Настоящее изобретение относится к устройствам для определения положения для поворотного положения или линейного положения подвижных частей приводов, в частности гидравлических или электрогидравлических приводов, которые функционально надежны даже в экстремальных условиях окружающей среды, таких как очень низкие температуры и риск взрыва. Устройство определения положения в соответствии с изобретением относится, в частности, к гидравлическим приводам с подвижной частью, которая выполняет вращательное движение или линейное перестановочное движение на протяжении заданного хода перестановки, при этом поворотное положение или линейное положение подвижной части регистрируется с помощью устройства согласно изобретению с максимально возможной точностью. Такие устройства для определения положения также называются датчиками или позиционными датчиками для положения таких приводов с подвижными частями, как поворотные валы или приводные тяги.
В предшествующем уровне техники, например, для определения положений вращения таких приводов или арматуры известно использование потенциометров или других датчиков, постоянно определяющих положение вращения. С помощью таких потенциометров соответствующие положения подвижных частей приводов непрерывно регистрируются и выдаются для дальнейшей обработки. Во многих гидравлических приводах, например, для использования для приведения в действие заслонок, шаровых кранов и подобного, обычно используются такие потенциометры, которые регистрируют полное перестановочное движение. Поэтому они точны, но также часто подвержены сбоям. С другой стороны, также известно определение только соответствующего конечного положения хода перестановки таких гидроприводов с соответствующими концевыми позиционными выключателями, и в этом случае информация об относительном положении в промежуточных позициях хода перестановки между начальным положением и конечным положением отсутствует. Это приводит к недостаткам и ограничениям в отношении контроля и регулирования такой арматуры с гидравлическим приводом.
Существуют также области применения, в которых невозможно определить положение таких подвижных частей приводов с помощью электрических потенциометров или это часто приводит к отказам и, следовательно, к очень неточному управлению и регулированию приводов. Например, при очень низких температурах в полярной зоне до -55°С гидроприводы для приведения в действие заслонок, клапанов или шаровых кранов обычно еще полностью работоспособны, но зачастую уже не могут регулироваться или контролироваться с достаточной точностью, поскольку информация о взаимном расположении подвижных частей привода, таких как валы или перемещающие тяги, отсутствует. Относительное положение подвижных частей поворотного вала для вращательного движения или линейно регулируемого узла часто не может быть установлено с достаточной точностью. При экстремальных температурах часто возникают отклонения в точной позиции подвижных частей приводов из-за меняющейся вязкости гидравлического масла или меняющихся условий окружающей среды. Также при других очень сложных условиях окружающей среды, таких как высокая температура, опасность взрыва и подобное, а также при их сочетании обычные чисто электрические датчики положения, такие как потенциометры, часто перестают функционировать в полном объеме. С одной стороны, в этом случае могут возникать сбои, так как определение положения становится более невозможным. С другой стороны, также может быть очень неточная информация при определении положения вращения или точного положения переставляемой подвижной части приводов и, таким образом, появляется неправильно отрегулированная арматура, такая как заслонки или шаровые краны, с соответствующими результирующими повреждениями.
На этом фоне задачей настоящего изобретения является создание устройства для определения поворотного положения или линейного положения подвижных частей гидравлических или электрогидравлических приводов и такого привода со средствами определения положения, с помощью которых даже в экстремальных условиях окружающей среды условиях, таких как очень низкие температуры до -55°С, становится возможным надежное обнаружение и достаточно точное определение расположения подвижных частей приводов в любом рабочем положении. Устройство в соответствии с изобретением также должно обеспечивать максимально точное отображение фактического положения и позиции по ходу перестановки с наименьшими техническими затратами и при сравнительно компактной конструкции.
Эта задача решается с помощью устройства, имеющего признаки пункта 1 формулы изобретения, и привода, имеющего признаки пункта 17 формулы изобретения. Предпочтительные осуществления и усовершенствования изобретения являются предметом зависимых пунктов формулы изобретения.
Согласно изобретению предложено устройство определения положения для поворотного положения или линейного положения подвижных частей приводов, в частности гидравлических или электрогидравлических приводов, которые функционально надежны в экстремальных условиях окружающей среды, таких как очень низкие температуры и когда существует риск взрыва, в котором подвижная часть совершает вращательное движение или линейное перестановочное движение относительно неподвижной части, с блоком переключателей, который содержит множество переключателей, расположенных рядом друг с другом в ряд, при этом блок переключателей расположен на неподвижной части, и с исполнительным элементом для непосредственного или не опосредованного приведения в действие переключателей блока переключателей в зависимости от относительного положения подвижной части, при этом устройство отличается тем, что исполнительный элемент имеет множество переключающих средств (средств активации переключения), соответствующих числу переключателей блока переключателей, при этом переключающие средства соответственно таким образом соотнесены с переключателями за счет последовательного соединения и/или расположения между подвижной частью и неподвижной части, что соответственно имеется определенная однозначная комбинация положений переключения переключателей для каждого относительного расположения между подвижной частью и неподвижной частью, при этом предусмотрен модуль управления с блоком оценки, в котором сохранена кодировка различных положений переключения переключателей по отношению к относительному положению подвижной части привода.
Таким образом, в устройстве, согласно изобретению, используется множество простых переключателей блока переключателей, которые функционально соединены с расположенными напротив переключающими средствами исполнительного элемента, чтобы добиться максимально точного обнаружения расположения даже в промежуточных положениях на ходе перестановки привода. Таким образом, изобретение предлагает квазинепрерывное и отказоустойчивое определение положения для таких приводов. Переключающие средства расположены таким образом, что они могут безопасно соответственно переключать различные переключатели блока переключателей в соответствии с заданной схемой переключения при перемещении привода. Переключающие средства предусмотрены при этом, например, с фиксированным расположением, контуром или формой, так что различные переключатели соответственно связаны друг с другом в четко определенной комбинации положений переключения в каждом расположении подвижной части привода. Определенное однозначное соотнесение комбинации положений переключателя с (фактическим) относительным положением подвижной части привода закладывается согласно изобретению в кодировке в модуле управления, так что на основе различных положений переключателя или комбинации положений переключателя соответствующее фактическое положение привода может быть обнаружено достаточно точно без необходимости в постоянном электрическом датчике, таком как потенциометр. Посредством устройства, согласно изобретению, стало возможным конструктивно очень простым и надежным образом обнаруживать множество различных положений привода при помощи исполнительного элемента, соединенного с подвижной частью, при этом исполнительный элемент через соответствующее множество переключающих средств переключает соответствующие переключатели по-разному в зависимости от позиции.
Вследствие различных положений переключения на основе кодировки, сохраненной в модуле управления, затем с высоким уровнем функциональной надежности могут определяться фактическое расположение и положение во множестве отдельных дискретных точек положения на ходе перестановки. Таким образом, изобретение позволяет осуществлять квазинепрерывное определение относительной позиции регулируемой подвижной части привода без обеспечения действительно постоянного непрерывного измерения с помощью электрических средств посредством потенциометра или других подобных датчиков. Простое использование ряда переключателей с соответствующими переключающими средствами на исполнительном элементе, которые взаимодействуют с подвижной частью гидравлического привода через связанные приводы, также все еще функционально надежно в экстремальных условиях, таких как очень низкие температуры, например, до - 55°С в полярной зоне на кораблях или аналогичных устройствах. Решение, согласно изобретению, также обеспечивает конструктивно очень простую и относительно компактную форму отказоустойчивого средства для улучшенного определения положения. Блок переключателей и исполнительный элемент могут быть реализованы очень близко друг к другу при очень малых размерах. Таким образом, облегчается установка устройства в такие приводы и арматуру.
Такое соотнесение согласно изобретению между положениями переключателей блока переключателей и относительным положением привода может быть либо линейным, непрерывным соотнесением, либо соотнесением, изменяющимся на протяжении хода перестановки. Например, переключающие средства исполнительного элемента могут быть сформированы таким образом, что могут быть обнаружены точки перестановки, которые находятся ближе друг к другу или дальше друг от друга по ходу перестановки гидравлического привода. Например, исполнительный элемент может быть выполнен с такими переключающими средствами, которые имеют более тесную последовательность обнаружения в чувствительных к помехам, критических точках перестановки привода. Такой вариант изобретения, который может быть реализован, например, в предпочтительных вариантах, может быть получен тем, что переключающее средство или соответственно исполнительный элемент соединены с подвижной частью через непостоянную передачу. Например, передача может быть заменена зубчатой передачей с постоянным делительным диаметром за счет переменного перемещения по диаметру делительной окружности, например, за счет эксцентрично расположенных осей вращения относительно делительных окружностей элементов зубчатого колеса. В качестве альтернативы могут использоваться различные сопряженные передачи, в которых разрешающая способность обнаружения хода перестановки увеличена или уменьшена в выбранных областях. При таком предпочтительном варианте осуществления изобретения переключающее средство исполнительного элемента не должно дополнительно изменяться в отношении расположения относительно переключателя. Только за счет формы или расположения самого исполнительного элемента могут быть обеспечены различные диапазоны точности определения хода перестановки привода.
Согласно предпочтительному варианту осуществления изобретения переключатели блока переключателей представляют собой простые переключатели с функцией переключения в виде двухпозиционных переключателей или многопозиционных переключателей. Таким образом, переключатели блока переключателей, согласно изобретению, являются конструктивно простыми переключателями и, следовательно, очень прочными и нечувствительными к каким-либо неисправностям. Каждый из переключателей может быть реализован, например, как простой двухпозиционной переключатель с одним положением включения/выключения. Существуют различные варианты таких переключателей, например тумблер, нажимной переключатель или другие формы переключателей, которые могут приводиться в действие механически непосредственно или также опосредовано, с помощью бесконтактных переключающих средств в соответствии с перемещением привода. Согласно изобретению, простые переключатели с множественной функцией переключения с множеством точек переключения также могут быть использованы в одном переключателе. Таким образом, устройство можно сделать еще более компактным по конструкции, так как имеется больше положений переключения и комбинаций положений переключения для кодового определения положений привода по сравнению с двухпозиционным переключателем с простой функцией включения/выключения.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения переключатели снабжены переключающими поверхностями или переключающими элементами для перестановки с помощью переключающих средств в непосредственном контакте. Переключающие средства могут быть выполнены в виде переключающих рычагов, кулачков на кулачковом валу или кулачковой дорожке (кулачковой тяге) или других компонентов, выполненных в виде взаимодействующих с переключающими поверхностями или переключающими элементами переключателей, позиционированных друг напротив друга в соответствующей форме и расположении для приведения в действие блока переключателей. Это обеспечивает безотказное и функционально надежное определение расположения даже в экстремальных внешних условиях.
Согласно еще одному альтернативному в этом отношении варианту осуществления изобретения переключатели представляют собой переключатели, которые могут приводиться в действие бесконтактно или соответственно являются бесконтактными. Переключатели могут быть выполнены, например, в виде так называемых герконов, датчиков Холла, индуктивных переключателей или емкостных переключателей. В некоторых применениях бесконтактное приведение в действие имеет то преимущество, что не требуется непосредственного контакта между переключающими средствами исполнительного элемента и самими переключателями. Таким образом, переключающее средство и исполнительный элемент также могут быть расположены на определенном расстоянии от собственно блока переключателей. Это имеет различные другие преимущества, поскольку в результате также предотвращается механическое разрушение из-за загрязнений и подобного.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения исполнительный элемент механически непосредственно связан с подвижной частью в отношении перестановочного движения привода. Непосредственное механическое соединение исполнительного элемента с подвижной частью привода, такой как приводной вал или приводной шток гидропривода клапана, может осуществляться, например, через соответствующее зубчатое соединение, зубчатое колесо, шлицевой вал или аналогичные механические средства, известные специалистам в данной области техники. В результате устройство может очень точно определить соответствующий ход перестановки и позицию привода. Устройство может, например, на установленном ходе перестановки между начальным положением и конечным положением на соответствующих предусмотренных промежуточных позициях переключателя посредством исполнительного элемента с переключающими средствами определять соответствующие позиции во время регистрации кодировки в блоке управления. Однако, устройство можно использовать и в качестве альтернативы для определения неограниченного хода перестановки поворотного привода, например, поворотного вала для гидравлического устройства. Благодаря непосредственному механическому соединению в соответствии с изобретением между исполнительным элементом и подвижной частью привода может быть достигнуто очень точное определение соответствующей позиции с помощью простых средств без необходимости полностью непрерывно измеряющих электрических устройств, таких как потенциометры и подобное.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения исполнительный элемент выполнен в виде кулачкового вала или кулачкового барабана с множеством различных кулачков в качестве переключающих средств для различных переключателей, в контакте с которыми находятся кулачки. Согласно изобретению, приведение в действие переключателей осуществляется с помощью особой формы кулачков на кулачковом вале. Таким образом, кулачковый вал или кулачковый барабан выполнен очень компактным, например, различной формы и с различным количеством кулачков. Например, для первого переключателя и второго переключателя может быть предусмотрен один кулачок на кулачковом барабане с положением ВКЛ или ВЫКЛ переключателя на протяжении полного оборота кулачкового барабана, в то время как для другого третьего, четвертого или пятого переключателя выполняется соответственно два, три или даже восемь кулачков на единственной конфигурации кулачка по окружности с соответствующим множеством переключений. Согласно изобретению, такой кулачковый барабан может очень компактно обеспечивать большое количество возможных комбинаций положений переключателей. В результате количество позиций для определения положения относительно велико. За счет этого исполнительный элемент очень компактен и имеет выполненные в очень простой форме переключающие средства в виде множества кулачков различной формы и расположения на кулачковом валу, тем не менее, с очень точным, квазинепрерывным определением движения.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения блок переключателей с множеством переключателей представляет собой единый блок с объединенным в блок множеством переключателей, расположенных один над другим или рядом друг с другом, которые соответственно установлены в фиксированных позициях. Таким образом реализуются так называемые комбинированные опоры переключателей или блоки переключателей с отдельными переключателями, соответственно расположенными непосредственно друг за другом или рядом друг с другом. Таким образом, надежно задается положение и позиция переключателей. Блоки переключателей также можно легко установить и заменить в случае неисправности. Можно также расположить несколько таких комбинированных блоков переключателей в виде блочных элементов на одной и той же подвижной части привода, так что становится возможной своего рода избыточность в определении положения привода. Это дополнительно повышает надежность определения положения. Объединение отдельных переключателей в соответствующих переключающих блоках также имеет то преимущество, что упрощается монтаж и демонтаж и становится возможной очень компактная конструкция сенсорного устройства.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения кодировка различных положений переключения и комбинаций положений переключения переключателей сохраняется в модуле управления устройства для поворотных положений или линейных положений подвижной части привода в форме кода Грея. При таком коде Грея соотнесение комбинации положений переключения переключателей с соответствующими относительными положениями привода может быть сохранено в относительно просто выполненном устройстве управления. Код Грея позволяет преобразовать большое количество простых бинарных положений переключения отдельных переключателей в удобную кодировку фактического положения привода. Код Грея также может быть легко сохранен в элементе памяти блока управления устройства согласно изобретению для соответствующих конструктивных вариантов выполнения привода и соответствующих переключателей блока переключения. Другие типы кодировки также могут быть использованы в рамках настоящего изобретения для достижения однозначного соотнесения соответствующего перестановочного движения привода с различными положениями переключения или комбинациями положений переключения переключателей блока переключателей.
Согласно еще одному предпочтительному варианту осуществления изобретения кодировка в модуле управления положений переключения переключателей воспроизводит квазинепрерывное отображение различных дискретных точек перестановки заданного хода перестановки привода. Таким образом, устройство обеспечивает квазинепрерывное определение соответствующего положения на протяжении заданного хода перестановки. Кодировка предоставляется и сохраняется таким образом, что соответствующие отдельные точки перестановки в заранее определенных позициях хода перестановки отображают перемещение как можно лучше и с достаточной точностью для соответствующего применения. Таким образом, решение, согласно изобретению, может обеспечить достаточно надежную и точную замену полностью непрерывному определению положения. Изобретение не ограничивается простыми областями применения таких гидравлических приводов и может также успешно использоваться в относительно экстремальных условиях окружающей среды, таких как очень высокие температуры, очень низкие температуры, опасность взрыва и подобное, а также их комбинация. Предварительно определенный ход перестановки, согласно изобретению, может быть, например, перестановкой между начальным положением и конечным положением привода или соответственно арматуры. В случае арматуры заслонки это было бы, например, открытым и закрытым положением заслонки.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения кодировка в модуле управления устройства отражает относительно положений переключения переключателей точки перестановки, распределенные через равные промежутки на протяжении заданного хода перестановки привода. Точки перестановки, равномерно распределенные по ходу перестановки, поэтому предусмотрены относительно равномерно через промежутки друг от друга. Таким образом, осуществляется полное и точное отображение позиции перестановки через равные промежутки на протяжении хода перестановки согласно изобретению для обнаружения фактического расположения гидравлического привода.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения кодировка положений переключения переключателей в модуле управления воспроизводит позиции подвижной части привода, которые изменяются по ходу перестановки привода. С таким различным расположением и отображением точек перестановки привода могут быть реализованы конкретные выгодные конфигурации управления и регулирования привода. Например, в некоторых приложениях позиция вблизи конечной точки более важна, чем в начальной области хода перестановки. Поэтому в этой зоне предусмотрено более плотное расположение точек обнаружения переключателей. Таким образом, с помощью устройства, согласно изобретению, может быть достигнута точность, лучше адаптированная к соответствующей цели применения.
Точность обнаружения устройства согласно изобретению, изменяющаяся в зависимости от хода перестановки, может быть достигнута, например, за счет того, что исполнительный элемент располагается эксцентрично относительно оси вращения при поворотном перемещении. Исполнительный элемент также может быть выполнен с переключающими средствами различных типов, которые позволяют запускать моменты срабатывания разной величины для обнаружения хода перестановки в различных позициях хода перестановки. В качестве альтернативы может иметь место также неравномерное распределение переключающих средств исполнительного элемента, благодаря чему становятся возможными такие дополнительные преимущества в отношении точности определения позиций перестановки гидравлического привода, которая изменяется на протяжении хода перестановки.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения в модуле управления устройства сохранена оценочная схема переключения, которая обеспечивает возможность экстраполяции положений подвижной части относительно неподвижной части на основе ранее обнаруженных положений переключения переключателей. С помощью такого модуля экстраполяции в модуле управления также может быть достигнуто точное предсказание будущих положений гидравлического привода без того, что положения уже были достигнуты. С помощью такого модуля можно реализовать своего рода опережающее управление и регулирование приводов, чтобы надежно избежать ошибочного переключения или даже повреждения привода.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения два или более блока переключателей с множеством соответствующих переключателей расположены на подвижной части или на элементе устройства, который непосредственно механически связан с подвижной частью. Таким образом, устройство в соответствии с этим вариантом осуществления имеет множество блоков переключателей для еще более улучшенного обнаружения соответствующего положения гидравлического привода. Своего рода резервирование или двойной эффект также достигается за счет дополнительного блока переключателей, так что в случае отказа переключателя или блока переключателей надежно гарантируется обнаружение. С помощью такого множественного блока переключателей также могут быть достигнуты другие преимущества с технической точки зрения, а именно, например, своего рода согласование между различными положениями переключения, чтобы непосредственно компенсировать любые неточности или соответственно увеличить количество точек определения в случае различного расположения.
Согласно еще одному предпочтительному варианту осуществления изобретения исполнительный элемент имеет переключающие средства для соответствующих переключателей, основанные на немеханической техники срабатывания, в частности на гидравлическом, электрическом или магнитном приведении в действие. Такие механически опосредованные приведения в действие переключателей с помощью исполнительного элемента имеют дополнительные преимущества в особых условиях применения: например, в условиях сильных ударов, вибраций, опасности возгорания, высокой температуры или электромагнитного излучения, могут обеспечиваться специальные применения для определения положения гидравлического привода, которые могут быть реализованы достаточно безопасно и относительно просто по конструкции без необходимости использования действительно непрерывных потенциометров и подобного. Опосредованная, немеханическая техника срабатывания может также потребоваться в определенных областях, где отдельные части переключателей и переключающих средств не всегда могут легко и беспрепятственно приходить в контакт друг с другом. Также в таких средах в соответствии с изобретением может быть реализовано предпочтительное квазинепрерывное обнаружение положения.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения средства переключения исполнительного элемента или сами переключатели содержат средство для уменьшения трения. Это средство уменьшения трения может, в частности, содержать ролик, элемент скольжения или покрытие на контактной поверхности одного из этих элементов. Преимущество снижения трения заключается в том, что возможна долговременная бесперебойная работа при определении положения без необходимости технического обслуживания. Уменьшение трения также имеет то преимущество, что обеспечивается легкое срабатывание переключателей. Таким образом, переключатели надежно находятся в соответствующих заданных позициях перестановки, что является преимуществом, в частности, в случае многопозиционных переключателей.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения между приводным элементом подвижной части и исполнительным элементом, имеющимся на неподвижной части, предусмотрена механическая связь в виде передачи или в виде зубчатых колес или зубчатых элементов. Такая непосредственная механическая связь является надежной при передаче соответствующих положений между приводной частью гидравлического привода и передающим элементом для определения положения с помощью устройства согласно изобретению. В результате исполнительный элемент непосредственно связан с гидравлическим приводом и его подвижной частью, так что обеспечивается надежная прямая передача информации о соответствующем текущем положении. Также возможна альтернативная опосредованная механическая связь через передачи, зубчатые элементы и подобное.
В соответствии с пунктом 17 формулы изобретения предложен гидравлический или электрогидравлический привод для приведения в действие арматур, в частности, заслонок, шаровых кранов или вентилей, на протяжении заданного хода перестановки между, в частности, открытым положением и закрытым положением с относительным перемещением подвижной части привода по отношению к неподвижной части, при этом предусмотрено устройство определения положения для поворотного положения или линейного положения подвижной части привода по любому из пп. 1-16.
Согласно соответствующему варианту осуществления изобретения привод представляет собой гидравлический привод для вращательного движения поворотной арматуры, такой как заслонки, шаровые краны или клапаны, при этом подвижная часть привода представляет собой поворотный приводной вал, а устройство для определения положения установлено между приводным валом и неподвижной частью привода.
Дополнительные признаки, аспекты и преимущества изобретения будут более подробно описаны далее с использованием различных примерных вариантов осуществления изобретения в связи с прилагаемыми чертежами и содержащимися в них фигурами. На чертежах показано:
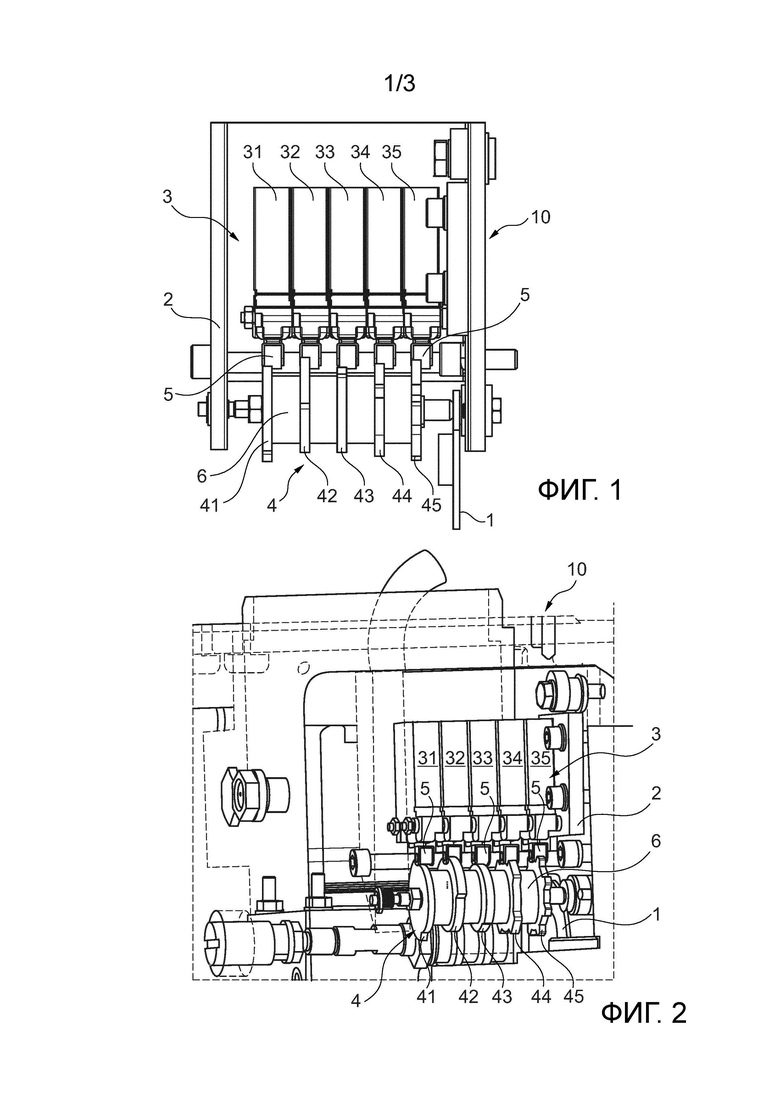
Фиг. 1 вид сверху варианта осуществления устройства для определения положения в соответствии с изобретением;
Фиг. 2 вид в перспективе примерного варианта осуществления устройства для определения положения в соответствии с изобретением согласно фиг.1;
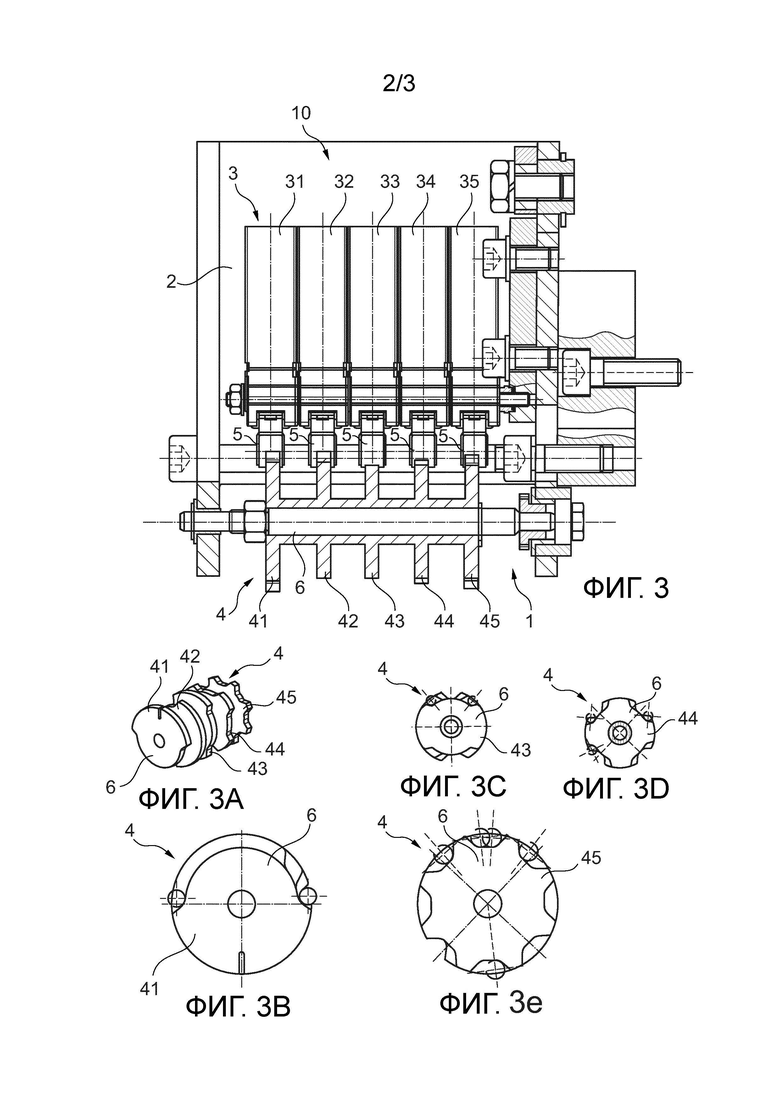
Фиг. 3 вид в разрезе дополнительного примерного варианта осуществления устройства согласно изобретению для определения поворотного положения гидравлического привода;
Фиг. 3а вид в перспективе детали исполнительного элемента устройства определения положения согласно фиг. 3;
Фиг. 3b - Фиг. 3е различные виды в разрезе кулачкового барабана в качестве примера исполнительного элемента устройства определения положения согласно варианту осуществления по фиг. 3; и
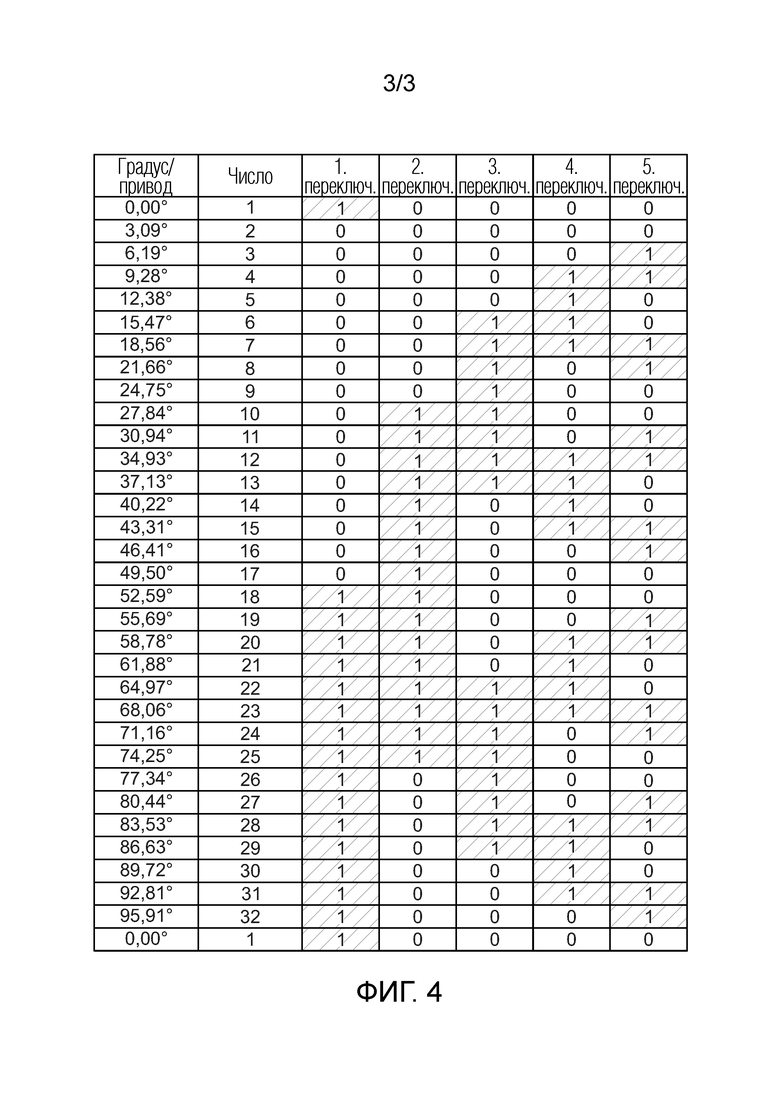
Фиг. 4 таблица дополнительного примерного варианта осуществления устройства определения положения в соответствии с изобретением для иллюстрации кодировки комбинации положения переключения переключателей и положения привода, сохраненного в модуле управления в форме кода Грея.
На фиг. 1 и фиг. 2 чертежей показан первый вариант осуществления устройства 10 согласно изобретению для определения положения поворотного положения гидравлического привода. В этом примерном варианте устройство 10 содержит блок 3 переключателей с пятью переключателями 31, 32, 33, 34, 35, которые объединены в виде так называемой колодки переключателей или блока переключателей. Блок 3 переключателей установлен на неподвижной части 2, например корпусной части или фланцевой части гидропривода. Блок 3 переключателей связан с исполнительным элементом 4 для приведения в действие переключателей 31-35, при этом исполнительный элемент 4 непосредственно или опосредованно механически связан с подвижной частью 1 гидравлического или электрогидравлического привода. Вращательное движение установочного элемента, такого как приводной вал гидропривода, при этом механически передается исполнительному элементу 4, например, в виде комбинации зубчатого колеса, зубчатого венца, шлицевого вала или подобного. При перемещении гидравлического привода исполнительный элемент 4 также приводится в действие в соответствии с перестановочным движением привода.
В этом варианте вращательное движение подвижной части 1 (поворотный вал привода) передается непосредственно на кулачковый вал 6 или соответственно кулачковый барабан за счет связи с подвижной частью 1 привода через большое зубчатое колесо, находящееся в зацеплении с меньшим зубчатым колесом на кулачковом вале 6. В соответствии с количеством переключателей 31-35 в этом примерном варианте осуществления кулачковый вале 6 имеет пять переключающих средств 41, 42, 43, 44, 45, которые присутствуют в виде кулачков различной формы на кулачковом вале 6 в соответствующих позициях переключателей 31-35. В этом примере переключающие средства 41-45 установлены непосредственно напротив переключателей 31-35 блока 3 переключателей и механически непосредственно связаны с ним через средство 5 уменьшения трения, например ролик, для переключения переключателей 31-35. При повороте исполнительного элемента 4 в виде этого кулачкового вала 6 переключатели 31-35 соответственно включаются и выключаются каждый по-разному, при этом в каждом состоянии или расположении гидравлического привода образуется однозначная комбинация положений переключения переключателей 31-35. В этом примерном варианте переключатели 31-35 блока переключателей являются простыми двухпозиционными переключателями, то есть бинарными переключателями, так что они имеют либо положение ВКЛ, либо положение ВЫКЛ.
В этом примерном варианте осуществления изобретения исполнительный элемент 4 в виде кулачкового вала 6 имеет кулачки различной формы в качестве переключающих средств 41-45. В то время как первые два переключающие средства 41, 42 имеют соответственно по одному кулачку по окружности исполнительного элемента 4 для приведения в действие первых двух переключателей 31, 32, третье переключающее средство 43 представляет собой двойной кулачок, четвертое переключающее средство 44 представляет собой четверной кулачок, а пятое переключающее средство 45 имеет восемь кулачковых выступов по окружности. Это также видно из дополнительного представления на фиг. 3 и фиг. 3а-3е, из которого хорошо видны различным образом выполненные переключающие средства 41-45 в этом примерном варианте выполнения исполнительного элемента 4 для блока 3 переключателей. В этом примерном варианте выполнения переключатели 31-35 блока 3 переключателей представляют собой простые двухпозиционные переключатели, которые благодаря переключающим средствам 41-4 5 различной формы имеют установленную однозначную комбинацию переключений в каждом положении вращения поворотной части 1 гидравлического привода. Однако, также можно использовать многопозиционные переключатели с более чем двумя положениями переключения. Переключатели скомбинированы и расположены в блоке 3 переключателей таким образом, что при их взаимодействии с переключающими средствами 41-45 исполнительного элемента 4 каждый из них имеет четкие комбинации положений переключения в соответствующих положениях вращения подвижной части 1 привода. В каждом поворотном положении переключатели 31-35 либо включены, либо выключены, поскольку этот примерный вариант осуществления относится к простым двухпозиционным переключателям. Для уменьшения трения, на переключателях на конце, который входит в контакт с исполнительным элементом 4, соответственно предусмотрен ролик 5 в качестве средства уменьшения трения. Благодаря этому типу приведения в действие с помощью исполнительного элемента 4 переключатели позволяют точно определить соответствующее поворотное положение гидравлического привода или электрогидравлического привода в соответствии с кодировкой, сохраненной в модуле управления (не показан), как поясняется ниже.
На фиг. 4 показан пример код Грея для примерного варианта осуществления, показанного на фиг.1-3, в виде таблицы, которая хранится в модуле управления устройства 10. Благодаря соотнесению и расположению исполнительного элемента 4 в виде кулачкового вала 6 или соответственно кулачкового барабана с различной формой кулачков к пяти переключателям 31-35, переключатели 31-35 в комбинации приводятся в действие соответственно однозначно по-разному при каждом поворотном положении в 3,09°. Пять бинарных переключателей дают в общей сложности 25 (т.е. 32) возможных сигнальных сообщения модуля управления устройства 10, которые отражают соответствующее положение вращения подвижной части 1 гидравлического привода квазинепрерывно на протяжении хода перестановки. Это воспроизводится в коде Грея таблицы в соответствии с примером на фиг. 4.
Таким образом, устройство 10, согласно изобретению, обеспечивает квазинепрерывное и безотказное определение положения поворотной части гидравлического или электрогидравлического привода, например, гидравлического привода для приведения в действие заслонки шарового крана или подобного. Такую арматуру можно использовать и в экстремальных условиях, например, на кораблях или морских платформах, которые должны обеспечивать надежную работу даже при очень низких температурах, например в полярных регионах до -55°С. Обычные традиционные электрические потенциометры для определения положения вращения поворотных приводных частей таких гидравлических приводов больше не работают. Они могут выйти из строя или предоставить неверные значения измерения. Чтобы устранить этот недостаток, согласно изобретению, поворотное положение определяется квазинепрерывно посредством комбинации положений переключения переключателей 31-35 блока 3 переключателей. Для этого в соответствии с изобретением предусмотрены специальные исполнительные элементы 4, которые воспроизводят различную, но четкую комбинацию положений переключения для каждого поворотного положения или линейного положения подвижных частей 1 привода. Переключатели 31-35 в показанных примерных вариантах осуществления являются простыми двухпозиционными переключателями. Имеется в виду комбинированный блок или колодка переключателей в виде блока (3) переключателей. Количество переключателей также может быть более пяти. Переключатели 31-35 также могут быть многопозиционными переключателями с множеством позиций переключения, такими как тройные переключатели или двойные двухпозиционные переключатели, а не простыми двухпозиционными переключателями только с одним положением включения/выключения. При таком решении, согласно изобретению, может быть реализовано еще большее количество точек обнаружения посредством кодировки в модуле управления. Ролики 5 на концах переключателей 31-35 в показанных вариантах служат для уменьшения трения и обеспечения безопасной работы при работе с переключающими средствами 41-45 в виде различных кулачков кулачкового барабана 6 исполнительного элемента. 4. Однако, ролики 5 также могут быть исключены.
Вместо непосредственно механически связанных переключателей 31-35 согласно изобретению, также могут быть предусмотрены бесконтактные переключатели, например герконы, датчики Холла, индуктивные переключатели или емкостные переключатели. Для этого предусмотрены переключающие средства 41-45 другой конструкции, которые, однако, в соответствии с изобретением также связаны непосредственно или опосредованно с подвижной частью 1 привода, например с поворотным валом или линейной тягой для перемещения арматуры. Даже при такой форме опосредованной механической связи с бесконтактными переключателями благодаря специальной кодировке соотнесение различных положений подвижной части 1 с множеством переключателей 31-35 блока переключателей 3 устанавливается в модуле управления и надежно определяется в различных экстремальных условиях окружающей среды.
Устройство 10 для определения положения, согласно изобретению, имеет то преимущество, что оно надежно работает без сбоев даже в экстремальных ситуациях, таких как очень низкие или очень высокие температуры, удары, вибрации, пожары, электромагнитное излучение и подобное, а благодаря квазинепрерывному определению расположения на протяжении хода перестановки также гарантируется безотказное регулирование и управление такими гидравлическими или электрогидравлическими приводами. Согласно предпочтительному в этом отношении варианту, по меньшей мере, электрические или электронные компоненты устройства 10 специально защищены от условий окружающей среды, таких как огонь, удары, электромагнитное излучение и подобное. Электронные компоненты и, в частности, модуль управления для хранения кодировки между положениями переключения переключателей 31-35 блока переключения 3 и позициями хода перестановки подвижной части 1 привода могут быть реализованы путем соответственно защищенных частей корпуса, экранов или удаленного расположения от собственно гидропривода. Таким образом предотвращается ухудшение работы устройства для определения положения в таких экстремальных условиях окружающей среды, которые могут быть вызваны отказом отдельных электронных или электрических компонентов. В частности, согласно изобретению, модуль управления с блоком оценки и переключатели 31-35 блока 3 переключателей соответственно особо защищены от таких экстремальных условий внешней среды.
В примерных вариантах осуществления, показанных на чертежах, представлено устройство 10 согласно изобретению для определения положения для определения поворотного вращения ведущего вала гидравлического привода, например, арматуры для перестановки заслонок. Однако, устройство 10 согласно изобретению также можно использовать для обнаружения линейного положения линейно подвижной части такого привода. В этом случае исполнительные элементы 4 предпочтительно представляют собой квазиразвернутые кулачковые барабаны или кулачковые валы или соответствующие кулачковые тяги, которые взаимодействуют с соответствующими переключателями благодаря расположению и соотнесению с переключателями 41-45 исполнительного элемента. Или, альтернативно, используются другие переключающие средства. В таком варианте также четкое соотнесение положения с комбинациями положений переключения переключателей 31-35 блока переключателей 3 обеспечивается с помощью кодировки, хранящейся в модуле управления, для определения однозначного позиционирования привода в соответствии с фактической текущей позицией и положением приводной части.
Вместо кода Грея, как показано на фиг. 4, могут использоваться другие формы кодировки и соотнесение в модуле управления между положениями переключения переключателей 31-35 блока 3 переключателей и фактическим положением подвижной части 1 привода. Соотнесение и кодировка должны быть гарантированы настолько однозначно только в этом варианте, чтобы каждое положение подвижной части 1 привода отражало однозначную комбинацию положений переключателей 31-35.
Такая кодировка согласно этому примерному варианту осуществления изобретения с использованием кода Грея имеет то преимущество, что только один переключатель изменяет свое положение переключения в каждой точке переключения. Позиционные отклонения переключателя или элементов переключателя, например, из-за допусков при изготовлении и монтаже, зазоров подшипников, теплового расширения и подобного допустимы и не влияют на результат измерения. Другие системы кодировки, в которых не менее двух переключателей изменяют свое состояние в точке переключения, сравнительно уязвимы. Однако, согласно изобретению также возможно использовать другие формы кодировки. В соответствии с изобретением нет абсолютной необходимости в предварительно фиксированном согласовании между ходом перестановки подвижной части гидравлического привода и положениями переключения блока 3 переключателей. Также можно предусмотреть тип пути обучения или режим обучения в оценивающей электронике модуля управления. Например, гидравлический привод с подвижной частью 1 регулируется от первого конечного положения А до второго конечного положения В, а соответствующее присвоение позиций переключающих средств блока переключателей или исполнительного элемента 3 кодам затем корректируется соответствующим образом и снова сохраняется. В результате можно избежать чисто механической и относительно сложной настройки и юстировки измерительной системы. Вариант изобретения также может быть реализован с такой возможностью обучения модуля управления, согласно которой становится возможной более простая экстраполяция к еще не обнаруженным позициям перестановки.
Приведение в действие переключающими средствами 41-45 исполнительного элемента 4 также может осуществляться немеханическим способом. Например, возможно электрическое или жидкостное приведение в действие переключателей в форме дистанционного управления или по-другому реализованное приведение в действие переключателей 31-35. Эти конкретные варианты осуществления изобретения могут обеспечить дополнительные преимущества в экстремальных условиях окружающей среды. Однако, во многих применениях предпочтительнее непосредственная механическая связь через исполнительный элемент 4, который имеет переключающие средства 41-45, которые непосредственно приводят в действие переключатели 31-35 блока 3 переключателей.
Вид и форма кулачков в качестве переключающих средств 41-45 кулачкового вала 6 могут отличаться от показанных в примерных вариантах осуществления. Например, кулачки могут иметь различную форму закругления возвышения и впадины. Переключающие средства 41-45 также могут представлять собой простые выступы, углубления или выпуклости вместо кулачков, которые взаимодействуют с соответствующими элементами на переключателях 31-35 для переключения переключателей блока 3 переключателей.
Устройство (10) определения положения для поворотного положения или линейного положения подвижных частей приводов, в частности гидравлических или электрогидравлических приводов, которые функционально надежны в экстремальных условиях окружающей среды, таких как очень низкие температуры и когда существует риск взрыва, в котором подвижная часть (1) совершает вращательное движение или линейное перестановочное движение относительно неподвижной части (2) с блоком (3) переключателей, который содержит множество переключателей (31, 32, 33, 34, 35), расположенных рядом друг с другом в ряд, при этом блок (3) переключателей расположен на неподвижной части (2), и с исполнительным элементом (4) для непосредственного или опосредованного приведения в действие переключателей (31-35) блока (3) переключателей в зависимости от относительного положения подвижной части (1), при этом исполнительный элемент (4) имеет множество переключающих средств (41, 42, 43, 44, 45), соответствующих числу переключателей (31-35) блока (3) переключателей, при этом переключающие средства (41-45) соответственно таким образом соотнесены с переключателями (31-35) за счет последовательного соединения и/или расположения между подвижной частью (1) и неподвижной частью (2), что соответственно имеется определенная однозначная комбинация положений переключения переключателей (31-35) для каждого относительного расположения между подвижной частью (1) и неподвижной частью (2), при этом предусмотрен модуль управления с блоком оценки, в котором сохранена кодировка различных положений переключения переключателей (31-35) по отношению к относительному положению подвижной части (1) привода. 2 н. и 16 з.п. ф-лы, 9 ил.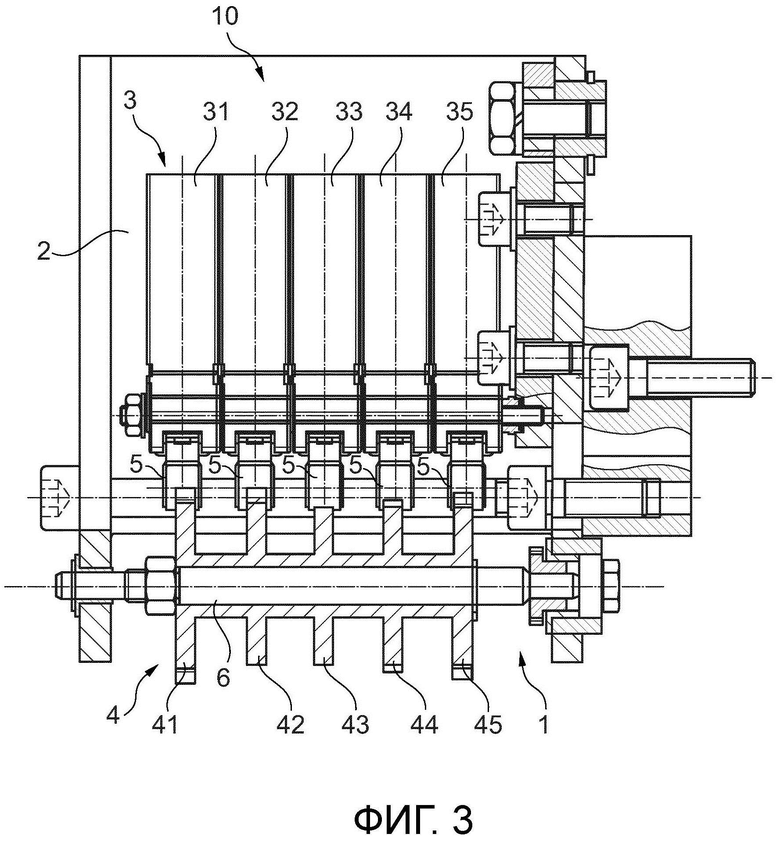
1. Устройство (10) определения положения для поворотного положения или линейного положения подвижных частей приводов, в частности гидравлических или электрогидравлических приводов, которые функционально надежны в экстремальных условиях окружающей среды, при таких как очень низкие температуры и риск взрыва, причем подвижная часть (1) совершает вращательное движение или линейное перестановочное движение относительно неподвижной части (2) с блоком (3) переключателей, который содержит множество переключателей (31, 32, 33, 34, 35), расположенных рядом друг с другом в ряд, при этом блок (3) переключателей расположен на неподвижной части (2), и с исполнительным элементом (4) для непосредственного или опосредованного приведения в действие переключателей (31-35) блока (3) переключателей в зависимости от относительного положения подвижной части (1), отличающееся тем, что исполнительный элемент (4) содержит множество переключающих средств (41, 42, 43, 44, 45), соответствующих числу переключателей (31-35) блока (3) переключателей, и при этом переключающие средства (41-45) соответственно таким образом соотнесены с переключателями (31-35) посредством последовательного соединения и/или расположения между подвижной частью (1) и неподвижной частью (2), что имеется соответственно установленная однозначная комбинация положений переключения переключателей (31-35) для каждого относительного расположения между подвижной частью (1) и неподвижной частью (2), и при этом предусмотрен модуль управления с блоком оценки, в котором сохранена кодировка различных положений переключения переключателей (31-35) по отношению к относительному положению подвижной части (1) привода.
2. Устройство (10) по п.1, отличающееся тем, что переключатели (31-35) представляют собой переключатели с простой функцией переключения в виде двухпозиционных переключателей или многопозиционных переключателей.
3. Устройство (10) по п.1 или 2, отличающееся тем, что переключатели (31-35) предусмотрены с переключающими поверхностями или переключающими элементами для перестановки посредством переключающих средств (41-45) в непосредственном контакте.
4. Устройство (10) по п.1 или 2, отличающееся тем, что переключатели (31-35) являются бесконтактно активируемыми переключателями или бесконтактными переключателями.
5. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что исполнительный элемент (4) непосредственно механически связан с подвижной частью (1) по отношению к перестановочному движению привода.
6. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что исполнительный элемент (4) в качестве переключающего средства (41-45) содержит несколько различных кулачков на кулачковом валу (6), которые находятся в контакте с переключателями (31-35).
7. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что блок (3) переключателей представляет собой единый блок со множеством переключателей (31-35), установленных друг над другом или рядом друг с другом в установленных позициях.
8. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что кодировка положений переключения переключателей (31-35) сохранена в модуле управления для поворотных положений или линейных положений подвижной части (1) привода в виде кода Грея.
9. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что кодировка положений переключения переключателей (31-35) в модуле управления воспроизводит квазинепрерывное отображение различных дискретных точек перестановки заданного хода перестановки привода.
10. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что кодировка положений переключения переключателей (31-35) в модуле управления отражает точки перестановки, распределенные через равные промежутки на протяжении заданного хода перестановки привода.
11. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что кодировка положений переключения переключателей (31-35) в модуле управления воспроизводит изменяемые по ходу перестановки привода позиции на ходе перестановки подвижной части (1) привода.
12. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что в модуле управления сохранена оценочная схема переключения, которая обеспечивает возможность экстраполяции положения подвижной части (1) по отношению к неподвижной части (2) на основе ранее зарегистрированных положений переключения переключателей (31-35).
13. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что два или более блоков (3) переключателей с множеством соответствующих переключателей (31-35) расположены на подвижной части (1) или элементе устройства (10), непосредственно механически связанном с подвижной частью (1).
14. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что исполнительный элемент (4) имеет переключающие средства (41-45) на базе немеханической техники срабатывания, в частности гидравлического, электрического или магнитного приведения в действие.
15. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что переключающие средства (41-45) исполнительного элемента (4) или переключатель (31-35) имеет средство (5) для уменьшения трения, в частности ролик или скользящий элемент.
16. Устройство (10) по любому из предшествующих пунктов, отличающееся тем, что между приводным элементом подвижной части (1) и исполнительным элементом (4), установленным на неподвижной части (2), предусмотрена механическая связь в виде передачи, зубчатого элемента или зубчатых колес.
17. Привод гидравлический или электрогидравлический для приведения в действие арматуры, в частности заслонок, шаровых кранов или вентилей, на протяжении заданного хода перестановки между, в частности, открытым положением и закрытым положением с относительным перемещением подвижной части (1) привода по отношению к неподвижной части (2), отличающийся тем, что предусмотрено устройство (10) определения положения для поворотного положения или линейного положения подвижной части привода по любому из пп.1-16.
18. Привод по п.17, отличающийся тем, что привод представляет собой гидравлический привод для вращательного движения поворотной арматуры, такой как заслонки, шаровые краны или вентили, отличающийся тем, что подвижная часть (1) привода представляет собой поворотный приводной вал, и при этом устройство (10) смонтировано между приводным валом и неподвижной частью (2) привода.
| УСТРОЙСТВО СИГНАЛИЗАЦИИ ПОЛОЖЕНИЙ | 1998 |
|
RU2177604C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ, ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, СТРУЙНЫЙ ДВИГАТЕЛЬ, УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ, БЛОК ПЕРЕКЛЮЧАТЕЛЕЙ | 2005 |
|
RU2288376C1 |
| DE 2912913 B2, 23.04.1981 | |||
| US 4504832 A1, 12.03.1985 | |||
| WO 2019111801 A1, 13.06.2019. | |||
