ОБЛАСТЬ ТЕХНИЧЕСКОГО ПРИМЕНЕНИЯ
[0001] Настоящее изобретение применяется в области горнодобывающего оборудования и, в частности, относится к автоматической системе управления монорельсовым подъемником с приводом на применения метода цифрового макета.
УРОВЕНЬ ТЕХНИКИ
[0002] В настоящее время Китай активно продвигает использование интеллектуальных технологий в сфере строительства на угольных шахтах, и система транспортировки в шахтах постепенно развивается от "использования транспортных средств под управлением водителей" к "замене на механизированные средства" и до "беспилотной транспортировки". Транспортировка угля относится к отрасли с высоким уровнем риска. На угольных шахтах нередко происходят несчастные случаи, возникающие при транспортировке угля. Традиционные монорельсовые подъемники требуют присутствия водителя в кабине, но при этом возможны несчастные случаи, вызванные такими факторами, как неправильное управление или неправильная работа водителя, а из-за плохого состояния дорожного полотна у водителей могут возникнуть проблемы со здоровьем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В настоящей публикации описана автоматическая система монорельсового подъемника, управляемого на основе метода цифрового макета, реализующего беспилотное управление монорельсовым подъемником, что позволяет снизить количество персонала в шахте и предотвратить аварии, возникающие в результате неправильного управления или неправильной работы водителя, а также позволяет получить данные о положении монорельсового подъемника под землей и обеспечить высокую эффективность транспортировки с помощью монорельсового подъемника.
[0004] Для решения проблем в настоящем изобретении используются следующие технические решения. Предлагается система автоматического управления монорельсовым подъемником на основе метода цифрового макета. Система автоматического управления включает в себя систему передачи данных, высокоскоростной канал связи, модуль автоматического вождения, модуль датчика железнодорожного перевода стрелки и модуль системы позиционирования, расположенные под землей, а также интеллектуальную систему управления и систему виртуального макета, расположенные на поверхности.
[0005] Система передачи данных включает шахтные светильники, которые расположены на внутренней стене выработки и с определенными интервалами, при этом система передачи данных настроена для передачи данных на поверхности и под землей.
[0006] Высокоскоростная линия связи настроена для передачи данных между модулем датчика железнодорожного переключателя и системой передачи данных, между модулем системы позиционирования и системой передачи данных и между системой передачи данных и интеллектуальной системой управления.
[0007] Модуль автоматического управления соединен с системой передачи данных, модуль автоматического управления расположен на каждом монорельсовом подъемнике, при этом он настроен на управление монорельсовым подъемником для осуществления беспилотного управления.
[0008] Модуль датчиков железнодорожного переключателя включает в себя датчики железнодорожного переключателя, которые расположены на каждом переносном рельсе каждого железнодорожного переключателя, они предназначены для определения состояния соединения и положения каждого переносного рельса для каждого железнодорожного переключателя.
[0009] Модуль системы позиционирования настроен для определения профиля внутренней поверхности выработки для позиционирования устройства слежения и определения географического положения каждого подземного монорельсового подъемника в режиме реального времени, а также для передачи информации о позиционировании и географическом положении в систему передачи данных.
[0010] Обмен данными в обоих направлениях осуществляется между интеллектуальной системой управления и системой передачи данных, обмен данными в обоих направлениях осуществляется между системой передачи данных и модулем датчика железнодорожного переключателя, также обмен данными в обоих направлениях осуществляется между системой передачи данных и модулем системы позиционирования. Между системой виртуального макета и интеллектуальной системой управления осуществляется обмен данными.
[0011] Предпочтительно, в настоящей публикации, интеллектуальная система управления включает блок передачи данных, блок обработки данных и блок управления.
[0012] Блок передачи данных осуществляет обмен данными с модулем датчика железнодорожного стрелочного перевода через систему передачи данных, а также обмен данными с модулем системы позиционирования через систему передачи данных.
[0013] Блок обработки данных получает информацию, переданную блоком передачи данных, кроме того блок обработки данных передает информацию в систему виртуального макета после оптимизации информации.
[0014] Система виртуального макета передает информацию на блок управления, а блок управления посылает команду на блок передачи данных.
[0015] В настоящем изобретении, высокоскоростная линия связи дополнительно настроена для обмена данными между блоком передачи данных и системой передачи данных, между блоком передачи данных и блоком обработки данных, между блоком обработки данных и системой виртуального макета, между системой виртуального макета и блоком управления, а также между блоком управления и блоком передачи данных.
[0016] Предпочтительно, в настоящем изобретении, модуль системы позиционирования включает метку позиционирования и базовую станцию позиционирования.
[0017] Метка позиционирования расположена на внутренней поверхности выработки для сбора информации о профиле внутренней поверхности выработки и предназначена для передачи собранной информации о положении на ближайшую базовую станцию позиционирования.
[0018] Метка позиционирования также расположена на устройстве слежения для позиционирования устройства слежения и предназначена для передачи информации о позиционировании на ближайшую базовую станцию позиционирования.
[0019] Метка позиционирования также расположена на монорельсовом подъемнике для определения географического положения каждого подземного монорельсового подъемника в режиме реального времени и предназначена для передачи информации о географическом положении на ближайшую базовую станцию позиционирования.
[0020] Базовая станция позиционирования расположена в выработке с определенными интервалами, базовая станция позиционирования соединена с меткой позиционирования через беспроводную сеть, базовая станция позиционирования предназначена для получения информации о положении метки позиционирования, а затем передает информацию о положении на устройство передачи данных на поверхности.
[0021] В настоящем изобретении, устройство слежения включает дорожное полотно, монорельсовый путь, цепь и анкерный болт.
[0022] В настоящем изобретении, каждый из шахтных светильников включает первое устройство приема беспроводного сигнала, первое устройство передачи беспроводного сигнала, первое устройство приема беспроводного сигнала LIFI и первое устройство передачи беспроводного сигнала LIFI. Блок передачи данных соответственно соединен с первым устройством приема беспроводного сигнала и первым устройством передачи беспроводного сигнала. Первое устройство приема беспроводного сигнала соединено проводами с первым устройством передачи беспроводного сигнала LIFI, а первое устройство передачи беспроводного сигнала соединено проводами с первым устройством приема беспроводного сигнала LIFI.
[0023] Модуль автоматического управления включает второе беспроводное устройство приема сигнала LIFI, и второе беспроводное устройство приема сигнала LIFI соединено с первым беспроводным устройством передачи сигнала LIFI посредством беспроводной линии связи LIFI.
[0024] Базовая станция позиционирования включает второе беспроводное устройство передачи сигнала LIFI, и второе беспроводное устройство передачи сигнала LIFI соединено с первым беспроводным устройством приема сигнала LIFI через беспроводную линию связи LIFI.
[0025] Модуль датчика железнодорожного переключателя включает третье устройство приема беспроводного сигнала LIFI и третье устройство передачи беспроводного сигнала LIFI. Третье беспроводное устройство приема сигнала LIFI подключено к выходному терминалу первого беспроводного устройства передачи сигнала LIFI через беспроводную линию связи LIFI, а третье беспроводное устройство передачи сигнала LIFI подключено к первому беспроводному устройству приема сигнала LIFI через беспроводную линию связи LIFI.
[0026] Предпочтительно, в настоящем изобретении, способ передачи данных с поверхности под землю заключается в том, что устройство передачи данных передает данные на первое устройство приема беспроводного сигнала, первое устройство приема беспроводного сигнала передает данные на первое устройство передачи беспроводного сигнала LIFI, а затем первое устройство передачи беспроводного сигнала LIFI передает данные на второе устройство приема беспроводного сигнала LIFI и третье устройство приема беспроводного сигнала LIFI соответственно.
[0027] Способ передачи данных из подземного пространства на поверхность заключается в том, что второе беспроводное устройство передачи сигнала LIFI и третье беспроводное устройство передачи сигнала LIFI соответственно передают данные на первое беспроводное устройство приема сигнала LIFI, первое беспроводное устройство приема сигнала LIFI передает данные на первое беспроводное устройство передачи сигнала, а первое беспроводное устройство передачи сигнала передает данные на блок передачи данных.
[0028] Кроме того, предлагается метод автоматического управления монорельсовым подъемником на основе метода виртуального макета. Способ включает в себя следующие этапы:
[0029] На этапе S1 создается статическая модель виртуального макета выработки.
[0030] На этапе S1-1, состояние соединения и положения каждого переносного рельса каждого железнодорожного переключателя, размер поперечного сечения выработки и тенденция прохождения выработки передаются модулем датчика железнодорожного переключателя и модулем системы позиционирования в интеллектуальную систему управления через систему передачи данных.
[0031] На этапе S1-2 полученная информация передается интеллектуальной системой управления в систему виртуального макета.
[0032] На этапе S1-3 статическая модель виртуального макета выработки создается системой виртуального макета в соответствии с полученной информацией.
[0033] На этапе S2 создается модель виртуального макета монорельсового подъемника.
[0034] На этапе S2-1 информация о географическом положении каждого монорельсового подъемника передается модулем системы позиционирования в интеллектуальную систему управления через систему передачи данных.
[0035] На этапе S1-2 информация передается интеллектуальной системой управления в систему виртуального макета.
[0036] На этапе S1-3 статическая модель виртуального макета для каждого монорельсового подъемника независимо создается системой виртуального макета в соответствии с полученной информацией.
[0037] На этапе S3 получается полная статическая модель виртуального макета.
[0038] На этапе S3-1 статическая модель виртуального макета монорельсового подъемника, созданная на этапе S2, импортируется в статическую модель виртуального макета выработки, созданную на этапе S1, для интеграции в полную статическую модель виртуального макета.
[0039] На этапе S4 данные импортируются.
[0040] На этапе S4-1 каждому монорельсовому подъемнику присваивается номер 001, 002, 003.....
[0041] На этапе S4-2 информация о нумерации, полученная на этапе S4-1, импортируется в модуль автоматического управления монорельсового подъемника и модель виртуального макета, соответствующую каждому монорельсовому подъемнику.
[0042] На этапе S5 получают динамическую модель виртуального макета.
[0043] На этапе S5-1 динамическое положение всего корпуса каждого монорельсового подъемника фиксируется модулем системы позиционирования в реальном времени, и динамическое положение всего корпуса каждого монорельсового подъемника передается в интеллектуальную систему управления.
[0044] На этапе S5-2 полученная динамическая информация о положении всего корпуса каждого монорельсового подъемника передается интеллектуальной системой управления в режиме реального времени в полную статическую модель виртуального макета, полученную на этапе S3, для обновления положения виртуального макета каждого монорельсового подъемника в статической модели виртуального макета выработки в режиме реального времени.
[0045] На этапе S5-3 завершается процесс перехода от статических виртуальных макетов к динамическим виртуальным макетам, и получается динамическая информация о положении всего корпуса монорельсового подъемника, соответствующая каждому номеру в выработке, для получения динамической модели виртуального макета каждого монорельсового подъемника в выработке.
[0046] На этапе S6 выполняется беспилотное управление перемещением монорельсового подъемника.
[0047] В S6-1 система виртуального макета подключается к блоку управления интеллектуальной системы управления.
[0048] На этапе S6-2 данные для динамического виртуального макета на этапе S5 считываются блоком управления в режиме реального времени, и считанные данные анализируются.
[0049] На этапе S6-3, в соответствии с анализом на этапе S6-2, блок управления выдает соответствующую инструкцию, соответствующая инструкция передается на блок приема данных, и блок приема данных передает инструкцию на модуль автоматического управления через систему передачи данных.
[0050] На этапе S6-4 беспилотное управление осуществляется модулем автоматического управления на соответствующем монорельсовом подъемнике.
[0051] Предпочтительно, в настоящем изобретении, метод дополнительно включает этап 7, осуществляемый перед этапом 3, при этом этап 7 заключается в следующем.
[0052] На этапе 7 создается статическая модель виртуального макета устройства слежения.
[0053] На этапе S7-1 географические положения выработки, пути монорельсового подъемника, положения цепи и анкерного болта определяются с помощью позиционирования в модуле системы позиционирования.
[0054] На этапе S7-2 информация о географическом положении устройства слежения, полученная на этапе S7-1, передается в интеллектуальную систему управления через систему передачи данных.
[0055] На этапе S7-3 полученная информация передается интеллектуальной системой управления в систему виртуального макета.
[0056] На этапе S7-4 статическая модель виртуального макета устройства слежения создается системой виртуального макета в соответствии с полученной информацией.
[0057] Благодаря вышеуказанным техническим решениям, настоящее изобретение имеет следующие преимущества по сравнению с предшествующим уровнем техники.
[0058] 1. В настоящем раскрытии, каждый монорельсовый подъемник пронумерован, и состояние каждого пронумерованного монорельсового подъемника определяется посредством модуля определения состояния в модуле автоматического управления, т.е. режим работы/ режим ожидания.
[0059] 2. Интеллектуальная система управления, представленная в настоящем изобретении, пропускает монорельсовый подъемник в режиме работы при поиске монорельсового подъемника в динамической модели виртуального макета.
[0060] 3. В настоящем изобретении используется технология позиционирования в сверхшироком диапазоне, сигнал сверхширокого диапазона имеет сильную проникающую способность, что может решить проблему блокировки препятствий в процессе позиционирования, и может дополнительно реализовать точное позиционирование монорельсового подъемника, и получить позиции, где механическое оборудование и персонал должны быть перемещены монорельсовым подъемником, запустить ближайший монорельсовый подъемник в нерабочем состоянии, и реализовать высокую эффективность запуска для монорельсового подъемника.
[0061] 4. В настоящем изобретении применяется технология виртуального макета для автоматического управления монорельсовым подъемником, что позволяет реализовать беспилотное управление монорельсовым подъемником, уменьшить затраты на персонал в шахте и избежать несчастных случаев, вызванных неправильным управлением или работой водителя.
[0062] 5. Устройство позиционирования может быть расположено на операторе посредством воспроизведения трехмерной модели для подземной выработки в настоящем изобретении. Когда по особым причинам происходит аварийное обрушение шахты и персонал оказывается в ловушке, трехмерный виртуальный макет поможет быстро найти и спасти персонал, чтобы обеспечить его безопасность.
[0063] 6. Шахтные светильники, принятые в настоящем изобретении, используются для освещения, а система передачи данных используется в качестве посредника для передачи данных между поверхностью и под землей.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
[0064] Настоящее раскрытие дополнительно описано ниже в сочетании с прилагаемыми чертежами и вариантами осуществления.
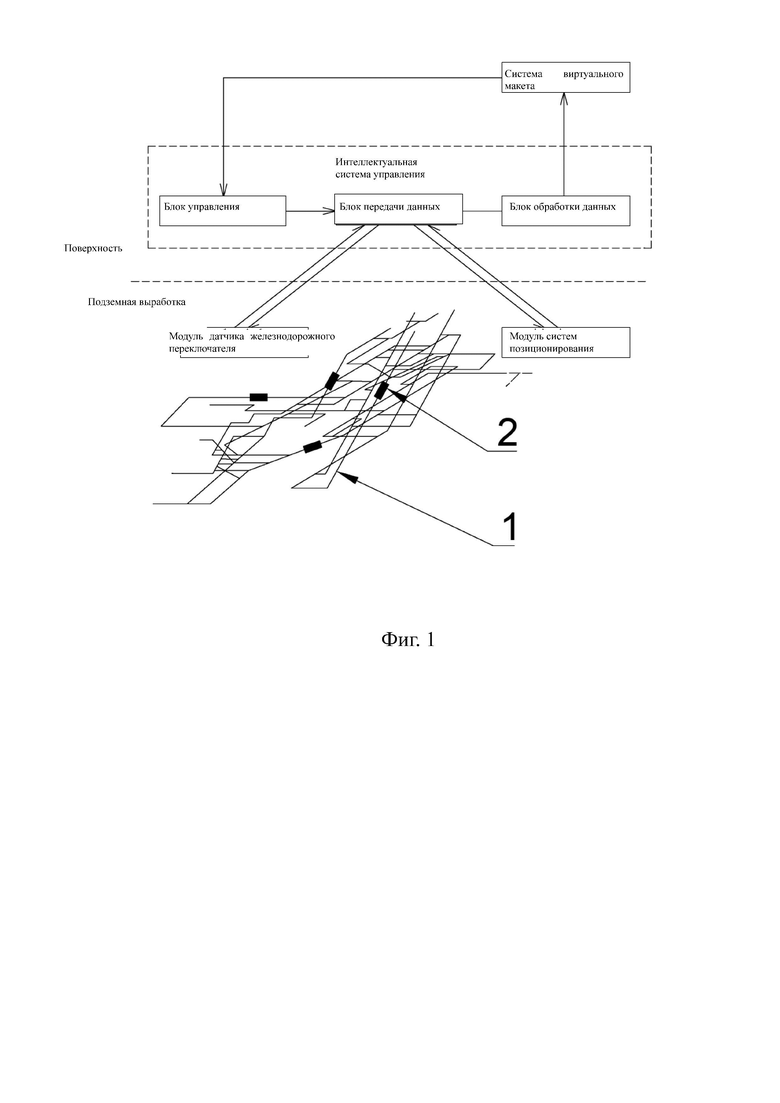
[0065] На ФИГ. 1 показана принципиальная схема системы автоматического управления в настоящем изобретении.
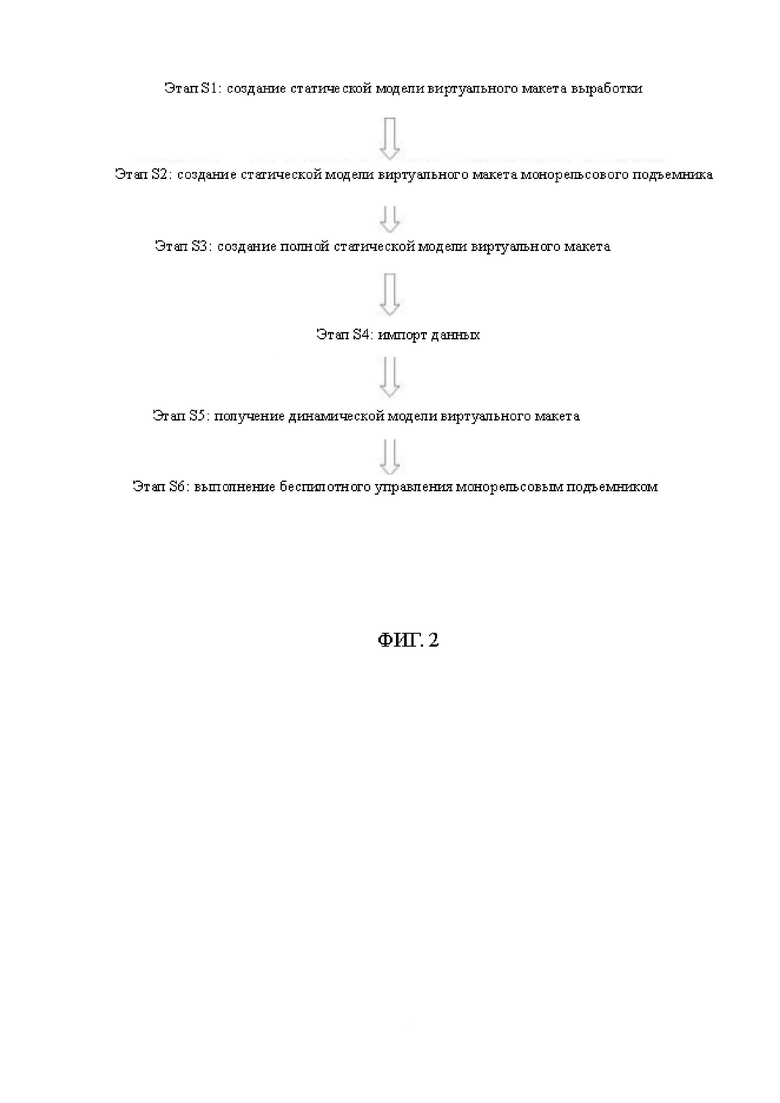
[0066] На ФИГ. 2 показана блок-схема метода автоматического управления в настоящем изобретении.
[0067] На чертежах: 1 - выработка; 2 - монорельсовый подъемник.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0068] Настоящее изобретение более подробно описывается ниже со ссылкой на сопроводительные чертежи. Все эти чертежи являются упрощенными схемами и просто иллюстрируют основную конструкцию настоящего изобретения, поэтому на них показаны только компоненты, относящиеся к настоящему изобретению.
[0069] В описании настоящего изобретения следует понимать, что ориентация или положения, обозначенные терминами "левый", "правый", "верхний", "нижний" и т.п., основаны на ориентации или положениях, проиллюстрированных на сопроводительных чертежах, и только для удобства описания настоящего изобретения и упрощения описания, а не указывая или подразумевая, что упомянутые устройства или элементы должны иметь конкретную ориентацию, быть сконструированы и работать в конкретной ориентации. "Первый", "второй" и т.п. не указывают на важность компонентов и поэтому не могут быть истолкованы как ограничения настоящего изобретения. Конкретные размеры, используемые в этих вариантах осуществления, предназначены только для иллюстрации технических решений и не ограничивают область защиты настоящего изобретения.
[0070] Вариант осуществления 1
[0071] В данном варианте осуществления изобретения предлагается предпочтительный вариант реализации, который представляет собой автоматическую систему управления монорельсовым подъемником, основанную на виртуальном макете. Как показано на ФИГ. 1, вышеупомянутая система автоматического управления включает в себя систему передачи данных, высокоскоростную линию связи, модуль автоматического управления, модуль датчика железнодорожного переключателя и модуль системы позиционирования, расположенные под землей, а также интеллектуальную систему управления и систему виртуального макета, расположенные на поверхности.
[0072] Обмен данными осуществляется между интеллектуальной системой управления и системой передачи данных, кроме того обмен данными осуществляется между интеллектуальной системой управления и системой виртуального макета, а также между системой передачи данных и модулем датчика железнодорожного переключателя, между системой передачи данных и модулем системы позиционирования.
[0073] Интеллектуальная система управления включает в себя блок передачи данных, блок обработки данных и блок управления. Блок передачи данных осуществляет обмен данными с модулем датчика железнодорожного переключателя через систему передачи данных. Блок передачи данных осуществляет обмен данными с модулем системы позиционирования через систему передачи данных. Блок обработки данных получает информацию, переданную блоком передачи данных, а также передает информацию в систему виртуального макета после оптимизации информации. Система виртуального макета передает информацию на блок управления, а блок управления посылает команду на блок передачи данных.
[0074] Система виртуального макета включает программное обеспечение для трехмерного моделирования, при этом программное обеспечение для трехмерного моделирования предназначено для создания виртуального макета. Система виртуального макета отображает в реальном времени положение каждого подземного монорельсового подъемника 2 и визуальную информацию о состоянии соединения и положения каждого переносного рельса каждого подземного железнодорожного переключателя. Изменение пути переносного рельса управляется контроллером переносного рельса, при этом контроллер переносного рельса соединен с блоком передачи данных.
[0075] Модуль датчика железнодорожного переключателя включает в себя множество датчиков железнодорожного переключателя, которые расположены на каждом переносном рельсе каждого железнодорожного переключателя по одному на каждом. Датчики железнодорожного переключателя настроены на определение состояния соединения и положения каждого переносного рельса каждого железнодорожного переключателя и передают полученную информацию на блок передачи данных в интеллектуальной системе управления через систему передачи данных.
[0076] В модуле системы позиционирования используется технология позиционирования в сверхшироком диапазоне частот. Модуль системы позиционирования включает в себя множество меток позиционирования и множество базовых станций позиционирования. Метки позиционирования расположены на монорельсовом подъемнике 2, внутренней поверхности выработки 1 и устройстве слежения. Устройство слежения включает в себя выработку 1, рельс монорельсового подъемника (включая железнодорожный переключатель), цепь и анкерный болт, то есть выработка 1, рельс монорельсового подъемника (включая железнодорожный переключатель), цепь и анкерные болты снабжены метками позиционирования. Информация о географическом положении монорельсового подъемника 2, размере поперечного сечения на внутренней поверхности выработки 1 и географических положениях выработки 1, рельсе монорельсового подъемника (включая железнодорожный переключатель), цепи и анкерного болта в устройстве слежения воспринимается с помощью меток позиционирования, и воспринятая информация передается на блок передачи данных в интеллектуальной системе управления. Метки позиционирования на внутренней поверхности выработки 1 расположены по определенному правилу (правило расположения: эффект расположения может максимально отражать профиль выработки 1). Метки позиционирования настроены таким образом, чтобы улавливать точечные профили выработки. На компьютере применяется алгоритм подгонки дискретизированных точечных профилей к непрерывному профилю криволинейной поверхности, то есть получается трехмерная модель выработки 1, трехмерная модель включает размер поперечного сечения и направление прохождения выработки 1. Базовая станция позиционирования устанавливается через каждые 150-200 метров в выработке 1, а метка позиционирования связана с базовой станцией позиционирования через беспроводную сеть. Базовая станция позиционирования получает информацию о положении метки позиционирования, а затем передает информацию о положении на блок передачи данных на поверхности. Кроме того, метки позиционирования, расположенные на переднем и заднем концах каждого монорельсового подъемника 2, настроены на определение географического положения всего корпуса каждого монорельсового подъемника 2 в режиме реального времени, и передают информацию на ближайшую базу позиционирования через беспроводную сеть, а также передают информацию на блок передачи данных в интеллектуальном блоке управления через систему передачи данных.
[0077] Высокоскоростная линия связи используется для передачи данных между модулем датчика железнодорожного переключателя и системой передачи данных, между модулем системы позиционирования и системой передачи данных, между блоком передачи данных и системой передачи данных, между блоком передачи данных и блоком обработки данных, между блоком обработки данных и системой виртуального макета, между системой виртуального макета и блоком управления, а также между блоком управления и блоком передачи данных.
[0078] Модуль автоматического управления подключен к блоку передачи данных в интеллектуальной системе управления через систему передачи данных. Модуль автоматического управления, расположенный на переднем и заднем концах каждого монорельсового подъемника 2 управляет монорельсовым подъемником 2 для осуществления беспилотного вождения.
[0079] В данном варианте осуществления изобретения также предусмотрен метод автоматического управления монорельсовым подъемником на основе виртуального макета. Как показано на рис. 2, способ автоматического управления включает в себя следующие этапы.
[0080] На этапе S1 создается статическая модель виртуального макета выработки.
[0081] На этапе S1-1, датчик железнодорожного переключателя в модуле датчика железнодорожного переключателя передает состояние соединения и положения каждого переносного рельса в каждом железнодорожном переключателе, а метки позиционирования передают собранные точечные профили выработки в интеллектуальную систему управления через систему передачи данных.
[0082] На этапе S1-2 полученная информация передается интеллектуальной системой управления в систему виртуального макета.
[0083] На этапе S1-3 статическая модель виртуального макета выработки создается системой виртуального макета в соответствии с полученной информацией, при этом статическая модель виртуального макета выработки включает размер поперечного сечения и направление прохождения выработки 1.
[0084] На этапе S2 создается модель виртуального макета монорельсового подъемника.
[0085] На этапе S2-1 информация о географическом положении каждого монорельсового подъемника 2 передается модулем системы позиционирования в интеллектуальную систему управления через систему передачи данных.
[0086] На этапе S1-2 информация передается интеллектуальной системой управления в систему виртуального макета.
[0087] На этапе S1-3 статическая модель виртуального макета для каждого монорельсового подъемника 2 создается системой виртуального макета отдельно в соответствии с полученной информацией.
[0088] На этапе S3 получается полная статическая модель виртуального макета.
[0089] На этапе S3-1 статическая модель виртуального макета монорельсового подъемника, созданная на этапе S2, импортируется в статическую модель виртуального макета выработки, созданную на этапе S1, для интеграции в полную статическую модель виртуального макета.
[0090] На этапе S4 данные импортируются.
[0091] На этапе S4-1, каждый монорельсовый подъемник 2 нумеруется последовательно 001, 002, 003 ...
[0092] На этапе S4-2 информация о нумерации, полученная на этапе S4-1, импортируется в модуль автоматического управления монорельсовым подъемником 2 и модель виртуального макета, соответствующую каждому монорельсовому подъемнику 2.
[0093] На этапе S5 получают динамическую модель виртуального макета.
[0094] На этапе S5-1 динамическое положение корпуса каждого монорельсового подъемника 2 фиксируется модулем системы позиционирования в реальном времени, и динамическое положение корпуса каждого монорельсового подъемника передается в интеллектуальную систему управления.
[0095] На этапе S5-2 полученная динамическая информация о положении корпуса каждого монорельсового подъемника 2 передается интеллектуальной системой управления в режиме реального времени в полную статическую модель виртуального макета, полученную на этапе S3, для обновления положения виртуального макета каждого монорельсового подъемника 2 в статической модели виртуального макета выработки в режиме реального времени.
[0096] На этапе S5-3 завершается процесс перехода от статических виртуальных макетов к динамическим виртуальным макетам, при этом получается динамическая информация о положении корпуса монорельсового подъемника 2, соответствующая каждому номеру на выработке, для получения динамической модели виртуального макета каждого монорельсового подъемника 2 в выработке.
[0097] На этапе S6 выполняется беспилотное управление движением монорельсового подъемника 2.
[0098] В S6-1 система виртуального макета подключается к блоку управления интеллектуальной системы управления.
[0099] На этапе S6-2 данные для динамического виртуального макета на этапе S5 считываются блоком управления в режиме реального времени, и считанные данные анализируются.
[00100] На этапе S6-3, в соответствии с анализом на этапе S6-2, блок управления выдает соответствующую инструкцию, соответствующая инструкция передается на блок приема данных, и блок приема данных передает инструкцию на модуль автоматического управления через систему передачи данных.
[00101] На этапе S6-4 беспилотное управление осуществляется модулем автоматического управления на соответствующем монорельсовом подъемнике 2.
[00102] Также, модуль автоматического управления включает в себя модуль определения состояния и модуль управления монорельсовым подъемником 2.
[00103] Модуль определения состояния предназначен для определения двух рабочих режимов монорельсового подъемника 2, одно из которых является рабочим режимом а другое - режимом ожидания. Кроме того, на подъемной цепи монорельсового подъемника 2 установлен датчик напряжения. Когда значение напряжения, измеренное датчиком напряжения на подъемной цепи, превышает заданный диапазон, модуль автоматического управления определяет, что монорельсовый подъемник 2 находится в режиме работы. Модуль автоматического управления передает сигнал состояния монорельсового подъемника 2 в интеллектуальную систему управления на поверхности, а затем интеллектуальная система управления передает сигнал состояния монорельсового подъемника 2 на виртуальный макет, при этом состояние монорельсового подъемника 2, соответствующее динамическому цифровому модулю в системе виртуального макета, отмечается как режим работы. Когда значение напряжения, измеренное датчиком напряжения, не превышает заданный диапазон, модуль автоматического управления определяет, что монорельсовый подъемник 2 находится в режиме остановки, модуль автоматического управления передает сигнал состояния монорельсового подъемника в интеллектуальную систему управления на поверхности, а интеллектуальная система управления передает сигнал состояния в систему виртуального макета, и монорельсовый подъемник 2, соответствующий динамической модели виртуального макета в системе виртуального макета, отмечается как состояние остановки.
[00104] Модуль управления монорельсового подъемника 2 расположен на монорельсовом подъемнике 2, при этом модуль управления монорельсового подъемника 2 принимает команду управления, переданную блоком передачи данных, и выполняет автоматическое управление монорельсовым подъемником 2 в соответствии с этой командой.
[00105] Конкретные методы запуска, связанные с методом автоматического управления, следующие:
[00106] Интеллектуальная система управления определяет трехмерное поперечное сечение и направление прохождения подземной выработки 1, определяет положение, в котором находится каждый монорельсовый подъемник 2, и его соответствующий номер, а также считывает географическое положение, в котором находится железнодорожный переключатель, и состояние соединения-позиции переносного рельса в железнодорожном переключателе.
[00107] Когда монорельсовый подъемник 2 должен выполнить транспортировку после того, как другой монорельсовый подъемник 2 перевез механическое оборудование или персонал в точку транспортировки назначенного монорельсового подъемника 2, интеллектуальная система управления немедленно определяет положение точки передачи и целевой точки для транспортировки, после определения точки передачи и целевой точки в интеллектуальную систему управления встраивается алгоритм искусственного интеллекта, интеллектуальная система управления ищет ближайший к точке транспортировки монорельсовый подъемник 2, находящийся в режиме ожидания в созданной динамической модели виртуального макета с помощью алгоритма искусственного интеллекта.
[00108] При планировании пути между точкой транспортировки и целевой точкой в качестве оптимального пути ищется требуемый путь с более коротким и низким уклоном выработки 1. Кроме того, когда интеллектуальная система управления ищет монорельсовый подъемник 2, который находится ближе всего к точке транспортировки и находится в режиме ожидания с помощью алгоритмов искусственного интеллекта, монорельсовый подъемник 2, который отмечен как работающий, будет проигнорирован, и поиск будет вестись только по монорельсовому подъемнику 2, который отмечен как находящийся в режиме ожидания.
[00109] После определения пути движения интеллектуальная система управления сначала отмечает положения точки транспортировки и целевой точки, а также оптимальный путь движения в динамической модели виртуального макета, и после определения монорельсового подъемника 2, который находится ближе всего к точке транспортировки в режиме ожидания, интеллектуальная система управления посылает команду модулю автоматического управления монорельсовым подъемником 2 через высокоскоростную линию связи. Модуль автоматического управления управляет монорельсовым подъемником 2 для перемещения в точку передачи для завершения погрузки механического оборудования или персонала. После завершения процесса передачи автоматический модуль управления приводит в движение монорельсовый подъемник 2 для достижения целевой точки по оптимальной траектории. Затем осуществляется анализ оцифрованной трехмерной информации и управление работой монорельсового подъемника 2 через модуль автоматического управления на монорельсовом подъемнике 2, и реализуется эффективный и упорядоченный запуск каждого подземного монорельсового подъемника 2, управляемый с поверхности.
[00110] Далее, метод автоматического управления связан с управлением железнодорожным переключателем, управление железнодорожным переключателем относится к тому, что когда интеллектуальная система управления посылает команду на модуль автоматического управления, и модуль автоматического управления управляет монорельсовым подъемником 2 для перемещения к целевой точке, он неизбежно столкнется с железнодорожным переключателем, в это время интеллектуальная система управления должна считать данные в динамической модели виртуального макета. Когда интеллектуальная система управления рассчитывает, что расстояние от монорельсового подъемника 2 в динамической модели виртуального макета до переднего железнодорожного переключателя находится в пределах заданного диапазона с помощью алгоритмов искусственного интеллекта, интеллектуальная система управления сначала считывает информацию о положении железнодорожного переключателя в данный момент в динамической модели виртуального макета, в случае, если переносной рельс в железнодорожном переключателе находится в правильном положении в данный момент, интеллектуальная система управления не дает никакой реакции; в случае, когда переносной рельс в железнодорожном переключателе не находится в правильном положении в данный момент, интеллектуальная система управления посылает команду контроллеру переносного рельса, и контроллер переносного рельса управляет рельсом для поворота в правильное положение, так чтобы монорельсовый подъемник 2 двигался плавно.
[00111] Кроме того, система передачи данных включает в себя шахтные светильники, расположенные на внутренней стене выработки 1 с определенными интервалами. В изобретении используется первое устройство приема беспроводного сигнала, первое устройство передачи беспроводного сигнала, первое устройство приема беспроводного сигнала LIFI и первое устройство передачи беспроводного сигнала LIFI. Блок передачи данных соответственно соединен с первым устройством приема беспроводного сигнала и первым устройством передачи беспроводного сигнала. Первое устройство приема беспроводного сигнала соединено проводами с первым устройством передачи беспроводного сигнала LIFI, а первое устройство передачи беспроводного сигнала соединено проводами с первым устройством приема беспроводного сигнала LIFI.
[00112] Модуль автоматического управления включает второе беспроводное устройство приема сигнала LIFI, и второе беспроводное устройство приема сигнала LIFI соединено с первым беспроводным устройством передачи сигнала LIFI посредством беспроводной линии связи LIFI.
[00113] Базовая станция позиционирования включает второе беспроводное устройство передачи сигнала LIFI, и второе беспроводное устройство передачи сигнала LIFI соединено с первым беспроводным устройством приема сигнала LIFI через беспроводную линию связи LIFI.
[00114] Модуль датчика железнодорожного переключателя включает третье беспроводное устройство приема сигнала LIFI и третье беспроводное устройство передачи сигнала LIFI, причем третье беспроводное устройство приема сигнала LIFI соединено с выходным терминалом первого беспроводного устройства передачи сигнала LIFI через беспроводную линию связи LIFI. Третье беспроводное устройство передачи сигнала LIFI соединено с первым беспроводным устройством приема сигнала LIFI через беспроводную линию связи LIFI.
[00115] Способ передачи данных с поверхности под землю заключается в следующем: блок передачи данных передает данные на первое устройство приема беспроводного сигнала, первое устройство приема беспроводного сигнала передает данные на первое устройство передачи беспроводного сигнала LIFI, а затем первое устройство передачи беспроводного сигнала LIFI передает данные на второе устройство приема беспроводного сигнала LIFI и третье устройство приема беспроводного сигнала LIFI соответственно.
[00116] Способ передачи данных из-под земли на поверхность заключается в следующем: второе устройство беспроводной передачи сигнала LIFI и третье устройство беспроводной передачи сигнала LIFI соответственно передают данные на первое устройство беспроводного приема сигнала LIFI, первое устройство беспроводного приема сигнала LIFI передает данные на первое устройство беспроводной передачи сигнала, а первое устройство беспроводной передачи сигнала передает данные на блок передачи данных.
[00117] Процесс передачи информации для управления (предназначенной для беспилотного автоматического управления монорельсовым подъемником 2) с поверхности под землю происходит следующим образом: устройство передачи данных (через высокоскоростную линию связи) первый модуль приема беспроводных сигналов (через проводную цепь) первое устройство передачи беспроводных сигналов LIFI (через линию беспроводной связи LIFI) второе устройство приема беспроводных сигналов LIFI (модуль автоматического привода) и третье устройство приема беспроводных сигналов LIFI (управление железнодорожным переключателем).
[00118] Процесс передачи информации о железнодорожном переключателе и информации о положении (для обновления виртуального макета) из-под земли на поверхность происходит следующим образом: второе устройство беспроводной передачи сигнала LIFI (информация о положении) и третье устройство беспроводной передачи сигнала LIFI (информация о железнодорожном переключателе) (через беспроводную линию связи LIFI) первое устройство беспроводного приема сигнала LIFI (через проводную цепь) первый модуль беспроводной передачи сигнала (через высокоскоростную линию связи) блок передачи данных. Все они являются посредниками при передаче данных.
[00119] Затем модуль системы позиционирования передает информацию о положении на метках позиционирования на ближайшую базовую станцию позиционирования, базовая станция позиционирования передает информацию о положении в систему передачи данных с помощью второго устройства передачи беспроводного сигнала LIFI по беспроводной линии связи LIFI, чтобы определить профиль внутренней поверхности выработки 1 и информацию о положении под землей монорельсового подъемника 2 и устройства слежения. Третье беспроводное передающее устройство LIFI встроено в модуль датчика железнодорожного переключателя, модуль датчика железнодорожного переключателя передает информацию о железнодорожном переключателе в систему передачи данных с помощью третьего беспроводного передающего устройства LIFI по беспроводному каналу связи LIFI, информация передается первым беспроводным передающим устройством LIFI на цифровой приемопередающий блок, а затем информация передается на динамический модуль виртуального макета в системе виртуального макета после обработки блоком обработки данных. Система виртуального макета обновляет динамический модуль виртуального макета в режиме реального времени в соответствии с информацией, собранной каждым датчиком железнодорожного переключателя в модуле железнодорожных датчиков, и информацией о положении (включая монорельсовый подъемник 2, выработку 1 и устройство слежения), собранной метками позиционирования, и преобразует реальную трехмерную информацию о выработке шахты и состоянии работы монорельсового подъемника в цифровую трехмерную информацию в виртуальном мире, тем самым завершая процесс передачи данных.
[00120] Датчик железнодорожного переключателя, контроллер железнодорожного переключателя, третье беспроводное устройство приема сигнала LIFI и третье беспроводное устройство передачи сигнала LIFI расположены на железнодорожном переключателе.
[00121] Контроллер железнодорожного переключателя установлен на каждом переносном рельсе в каждой выработке 1 для управления поворотом рельса на железнодорожном переключателе, а датчик железнодорожного переключателя передает информацию о состоянии положения соединения переносного рельса в железнодорожном переключателе на третье беспроводное устройство передачи сигнала LIFI, и затем третье устройство беспроводной передачи сигнала LIFI передает информацию о состоянии положения соединения переносного рельса в железнодорожном выключателе на первое устройство беспроводного приема сигнала LIFI внутри шахтного светильника, и первое устройство беспроводного приема сигнала LIFI передает информацию на блок обработки данных, затем информация передается на динамический модуль виртуального макета в системе виртуального макета через блок обработки данных. Когда интеллектуальная система управления на поверхности определяет, что переносной рельс в определенном железнодорожном переключателе необходимо повернуть, блок управления посылает управляющий сигнал и передает управляющий сигнал на блок передачи данных, а затем блок передачи данных передает управляющую инструкцию на шахтный светильник, первое беспроводное устройство передачи сигнала LIFI в шахтном светильнике передает управляющий сигнал третьему беспроводному устройству приема сигнала LIFI на железнодорожном переключателе, а третье беспроводное устройство приема сигнала LIFI передает управляющий сигнал контроллеру железнодорожного переключателя, контроллер железнодорожного переключателя управляет железнодорожным переключателем для поворота в правильное положение, чтобы обеспечить плавный проход монорельсового подъемника 2. Когда требуется автоматическое управление монорельсовым подъемником 2, блок передачи данных в интеллектуальной системе управления передает управляющий сигнал на первое беспроводное устройство передачи сигнала LIFI внутри шахтного светильника, первое беспроводное устройство передачи сигнала LIFI внутри шахтного светильника передает управляющую информацию на второе беспроводное устройство приема сигнала LIFI в модуле автоматического привода через беспроводную связь LIFI, так что монорельсовый подъемник 2 управляется модулем автоматического управления для беспилотного запуска.
[00122] Данный вариант осуществления изобретения дополнительно включает этап 7, выполненный перед этапом 3, при этом этап 7 заключается в следующем.
[00123] На этапе 7 создается статическая модель виртуального макета устройства слежения.
[00124] На этапе S7-1 географические положения выработки 1, пути монорельсового подъемника (включая железнодорожный переключатель), цепи и анкерного болта определяются множеством меток позиционирования в модуле системы позиционирования.
[00125] На этапе S7-2 информация о географическом положении устройства слежения, полученная на этапе S7-1, передается в интеллектуальную систему управления через систему передачи данных.
[00126] На этапе S7-3 полученная информация передается интеллектуальной системой управления в систему виртуального макета.
[00127] На этапе S7-4 статическая модель виртуального макета устройства слежения создается системой виртуального макета в соответствии с полученной информацией.
[00128] Статическая модель виртуального макета устройства слежения, созданная на этапе S7, и статическая модель виртуального макета монорельсового подъемника, созданная на этапе S2, импортируются в статическую модель виртуального макета выработки, созданную на этапе S1, для интеграции в полную статическую модель виртуального макета, которая может имитировать подземную среду более четко и детально, и удобна для визуального наблюдения за движением монорельсового подъемника 2.
[00129] В этом варианте осуществления изобретения все монорельсовые подъемники 2 пронумерованы, и состояние каждого пронумерованного монорельсового подъемника определяется как режим работы/ожидания с помощью модуля определения состояния в модуле автоматического управления.
[00130] Интеллектуальная система управления, представленная в настоящем варианте изобретения, пропускает монорельсовый подъемник в режиме работы при поиске монорельсового подъемника 2 в динамической модели виртуального макета.
[00131] В настоящем изобретении используется технология позиционирования в сверхшироком диапазоне, сигнал сверхширокого диапазона имеет сильную проникающую способность, что может решить проблему блокировки препятствий в процессе позиционирования, и может дополнительно реализовать точное позиционирование монорельсового подъемника 2, и получить позиции, где механическое оборудование и персонал должны быть перемещены монорельсовым подъемником, запустить ближайший монорельсовый подъемник в нерабочем состоянии, и реализовать высокую эффективность запуска для монорельсового подъемника.
[00132] В настоящем варианте изобретения применяется технология виртуального макета для автоматического управления монорельсовым подъемником 2, что позволяет реализовать беспилотное управление монорельсовым подъемником, уменьшить затраты на персонал в шахте и избежать несчастных случаев, вызванных неправильным управлением или работой водителя.
[00133] Устройство позиционирования может быть расположено на операторе посредством воспроизведения трехмерной модели для подземной выработки в настоящем изобретении. Когда по особым причинам происходит аварийное обрушение шахты и персонал оказывается в ловушке, трехмерный виртуальный макет поможет быстро найти и спасти персонал, чтобы обеспечить его безопасность.
[00134] В этом варианте осуществления шахтный светильник используется не только для освещения, но и в качестве посредника для передачи данных между поверхностью и подземной выработкой через первое устройство LIFI в шахтном светильнике.
[00135] Специалистам в данной области будет понятно, что, если не определено иное, все термины (включая технические термины и научную терминологию), используемые в настоящем документе, имеют то же значение, которое обычно понимается специалистами в данной области. Следует также понимать, что термины, подобные тем, которые определены в общем глоссарии, следует понимать как имеющие значения, соответствующие их значениям в контексте предшествующего уровня техники, и, если их определение не соответствует настоящему документу, не толкуются в идеалистических или чрезмерно формальных значениях.
[00136] Значение "и/или", описанное в настоящем изобретении, включает ситуации, когда каждое из этих слов используется отдельно или совместно.
[00137] Значение термина "соединение", описанного в настоящем изобретении, может быть включать прямое соединение между компонентами или опосредованное соединение между компонентами через другие компоненты.
[00138] В соответствии с идеальными вариантами осуществления настоящего изобретения и на основе вышеприведенных описаний, соответствующий персонал будет вносить различные изменения и модификации, не отступая от технических идей настоящего изобретения. Технический объем настоящего изобретения не ограничивается содержанием описания изобретения, данный объем определяется в зависимости от содержания формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ УКАЗАНИЯ ВЫДЕЛЕНИЯ РЕСУРСОВ ВРЕМЕННОЙ ОБЛАСТИ ДЛЯ ФИЗИЧЕСКОГО СОВМЕСТНО ИСПОЛЬЗУЕМОГО КАНАЛА НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ ДО RRC-СОЕДИНЕНИЯ | 2019 |
|
RU2754866C1 |
| МЕХАНИЗМ СИГНАЛИЗАЦИИ НАЗНАЧЕНИЯ ВРЕМЕННЫХ РЕСУРСОВ ДЛЯ ПЕРЕДАЧИ СООБЩЕНИЯ MSG3 | 2019 |
|
RU2741567C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2020 |
|
RU2793700C1 |
| Интеллектуальная интегрированная система управления диспетчеризацией кронблока | 2022 |
|
RU2835835C2 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛИЗАЦИИ О НАЗНАЧЕНИИ РЕСУРСОВ ЧАСТОТНОЙ ОБЛАСТИ | 2019 |
|
RU2743667C1 |
| СИСТЕМА И СПОСОБ ВНУТРЕННЕГО ВИДЕОКОНТРОЛЯ УСТРОЙСТВА GIS | 2015 |
|
RU2653109C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ДОСТУПА К СЕРВЕРУ | 2015 |
|
RU2667795C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМ ТЕРМИНАЛЬНЫМ УСТРОЙСТВОМ | 2013 |
|
RU2613775C2 |
| Устройство построения прогнозных энергосберегающих графиков движения поездов | 2018 |
|
RU2685368C1 |
| СПОСОБ ВЫВОДА АУДИО И ТЕРМИНАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2801100C1 |
Настоящее изобретение применяется в области горнодобывающего оборудования и, в частности, относится к автоматической системе управления монорельсовым подъемником на основании метода виртуального макета. Система включает модуль датчика железнодорожного переключателя, модуль системы позиционирования, систему передачи данных, интеллектуальную систему управления, систему виртуального макета и модуль автоматического управления. Модуль датчика железнодорожного переключателя предназначен для определения состояния соединения и положения переносного рельса в железнодорожном переключателе монорельсового подъемника. Система передачи данных предназначена для передачи данных на поверхности и под землей. Обмен данными осуществляется между интеллектуальной системой управления и модулем датчика железнодорожного переключателя, двунаправленная передача осуществляется между интеллектуальной системой управления и модулем системы позиционирования, также обмен данными осуществляется между системой виртуального макета и интеллектуальной системой управления. Метод применяет технологию виртуального макета для автоматического управления монорельсовым подъемником. Благодаря запуску модуля автоматического управления для монорельсового подъемника уменьшается количество персонала, необходимого для работы на шахте, предотвращаются несчастные случаи, вызванные неправильным управлением или неправильной работой оператора. 2 н. и 6 з.п. ф-лы, 2 ил.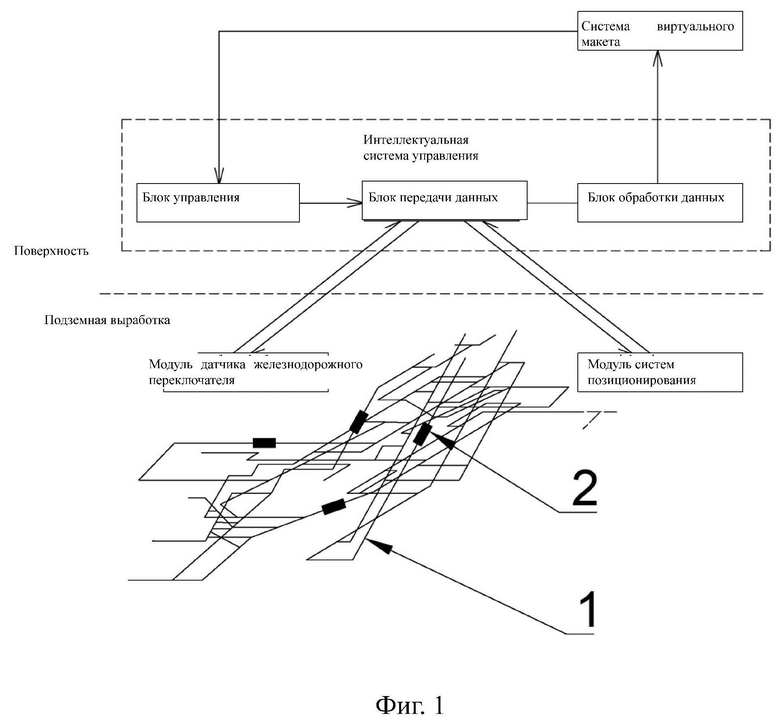
1. Система автоматического управления монорельсовым подъемником на основе виртуального макета, которая включает в себя систему передачи данных, высокоскоростную линию связи, модуль автоматического управления, модуль датчика железнодорожного переключателя и модуль системы позиционирования, расположенные под землей, и интеллектуальную систему управления, и систему виртуального макета, расположенные на поверхности, где
система передачи данных включает шахтные светильники, которые расположены на внутренней стене выработки и с определенными интервалами, при этом система передачи данных настроена для передачи данных на поверхности и под землей;
высокоскоростная линия связи настроена для передачи данных между модулем датчика железнодорожного переключателя и системой передачи данных, между модулем системы позиционирования и системой передачи данных и между системой передачи данных и интеллектуальной системой управления;
модуль автоматического управления подключен к системе передачи данных, он расположен на каждом монорельсовом подъемнике, и предназначен для беспилотного управления монорельсовым подъемником, модуль автоматического управления включает модуль определения состояния и модуль управления монорельсовым подъемником, где модуль определения состояния предназначен для определения двух рабочих состояний монорельсового подъемника, одно из которых является режимом работы, а другое - режимом ожидания; датчик напряжения расположен на подъемной цепи монорельсового подъемника, когда значение напряжения, измеренное датчиком напряжения на подъемной цепи, превышает заданный диапазон, модуль автоматического управления определяет, что монорельсовый подъемник находится в режиме работы; когда значение напряжения, измеренное датчиком напряжения на подъемной цепи, не превышает заданный диапазон, модуль автоматического управления определяет, что монорельсовый подъемник находится в режиме ожидания;
поиск ближайшего к точке транспортировки монорельсового подъемника, находящегося в режиме ожидания, осуществляется интеллектуальной системой управления с помощью алгоритма искусственного интеллекта;
модуль датчиков железнодорожного переключателя включает в себя датчики железнодорожного переключателя, которые расположены на каждом переносном рельсе каждого железнодорожного переключателя, они предназначены для определения состояния соединения и положения каждого переносного рельса для каждого железнодорожного переключателя;
модуль системы позиционирования настроен для определения профиля внутренней поверхности выработки для позиционирования устройства слежения и определения географического положения каждого подземного монорельсового подъемника в режиме реального времени, а также для передачи информации о позиционировании и географическом положении в систему передачи данных;
обмен данными в обоих направлениях осуществляется между интеллектуальной системой управления и системой передачи данных, обмен данными в обоих направлениях осуществляется между системой передачи данных и модулем датчика железнодорожного переключателя, также обмен данными в обоих направлениях осуществляется между системой передачи данных и модулем системы позиционирования;
между системой виртуального макета и интеллектуальной системой управления осуществляется обмен данными;
модуль системы позиционирования включает метку позиционирования и базовую станцию позиционирования, где метка позиционирования расположена на внутренней поверхности выработки для сбора профиля внутренней поверхности выработки и предназначена для передачи собранной информации о положении на ближайшую базовую станцию позиционирования, алгоритм подгонки применяется для подгонки дискретизированных точечных профилей к непрерывному криволинейному профилю поверхности, то есть для получения трехмерной модели выработки; метка позиционирования дополнительно расположена на устройстве слежения для позиционирования устройства слежения и предназначена для передачи информации о положении на ближайшую базовую станцию позиционирования; метка позиционирования дополнительно расположена на монорельсовом подъемнике для определения географического положения каждого подземного монорельсового подъемника в режиме реального времени и предназначена для передачи информации о географическом положении на ближайшую базовую станцию позиционирования; базовая станция позиционирования расположена в выработке с интервалами, базовая станция позиционирования соединена с меткой позиционирования через беспроводную сеть, и базовая станция позиционирования предназначена для получения информации о положении метки позиционирования;
интеллектуальная система управления включает в себя блок передачи данных, блок обработки данных и блок управления;
каждый из шахтных светильников включает первое устройство приема беспроводного сигнала, первое устройство передачи беспроводного сигнала, первое устройство приема беспроводного сигнала LIFI и первое устройство передачи беспроводного сигнала LIFI, блок передачи данных соответственно соединен с первым устройством приема беспроводного сигнала и первым устройством передачи беспроводного сигнала, первое устройство приема беспроводного сигнала соединено проводами с первым устройством передачи беспроводного сигнала LIFI, а первое устройство передачи беспроводного сигнала соединено проводами с первым устройством приема беспроводного сигнала LIFI;
модуль автоматического управления включает второе беспроводное устройство приема сигнала LIFI, и второе беспроводное устройство приема сигнала LIFI соединено с первым беспроводным устройством передачи сигнала LIFI посредством беспроводной линии связи LIFI;
базовая станция позиционирования включает второе беспроводное устройство передачи сигнала LIFI, и второе беспроводное устройство передачи сигнала LIFI соединено с первым беспроводным устройством приема сигнала LIFI через беспроводную линию связи LIFI;
модуль датчика железнодорожного переключателя включает третье беспроводное устройство приема сигнала LIFI и третье беспроводное устройство передачи сигнала LIFI, третье беспроводное устройство приема сигнала LIFI подключено к выходному терминалу первого беспроводного устройства передачи сигнала LIFI через беспроводную линию связи LIFI, а третье беспроводное устройство передачи сигнала LIFI подключено к первому беспроводному устройству приема сигнала LIFI через беспроводную линию связи LIFI; и
модуль системы позиционирования передает информацию о положении меток позиционирования на ближайшую базовую станцию позиционирования, базовая станция позиционирования передает информацию о положении в систему передачи данных с помощью второго устройства передачи беспроводных сигналов LIFI по беспроводной линии связи LIFI, чтобы определить профиль внутренней поверхности выработки и информацию о подземном положении монорельсового подъемника и устройства слежения; модуль датчика железнодорожного переключателя передает информацию о железнодорожном переключателе в систему передачи данных третьим устройством беспроводной передачи сигналов LIFI по беспроводной линии связи LIFI, информация передается первым устройством беспроводной передачи сигналов LIFI в цифровое приемо-передающее устройство, а затем информация передается в модуль динамического виртуального макета в системе виртуального макета после обработки блоком обработки данных; система виртуального макета обновляет динамический модуль виртуального макета в реальном времени в соответствии с информацией, собранной каждым датчиком железнодорожного переключателя в модуле железнодорожных датчиков, и информацией о положении, включая монорельсовый подъемник, выработку и устройство слежения, собранной метками позиционирования, и преобразует реальную трехмерную информацию о подземной выработке и режиме работы монорельсового подъемника в цифровую трехмерную информацию в виртуальном мире, тем самым завершая процесс передачи данных.
2. Система по п. 1, отличающаяся тем, что блок передачи данных осуществляет обмен данными с модулем датчика железнодорожного переключателя через систему передачи данных, а также обмен данными с модулем системы позиционирования через систему передачи данных; система виртуального макета передает информацию на блок управления, а блок управления посылает команду на блок передачи данных.
3. Система по п. 2, отличающаяся тем, что высокоскоростная линия связи дополнительно предназначена для обмена данными между блоком передачи данных и системой передачи данных, между блоком передачи данных и блоком обработки данных, между блоком обработки данных и системой виртуального макета, между системой виртуального макета и блоком управления, а также между блоком управления и блоком передачи данных.
4. Система по п. 3, отличающаяся тем, что базовая станция позиционирования предназначена для передачи информации о положении на блок передачи данных на поверхности.
5. Система по п. 4, отличающаяся тем, что устройство слежения включает выработку, путь монорельсового подъемника, цепь и анкерный болт.
6. Система по п. 2, отличающаяся тем, что она выполнена с возможностью передачи данных с поверхности под землю, при которой: блок передачи данных передает данные на первое устройство приема беспроводного сигнала, первое устройство приема беспроводного сигнала передает данные на первое устройство передачи беспроводного сигнала LIFI, а затем первое устройство передачи беспроводного сигнала LIFI передает данные на второе устройство приема беспроводного сигнала LIFI и третье устройство приема беспроводного сигнала LIFI соответственно; и
она выполнена с возможностью передачи данных из подземного пространства на поверхность, при которой: второе беспроводное устройство передачи сигнала LIFI и третье беспроводное устройство передачи сигнала LIFI соответственно передают данные на первое беспроводное устройство приема сигнала LIFI, первое беспроводное устройство приема сигнала LIFI передает данные на первое беспроводное устройство передачи сигнала, а первое беспроводное устройство передачи сигнала передает данные на блок передачи данных.
7. Способ автоматического управления монорельсовым подъемником на основе виртуального макета, который включает следующие шаги:
этап S1, создание статической модели виртуального макета выработки;
этап S1-1, передача с помощью модуля датчика железнодорожного переключателя и модуля системы позиционирования состояния соединения и положения каждого переносного рельса каждого железнодорожного переключателя, размера поперечного сечения выработки и тенденции прохождения выработки в интеллектуальную систему управления через систему передачи данных;
S1-2, передача интеллектуальной системой управления, полученной информации в систему виртуального макета; и
S1-3, создание, в соответствии с полученной информацией, статической модели виртуального макета выработки с помощью системы виртуального макета;
этап S2, создание статической модели виртуального макета монорельсового подъемника;
S2-1, передача модулем системы позиционирования информации о географическом положении каждого монорельсового подъемника в интеллектуальную систему управления через систему передачи данных;
S2-2, передача интеллектуальной системой управления, информации в систему виртуального макета; и
S2-3, создание, согласно полученной информации, статической модели виртуального макета для каждого монорельсового подъемника отдельно с помощью системы виртуального макета;
этап S3, получение полной статической модели виртуального макета;
S3-1, импорт статической модели виртуального макета монорельсового подъемника, созданную на этапе S2, в статическую модель виртуального макета выработки, созданную на этапе S1, и ее интеграция в полную статическую модель виртуального макета;
этап S4, импорт данных;
этап S4-1, нумерация каждого монорельсового подъемника по порядку 001, 002, 003...; и
S4-2, импорт информации о номере на этапе S4-1 в модуль автоматического управления монорельсового подъемника и модель виртуального макета, соответствующую каждому монорельсовому подъемнику;
этап S5, получение динамической модели виртуального макета;
этап S5-1, фиксация модулем системы позиционирования динамического положения корпуса каждого монорельсового подъемника в реальном времени и переча динамического положения корпуса каждого монорельсового подъемника в интеллектуальную систему управления;
S5-2, передача интеллектуальной системой управления полученной динамической информации о положении всего корпуса каждого монорельсового подъемника в реальном времени в полную статическую модель виртуального макета, полученную на этапе S3, тем самым обновляя положение виртуального макета каждого монорельсового подъемника в статической модели виртуального макета выработки в реальном времени; и
S5-3, завершение процесса перехода от статических виртуальных макетов к динамическим цифровым макетам в этой точке, и получение динамической информации о положении всего корпуса монорельсового подъемника, соответствующего каждому номеру на проезжей части, тем самым получая динамическую модель виртуального макета каждого монорельсового подъемника в выработке;
при этом модуль системы позиционирования передает информацию о положении меток позиционирования на ближайшую базовую станцию позиционирования, базовая станция позиционирования передает информацию о положении в систему передачи данных с помощью второго устройства передачи беспроводных сигналов LIFI по беспроводной линии связи LIFI, чтобы определить профиль внутренней поверхности выработки и информацию о подземном положении монорельсового подъемника и устройства слежения; модуль датчика железнодорожного переключателя передает информацию о железнодорожном переключателе в систему передачи данных третьим устройством беспроводной передачи сигнала LIFI по беспроводной линии связи LIFI, и информация передается первым устройством беспроводной передачи сигнала LIFI на цифровое приемо-передающее устройство, а затем информация передается в модуль динамического виртуального макета в системе виртуального макета после оптимальной обработки блоком обработки данных; система виртуального макета обновляет динамический модуль виртуального макета в реальном времени в соответствии с информацией, собранной каждым датчиком железнодорожного переключателя в модуле железнодорожных датчиков, и информацией о положении, включая монорельсовый подъемник, выработку и устройство слежения, собранной метками позиционирования;
этап S6, выполнение беспилотного управления запуска монорельсовых подъемников;
S6-1, подключение системы виртуального макета к блоку управления интеллектуальной системы управления;
S6-2, считывание блоком управления данных для динамического виртуального макета на этапе S5 в реальном времени и анализ считанных данных;
S6-3, создание, согласно анализу на этапе S6-2, соответствующей инструкции блоком управления и передача соответствующей инструкции на блок передачи данных, и передача, блоком передачи данных, инструкции на модуль автоматического управления через систему передачи данных; и
S6-4, выполнение, посредством модуля автоматического управления, беспилотного управления запуском соответствующего монорельсового подъемника, немедленное определение, когда монорельсовому подъемнику требуется транспортировка, положения точки транспортировки и целевой точки транспортировки, интеллектуальной системой управления; интеграция, после определения положений точки транспортировки и целевой точки, интеллектуальной системы управления посредством алгоритма искусственного интеллекта, поиск, посредством интеллектуальной системы управления, монорельсового подъемника, ближайшего к точке транспортировки и находящегося в режиме ожидания в динамической модели виртуального макета посредством применения алгоритма искусственного интеллекта.
8. Способ по п. 7, отличающийся тем, что способ дополнительно включает этап S7, выполняемый перед этапом S3, причем этап S7 заключается в создании статической модели виртуального макета устройства слежения, а именно:
S7-1, позиционирование, посредством меток позиционирования в модуле системы позиционирования, географических положений выработки, пути монорельсового подъемника, цепи и анкерного болта;
S7-2, передача, через систему передачи данных, информации о географическом положении устройства слежения, полученной на этапе S7-1, в интеллектуальную систему управления;
S7-3, передача, интеллектуальной системой управления, полученной информации в систему виртуального макета; и
S7-4, создание системой виртуального макета в соответствии с полученной информацией статической модели виртуального макета устройства слежения.
| CN 110716558 A, 21.01.2020 | |||
| CN 101630159 A, 20.01.2010 | |||
| CN 111177942 A, 19.05.2020 | |||
| CN 210264824 U, 07.04.2020 | |||
| Привод подъемника | 1978 |
|
SU673601A1 |

