Изобретение относится к области радиосвязи, в частности к способу юстировки антенных систем при прокладке трасс радиорелейных станций, и может использоваться при организации каналов связи между мобильными и стационарными комплексами связи.
Известен способ грубой юстировки антенн радиорелейных станций, [Патент RU №2340987, МПК H01Q 3/20, опубл. 10.05.2008 г.], основанный на том, что ориентация антенн осуществляется с помощью бытового GPS-приемника с интегрированным барометрическим альтиметром. Согласно данному способу определяют сначала местоположение и высоту первой точки и заносят данные в память прибора, затем определяют местоположение и высоту второй точки и, используя функцию поиска обратного пути по стрелке прибора, ориентируют антенну по азимуту в горизонтальной плоскости.
Недостатком данного способа является погрешность при ориентации антенн в горизонтальной плоскости. Эта погрешность возникает при использовании функции поиска обратного пути по стрелке прибора (GPS-приемника): для определения направления прибор должен находиться в прямолинейном движении. Точность определения тем выше, чем длиннее и прямолинейнее пройденный в процессе измерения путь. Антенны радиорелейных станций являются стационарными (при организации радиорелейных трасс), поэтому для определения направления обратного пути необходима имитация движения с GPS-приемником, что неизбежно приводит к возникновению ошибок при ориентации антенн в горизонтальной плоскости.
Наиболее близким к предложенному является способ юстировки антенн радиорелейных станций, представленный в RU 2432648 С1 МПК H01Q 3/18, опуб. 27.10.2011.
Способ юстировки антенн радиорелейных станций включает определение для каждой антенны местоположения и высоты с помощью спутниковой навигационной системы ГЛОНАСС и величину магнитного склонения, затем при помощи компаса определяют магнитный азимут нулевого положения антенны, совпадающий с магнитным азимутом оси автомобиля и вычисляют значение абсолютного азимута нулевого положения антенны. При помощи решения обратной геодезической задачи определяют абсолютный азимут антенны на цель и вычисляют угол поворота антенны в горизонтальной плоскости, который равен сумме абсолютного азимута нулевого положения антенны и абсолютного азимута антенны на цель. Ориентацию антенны в вертикальной плоскости производят путем расчета угла места.
Недостатком известной системы является снижение точности юстировки в результате привязки к магнитному азимуту оси автомобиля, снижение точности юстировки в результате применения расчетов, основанных только на системе ГЛОНАСС, малая точность юстировки в вертикальной плоскости, связанная с погрешностью при вычислении угла места, а также опора на известное местоположение обоих радиорелейных станций. Точность системы ГЛОНАСС составляет от 45 до 3 метров, в зависимости от покрытия спутников, и соответственно, от этого зависит точность настройки антенн в горизонтальной плоскости. Согласно ТТХ навигационной аппаратуры потребителей глобальных навигационных спутниковых систем ГЛОНАСС и GPS для индивидуального пользования Орион [https:/вооружение.рф/armament/orion/], предельная погрешность координат местоположения определения навигационных параметров с вероятностью 0,95 составляет 10 метров, предельная погрешность определения координат высоты навигационных параметров с вероятностью 0,95 составляет 15 метров.
Техническим результатом изобретения является повышение точности юстировки антенн радиорелейных станций, обеспечение настройки радиорелейных станций в различных географических условиях и повышение скорости развертывания мобильных радиорелейных станций за счет автоматизации процесса юстировки.
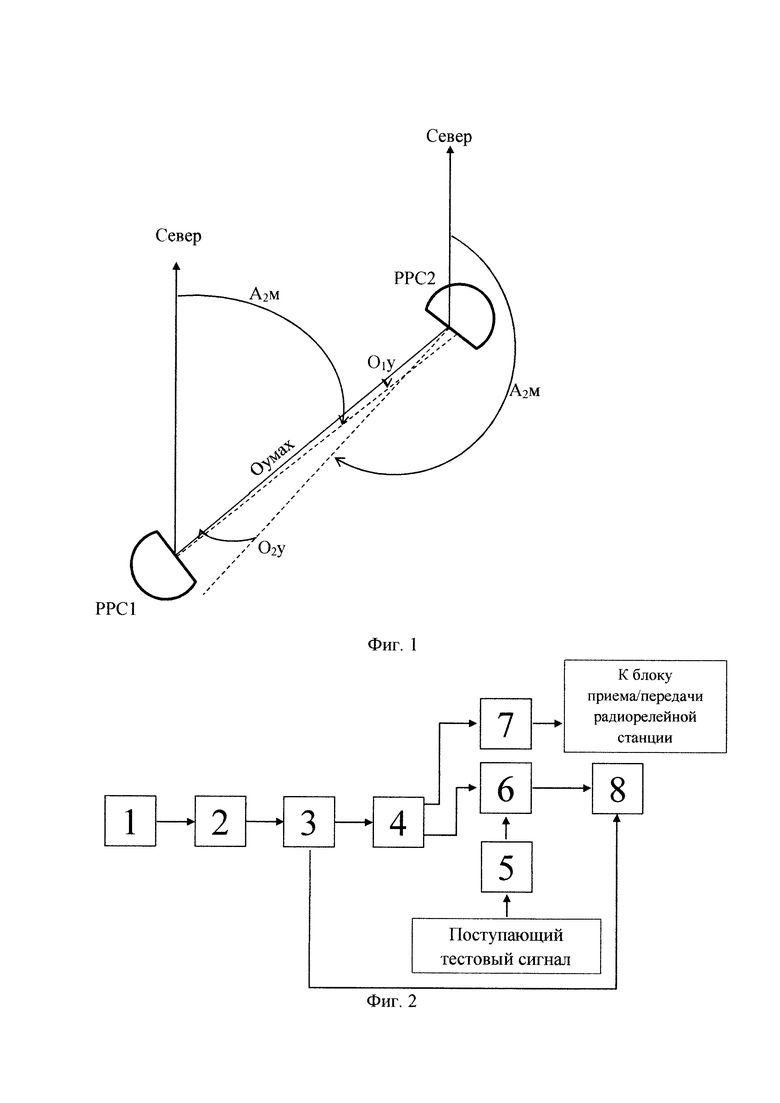
Указанный технический результат достигается тем, что определяют для каждой антенны местоположение, высоту, магнитное склонение и определяют угол поворота антенны в горизонтальной плоскости. Согласно изобретению, первоначальное определение координат местоположения своей антенны радиорелейной станции и высоты над уровнем моря осуществляется при помощи спутниковой системы ГЛОНАСС, либо, при отсутствии сигнала спутниковой системы ГЛОНАСС, определение местоположения своей радиорелейной станции производится при помощи карты, затем при помощи барометрического высотомера определяется высота своей антенны над уровнем моря, далее при помощи компаса определяется истинное направление на север, затем производится совмещение направления антенн станции с магнитным меридианом, затем на основе полученных данных происходит ориентирование своей антенны радиорелейной станции в направлении другой станции. Ориентирование происходит на основе расчета магнитного азимута (Ам) - угла, отсчитанного от северного направления магнитного меридиана до заданной точки, также на основе магнитного азимута происходит независимое принятие станциями решения о роли ведущей или ведомой, если Ам<180, то станция является ведомой, если Ам>180 - ведущей, при этом относительный угол направления у обоих станций принимается равным нулю. Далее, происходит грубая юстировка антенн в горизонтальной плоскости, на основе роли ведущий/ведомый, антенна ведомой радиорелейной станции остается неподвижной и излучает тестовый сигнал, а ведущая радиорелейная станция осуществляет поворот антенны в горизонтальной плоскости в секторе ±10° с шагом 1° от относительного угла, при этом ведущая радиорелейная станция осуществляет измерение уровня мощности тестового сигнала от ведущей станции и запоминает максимальный уровень мощности сигнала. После прохождения ведущей станцией полного сектора, ведущая станция поворачивает свою антенну на точный горизонтальный угол (Туг), соответствующий максимальному уровню сигнала, затем ведущая радиорелейная станция осуществляет измерение мощности сигнала путем поворота антенны на 0,5° левее и правее значения точного горизонтального угла, при нахождении более высокого уровня мощности, значение максимального уровня сигнала и значение точного угла обновляется и антенна фиксируется в этом горизонтальном положении. После этого осуществляется процедура настройки в вертикальной плоскости, а именно, ведущая станция осуществляет поворот антенны в вертикальной плоскости в секторе ±5° с шагом 0,5° от относительного угла в вертикальной плоскости, при этом, ведущая радиорелейная станция осуществляет измерение уровня мощности тестового сигнала от ведущей станции и запоминает максимальный уровень мощности сигнала, после прохождения ведущей станцией полного сектора, ведущая станция поворачивает свою антенну на точный вертикальный угол (Тув), соответствующий максимальному уровню сигнала, затем ведущая радиорелейная станция осуществляет измерение мощности сигнала на 0,25° выше и ниже точного угла, при нахождении более высокого уровня мощности, значение максимального уровня сигнала и значение точного угла обновляется и антенна фиксируется в этом вертикальном положении. Далее описанный алгоритм выполняет ведомая станция, после чего обе станции сигнализируют об окончании точной настройки, схема настройки представлена на фигуре 1.
Предложенный способ юстировки антенн радиорелейных станций по максимальному уровню принимаемого сигнала, в отличие от применяемых в настоящее время, позволяет существенно сократить время на юстировку антенн в горизонтальной и вертикальной плоскости на основе максимального уровня сигнала, что в свою очередь, прямо повлияет на качество радиорелейной трассы и скорость ее развертывания.
Способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фигуре 2, где обозначено: 1 - блок определения местоположения ГЛОНАСС, 2 - блок формирования исходных данных; 3 - блок расчета параметров; 4 - блок принятия решения ведущий/ведомый; 5 - блок измерения мощности принимаемого (тестового) сигнала, 6 - блок настройки; 7 - блок формирования тестового сигнала, 8 - блок управления приводами антенны.
Устройство работает следующим образом: исходные данные, определенные при помощи системы ГЛОНАСС поступают в блок формирования исходных данных, при отсутствии сигнала от системы ГЛОНАСС, данные карты, компаса, барометрического высотомера, заносятся в блок формирования исходных данных. Далее сигнал поступает в блок расчета параметров, который может быть реализован программным способом на однокристальной ЭВМ, где происходит вычисление направления на другую антенну и формируется управляющий сигнал для блока управления приводов антенны для установления направления на другую станцию. Затем результаты расчетов поступают в блок принятия решения на определение антенны ведущей или ведомой. Если станция является ведомой, то с блока принятия решения сигнал поступает в блок настройки, откуда поступает управляющий сигнал для фиксации антенны в текущем положении, а также в блок формирования тестового сигнала для формирования тестового сигнала, который дальше поступает на приемо-передающее устройство радиорелейной станции. Если станция является ведущей, то сигнал от блока принятия решения поступает в блок настройки для выработки управляющего сигнала для блока управления приводами антенны, затем блок управления приводами антенны в зависимости от управляющего сигнала осуществляет поворот антенны в заданном секторе, при этом осуществляется измерение мощности поступающего тестового сигнала в блоке измерения мощности принимаемого (тестового) сигнала и запоминание его значения, с выдачей команды на запоминание текущего угла как точного угла в блок настройки, из блока настройки сигнал управления антенной поступает в блок управления приводом антенны до тех пор, пока не будет завершен полный цикл поворота в заданных секторах в горизонтальной плоскости, далее из блока настройки поступает сигнал на поворот антенны в секторе 0,5° левее и правее значения точного горизонтального угла, далее по описанному алгоритму осуществляется настройка антенны в вертикальной плоскости. Далее при осуществлении настройки в обоих плоскостях, из блока принятия решения поступает сигнал о смене роли ведущий/ведомый, работа алгоритма продолжается до тех пор, пока каждая радиорелейная станция не выполнит цикл настройки в горизонтальной и вертикальной плоскости в роли ведущей и ведомой станции, затем настройка прекращается, и блок настройки подает сигнал о ее завершении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЮСТИРОВКИ АНТЕНН РАДИОРЕЛЕЙНЫХ СТАНЦИЙ | 2010 |
|
RU2432648C1 |
| СПОСОБ ГРУБОЙ ЮСТИРОВКИ АНТЕНН РАДИОРЕЛЕЙНЫХ СТАНЦИЙ | 2006 |
|
RU2340987C2 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ ПОЗИЦИОНИРОВАНИЯ ДЛЯ МАЛЫХ АНТЕННЫХ СИСТЕМ | 2021 |
|
RU2766544C1 |
| СИСТЕМА И СПОСОБ РАДИОРЕЛЕЙНОЙ СВЯЗИ С ЭЛЕКТРОННОЙ ПОДСТРОЙКОЙ ЛУЧА | 2011 |
|
RU2585309C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2004 |
|
RU2279100C2 |
| Модульная передающая активная фазированная антенная решетка | 2022 |
|
RU2786343C1 |
| ПЕРЕНОСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ РАЗВЕДКИ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ЦИФРОВОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2023 |
|
RU2832238C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| РЕТРАНСЛЯТОР | 2023 |
|
RU2808202C1 |
Использование: изобретение относится к области радиосвязи, в частности к способу юстировки антенных систем при прокладке трасс радиорелейных станций, и может использоваться при организации каналов связи между мобильными и стационарными комплексами связи. Сущность: способ включает в себя определение местоположения своей антенны, ее высоты над уровнем моря при помощи спутниковой навигационной системы ГЛОНАСС, а в случае отсутствия сигнала ГЛОНАСС определение местоположения обоих радиорелейных станций при помощи карты, а высоты своей антенны над уровнем моря при помощи барометрического высотомера, принятие радиорелейными станциями решения о роли ведущего и ведомого, ориентирования антенн станций в направлении друг друга, обнуление относительного угла, фиксацию положения антенны ведомой радиорелейной станции в горизонтальном положении, излучение ведомой станцией тестового сигнала, настройку антенны ведущей станцией в горизонтальной плоскости на максимальный уровень сигнала ведомой станции, обновление точного угла при нахождении более мощного сигнала с фиксацией антенны в этом горизонтальном положении, настройку ведущей станции по максимальному уровню мощности принимаемого сигнала в вертикальной плоскости по такому же алгоритму, как и при настройке в горизонтальной плоскости, проведение описанной настройки ведомой станцией с фиксацией положения антенны ведущей станции, с изменением положения в горизонтальной и вертикальной плоскости антенной ведомой станции, сигнализации обеих станций об окончании юстировки. Технический результат - сокращение времени на юстировку антенн в горизонтальной и вертикальной плоскости на основе максимального уровня принимаемого сигнала, что, в свою очередь, прямо повлияет на качество связи, организованной радиорелейной трассой, и скорость ее развертывания. 2 ил.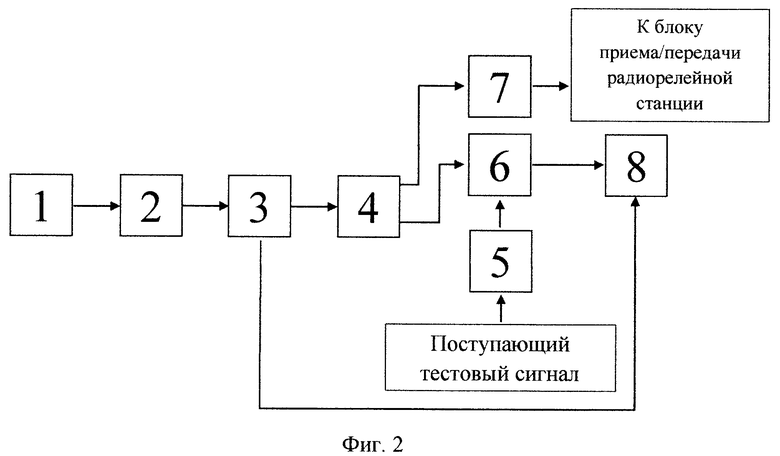
Способ юстировки антенн радиорелейных станций по максимальному уровню принимаемого сигнала, основанный на определении для каждой антенны местоположения, высоты антенны над уровнем моря с помощью спутниковой навигационной системы ГЛОНАСС, а с помощью компаса магнитного склонения и угла поворота антенны в горизонтальной плоскости относительно магнитного меридиана, отличающийся тем, что определение местоположения своей антенны, ее высоты над уровнем моря при наличии сигнала осуществляется при помощи спутниковой навигационной системы ГЛОНАСС, а в случае отсутствия сигнала ГЛОНАСС определение местоположения обоих радиорелейных станций осуществляется при помощи карты, высота своей антенны над уровнем моря измеряется при помощи барометрического высотомера, далее, в зависимости от значения магнитного азимута, обе радиорелейные станции независимо друг от друга принимают решение о роли ведущего и ведомого, антенны станций ориентируются в направлении друг друга, относительный угол принимается равным нулю, далее, на основе полученных данных, антенна ведомой радиорелейной станции остается неподвижной и излучает тестовый сигнал, в это время ведущая станция осуществляет поворот антенны в горизонтальной плоскости в секторе ±10° с шагом 1° от относительного угла, при этом измеряя и запоминая максимальный уровень принимаемого сигнала от ведомой станции и угол поворота антенны, затем, после прохождения ведущей станцией полного сектора, ведущая радиорелейная станция поворачивает свою антенну на точный угол, соответствующий максимальному уровню мощности сигнала, затем осуществляет измерение уровня мощности принимаемого сигнала при повороте антенны на 0,5° левее и правее значения уже полученного точного горизонтального угла, при нахождении более высокого уровня мощности значение максимальной мощности и точного горизонтального угла обновляется и антенна фиксируется в этом горизонтальном положении, после этого осуществляется такая же процедура настройки ведущей станции по максимальному уровню мощности принимаемого сигнала в вертикальной плоскости, а именно ведущая станция осуществляет поворот антенны в вертикальной плоскости в секторе ±5° с шагом 0,5° от относительного угла в вертикальной плоскости, при этом измеряя и запоминая максимальный уровень принимаемого сигнала от ведомой станции и угол поворота антенны, затем, после прохождения ведущей станцией полного сектора, ведущая радиорелейная станция поворачивает свою антенну на точный вертикальный угол, соответствующий максимальному уровню мощности сигнала, затем осуществляет измерение уровня мощности принимаемого сигнала путем поворота антенны на 0,25° выше и ниже уже полученного точного вертикального угла, при нахождении более высокого уровня мощности значение максимальной мощности и точного вертикального угла обновляется и антенна фиксируется в этом вертикальном положении, далее такую же настройку своей антенны осуществляет и ведомая станция, при этом теперь антенна ведущей станции остается неподвижной, а антенна ведомой станции осуществляет изменение своего положения в горизонтальной и вертикальной плоскости, после чего обе станции сигнализируют об окончании юстировки.
| СПОСОБ ЮСТИРОВКИ АНТЕНН РАДИОРЕЛЕЙНЫХ СТАНЦИЙ | 2010 |
|
RU2432648C1 |
| Волноводный щелевой мост | 1957 |
|
SU117759A1 |
| СПОСОБ ГРУБОЙ ЮСТИРОВКИ АНТЕНН РАДИОРЕЛЕЙНЫХ СТАНЦИЙ | 2006 |
|
RU2340987C2 |
| СИСТЕМА РАДИОРЕЛЕЙНОЙ СВЯЗИ С ПОДСТРОЙКОЙ ЛУЧА | 2014 |
|
RU2595941C2 |
| US 20180316411 A1, 01.11.2018 | |||
| WO 2002033785 A1, 25.04.2002. | |||

