Область техники
Изобретение относится к ограничителю скорости согласно ограничительной части п. 1 формулы изобретения, а также к подъемно-транспортному средству с направляемой по направляющим рельсам выполненной в виде клети ходовой частью и соответствующим ограничителем скорости.
Уровень техники
Такие ограничители скорости используют, прежде всего, на тросовых подъемниках и тросовых гидроподъемниках, чтобы активировать тормозное и/или улавливающее приспособление, как только выполненная в виде клети ходовая часть начнет двигаться недопустимым образом или недопустимо быстро. При этом понятие "выполненная в виде клети ходовая часть" следует трактовать в широком смысле, и оно охватывает все типы кабин, грузовых траверс, платформ с грузозахватными устройствами и т. п.
Множество известных ограничителей скорости основано на принципе срабатывания центробежного тормоза. При этом обычно предусматривают тросовый шкив и соединенные с тросовым шкивом центробежные грузики, которые в покоящемся состоянии тросового шкива находятся в неотклоненном положении, а при возрастающей частоте вращения принудительно подаются радиально наружу за счет центробежной силы. Отдельный центробежный грузик является удерживаемым по месту с помощью пружины, причем вызываемая пружиной пружинящая сила противодействует центробежной силе. С одной стороны, пружина служит для того, чтобы при уменьшающейся частоте вращения перемещать центробежные грузики назад в неотклоненное положение. С другой стороны, пружина служит для того, чтобы уменьшать путь перемещения центробежных грузиков.
Современные ограничители скорости в большинстве случаев фиксируют по меньшей мере две скорости, которые обе приходятся на величину больше номинальной скорости, то есть обычной рабочей скорости подъемного устройства. Фиксируемыми скоростями являются скорость срабатывания электрических переключающих элементов и скорость срабатывания механических переключающих элементов, которая больше скорости срабатывания электрических переключающих элементов. Скорости срабатывания переключающих элементов замеряют соответственно по отклонению центробежных грузиков, причем отклонение зависит от усилия пружины и центробежной силы. При фиксации скорости срабатывания электрических переключающих элементов скорость движения подъемного устройства уменьшают с помощью электрических устройств, прежде всего посредством приводного электродвигателя. При фиксации скорости срабатывания механических переключающих элементов включают улавливающее приспособление подъемного устройства.
Проблематичным в случае с известными ограничителями скорости со срабатыванием центробежного тормоза является то, что центробежная сила возрастает пропорционально удалению центробежного грузика от оси вращения центробежного грузика и в квадратичной степени с увеличивающейся угловой скоростью так, что в традиционных ограничителях скорости возрастает чувствительность фиксации скорости срабатывания переключающих элементов. Из-за этого настройка приспособлений для фиксации скорости срабатывания электрических переключающих элементов и механической защиты, является очень затрудненной.
Основополагающая задача изобретения
Поэтому задачей изобретения является создание ограничителя скорости, который можно легко настраивать.
Эта задача решена с помощью ограничителя скорости с признаками по п. 1 формулы изобретения.
Соответственно, предусмотрен ограничитель скорости для подъемного устройства, прежде всего для лифта, включающий в себя тросовый шкив, приводимый тросом ограничителя скорости во вращение в обоих направлениях вокруг главной оси (H), и тормоз для затормаживания тросового шкива. Тормоз включает в себя по меньшей мере один установленный с возможностью поворота на тросовом шкиве эксцентриковый элемент, первый центробежный грузик и второй центробежный грузик. Эксцентриковый элемент установлен с возможностью поворота на первом центробежном грузике и с возможностью поворота на втором центробежном грузике, причем при обусловленном центробежной силой сдвиге первого и второго центробежных грузиков первый и второй центробежные грузики поворачивают эксцентриковый элемент. Тормоз включает в себя возвратный модуль с пружинной системой, который с помощью обеспечиваемой пружинной системой пружинящей силы оттягивает центробежные грузики в направлении их неотклоненного положения. При вращении тросового шкива в любом из двух своих направлений до (означает: предпочтительно – точно "до", в более широком смысле – в пределах до + 25%, а лучше, только + 10%, в идеальном случае только + 7,5% в сторону уменьшения или увеличения) частоты вращения тросового шкива, соответствующей скорости срабатывания электрических переключающих элементов, пружинная система имеет первый коэффициент упругости, а с момента частоты вращения тросового шкива, соответствующей скорости срабатывания электрических переключающих элементов, пружинная система имеет второй коэффициент упругости, превышающий первый коэффициент упругости. Прежде всего, второй коэффициент упругости больше первого коэффициента упругости на коэффициент, равный примерно 1,05, предпочтительно на коэффициент, равный примерно 1,5, наиболее предпочтительно на коэффициент, равный примерно 2. В идеальном случае вторая пружина может быть предварительно напряжена, чтобы задавать мгновенный подъем хода характеристической кривой с последующим плоским ходом характеристической кривой, как только пружина будет приведена в действие.
Подобным образом выходят на нелинейную и/или прерывистую, прежде всего линейную на отдельных участках, характеристическую кривую упругости, причем пружинящая сила при большем отклонении (грузиков), прежде всего, начиная от скорости срабатывания электрических переключающих элементов вследствие нелинейности и/или прерывистости (характеристической кривой) увеличивается сильнее по сравнению с характеристической кривой упругости, в случае с которой коэффициент упругости является постоянным по всему ходу отклонения. В результате при высоких скоростях с большими центробежными силами возникают также большие пружинящие силы. Кроме того, благодаря независимому выбору обоих коэффициентов упругости можно проще настраивать оба момента срабатывания ограничителя скорости независимо друг от друга. Прежде всего, возможна очень простая настройка приспособлений для фиксации скорости срабатывания электрических и механических переключающих элементов.
Предпочтительно, первый коэффициент упругости является постоянным. Предпочтительно, второй коэффициент упругости является постоянным. Благодаря этому можно использовать выгодные по цене стандартизованные пружины. К тому же в случае с постоянными коэффициентами упругости возможна очень простая настройка приспособлений для фиксации скорость срабатывания электрических и механических переключающих элементов.
Другие возможности осуществления изобретения
Предпочтительно, пружинная система включает в себя первую пружину с первым коэффициентом упругости и вторую пружину, причем второй коэффициент упругости получается из комбинации, прежде всего из сложения, коэффициентов упругости первой и второй пружин. Предпочтительно, до достижения скорости срабатывания электрических переключающих элементов вторая пружина не осуществляет приложение какой-либо силы к центробежным грузикам. Благодаря двум независимым пружинам можно особо хорошо и просто настраивать моменты срабатывания (ограничителя скорости) по скорость срабатывания электрических и механических переключающих элементов.
Альтернативно, также может быть использована пружинная система, которая состоит из одной отдельной пружины, причем отдельной пружине на отдельных участках приданы первый и второй коэффициенты упругости. Предпочтительно, такая отдельная пружина представляет собой винтовую пружину, прежде всего пружину растяжения или пружину сжатия. Такая отдельная пружина может быть конической спиральной пружиной, то есть, прежде всего, конической. Альтернативно, такая отдельная пружина конструктивно может быть выполнена так, что отдельные участки пружины в зависимости от силового воздействия сводятся в блок. Благодаря использованию только одной отдельной пружины конструкция упрощается и, при данных условиях, является особо компактной.
Предпочтительно, первая пружина выполнена как пружина сжатия и одним концом пружины опирается на первый центробежный грузик, причем пружина другим концом пружины опирается на пружинную опору, и причем пружинная опора функционально соединена со вторым центробежным грузиком. В результате оба центробежных грузика являются сопряженными друг с другом через пружину.
Предпочтительно, вторая пружина выполнена в виде пружины растяжения, причем вторая пружина одним ее концом пружины прикреплена, прежде всего подвешена, к первому центробежному грузику, и причем вторая пружина другим ее концом пружины прикреплена, прежде всего подвешена, ко второму центробежному грузику.
Предпочтительно, вторая пружина выполнена как витая изгибная пружина, также называемая пружиной кручения, причем одно плечо опирается на эксцентриковый элемент, и причем, самое позднее, с частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов, другое плечо опирается на один из двух центробежных грузиков. В другом конструктивном выполнении одно плечо может опираться на один из двух центробежных грузиков, причем, самое позднее, с частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов, другое плечо опирается на эксцентриковый элемент.
Предпочтительно, на одном из центробежных грузиков прикреплен упорный палец, в идеальном случае – выполнено продольное отверстие, и упорный палец или продольное отверстие служат в качестве упора для второй пружины. Предпочтительно, предусмотрен определенный путь перемещения до соприкосновения второй пружины, прежде всего плеча второй пружины, с упором. Прежде всего, вторая пружина, прежде всего плечо второй пружины, соприкасается с упором, начиная только со скорости срабатывания электрических переключающих элементов. Благодаря этому увеличивается замыкающее усилие, которое противодействует центробежной силе.
Предпочтительно, упорный палец выполнен как эксцентриковый палец. Благодаря этому посредством проворачивания эксцентрикового пальца можно просто и точно настраивать момент активизации витой изгибной пружины.
Предпочтительно, вторая пружина является предварительно напряженной. Благодаря этому при активизации второй пружины может быть получен квази скачкообразный подъем хода характеристической кривой упругости, в результате чего дополнительно оптимизируется сокращение пути перемещения центробежных грузиков. Кроме того, вторая пружина может быть выполнена из расчета развития сравнительно плоского хода характеристической кривой упругости, то есть со сравнительно малым коэффициентом упругости, прежде всего с коэффициентом упругости, который меньше коэффициента упругости первой пружины, но, тем не менее, продуцирует прежде всего необходимое усилие. Благодаря этому после скачкообразного подъема хода характеристической кривой упругости, вызванного предварительным напряжением второй пружины, снова устанавливается плоский ход характеристической кривой упругости. Благодаря этому диапазон без особой чувствительности может быть настроен простым способом.
Предпочтительно, вторая пружина закреплена на прикрепленном с возможностью перестановки к эксцентриковому элементу держателе пружины, причем посредством перестановки держателя пружины настраиваемым является, прежде всего, предварительное напряжение второй пружины. Посредством перестановки крепления можно изменять предварительное напряжение пружины и настраивать систему простым способом.
Предпочтительно, один конец второй пружины является перемещаемым в продольном отверстии до частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов причем продольное отверстие расположено, прежде всего, в одном из двух центробежных грузиков. При этом никакое усилие со стороны пружины не передается. Когда центробежные грузики вследствие центробежных сил окажутся перемещенными достаточно далеко, пружина прилегает, прежде всего, к концу продольного отверстия (упирается в конец продольного отверстия), и пружина передает усилия. Благодаря этому простым способом может быть обеспечено, что вторая пружина до скорости срабатывания электрических переключающих элементов не передает никакие усилия.
Предпочтительно, тормоз включает в себя два установленных с возможностью поворота на тросовом шкиве эксцентриковых элемента, причем каждый из эксцентриковых элементов установлен с возможностью поворота на первом центробежном грузике и с возможностью поворота на втором центробежном грузике, причем при обусловленном центробежной силой сдвиге первого и второго центробежных грузиков первый и второй центробежные грузики поворачивают эксцентриковые элементы, причем первая пружина состоит из двух первых, прежде всего конструктивно идентичных, отдельных пружин, причем каждая из первых отдельных пружин одним ее концом пружины опирается на один из двух центробежных грузиков, и причем каждая из первых отдельных пружин другим ее концом пружины опирается на пружинную опору, причем обе первые отдельные пружины функционально соединены друг с другом через пружинную опору, и причем вторая пружина состоит из соответственно двух вторых, прежде всего конструктивно идентичных, отдельных пружин, причем, прежде всего, по меньшей мере, с частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов, каждая из вторых отдельных пружин одним ее концом пружины опирается на один из двух центробежных грузиков, а другим ее концом пружины опирается на соответственно один эксцентриковый элемент.
Предпочтительно, первая пружина является предварительно напряженной. Предпочтительно, первая пружина предварительно напряжена настолько сильно, что до величины примерно больше, прежде всего примерно на 10% больше, предпочтительно примерно на 5% больше, наиболее предпочтительно примерно на 2-3% больше, номинальной скорости, то есть обычной рабочей скорости подъемного устройства, не осуществляется никакое перемещение центробежных грузиков из неотклоненного положения вследствие центробежной силы. Благодаря этому конструкция может быть выполнена наиболее компактной. Кроме того, можно наиболее просто настраивать приспособления для фиксации скорости срабатывания электрических переключающих элементов.
Предпочтительно, предусмотрено подъемно-транспортное средство с направляемой по направляющим рельсам выполненной в виде клети ходовой частью, приводной системой и взаимодействующим с направляющими рельсами тормозным приспособлением для прекращения недопустимого режима перемещения выполненной в виде клети ходовой части, а также с ограничителем скорости по одному из п.п. 1-14 для срабатывания тормозного и улавливающего приспособления.
Другие преимущества, принципы действия и возможности осуществления изобретения следуют из описанных далее по тексту примеров конструктивного выполнения со ссылкой на фигуры.
Перечень фигур
На фигурах показаны:
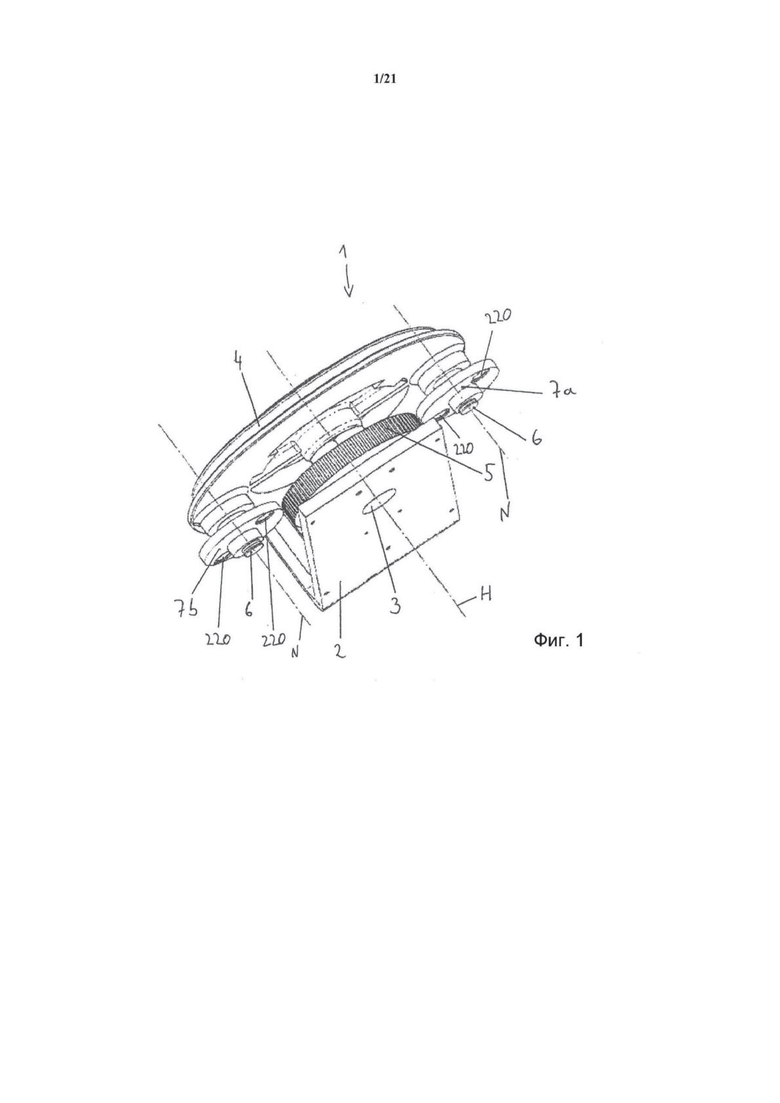
Фиг. 1: схематичный вид частично собранного ограничителя скорости в качестве обзорного представления,
Фиг. 2: частично собранный ограничитель скорости с тросовым шкивом в виде спереди в первом примере конструктивного выполнения с центробежными грузиками в неотклоненном положении,
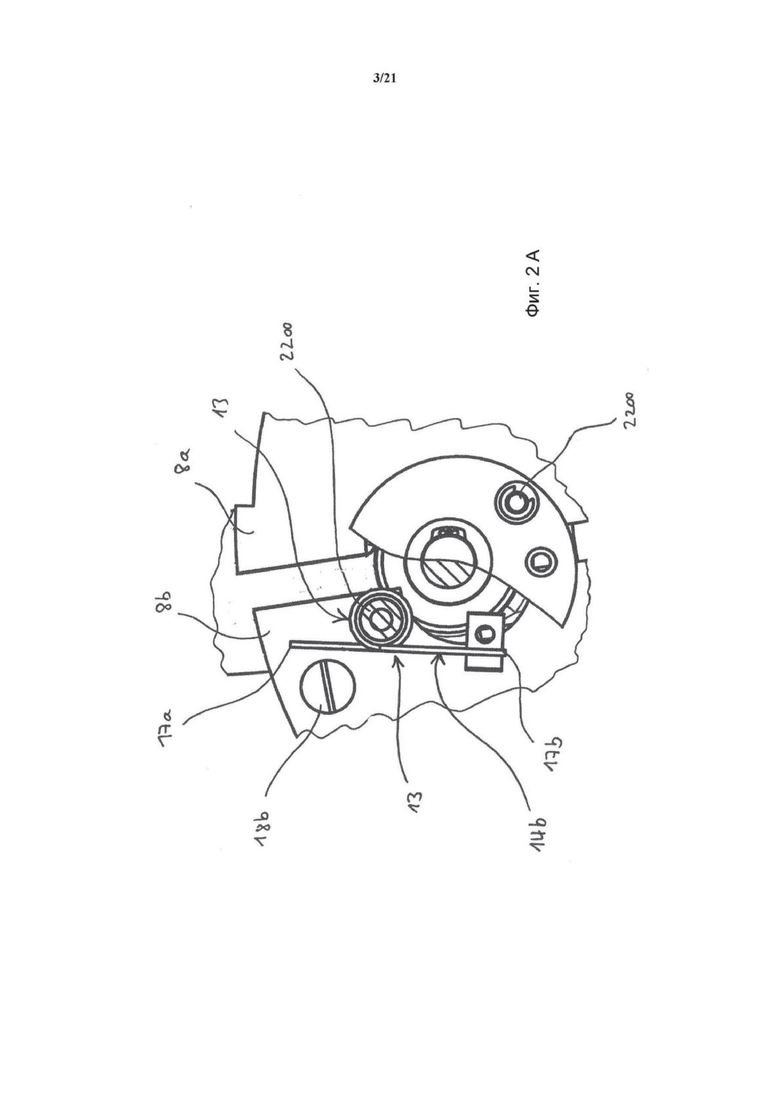
Фиг. 2А: увеличенная выкопировка с фиг. 2,
Фиг. 3: частично собранный ограничитель скорости в виде спереди в первом примере конструктивного выполнения, причем тросовый шкив вращается со скоростью срабатывания электрических переключающих элементов,
Фиг. 4: покомпонентное изображение частично собранного ограничителя скорости в первом примере конструктивного выполнения,
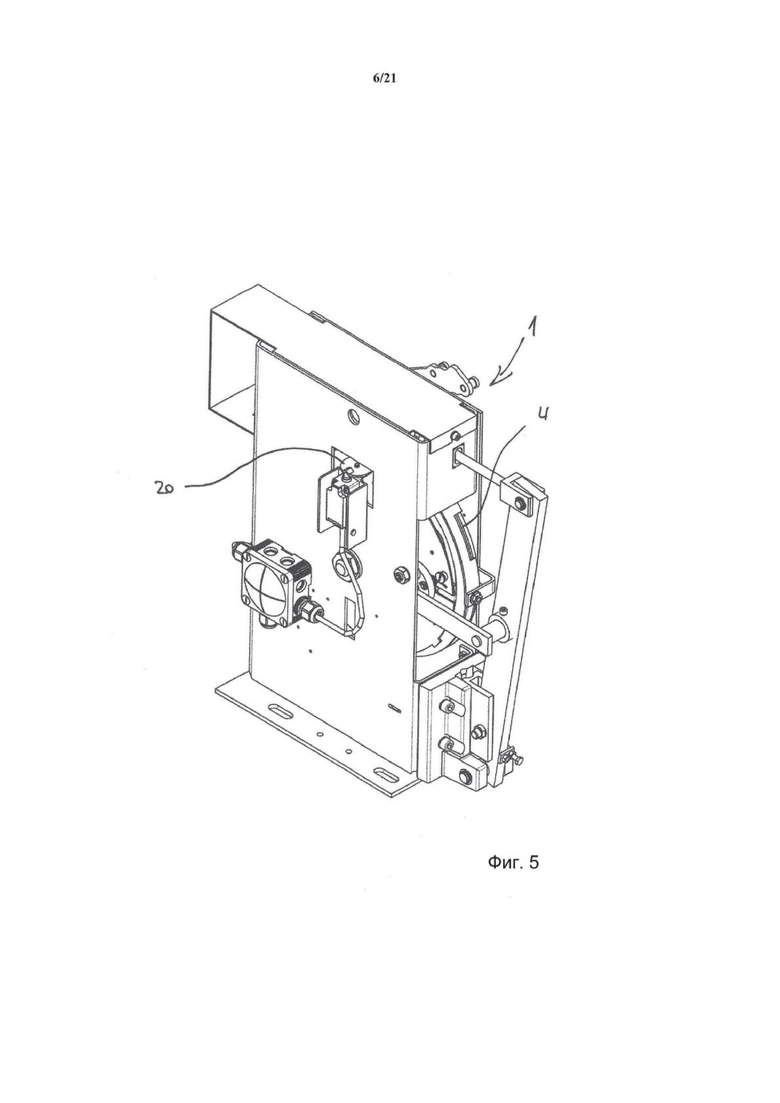
Фиг. 5: схематичный вид собранного ограничителя скорости,
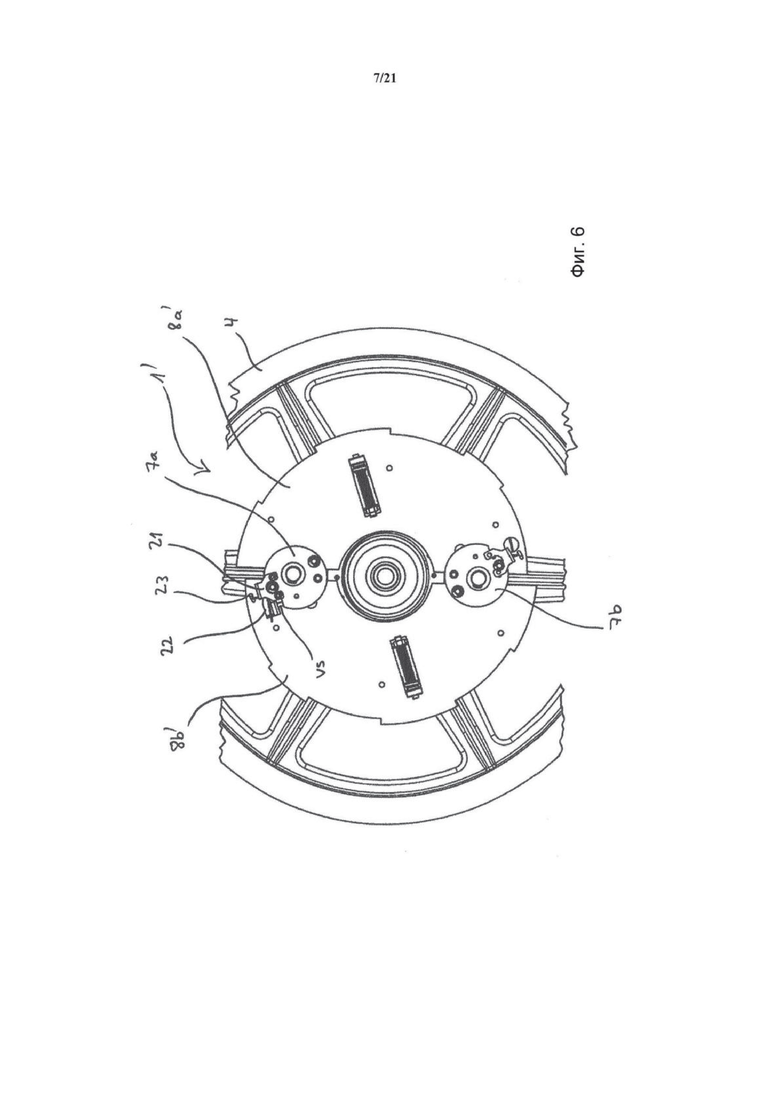
Фиг. 6: частично собранный ограничитель скорости с тросовым шкивом в виде спереди во втором примере конструктивного выполнения с центробежными грузиками в неотклоненном положении,
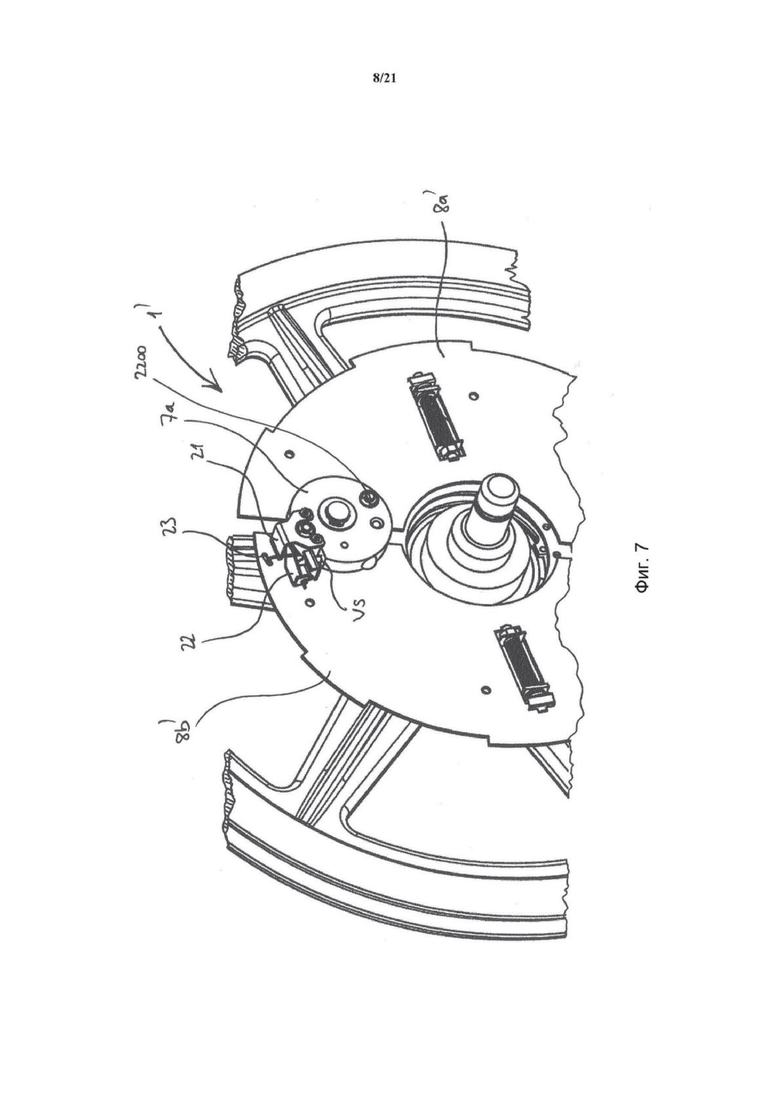
Фиг. 7: частично собранный ограничитель скорости с тросовым шкивом в виде в аксонометрии во втором примере конструктивного выполнения с центробежными грузиками в неотклоненном положении,
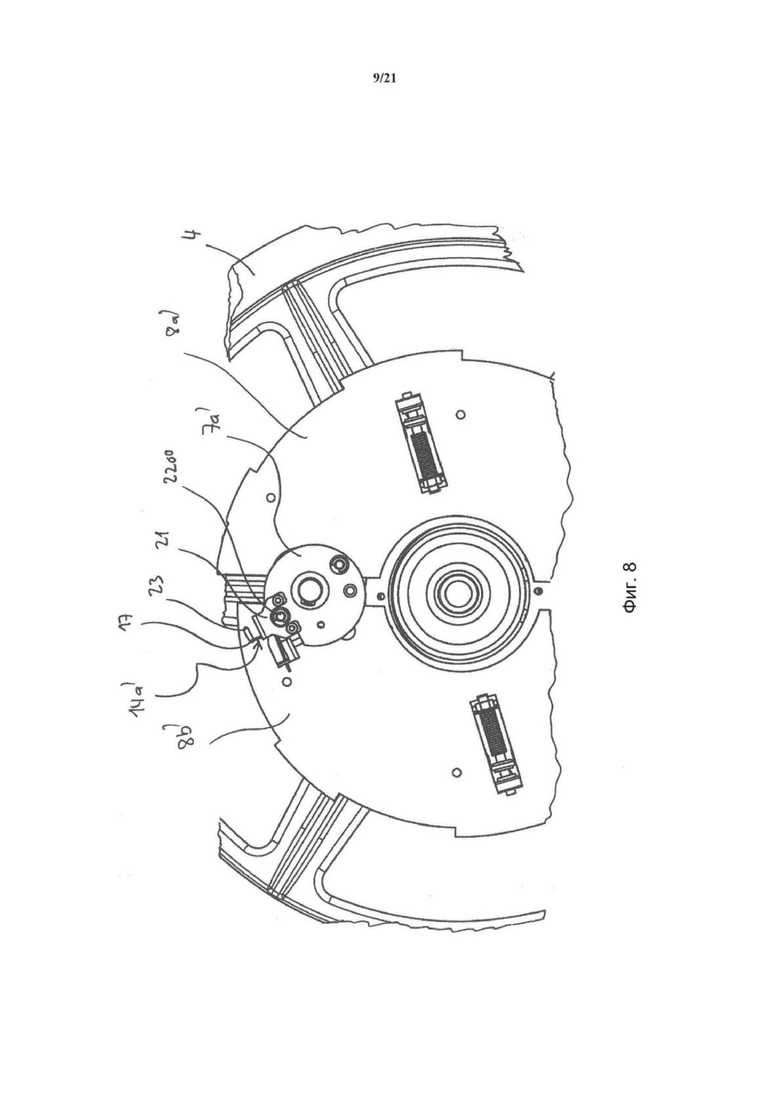
Фиг. 8: частично собранный ограничитель скорости в виде спереди во втором примере конструктивного выполнения, причем тросовый шкив вращается со скоростью срабатывания электрических переключающих элементов,
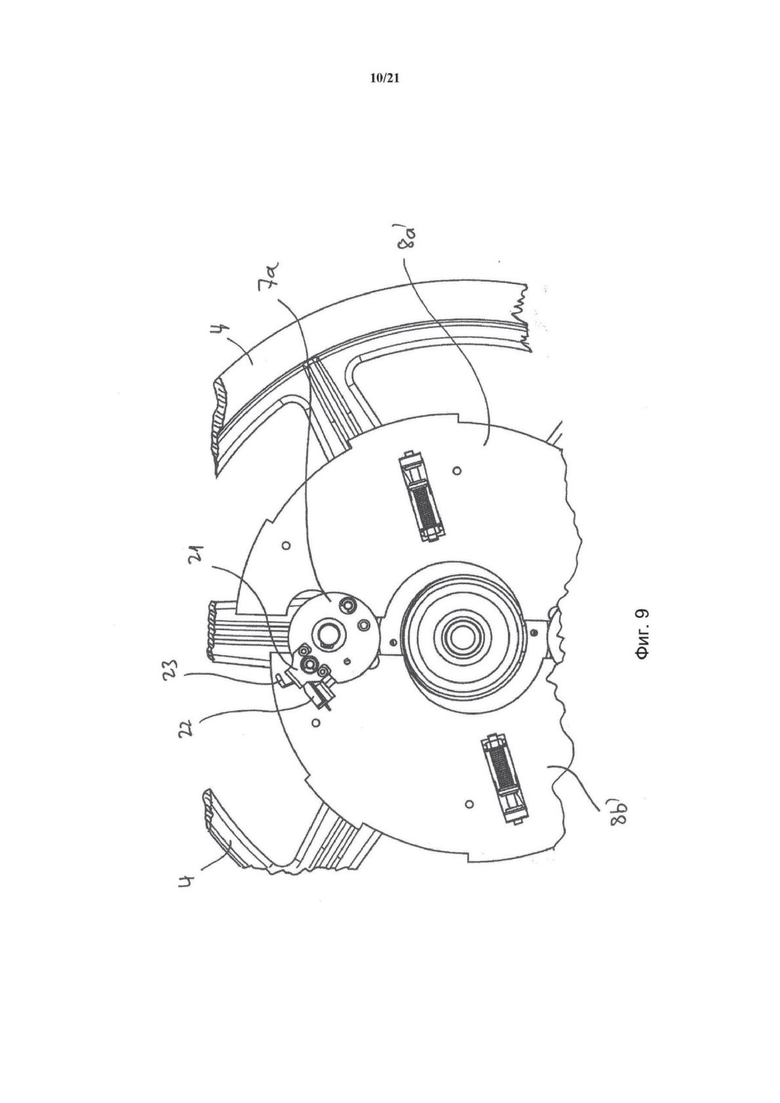
Фиг. 9: частично собранный ограничитель скорости в виде спереди во втором примере конструктивного выполнения, причем тросовый шкив вращается со скоростью срабатывания механических переключающих элементов
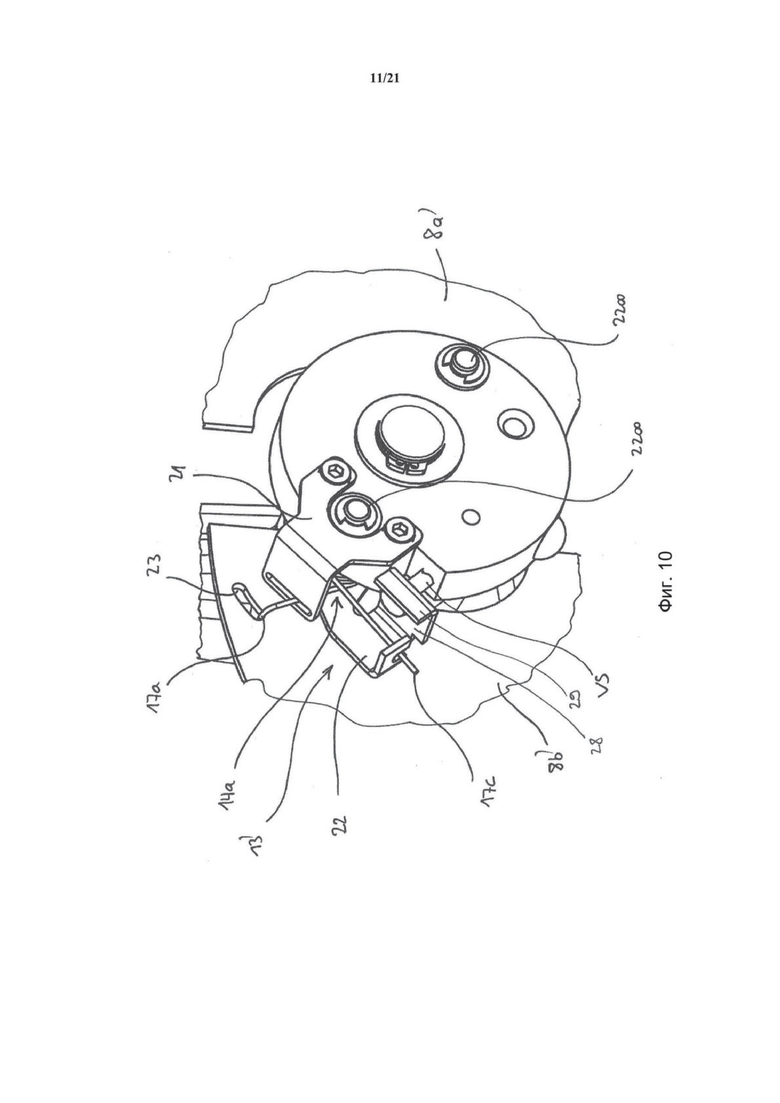
Фиг. 10: деталировка фрагмента в области эксцентрикового элемента, причем тросовый шкив вращается со скоростью срабатывания механических переключающих элементов,
Фиг. 11: деталировка фрагмента в области эксцентрикового элемента, причем тросовый шкив не вращается,
Фиг. 12: перспективное объемное изображение с пространственным разделением деталей на участке эксцентрикового элемента,
Фиг. 13: частично собранный ограничитель скорости с тросовым шкивом в виде спереди в третьем примере конструктивного выполнения, причем тросовый шкив вращается со скоростью срабатывания электрических переключающих элементов,
Фиг. 14: частично собранный ограничитель скорости в виде в аксонометрии в третьем примере конструктивного выполнения, причем тросовый шкив вращается со скоростью срабатывания электрических переключающих элементов,
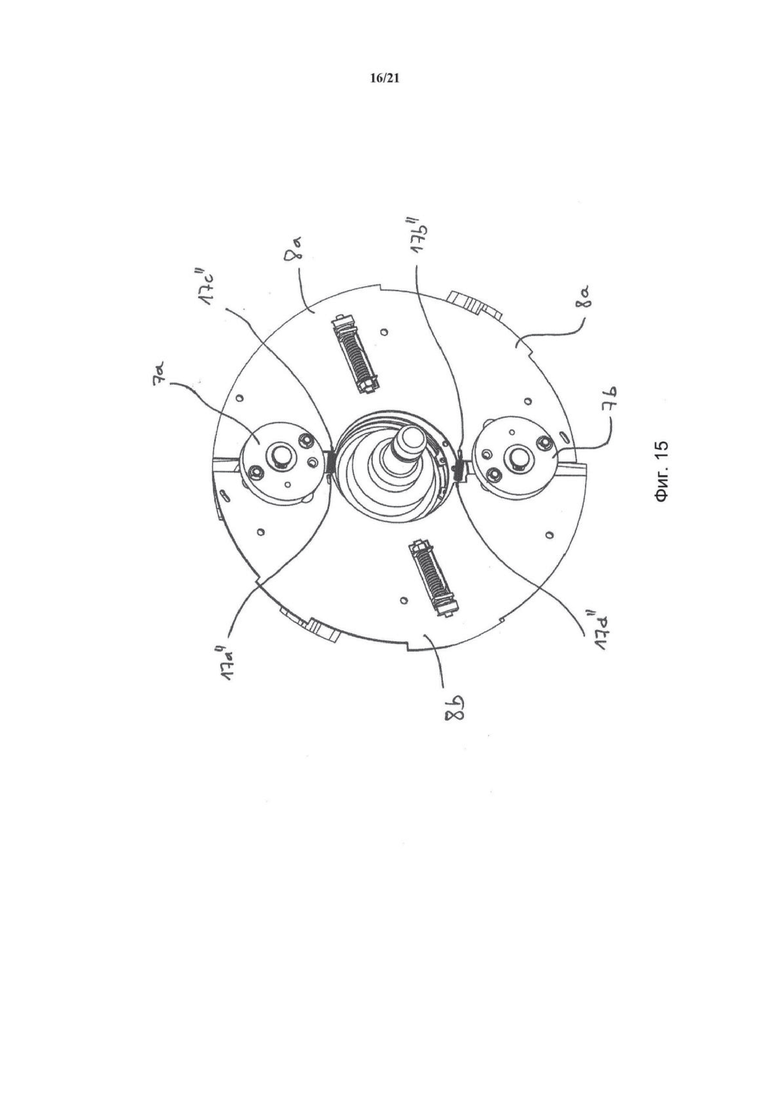
Фиг. 15: деталировка фрагмента в области центробежных грузиков, причем тросовый шкив вращается со скоростью срабатывания электрических переключающих элементов,
Фиг. 16: деталировка фрагмента в области эксцентрикового элемента, причем тросовый шкив вращается со скоростью срабатывания электрических переключающих элементов,
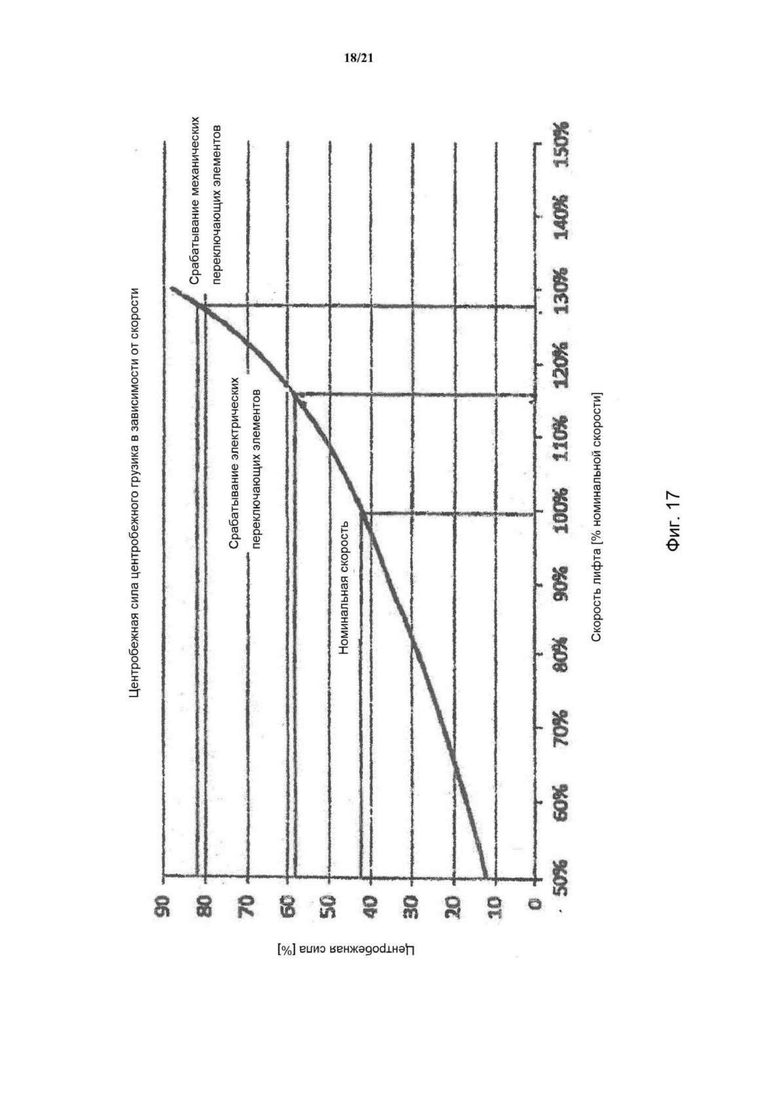
Фиг. 17: схематическая диаграмма для иллюстрации центробежной силы на центробежном грузике в зависимости от скорости лифта,
Фиг. 18: схематическая диаграмма для иллюстрации хода характеристической кривой упругости для случая с одним коэффициентом упругости и предварительно напряженной первой пружиной,
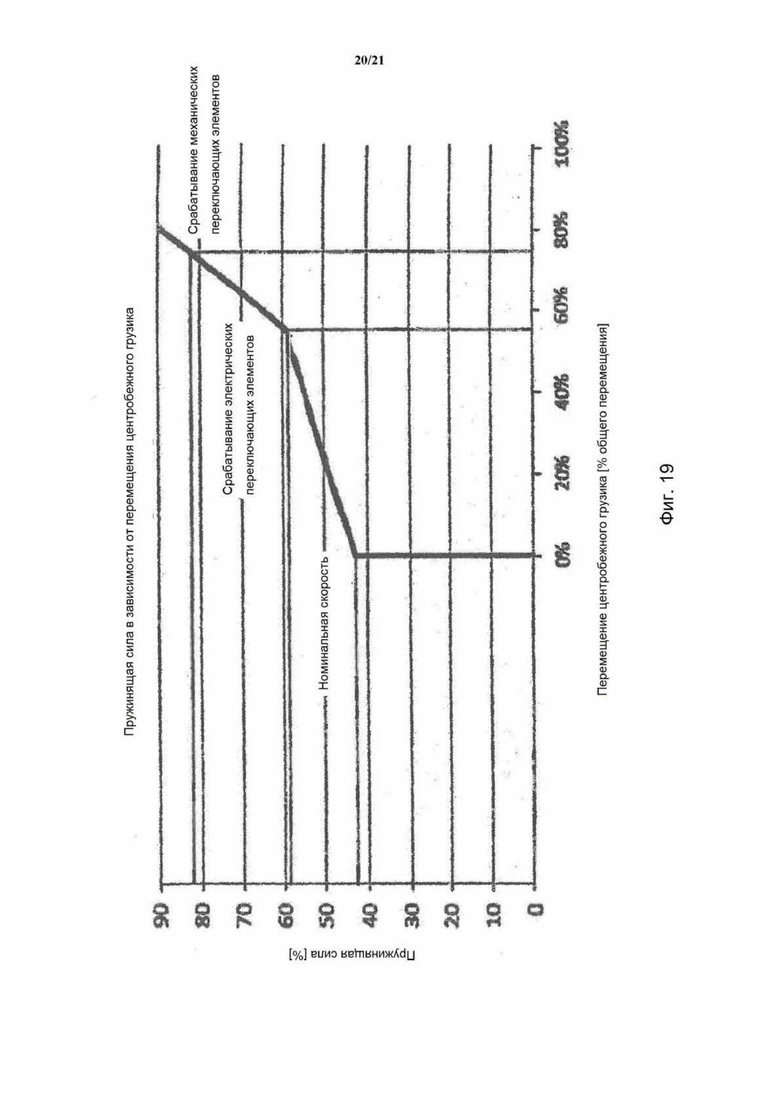
Фиг. 19: схематическая диаграмма для иллюстрации хода характеристической кривой упругости для случая с различными коэффициентами упругости на отдельных участках и предварительно напряженной первой пружиной,
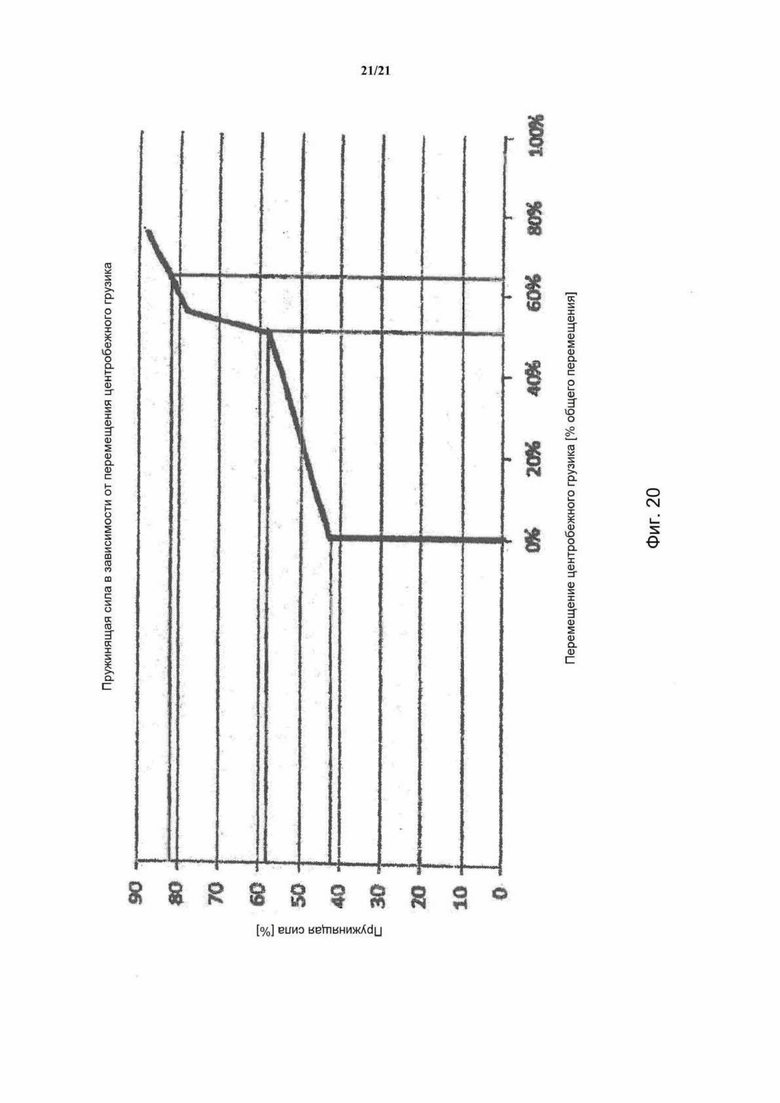
Фиг. 20: схематическая диаграмма для иллюстрации хода характеристической кривой упругости для случая с различными коэффициентами упругости на отдельных участках и предварительно напряженными первой и второй пружинами.
Примеры предпочтительного конструктивного выполнения
Первый пример конструктивного выполнения
На фиг. 1 представлена одна часть ограничителя 1 скорости. Ограничитель 1 скорости, предпочтительно, концептуально рассчитан для не показанных на фигурах вертикальных подъемников/лифтов для транспортировки людей и/или грузов, но при необходимости может использоваться и в отношении других аналогичных подъемных устройств или подъемно-транспортных установок, перемещение которых требует постоянного контроля для фиксации недопустимых режимов движения.
В идеальном случае ограничитель 1 скорости, пусть даже и не обязательно, по своей базовой концепции выполнен как уже известный ограничитель скорости согласно ранее выложенной патентной заявке DE 102007052280 той же самой фирмы-заявителя. На указанную патентную заявку делается ссылка в полном объеме раскрытия сущности предмета изобретения в приведенном в ней описании, так что необходимость в повторном изложении базовой функции и принципиальной конструкции ограничителя скорости, описанного здесь в качестве предпочтительного примера конструктивного выполнения, отпадает. Сохраняется преимущественное право на заимствование отличительных признаков из уже существующего текста заявки.
Ограничитель 1 скорости включает в себя несущую конструкцию 2, которая в данном случае выполнена из L-образной стальной плиты. На этой стальной плите закреплена выступающая с одной стороны цапфа 3 оси.
Цапфа 3 оси задает главную ось H ограничителя 1 скорости. На этой цапфе 3 оси с возможностью проворачивания расположен тросовый шкив 4 для не показанного на фигурах троса ограничителя скорости.
Наряду с тросовым шкивом 4, на цапфе 3 оси установлен тормозной ротор 5. Хотя этот тормозной ротор 5 и имеет здесь дискообразную форму, однако в данном случае, тем не менее, он действует по типу барабанного тормоза, поскольку его окружная поверхность представляет собой трущуюся поверхность.
На одном своем торце тросовый шкив 4 снабжен установочными пальцами 6. Эти установочные пальцы 6 соответственно задают вспомогательную ось N, обычно расположенную параллельно главной оси H. На них с возможностью проворачивания соответственно установлен эксцентриковый элемент 7a или 7b. В качестве эксцентрикового элемента 7a, 7b можно рассматривать также эксцентриковый диск, промежуточный элемент и т. п. Каждый из этих эксцентриковых элементов 7a, 7b, при необходимости – соответственно укомплектованный, что здесь не показано, функционально задает тормозной башмак. Когда соответствующий эксцентриковый элемент 7a, 7b проворачивается достаточно широко, происходит тормозящее прилегание к тормозному ротору 5. (Здесь на фигуре не показанная) конфигурация преимущественно такова, что тормозное действие само по себе усиливается, как только в результате достаточно широкого проворачивания эксцентрикового элемента 7a, 7b произойдет первый скользящий контакт с тормозным ротором. Для достижения компенсации поперечных сил предпочтительно предусмотрены по меньшей мере два по возможности диаметрально противолежащих эксцентриковых элемента 7a, 7b. Представляются возможными модифицированные варианты конструктивного выполнения с тремя, четырьмя или бóльшим количеством эксцентриковых элементов 7a, 7b, но здесь они не показаны.
В свою очередь, каждый из эксцентриковых элементов 7a, 7b снабжен двумя сопрягающими пальцами 2200, см. фиг. 4. Под сопрягающие пальцы 2200 в эксцентриковых элементах 7a, 7b предусмотрены расточенные отверстия 220, см. фиг. 1. Через один из своих сопрягающих пальцев 2200 соответствующий эксцентриковый элемент 7a, 7b соединен с показанным на фиг. 2 первым центробежным грузиком 8a. Через другой из своих сопрягающих пальцев 2200 соответствующий эксцентриковый элемент 7a, 7b соединен со вторым центробежным грузиком 8b. Это можно хорошо распознать на основе фиг. 2.
С патентно-правовой точки зрения следует уточнить, что термины "первый эксцентриковый элемент" и "второй эксцентриковый элемент", а также "первый центробежный грузик" и "второй центробежный грузик" и т. д., прежде всего, не выражают никакое ограничение по количеству. При этом использование всего лишь двух эксцентриковых элементов, двух центробежных грузиков и т. д. является предпочтительным вариантом конструктивного выполнения, поскольку это количество обеспечивает малый расход конструктивных элементов. В некоторых случаях предпочтительным может быть решение, если предусмотреть только один центробежный грузик 8a, 8b и/или только один эксцентриковый элемент 7a, 7b. В некоторых случаях предпочтительным может быть решение, если предусмотреть более чем два центробежных грузика 8a, 8b и/или более чем два эксцентриковых элемента 7a, 7b.
Оба центробежных грузика 8a и 8b выполнены в этом примере конструктивного выполнения как полудиски. В определенных случаях собственной массы этих изготовленных предпочтительно из листового металла полудисков бывает достаточно, чтобы развить достаточные центробежные силы на тех частотах вращения, при которых должно осуществляться срабатывание (ограничителя скорости) согласно назначению. В других случаях эти полудиски могут быть снабжены дополнительными грузиками.
Ни один из обоих центробежных грузиков 8a, 8b, собственно, не размещен непосредственно напротив главной оси H или на цапфе 3 оси. Вместо этого центробежные грузики исключительно с помощью эксцентриковых дисков 7a и 7b, с которыми они сопряжены через сопрягающие пальцы 2200, и с помощью более подробно описываемого сразу же далее по тексту возвратного модуля 10 являются удерживаемыми по месту таким образом, что центробежные грузики 8a и 8b при достаточно большой частоте вращения могут перемещаться в радиальном направлении наружу.
При рассмотрении фиг. 2 можно легко понять, что центробежные грузики 8a, 8b перемещаются в противоположных направлениях радиально наружу (в направлении стрелок VR), как только соответствующая, воздействующая на них центробежная сила оказывается достаточно большой, чтобы преодолеть более подробно поясняемую далее по тексту пружинящую силу, которая удерживает центробежные грузики 8a, 8b в их неотклоненном положении 9.
В результате этого на эксцентриковых дисках 7a и 7b возникает крутящий момент, который таким образом проворачивает эксцентриковые диски или соответственно наложенную на них, здесь на фигуре повторно не показанную тормозную накладку, что происходит прилегание к показанному на фиг. 1 тормозному ротору 5, после чего, как правило, наступает блокировка вследствие уже рассмотренного эффекта усиливающегося самоторможения. Вследствие этого тросовый шкив 4 затормаживается. Возникает тяга, действующая на трос ограничителя скорости. В этом случае он может вызвать срабатывание закрепленного на нем тормозного и/или улавливающего приспособления.
При этом важно, чтобы было понятно, что показанные на фиг. 2 центробежные грузики 8a или 8b не только перемещаются исключительно в радиальном направлении наружу, но и подвергаются также определенному поперечному перемещению, поскольку в результате проворачивания эксцентриковых дисков 7a, 7b положение удерживающих центробежные грузики сопрягающих пальцев 2200 изменяется по отношению к главной оси H. Поэтому, каждый из обоих центробежных грузиков 8a или 8b перемещается по ходу своего перемещения в радиальном направлении наружу также немного дальше и в поперечном направлении. Это также является причиной того, почему оба центробежных грузика 8a, 8b не размещены собственно непосредственно напротив главной оси H.
Особый интерес для изобретения представляет возвратный модуль 10. Возвратный модуль 10 лучше всего можно описать на основе фиг. 2, 3 и 4.
Возвратный модуль 10 включает в себя пружинную систему, которая с помощью обеспечиваемой пружинной системой пружинящей силы оттягивает центробежные грузики 8a, 8b в направлении их неотклоненного положения 9.
Пружинная система включает в себя одну первую пружину. В примере конструктивного выполнения согласно фиг. 2 первая пружина состоит, предпочтительно, из двух (или нескольких) первых отдельных пружин 12a, 12b. Обе первые отдельные пружины 12a, 12b выполнены конструктивно идентичными. В этом примере конструктивного выполнения обе первые отдельные пружины 12a, 12b выполнены как винтовые пружины.
Первая из двух первых отдельных пружин – пружина 12a опирается на одном своем конце 15a пружины на первый центробежный грузик 8a. На своем другом конце 15c пружины первая из двух первых отдельных пружин – пружина 12a опирается на показанную на фиг. 4 пружинную опору 16. Вторая из двух первых отдельных пружин – пружина 12b, опирается на одном своем конце 15b пружины на второй центробежный грузик 8b. На своем другом конце 15d пружины вторая из двух первых отдельных пружин – пружина 12b опирается на пружинную опору 16. За счет этого обе первые отдельные пружины 12a, 12b через пружинную опору 16 функционально соединены друг с другом.
Пружинная система включает в себя показанную на фиг. 2 вторую пружину. В примере конструктивного выполнения согласно фиг. 2 вторая пружина состоит из двух вторых отдельных пружин 14a, 14b. Обе вторые отдельные пружины 14a, 14b выполнены конструктивно идентичными. В этом примере конструктивного выполнения обе вторые отдельные пружины 14a, 14b выполнены как витые изгибные пружины, также называемые пружинами кручения.
На каждом из обоих центробежных грузиков 8a, 8b закреплен упорный палец в форме эксцентрикового пальца 18a, 18b. Упорные пальцы в форме эксцентриковых пальцев 18a, 18b служат в качестве упора для второй пружины в форме из двух вторых отдельных пружин 14а, 14b. Первая из обеих вторых отдельных пружин – пружина 14a на одном своем конце 17a пружины или на одном из ее плеч может опираться на второй эксцентриковый палец 18b. На своем другом конце 17c пружины или на своем другом плече первая из обеих вторых отдельных пружин – пружина 14a опирается на первый эксцентриковый элемент 7a. Вторая из обеих вторых отдельных пружин – пружина 14b на одном своем конце 17b пружины или на одном ее плече может опираться на первый эксцентриковый палец 18а. На своем другом конце 17d пружины или на своем другом плече вторая из обеих вторых отдельных пружин – пружина 14b опирается на второй эксцентриковый элемент 7b.
В показанном на фиг. 2 неотклоненном положении 9 центробежных грузиков 8a, 8b концы 17a, 17c пружины вторых отдельных пружин 14a, 14b не опираются на эксцентриковые пальцы 18a, 18b, то есть еще не активируются на пружинящее действие.
Когда тросовый шкив 4 и, следовательно, оба центробежных грузика 8a, 8b начинают вращаться со скоростью, меньшей чем первая скорость срабатывания электрических переключающих элементов исходящая вследствие вращения и под действием массы центробежных грузиков 8a, 8b центробежная сила давит на первую пружину в форме из двух первых отдельных пружин 12a, 12b, причем центробежная сила в состоянии уравновешивания сил компенсируется пружинящей силой первой пружины, которая создается с помощью первых отдельных пружин 12a, 12b и пружинной опоры 16. Предпочтительно, до первой скорости срабатывания электрических переключающих элементов или сверх нее пружинная система имеет первый коэффициент D1 упругости, причем коэффициент D1 упругости в этом примере конструктивного выполнения является составляемым из сложения двух коэффициентов упругости двух первых отдельных пружин 12a, 12b.
Когда частота вращения тросового шкива 4 повышается до первой скорости срабатывания электрических переключающих элементов или повышается сверх нее, эксцентриковые элементы 7a, 7b, включая закрепленные на эксцентриковых элементах 7a, 7b вторые отдельные пружины 14a, 14b, поворачиваются до тех пор, пока концы 17a, 17b обеих вторых отдельных пружин 14a, 14b не прилягут к эксцентриковым пальцам 18a, 18b. При скорости, большей чем или равной первой скорости срабатывания электрических переключающих элементов исходящая вследствие вращения и под действием массы центробежных грузиков 8a, 8b центробежная сила давит на первую пружину в форме из двух первых отдельных пружин 12a, 12b, причем центробежная сила генерируется с действием через пружинящую силу первой пружины, через первые отдельные пружины 12a, 12b и через пружинную опору 16, и давит на вторую пружину в форме из двух вторых отдельных пружин 14a, 14b, в результате чего она компенсируется в состоянии уравновешивания сил. Поэтому, начиная с или сверх первой скорости срабатывания электрических переключающих элементов, пружинная система имеет второй коэффициент D2 упругости, причем коэффициент D2 упругости в этом примере конструктивного выполнения является составляемым из сложения двух коэффициентов упругости двух первых отдельных пружин 12a, 12b и двух вторых отдельных пружин 14a, 14b.
В этом примере конструктивного выполнения все коэффициенты упругости отдельных пружин 12a, 12b, 14a, 14b, а, следовательно, также и первый коэффициент упругости первой пружины и второй коэффициент упругости второй пружины являются постоянными.
На фиг. 4 можно хорошо распознать, что эксцентриковый палец 18a по типу винтового соединения с использованием стопорной или контрящей гайки 19 закреплен на втором центробежном грузике 8b. Аналогично, другой эксцентриковый палец 18b по типу винтового соединения с использованием не показанной такой гайки закреплен на первом центробежном грузике 8a. Эксцентриковый палец 18a, 18b имеет на головке шлиц (простой, крестообразный или в форме звездочки). Он предусмотрен для вставки отвертки. Головка эксцентрикового пальца 18a, 18b поворачивается эксцентрично. В результате простым способом может задаваться относительное расстояние эксцентриковых пальцев до конца соответствующей второй отдельной пружины 14a, 14b. За счет этого выполняют настройку, с какой частоты вращения вторые пружины в форме вторых отдельных пружин 14a, 14b будут прилегать к эксцентриковым пальцам 18a, 18b и, таким образом, увеличивают коэффициент упругости в системе в целом.
На фиг. 5 в собранном виде показан комплектный ограничитель 1 скорости. На ограничителе 1 скорости смонтировано средство коммутации 20 в форме переключателя. Переключатель включается тогда, когда тросовый шкив 4 превышает заданную скорость, прежде всего скорость срабатывания электрических переключающих элементов. После этого посылается электрический сигнал на не показанный на фигурах электронный блок управления для управления подъемным устройством, в результате чего происходит, например, дросселирование электрического двигателя таким образом, что скорость подъемного устройства уменьшается.
Если скорость подъемного устройства и дальше увеличивается вплоть до скорости срабатывания механических переключающих элементов то тросовый шкив 4 тормозится тормозом, а оборачивающийся вокруг тросового шкива и соединенный с кабиной трос вызывает механическое торможение.
Второй пример конструктивного выполнения
На фиг. 6-12 показан ограничитель 1' скорости во втором примере конструктивного выполнения.
Ограничитель 1' скорости во втором примере конструктивного выполнения соответствует, по существу, ограничителю 1 скорости в первом примере конструктивного выполнения, так что вышесказанное в отношении ограничителя 1 скорости в соответствии с первым примером конструктивного выполнения действительно также и в отношении ограничителя 1' скорости в соответствии со вторым примером конструктивного выполнения, за исключением изменений, выполненных во втором примере конструктивного выполнения. Прежде всего, одинаковые конструктивные детали обозначены одинаковыми ссылочными обозначениями.
Существенное отличие ограничителя 1' скорости в соответствии со вторым примером конструктивного выполнения по сравнению с ограничителем 1 скорости в соответствии с первым примером конструктивного выполнения заключается в том, что вторая пружина 13' является выставляемой по-другому, предпочтительнее, а именно, в большинстве случаев более прецизионно или в большем диапазоне.
Конструкция для получения предварительного напряжения второй пружины 13' пояснена далее по тексту на основе фиг. 10-12 и на основе второй отдельной пружины 14a', которая расположена на первом эксцентриковом элементе 7a. Изложенные здесь соответствующие выкладки могут быть перенесены на другую вторую отдельную пружину 14b', которая расположена на втором эксцентриковом элементе 7b.
На первом эксцентриковом элементе 7a расположен держатель 22 пружины. В расчете на техобслуживание и выставление держатель 22 пружины выполнен с возможностью перестановки относительно эксцентрикового элемента 7a, например, выполнен с возможностью поворота с помощью регулировочного винта VS, см. фиг. 10. Во время работы подъемного устройства держатель 22 пружины жестко соединен с эксцентриковым элементом 7a.
Держатель 22 пружины в этом примере конструктивного выполнения изготовлен или, предпочтительно, выгнут из листового металла. Держатель 22 пружины имеет опорную поверхность 25. В опорной поверхности 25 штамповкой выполнено прежде всего кругообразное отверстие 26, см. фиг. 12. В смонтированном состоянии изделия отверстие 26 охватывает сопрягающий палец 2200. Опорная поверхность 25 прилегает к упору на сопрягающем пальце 2200 и, следовательно, является зафиксированной в осевом направлении, то есть в направлении, параллельном главной оси H (фиг. 1). К опорной поверхности 25 примыкает первая торцовая поверхность 27. Первая торцовая поверхность 27 выставлена относительно опорной поверхности под углом примерно в 90°. В первой торцовой поверхности 27 расположен приемный паз 24. Приемный паз 24 открыт в направлении к нижнему концу торцовой поверхности 27. В другом примере конструктивного выполнения приемный паз 24 может представлять собой также расточенное отверстие, продольное отверстие и т. п.
В состоянии эксплуатационной готовности в приемном пазу 24 лежит конец 17c' пружины, прежде всего плечо второй отдельной пружины 14a', см., прежде всего, фиг. 11.
Как показано на фиг. 12, держатель 22 пружины имеет вторую торцовую поверхность 28. Вторая торцовая поверхность 28 выставлена примерно под прямым углом относительно опорной поверхности 25 и примерно под прямым углом относительно первой торцовой поверхности 27. Кромка второй торцовой поверхности 28 образует упор 29. В состоянии эксплуатационной готовности в упор 29 упирается начальный участок конца 17a' пружины, прежде всего начальный отдел плеча второй отдельной пружины 14a'. Упор 29 находится на удалении от оси симметрии вращения сопрягающего пальца 2200. Удаление упора 29 от оси симметрии вращения сопрягающего пальца 2200 можно менять по ходу технического обслуживания, например, с помощью упомянутого регулировочного винта VS, который также можно распознать на фиг. 12, но по-другому, как это можно было бы предположить согласно покомпонентному изображению с пространственным разделением деталей – вовсе не вставкой сквозь более подробно поясняемую далее по тексту направляющую планку 21, а вкручиванием в нее снизу так, что он подпирает или выставляет по месту вторую торцовую поверхность 28. В результате изменения удаления изменяется предварительное напряжение второй пружины. Прежде всего, предварительное напряжение увеличивается при уменьшении удаления.
Как можно хорошо распознать на фиг. 12, оконечный участок конца 17a' пружины, прежде всего начальный отдел плеча второй отдельной пружины 14a' изогнут, прежде всего под углом примерно в 90° к начальному участку конца 17a' пружины. В смонтированном состоянии изделия оконечный участок конца 17a' пружины заведен в расположенное в первом центробежном грузике 8a' продольное отверстие 23. В качестве предосторожности, чтобы конец 17a' пружины в рабочем режиме случайно не выскользнул из продольного отверстия 23, предусмотрена направляющая планка 21. Направляющая планка 21 закреплена, прежде всего прикручена, на эксцентриковом элементе 7a. На направляющей планке 21 имеется направляющий паз 30. Направляющий паз 30 проходит приблизительно параллельно концу 17c пружины второй отдельной пружины 14a' и приблизительно под прямым углом к другому концу 17a' пружины второй отдельной пружины 14a'.
Продольное отверстие 23 предусмотрено дополнительно (наиболее предпочтительно), чтобы вторая пружина 13', прежде всего вторая отдельная пружина 14a', в рабочем режиме со скоростью (подъемного устройства) меньше уставки срабатывания электрической защиты, как показано на фиг. 6 и 11, не прилегала к центробежному грузику 8b', то есть, чтобы вторая пружина 13' не передавала пружинящую силу на тормоз и, следовательно, прежде всего, дополнительно не способствовала увеличению коэффициента D1 упругости.
Когда скорость (подъемного устройства), как показано на фиг. 8, 9 и 10, увеличивается до уставки срабатывания электрической защиты или сверх нее, тогда вторая пружина 13', прежде всего вторая отдельная пружина 14a', упираясь в конец продольного отверстия 23, прилегает к центробежному грузику 8b', то есть вторая пружина 13' передает пружинящую силу на тормоз и, следовательно, прежде всего, дополнительно способствует увеличению коэффициента D1 упругости, и так возникает коэффициент D2 упругости. На фиг. 8 отображено состояние для скорости на уставке срабатывания электрической защиты, на фиг.9 – состояние для скорости на уставке срабатывания механической защиты. Можно распознать, что как в состоянии со скоростью на уставке срабатывания электрической защиты, так и в состоянии со скоростью на уставке срабатывания механической защиты присутствует коэффициент D2 упругости.
Третий пример конструктивного выполнения
На фиг. 13-16 показан ограничитель 1" скорости в третьем примере конструктивного выполнения. Ограничитель 1" скорости в третьем примере конструктивного выполнения соответствует, по существу, ограничителю 1 скорости в первом примере конструктивного выполнения, так что вышесказанное в отношении ограничителя 1 скорости в соответствии с первым примером конструктивного выполнения действительно также и в отношении ограничителя 1" скорости в соответствии с третьим примером конструктивного выполнения, за исключением изменений, выполненных в третьем примере конструктивного выполнения. Прежде всего, одинаковые конструктивные детали обозначены одинаковыми ссылочными обозначениями.
Существенное отличие ограничителя 1" скорости в соответствии с третьим примером конструктивного выполнения по сравнению с ограничителем 1 скорости в соответствии с первым примером конструктивного выполнения заключается в том, что вторая пружина ограничителя 1" скорости в соответствии с третьим примером конструктивного выполнения непосредственно действует между первым центробежным грузиком 8a и вторым центробежным грузиком 8b. Вторая пружина в третьем примере конструктивного выполнения задана по меньшей мере одной винтовой пружиной, прежде всего пружиной растяжения с двумя концевыми крючками. Далее по тексту должен быть описан принцип функционирования на основе первой из двух вторых отдельных пружин 14a", причем изложенное соответственно действительно в отношении второй из двух вторых отдельных пружин – пружины 14b".
Оба центробежных грузика 8a, 8b соответственно выполнены приблизительно полукруглыми по форме, причем во внутреннем, обращенном к главной оси H (фиг. 1) сегменте предусмотрена кругообразная выемка для приема центробежных грузиков. В зоне кругообразной выемки в первом центробежном грузике 8a предусмотрено расточенное отверстие 31. В расточенном отверстии 31 подвешен конец 17c" пружины второй отдельной пружины 14a". В зоне кругообразной выемки во втором центробежном грузике 8b предусмотрено продольное отверстие 32. В продольном отверстии 32 подвешен конец 17а" пружины второй отдельной пружины 14a". Благодаря дополнительному продольному отверстию 32 конец 17a" пружины второй отдельной пружины 14a" вплоть до скорости срабатывания электрических переключающих элементов имеет равномерный люфт, так что вторая пружина 13", прежде всего вторая отдельная пружина 14a", не передает никакое усилие между обоими центробежными грузиками 8a, 8b или не осуществляет никакое силовое воздействие. Когда скорость (подъемного устройства) увеличивается, по меньшей мере, до скорости срабатывания электрических переключающих элементов тогда конец 17a" пружины второй отдельной пружины 14a" прилегает к концу продольного отверстия 32 и вторая пружина 13", прежде всего вторая отдельная пружина 14a", передает пружинящие силы и, тем самым, способствует увеличению коэффициентов упругости.
Предпочтительным может быть решение, чтобы вторая пружина, составленная из отдельных пружин 14a", 14b", была предварительно напряжена. Прежде всего, пружина является свитой с предварительным напряжением.
Предметом изобретения является не показанное на фигурах подъемно-транспортное средство с направляемой по направляющим рельсам выполненной в виде клети ходовой частью, приводной системой и взаимодействующим с направляющими рельсами тормозным приспособлением для прекращения недопустимого режима перемещения выполненной в виде клети ходовой части выполненной в виде клети ходовой части, а также с ограничителем 1, 1', 1" скорости, как он представлен в описании фигур.
Принципиальные указания относительно принципа функционирования всех вариантов конструктивного выполнения
На основе фиг. 17-20 следует теоретически пояснить принцип функционирования.
На фиг. 17 представлены общие физические характеристики центробежной силы в зависимости от скорости лифта. Центробежная сила равна произведению, полученному из массы центробежного грузика, умноженной на угловую скорость в квадрате и умноженной на радиальное удаление центробежного грузика от оси вращения: Fz=m*ω2*r.
Возникающие центробежные силы на центробежных грузиках 8a, 8b могут оказываться различными в зависимости от конструктивного выполнения. На основе фиг. 17 представлен принципиальный ход кривой центробежной силы в зависимости от скорости лифта. Показанные там значения служат всего лишь для наглядности и должны быть адаптированы в зависимости от конструктивного выполнения и местных нормативных требований.
Вплоть до определенной скорости, которая приходится, предпочтительно, на величину чуть больше номинальной скорости, то есть обычной рабочей скорости лифта, центробежная сила возрастает с квадратом угловой скорости ω, поскольку до этого момента никакое перемещение центробежных грузиков 8a, 8b наружу не происходит. Если эта скорость будет превышена, то в дополнение к возрастающей скорости увеличивается также и удаление r центра тяжести центробежного грузика 8a, 8b от оси вращения, и центробежная сила соответственно возрастает сверхпропорционально, поскольку вызванная первой пружиной 11 противодействующая сила оказывается более не в состоянии препятствовать перемещению центробежного грузика.
Это приводит к тому, что при одинаковом абсолютном приращении скорости центробежная сила увеличивается во все более возрастающей степени. В противоположность этому противодействующая сила, вызванная, например, пружинами 11, в некоторых вариантах конструктивного выполнения с перемещением центробежных грузиков 8a, 8b увеличивается только линейно. Это приводит к тому, что в верхнем диапазоне скорости чувствительность ограничителя 1 скорости по уставке скорости срабатывания (устройств защиты) возрастает, и что настройка ограничителя 1 скорости в определенном диапазоне становится все более затрудненной. Это становится очевидным, прежде всего, если действующую от центробежных грузиков 8a, 8b центробежную силу перенести на потребную пружинящую силу, чтобы представить необходимое на это перемещение центробежных грузиков.
На фиг. 18 пружинящая сила нанесена на диаграмму в привязке к пути перемещения одного из центробежных грузиков 8a, 8b вследствие центробежной силы. Благодаря предварительному напряжению первой пружины 11 центробежные грузики 8a, 8b не двигаются вплоть, по меньшей мере, до примерно номинальной скорости лифта (предпочтительно, чуть больше на 2-3%). На приращение пружинящей силы, которое необходимо, чтобы от скорости срабатывания электрических переключающих элементов выйти на скорость срабатывания механических переключающих элементов, требуется прохождение большой части пути перемещения центробежного грузика 8a, 8b. Поскольку, однако, как хорошо можно распознать, прежде всего, на фиг. 17, (центробежная) сила возрастает сверхпропорционально, прежде всего на высоких угловых скоростях, то безупречная настройка приспособления 20 для фиксации скорости срабатывания электрических и механических переключающих элементов является затрудненной. Кроме того, путь перемещения часто является ограниченным.
На фиг. 19 пружинящая сила нанесена на диаграмму в привязке к пути перемещения одного из центробежных грузиков 8a, 8b вследствие центробежной силы, причем характеристическую кривую задает нелинейная пружина или, прежде всего, первая пружина 11, а затем вторая, подключенная к первой пружине пружина 13. Вторая пружина 13 активируется, как только будет достигнута скорость срабатывания электрических переключающих элементов. В результате дополнительной пружинящей силы со стороны второй пружины 13 характеристическая кривая с этого момента становится более крутой, что приводит к тому, что потребное перемещение центробежных грузиков между уставкой скорости срабатывания электрических переключающих элементов и уставкой скорости срабатывания механических переключающих элементов уменьшается по сравнению с системой согласно фиг. 18. Дополнительно, при (известном) предварительном напряжении первой пружины 11 и моменте времени активации второй пружины 13 можно более простым путем, независимо друг от друга настраивать обе точки срабатывания скорости срабатывания электрических и механических переключающих элементов ограничителя 1 скорости.
На фиг. 20 отражен наиболее предпочтительный пример конструктивного выполнения. На фиг. 20 вторая пружина 13 предварительно напряжена, например, выставлением в упор 29. Начиная со скорости срабатывания электрических переключающих элементов то есть тогда, когда вторая пружина передает пружинящую силу, за счет предварительного напряжения получается квази-скачкообразный подъем хода характеристической кривой упругости. Благодаря этому можно дополнительно оптимизировать путь перемещения центробежного грузика 8a, 8b, прежде всего сократить его. Кроме того, вторая пружина 13 может задавать характеристическую кривую упругости с плоским ходом, то есть иметь меньший коэффициент D2 упругости. Прежде всего, коэффициент упругости второй пружины 13 меньше, чем таковой для первой пружины 11. Следовательно, после вызванного предварительным напряжением возрастания силы снова может быть представлена плоская характеристическая кривая, крутизна которой только немного больше, чем крутизна характеристической кривой для первой пружины 11. Таким образом, также и в этом диапазоне можно осуществлять настройку, опять же, без особой чувствительности.
Заключительные указания общего характера
Кроме того, независимая защита заявлена также для ограничителя скорости, который имеет отличительные признаки согласно одному или нескольким далее приведенным абзацам, которые дополнительно могут комбинироваться с отличительными признаками из одного или нескольких уже составленных зависимых пунктов формулы изобретения и/или с другими отличительными признаками из описания.
Приводимый в действие с противодействием усилиям пружинной системы от центробежной силы ограничитель (1) скорости для подъемного устройства, прежде всего для лифта, который фиксирует первую скорость срабатывания переключающих элементов, при превышении которой он включает тормоз, предпочтительно в форме тормоза, затормаживающего ведущий шкив или вал ведущего шкива, и который фиксирует вторую, более высокую скорость срабатывания переключающих элементов, при достижении которой он сам, предпочтительно, осуществляет торможение или блокирование, а затем нагружает тягой трос ограничителя скорости, отличающийся тем, что при движении подъемного устройства в любом из двух своих направлений пружинная система имеет, до упомянутой первой скорости срабатывания переключающих элементов или, предпочтительно, в любом случае до ее ближнего диапазона (+/-20%), первый коэффициент (D1) упругости, а после этого пружинная система имеет второй коэффициент (D2) упругости, превышающий первый коэффициент (D1) упругости.
Ограничитель скорости по предшествующему абзацу, отличающийся тем, что пружинная система включает в себя по меньшей мере одну пару пружин, в составе которой первая пружина сама по себе задает первый коэффициент упругости, в то время как вторая пружина таким образом закреплена с возможностью люфта, что она на участке по меньшей мере одного из ее концов поначалу еще не имеет контакта с конструктивным элементом, на который она может осуществлять передачу усилия, и что вторая пружина одновременно закреплена таким образом, что в результате обусловленного центробежной силой перемещения по меньшей мере одного конструктивного элемента ограничителя скорости она на обоих концах упирается в первую пружину и затем вместе с первой пружиной задает второй коэффициент упругости.
Ограничитель скорости по обоим предшествующим абзацам, отличающийся тем, что пружинная система включает в себя по меньшей мере одну пару пружин, из которых одна пружина является винтовой пружиной, а другая пружина является витой изгибной пружиной или пружиной кручения, то есть пружиной с центральной цилиндрической навивкой витков, от которой отстоят плечи пружины, которые скручивают эту навивку витков.
Ограничитель скорости по одному из трех предшествующих абзацев, отличающийся тем, что через витую изгибную пружину или пружину кручения проходит фиксирующий штырь (оправка).
Ограничитель скорости по одному из четырех предшествующих абзацев, отличающийся тем, что витая изгибная пружина или пружина кручения является настраиваемой относительно ее предварительного напряжения и/или момента времени ее активации за счет того, что точку опоры одного из плеч пружины перемещают.
Перечень ссылочных обозначений:
H главная ось
N вспомогательная ось
1 ограничитель скорости
2 несущая конструкция
3 цапфа оси
4 тросовый шкив
5 тормозной ротор
6 установочный палец
7a, 7b эксцентриковые элементы
220 расточенное отверстие под сопрягающий палец
2200 сопрягающий палец
8a, 8b центробежные грузики
9 неотклоненное положение
10 возвратный модуль
11 на фигурах не показано (первая пружина как одно целое)
12a, 12b первая отдельная пружина
13 на фигурах не показано (вторая пружина как одно целое)
14a, 14b вторая отдельная пружина
15a, 15b, 15c, 15d конец пружины
16 пружинная опора
17a, 17b, 17c, 17d конец пружины
18a, 18b эксцентриковый палец
19 контрящая гайка
20 приспособление
21 направляющая планка
22 держатель пружины
23 продольное отверстие
24 приемный паз
25 опорная поверхность
26 отверстие
27 первая торцовая поверхность
28 вторая торцовая поверхность
29 упор
30 направляющий паз
31 расточенное отверстие
32 продольное отверстие









Изобретение относится к ограничителю скорости. Ограничитель скорости включает тросовый шкив и тормоз. Шкив приводится тросом ограничителя во вращение в обоих направлениях вокруг оси (H). Тормоз включает по меньшей мере один установленный с возможностью поворота на шкиве эксцентриковый элемент, первый и второй центробежные грузики, возвратный модуль с пружинной системой. Элемент установлен с возможностью поворота на грузиках. При сдвиге грузиков они поворачивают элемент. Возвратный модуль оттягивает грузики в направлении их неотклоненного положения с помощью пружинящей силы. При вращении шкива до частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов, пружинная система имеет первый коэффициент (D1) упругости. А с момента частоты вращения, соответствующей скорости срабатывания элементов, - второй коэффициент (D2), превышающий первый. Ограничитель фиксирует первую скорость срабатывания переключающих элементов, при превышении которой он включает тормоз, и вторую, при достижении которой он сам осуществляет торможение или блокирование, а затем нагружает тягой трос ограничителя. Достигается увеличение безопасности и упрощение настройки ограничителя. 3 н. и 17 з.п. ф-лы, 20 ил. 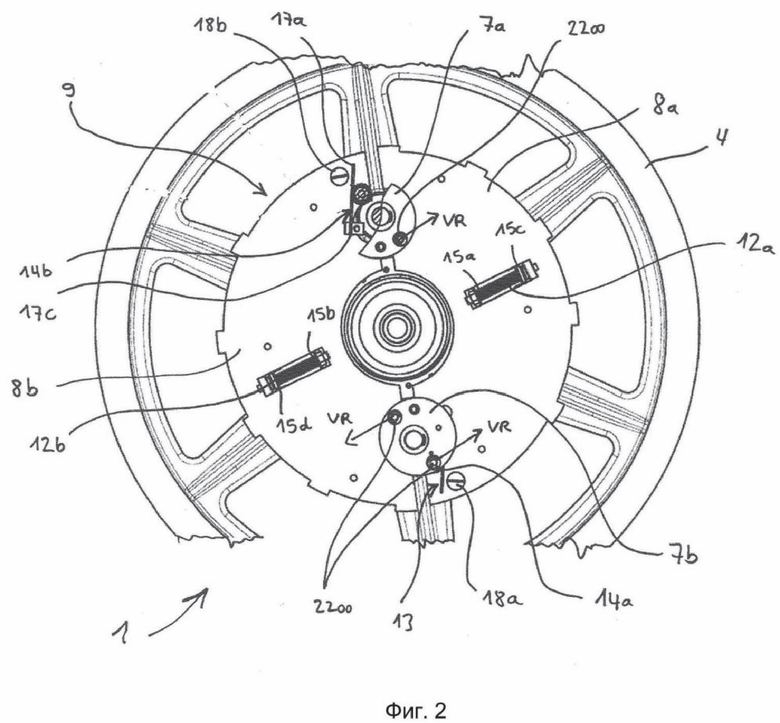
1. Ограничитель (1) скорости для подъемного устройства, прежде всего для лифта, включающий в себя тросовый шкив (4), приводимый тросом ограничителя скорости во вращение в обоих направлениях вокруг главной оси (H), и тормоз для затормаживания тросового шкива (4), причем тормоз включает в себя по меньшей мере один установленный с возможностью поворота на тросовом шкиве (4) эксцентриковый элемент (7a, 7b), причем тормоз включает в себя первый центробежный грузик (8a) и второй центробежный грузик (8b), причем эксцентриковый элемент (7a, 7b) установлен с возможностью поворота на первом центробежном грузике (8а) и с возможностью поворота на втором центробежном грузике (8b), причем при обусловленном центробежной силой сдвиге первого и второго центробежных грузиков (8а, 8b) первый и второй центробежные грузики (8а, 8b) поворачивают эксцентриковый элемент (7a, 7b), причем тормоз включает в себя возвратный модуль (10) с пружинной системой, который с помощью обеспечиваемой пружинной системой пружинящей силы оттягивает центробежные грузики (8а, 8b) в направлении их неотклоненного положения (9), отличающийся тем, что при вращении тросового шкива (4) в любом из двух своих направлений до частоты вращения тросового шкива (4), соответствующей скорости срабатывания электрических переключающих элементов, пружинная система имеет первый коэффициент (D1) упругости, а с момента частоты вращения тросового шкива (4), соответствующей скорости срабатывания электрических переключающих элементов, пружинная система имеет второй коэффициент (D2) упругости, превышающий первый коэффициент (D1) упругости.
2. Ограничитель скорости по п. 1, отличающийся тем, что первый коэффициент (D1) упругости является постоянным.
3. Ограничитель скорости по п. 1 или 2, отличающийся тем, что второй коэффициент (D2) упругости является постоянным.
4. Ограничитель скорости по одному из пп. 1-3, отличающийся тем, что пружинная система включает в себя первую пружину (11) с первым коэффициентом (D1) упругости и вторую пружину (13), причем второй коэффициент (D2) упругости получается из комбинации, прежде всего из сложения, коэффициентов упругости первой и второй пружин (11, 13).
5. Ограничитель скорости по п. 4, отличающийся тем, что первая пружина (11) является пружиной сжатия и одним концом (15а) пружины опирается на первый центробежный грузик (8а), что первая пружина (11) другим концом (15с) пружины опирается на пружинную опору (16) и что пружинная опора (16) функционально соединена со вторым центробежным грузиком (8b).
6. Ограничитель скорости по п. 4 или 5, отличающийся тем, что вторая пружина (13") является пружиной растяжения, что вторая пружина (13") одним концом (17а") пружины прикреплена, прежде всего подвешена, к первому центробежному грузику (8а) и что вторая пружина (13") другим концом (17с") пружины прикреплена, прежде всего подвешена, ко второму центробежному грузику (8b).
7. Ограничитель скорости по п. 4 или 5, отличающийся тем, что вторая пружина (13) является витой изгибной пружиной, что одно плечо опирается на эксцентриковый элемент (7a, 7b) и что, самое позднее, с частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов, другое плечо опирается на один из двух центробежных грузиков (8a, 8b).
8. Ограничитель скорости по одному из пп. 4-7, отличающийся тем, что к одному из центробежных грузиков (8a, 8b) прикреплен упорный палец и что упорный палец служит в качестве упора для второй пружины (13).
9. Ограничитель скорости по п. 8, отличающийся тем, что упорный палец выполнен как эксцентриковый палец (18a, 18b).
10. Ограничитель скорости по одному из пп. 4-9, отличающийся тем, что вторая пружина (13) является предварительно напряженной.
11. Ограничитель скорости по п. 10, отличающийся тем, что вторая пружина (13) закреплена на прикрепленном с возможностью перестановки к эксцентриковому элементу (7a, 7b) держателе (22) пружины и что, прежде всего, предварительное напряжение второй пружины (13) является настраиваемым посредством перестановки держателя (22) пружины.
12. Ограничитель скорости по одному из пп. 4-11, отличающийся тем, что один конец второй пружины (13) выполнен с возможностью перемещения в продольном отверстии (23, 32) до частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов, и что продольное отверстие (23, 32) расположено, прежде всего, в одном из двух центробежных грузиков (8a, 8b).
13. Ограничитель скорости по одному из пп. 4-12, отличающийся тем, что тормоз включает в себя два расположенных с возможностью поворота на тросовом шкиве (4) эксцентриковых элемента (7a, 7b), причем каждый из эксцентриковых элементов (7a, 7b) установлен с возможностью поворота на первом центробежном грузике (8а) и с возможностью поворота на втором центробежном грузике (8b), причем при обусловленном центробежной силой сдвиге первого и второго центробежных грузиков (8a, 8b) первый и второй центробежные грузики (8a, 8b) поворачивают эксцентриковые элементы (7a, 7b), что первая пружина (11) состоит из двух первых, прежде всего конструктивно идентичных, отдельных пружин (12a, 12b), что каждая из первых отдельных пружин (12a, 12b) одним ее концом (15a, 15b) пружины опирается на один из двух центробежных грузиков (8a, 8b) и что каждая из первых отдельных пружин (12a, 12b) другим ее концом (15c, 15d) пружины опирается на пружинную опору (16), причем обе первые отдельные пружины (12a, 12b) функционально соединены друг с другом через пружинную опору (16), и что вторая пружина (13) состоит из соответственно двух вторых, прежде всего конструктивно идентичных, отдельных пружин (14a, 14b), что, прежде всего, по меньшей мере, с частоты вращения, соответствующей скорости срабатывания электрических переключающих элементов, каждая из вторых отдельных пружин (14a, 14b) одним ее концом (17a, 17b) пружины опирается на один из двух центробежных грузиков (8a, 8b), а другим ее концом (17c, 17d) пружины опирается на соответственно один эксцентриковый элемент (7a, 7b).
14. Ограничитель скорости по одному из пп. 1-13, отличающийся тем, что первая пружина (11) является предварительно напряженной и что первая пружина (11) является, прежде всего, предварительно напряженной настолько сильно, что возникающие центробежные силы перемещают центробежные грузики (8a, 8b) только с момента частоты вращения, которая максимально примерно на 10%, прежде всего максимально примерно на 5%, предпочтительно максимально примерно на 2-3% выше развиваемой в обычном ходовом режиме номинальной частоты вращения.
15. Приводимый в действие с противодействием усилиям пружинной системы от центробежной силы ограничитель (1) скорости для подъемного устройства, прежде всего для лифта, который фиксирует первую скорость срабатывания переключающих элементов, при превышении которой он включает тормоз, предпочтительно в форме тормоза, затормаживающего ведущий шкив или вал ведущего шкива, и который фиксирует вторую, более высокую скорость срабатывания переключающих элементов, при достижении которой он сам, предпочтительно, осуществляет торможение или блокирование, а затем нагружает тягой трос ограничителя скорости, чтобы вызвать по меньшей мере одно последующее действие, отличающийся тем, что при движении подъемного устройства в любом из двух своих направлений пружинная система имеет, до упомянутой первой скорости срабатывания переключающих элементов или, предпочтительно, в любом случае до ее ближнего диапазона (+/-20%), первый коэффициент (D1) упругости, а после этого пружинная система имеет второй коэффициент (D2) упругости, превышающий первый коэффициент (D1) упругости.
16. Ограничитель скорости по п. 15, отличающийся тем, что пружинная система включает в себя по меньшей мере одну пару пружин, в составе которой первая пружина сама по себе задает первый коэффициент упругости, в то время как вторая пружина таким образом закреплена с возможностью люфта, что она на участке по меньшей мере одного из ее концов поначалу еще не имеет контакта с конструктивным элементом, на который она может осуществлять передачу усилия, и что вторая пружина одновременно закреплена таким образом, что в результате обусловленного центробежной силой перемещения по меньшей мере одного конструктивного элемента ограничителя скорости она на обоих концах упирается в первую пружину и затем вместе с первой пружиной задает второй коэффициент упругости.
17. Ограничитель скорости по п. 15 или 16, отличающийся тем, что пружинная система включает в себя по меньшей мере одну пару пружин, из которых одна пружина является винтовой пружиной, а другая пружина является витой изгибной пружиной или пружиной кручения, то есть пружиной с центральной цилиндрической навивкой витков, от которой отстоят плечи, которые скручивают эту навивку витков.
18. Ограничитель скорости по одному из пп. 15-17, отличающийся тем, что через витую изгибную пружину или пружину кручения проходит фиксирующий штырь.
19. Ограничитель скорости по одному из пп. 15-18, отличающийся тем, что витая изгибная пружина или пружина кручения является настраиваемой относительно ее предварительного напряжения и/или момента времени ее активации за счет того, что точку опоры одного из плеч перемещают.
20. Подъемно-транспортное средство с направляемой по направляющим рельсам выполненной в виде клети ходовой частью, приводной системой и взаимодействующим с направляющими рельсами тормозным приспособлением для прекращения недопустимого режима перемещения выполненной в виде клети ходовой части, а также с ограничителем (1) скорости по одному из пп. 1-19 для срабатывания тормозного и улавливающего приспособления.
| US 8950554 А1, 10.11.2011 | |||
| WO 2010046489 A1, 29.04.2010 | |||
| DE 102007052280 А1, 28.05.2009 | |||
| DE 3446337 А1, 10.10.1985 | |||
| Динамический индикатор физических величин | 1986 |
|
SU1800270A1 |
| WO 2012086026 A1, 28.06.2012. | |||

