изогнутого рельса и/или внешней и внутренней балок. Вдоль поворота тяговый канат может отклоняться по меньшей мере в поперечном направлении, независимо от траектории транспортного средства, вдоль любого профиля.
Описаны части в форме клотоиды или псевдо-клотоиды. Клотоида характеризуется кривизной, которая изменяется линейно с криволинейной абсциссой, в частности, между прямой линией и данным значением кривизны. Он также характеризуется радиусом кривизны, который меняется линейно с обратным значением этой криволинейной абсциссы. Рассматриваемые части могут в более широком смысле иметь форму частей в виде любой кривой из множества радиоид, или укороченной части радиоиды, или псевдо-радиоиды. В радиоидах кривизна, то есть обратное значение радиуса кривизны, непрерывно изменяется с криволинейной абсциссой, в частности, между прямой линией и данным значением кривизны.
Описана подвесная конструкция для установки канатной дороги двухканатного типа, содержащая по меньшей мере одну активную направляющую транспортного средства по меньшей мере в поперечном направлении по меньшей мере на первой части изогнутого промежуточного участка, причем эта первая часть проходит в целом вдоль части радиоиды или псевдо-радиоиды по меньшей мере в проекции на горизонтальную плоскость или среднюю плоскость, содержащую этот вход и этот выход, в комбинации с по меньшей мере одной активной направляющей тягового каната между входом и выходом, способной отклонять этот канат по меньшей мере в поперечном направлении на первой части изогнутого промежуточного участка, и активной направляющей одного или более несущих канатов, также между входом и выходом, способной отклонять этот канат по меньшей мере в поперечном направлении на первой изогнутой промежуточной части.
Будет понятно, что настоящее изобретение существует, когда эти направляющие тягового каната и одного или более несущих канатов сочетаются на изогнутом участке пути движения, независимо от формы этого участка. Таким образом, подвесная конструкция отличается от конструкций, в которых предусмотрено один или более первых несущих канатов раньше по ходу движения от изогнутого промежуточного участка и один или более вторых несущих канатов дальше по ходу движения от этого участка, причем эти канаты соответственно прикреплены к земле на входе и на выходе конструкции. Подвесные конструкции этого типа имеют недостаток, заключающийся в необходимости использования больших и дорогих анкерных блоков, а также фундаментов с соответствующими размерами. Напротив, усилия, которые канаты прикладывают к конструкции, остаются локализованными в вершине конструкции, что позволяет избежать использования таких анкеров. Результирующее усилие со стороны канатов, направленное вдоль радиальной оси описанной кривой, уравновешивается оптимизированной конструктивной схемой. Полученный в результате захват на земле очень слабый. Также допустимо скольжение одного или более несущих канатов вдоль продольной оси линии, при этом указанное скольжение необходимо для изменений температуры и продления срока эксплуатации каната.
Иными словами, другой аспект настоящего изобретения относится к подвесной конструкции для установки канатной дороги, содержащей тяговый канат и по меньшей мере один несущий канат, при этом конструкция содержит вход и выход, соединенные соответственно с в целом прямолинейными расположенным раньше по ходу движения участком и расположенным дальше по ходу движения участком транспортного пути установки канатной дороги, при этом конструкция поддерживает изогнутый промежуточный участок по меньшей мере в проекции на горизонтальную плоскость транспортного пути между входом и выходом, а также содержит по меньшей мере одну активную направляющую транспортного средства по меньшей мере в поперечном направлении по меньшей мере на части изогнутого промежуточного участка, по меньшей мере одну активную направляющую тягового каната между входом и выходом, способную отклонять этот канат по меньшей мере в поперечном направлении на части изогнутого промежуточного участка, и по меньшей мере одну активную направляющую несущего каната между входом и выходом, способную отклонять этот канат по меньшей мере в поперечном направлении на этой части изогнутого промежуточного участка.
Необязательные, дополнительные и альтернативные характеристики этой подвесной конструкции следующие:
- направляющая транспортного средства содержит изогнутый рельс, проходящий по меньшей мере частично по рассматриваемой части изогнутого промежуточного участка;
- транспортные средства линии входят в зацепление с изогнутым рельсом между входом и выходом;
- конструкция также содержит активный путь качения для транспортных средств линии между входом и выходом;
- по меньшей мере часть этого пути качения проходит в целом вдоль по меньшей мере части изогнутого промежуточного участка;
- путь качения содержит по меньшей мере одну балку, проходящую по меньшей мере частично вдоль изогнутого промежуточного участка;
- путь качения содержит по меньшей мере одну зону перехода с расположенным раньше по ходу движения участком несущего каната и/или расположенным дальше по ходу движения участком этого каната;
- направляющая тягового каната содержит несколько элементов, распределенных вдоль по меньшей мере части изогнутого промежуточного участка;
- по меньшей мере определенные направляющие элементы тягового каната убираются с линии при прохождении транспортных средств.
Также предусмотрена подвесная канатная транспортная установка, содержащая по меньшей мере одну такую конструкцию.
Настоящее изобретение не ограничивается вариантами осуществления, описанными выше исключительно в качестве примеров, а охватывает любые варианты, которые может предусмотреть специалист в данной области техники.







Изобретение относится к подвесной конструкции для установки канатной дороги типа, содержащего по меньшей мере один тяговый канат. Конструкция содержит вход и выход, соединенные, соответственно, с в целом прямолинейными расположенным раньше по ходу движения участком (3A-1; 5A-1; 9A-1) и расположенным дальше по ходу движения участком (3A-2; 5A-2; 9A-2) пути транспортировки установки канатной дороги. Конструкция поддерживает промежуточный участок, изогнутый по меньшей мере в проекции на горизонтальную плоскость пути транспортировки между входом и выходом. Конструкция дополнительно содержит одну активную направляющую транспортного средства по меньшей мере в поперечном направлении на первой части (A; B) изогнутого промежуточного участка (3A-3; 5A-3; 9A-3), при этом указанная первая часть (A; B) проходит в целом вдоль части радиоиды или кривой, образованной ортогональным смещением части радиоиды, по меньшей мере в проекции на горизонтальную плоскость или среднюю плоскость, содержащую указанный вход и указанный выход, и одну активную направляющую тягового каната между входом (A) и выходом (D), выполненную с возможностью отклонения указанного каната по меньшей мере в поперечном направлении. В результате установка канатной дороги может использоваться в городской или пригородной среде, транспортные средства канатной дороги могут быстро перемещаться по линии без ущерба для комфорта пассажиров. 2 н. и 15 з.п. ф-лы, 28 ил.
1. Подвесная конструкция (7) для установки канатной дороги типа, содержащего по меньшей мере один тяговый канат, при этом конструкция содержит вход (A) и выход (D), предусмотренный для соединения, соответственно, с в целом прямолинейными расположенным раньше по ходу движения участком (3A-1; 5A-1; 9A-1) и расположенным дальше по ходу движения участком (3A-2; 5A-2; 9A-2) пути транспортировки установки канатной дороги, а также промежуточный участок, соединенный с входом (A) и выходом (D), при этом промежуточный участок (3A-3; 5A-3; 9A-3) изогнут по меньшей мере в проекции на горизонтальную плоскость между входом (A) и выходом (D),
отличающаяся тем, что конструкция также содержит:
- по меньшей мере одну активную направляющую транспортного средства по меньшей мере в поперечном направлении на первой части (A; B) по меньшей мере изогнутого промежуточного участка (3A-3; 5A-3; 9A-3), при этом указанная первая часть (A; B) проходит в целом вдоль части радиоиды или кривой, образованной ортогональным смещением части радиоиды, по меньшей мере в проекции на горизонтальную плоскость или среднюю плоскость, содержащую указанный вход и указанный выход, и
- по меньшей мере одну активную направляющую тягового каната между входом (A) и выходом (D), выполненную с возможностью отклонения указанного каната по меньшей мере в поперечном направлении между указанным входом (A) и указанным выходом (D).
2. Конструкция по п. 1, отличающаяся тем, что направляющая тягового каната выполнена с возможностью направления этого каната вдоль первой части (A; B) изогнутого промежуточного участка (3A-3; 5A-3; 9A-3).
3. Конструкция по любому из пп. 1 или 2, отличающаяся тем, что направляющая транспортного средства также действует на вторую часть (C; D) по меньшей мере изогнутого промежуточного участка (3A-3; 5A-3; 9A-3), и каждая из первой части (A; B) и второй части (C; D) проходит в целом вдоль части радиоиды или кривой, образованной ортогональным смещением части радиоиды, по меньшей мере в проекции на среднюю плоскость или горизонтальную плоскость.
4. Конструкция по п. 3, отличающаяся тем, что направляющая тягового каната выполнена с возможностью направления этого каната вдоль второй части (C; D) изогнутого промежуточного участка (3A-3; 5A-3; 9A-3).
5. Конструкция по любому из пп. 3 или 4, отличающаяся тем, что первая часть (A; B) и вторая часть (C; D) промежуточного участка (3A-3; 5A-3; 9A-3) отделены друг от друга промежуточной частью (B; C), и эта промежуточная часть (B; C) проходит вдоль части окружности по меньшей мере в проекции на среднюю плоскость или горизонтальную плоскость, и указанная направляющая действует на эту промежуточную часть.
6. Конструкция по любому из пп. 3–5, отличающаяся тем, что первая часть (A; B) и вторая часть (C; D) промежуточного участка (3A-3; 5A-3; 9A-3) проходят в целом симметрично друг другу.
7. Конструкция по любому из предыдущих пунктов, отличающаяся тем, что указанная первая часть (A; B) расположена вблизи указанного входа (A).
8. Конструкция по любому из предыдущих пунктов, отличающаяся тем, что содержит по меньшей мере одну активную направляющую несущего каната между входом (A) и выходом (D), выполненную с возможностью отклонения указанного каната по меньшей мере в поперечном направлении между указанным входом (A) и указанным выходом (D).
9. Конструкция по п. 8, отличающаяся тем, что направляющая тягового каната выполнена с возможностью перемещения этого каната по меньшей мере в поперечном направлении вдоль первой части (A, B) изогнутого промежуточного участка (3A-3; 5A-3; 9A-3).
10. Конструкция по любому из предыдущих пунктов, отличающаяся тем, что направляющая транспортного средства содержит изогнутый рельс (100), проходящий по меньшей мере частично вдоль части радиоиды или кривой, образованной ортогональным смещением части радиоиды, по меньшей мере в проекции на среднюю плоскость или горизонтальную плоскость на первой части (A; B) по меньшей мере изогнутого промежуточного участка (3A-3; 5A-3; 9A-3), и транспортные средства (200) линии (3A; 5A; 9A) находятся в зацеплении с изогнутым рельсом (100) между входом (A) и выходом (D).
11. Конструкция по любому из предыдущих пунктов, отличающаяся тем, что дополнительно содержит путь (320; 420) качения для транспортных средств (200) линии (3A; 5A; 9A), между входом (A) и выходом (D), при этом по меньшей мере часть (320-l; 420-l) этого пути (320; 420) качения проходит в целом вдоль части радиоиды или кривой, образованной ортогональным смещением части радиоиды, по меньшей мере в проекции на среднюю плоскость или горизонтальную плоскость на первой части (A; B) по меньшей мере изогнутого промежуточного участка (3A-3; 5A-3; 9A-3).
12. Конструкция по п. 11, отличающаяся тем, что путь (320; 420) качения содержит по меньшей мере одну балку (300; 400), проходящую по меньшей мере частично вдоль части радиоиды или кривой, образованной ортогональным смещением части радиоиды, по меньшей мере в проекции на среднюю плоскость или горизонтальную плоскость.
13. Конструкция по любому из пп. 11 или 12, отличающаяся тем, что путь (320; 420) качения содержит по меньшей мере зону (314; 414) перехода с расположенным раньше по ходу движения участком (3A-1, 9A-1) по меньшей мере одного из несущего каната (3A, 9A) и/или расположенным дальше по ходу движения участком (3A-2, 9A-2) этого каната.
14. Конструкция по любому из предыдущих пунктов, отличающаяся тем, что направляющая тягового каната содержит множество элементов (500), распределенных по меньшей мере вдоль первой части (A; B).
15. Конструкция по п. 13, отличающаяся тем, что по меньшей мере определенные направляющие элементы (500) тягового каната убираются с линии (3A; 5A; 9A) при прохождении транспортных средств (200).
16. Конструкция по любому из предыдущих пунктов, отличающаяся тем, что указанная часть радиоиды или кривой, образованной ортогональным смещением части радиоиды, является частью клотоиды или кривой, образованной ортогональным смещением части клотоиды, соответственно.
17. Подвесная канатная транспортная установка, содержащая по меньшей мере одну подвесную канатную транспортную линию, содержащую расположенный раньше по ходу движения участок (3A-1; 5A-1; 9A-1) и расположенный дальше по ходу движения участок (3A-2; 5A-2; 9A-2), каждый из которых проходит в целом прямолинейно по меньшей мере в проекции на горизонтальную плоскость, отличающаяся тем, что установка дополнительно содержит конструкцию (7) по любому из предыдущих пунктов, в которой вход (A) и выход (D) соединены, соответственно, с расположенным раньше по ходу движения участком (3A-1; 5A-1; 9A-1) и расположенным дальше по ходу движения участком (3A-2; 5A-2; 9A-2).
| FR 3052131 A1, 08.12.2017 | |||
| EP 2853460 A1, 01.04.2015 | |||
| FR 3050425 A1, 27.10.2017 | |||
| JP 2006224884 A, 31.08.2006 | |||
| КАНАТНАЯ ПОДВЕСНАЯ ДОРОГА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2011 |
|
RU2516858C2 |

