Изобретение относится к области машиностроения, а именно к механизмам преобразования вращательного движения в поступательное и наоборот.
Существует множество механизмов преобразования вращательного движения в поступательное, в том числе с зубчатыми передачами. К наиболее близким аналогам можно отнести следующие механизмы.
Известен бесшатунный механизм, содержащий корпус, два кривошипа, между которыми установлен коленчатый вал, соединенный со штоками посредством штоковых шеек, механизм синхронизации вращения, выполненный в виде шестерен, которые закреплены на опорных шейках коленчатого вала и находятся в зацеплении с неподвижными, выполненными с внутренним зацеплением зубчатыми колесами (С.С.Баландин. Бесшатунные двигатели внутреннего сгорания. - М.: Машиностроение, 1972 г., стр.14, рис.11(б)).
Известен асинхронный бесшатунный механизм, содержащий два промежуточных вала, шарнирно связанных каждый с опорным кривошипом и с общей для них эксцентриковой втулкой. На валах установлены вращающиеся шестерни с радиусом начальной окружности, равным одной четвертой части хода поршней, находящиеся в зацеплении с неподвижными шестернями внутреннего зацепления с радиусом начальной окружности, равным половине хода поршней (патент РФ №2256800, МКП F01B 9/02).
Известен планетарный механизм преобразования движения, содержащий корпус с центральным зубчатым колесом, имеющим внутреннее зубчатое зацепление с сателлитом, диаметр d делительной окружности которого равен половине диаметра D делительной окружности центрального зубчатого колеса, вал сателлита, установленный во взаимодействующем с корпусом водиле, кривошип связан с сателлитом посредством закрепления его с возможностью изменения межосевого расстояния между ним и валом сателлита (патент РФ №2219398, МПК F16H 37/16).
Данные механизмы объединяет то, что в роли направляющих используется планетарная зубчатая передача, состоящая из зубчатого колеса с внутренними зубьями с делительным диаметром D, находящегося в зацеплении с сателлитом с делительным диаметром d, равном половине D. При таком отношении делительных диаметров угловая скорость сателлита оказывается равной по модулю и противоположной по направлению угловой скорости водила. При таком соотношении скоростей траектории точек, лежащих на ободе сателлита (места крепления пальца), становятся прямыми с длиной, равной 2-м диаметрам сателлита или диаметру зубчатого колеса.
Недостатком таких механизмов является невозможность их применения в случаях, когда требуется малый ход штока, поршня и т.д., при значительных передаваемых усилиях, это объясняется тем, что размеры механизма определяет не передаваемое усилие, а ход поршня (штока), напрямую определяющий диаметр зубчатых колес и шестерней.
Также к недостаткам таких механизмов можно отнести то, что точки, описывающие необходимые траектории (места крепления пальца), лежат на ободе колеса, это усложняет конструкцию сателлита либо пальца.
Таким образом, задачей является создание преобразователя вращательного движения в поступательное с расширенными техническими характеристиками.
Технический результат - возможность при малом ходе рабочего органа передавать значительные усилия, а также упрощенная конструкция выходного сателлита.
Технический результат решается устройством, содержащим корпус с закрепленным в нем неподвижным центральным зубчатым колесом, двойной сателлит, состоящий из жестко соединенных малой и большой шестерней, выходной сателлит и асимметричное водило, на котором закреплены с возможностью вращения двойной сателлит и выходной сателлит, кроме того, неподвижное центральное зубчатое колесо имеет внешнее зубчатое зацепление с малой шестерней двойного сателлита, а большая шестерня двойного сателлита имеет внешнее зубчатое зацепление с выходным сателлитом, при этом их делительные диаметры отвечают следующим соотношениям:
(d2/d3 ')·(d3 ''/d4)=2,
где d2 - делительный диаметр неподвижного центрального зубчатого колеса;
d3 ' - делительный диаметр малой шестерни двойного сателлита;
d3 '' - делительный диаметр большой шестерни двойного сателлита;
d4 - делительный диаметр выходного сателлита,
при этом их оси вращения параллельны оси вращения асимметричного водила и лежат в одной плоскости, и на выходном сателлите на расстоянии от оси вращения, равном расстоянию между осью его вращения и осью вращения асимметричного водила, закреплен палец, выступающий из корпуса через прорезь.
Технический результат достигается за счет того, что в данном механизме отсутствует прямая связь между ходом пальца и диаметрами зубчатых колес и шестерней, что позволяет подбирать их диаметры таким образом, что даже при малом ходе рабочего органа возможна, по условиям прочности, передача значительных усилий и изменение на более оптимальное места крепления пальца к выходному сателлиту.
Сущность изобретения поясняется на чертежах:
Фиг.1. Структурная схема механизма.
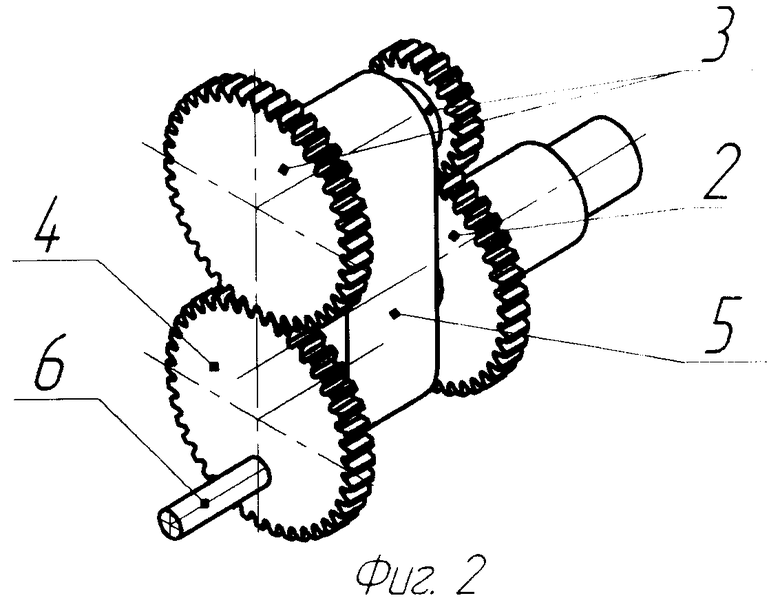
Фиг.2. Аксонометрия механизма без корпуса.
Механизм состоит из корпуса 1 и закрепленного в нем неподвижного центрального зубчатого колеса 2, находящегося в зубчатом зацеплении с малой шестерней двойного сателлита 3. Малая шестерня двойного сателлита 3 жестко связана с большой шестерней двойного сателлита 3. Большая шестерня двойного сателлита 3 находится в зубчатом зацеплении с выходным сателлитом 4. Двойной сателлит 3 и выходной сателлит 4 установлены с помощью вращательных кинематических пар в асимметричном водиле 5, при этом оси их вращения параллельны оси вращения асимметричного водила 5, которая совпадает с осью неподвижного центрального зубчатого колеса 2. Делительные диаметры неподвижного центрального зубчатого колеса 2 и шестерен соответствуют следующему отношению:
(d2/d3 ')·(d3 ''/d4)=2,
где d2 - делительный диаметр неподвижного центрального зубчатого колеса 2;
d3 ' - делительный диаметр малой шестерни двойного сателлита 3;
d3 '' - делительный диаметр большой шестерни двойного сателлита 3;
d4 - делительный диаметр выходного сателлита 4.
На выходном сателлите 4 неподвижно закреплен палец 6 так, что расстояние между осью пальца 6 и осью вращения выходного сателлита 4 равно расстоянию между осью вращения выходного сателлита 4 и осью вращения асимметричного водила 5. Палец 6 выступает через прорезь в корпусе 1.
Механизм работает следующим образом.
При вращении асимметричного водила 5 малая шестерня двойного сателлита 3 обкатывается по неподвижному центральному зубчатому колесу 2, вращательное движение малой шестерни двойного сателлита передается на большую шестерню двойного сателлита 3, которая вращает выходной сателлит 4, при этом палец 6 движется по прямолинейной траектории, длина которой равна четырем расстояниям между осью приводного сателлита 4 и осью вращения асимметричного водила 5.
Заявляемый механизм преобразования движения может быть использован в различных устройствах, где требуется преобразование вращательного движения в возвратно-поступательное, главным образом в механизмах с относительно малой амплитудой и большим предаваемым усилием.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2500938C1 |
| ПОРШНЕВАЯ МАШИНА | 2002 |
|
RU2224113C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2002 |
|
RU2224935C2 |
| Зубчатый механизм с прерывистым движением выходного звена | 2019 |
|
RU2724005C1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
| Бесшатунный механизм | 2023 |
|
RU2805423C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Поршневое устройство насоса | 2019 |
|
RU2716521C1 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
Изобретение относится к области машиностроения, а именно к механизмам преобразования вращательного движения в поступательное и наоборот. Механизм преобразования движения содержит корпус с закрепленным в нем неподвижным центральным зубчатым колесом, двойной сателлит, состоящий из жестко соединенных малой и большой шестерней, выходной сателлит и асимметричное водило. На асимметричном водиле закреплены с возможностью вращения двойной сателлит и выходной сателлит. Неподвижное центральное зубчатое колесо имеет внешнее зубчатое зацепление с малой шестерней двойного сателлита, а большая шестерня двойного сателлита имеет внешнее зубчатое зацепление с выходным сателлитом. При этом их делительные диаметры отвечают следующим соотношениям: (d2/d3')·(d3''/d4)=2, где d2 - делительный диаметр неподвижного центрального зубчатого колеса; d3' - делительный диаметр малой шестерни двойного сателлита; d3'' - делительный диаметр большой шестерни двойного сателлита; d4 - делительный диаметр выходного сателлита. Оси их вращения параллельны оси вращения асимметричною водила и лежат в одной плоскости. На выходном сателлите на расстоянии от оси вращения, равном расстоянию между осью его вращения и осью вращения асимметричного водила, закреплен палец, выступающий из корпуса через прорезь. Технический результат - возможность при малом ходе рабочего органа передавать значительные усилия, а также упрощенная конструкция выходного сателлита. 2 ил.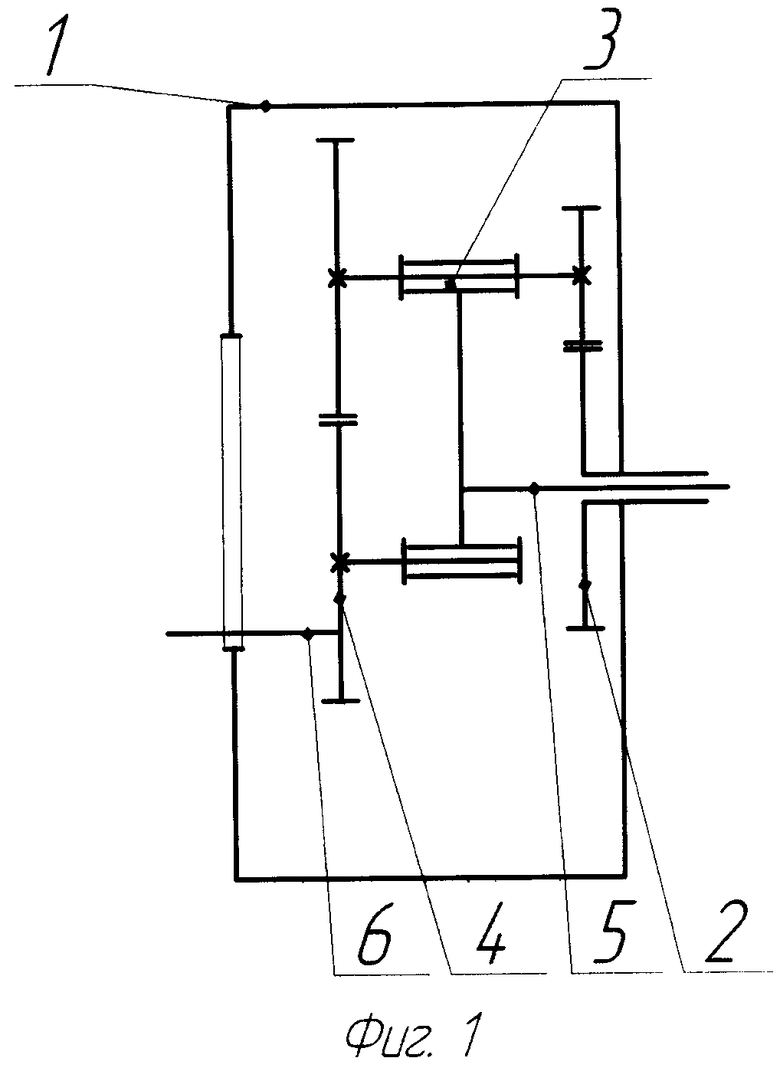
Преобразователь вращательного движения в поступательное, содержащий корпус с закрепленным в нем неподвижным центральным зубчатым колесом, двойной сателлит, состоящий из жестко соединенных малой и большой шестерней, выходной сателлит и асимметричное водило, на котором закреплены с возможностью вращения двойной сателлит и выходной сателлит, кроме того, неподвижное центральное зубчатое колесо имеет внешнее зубчатое зацепление с малой шестерней двойного сателлита, а большая шестерня двойного сателлита имеет внешнее зубчатое зацепление с выходным сателлитом при следующем соотношении их диаметров (d2/d3')·(d3''/d4)=2, где d2 - делительный диаметр неподвижного центрального зубчатого колеса, d3' - делительный диаметр малой шестерни двойного сателлита, d3'' - делительный диаметр большой шестерни двойного сателлита, d4 - делительный диаметр выходного сателлита, при этом их оси вращения параллельны оси вращения асимметричного водила и лежат в одной плоскости, и на выходном сателлите на расстоянии от оси вращения равном расстоянию между осью его вращения и осью вращения асимметричного водила закреплен палец, выступающий из корпуса через прорезь.
| ПЛАНЕТАРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2000 |
|
RU2172879C1 |
| Преобразующий зубчатый механизм | 1989 |
|
SU1726874A1 |
| Механизм для преобразования вращательного движения во вращательно-возвратно-поступательное | 1977 |
|
SU767437A1 |
| CN 201836308 U, 18.05.2011. | |||

