Настоящее изобретение относится к области связи, а именно к оборудованию для систем навигации, в частности к системам быстрого наведения немоторизованных антенных систем малого диаметра апертуры на спутник-ретранслятор.
В настоящее время динамично развивается спутниковая связь, а значит, требуется соответствующее оборудование для ее обеспечения. Основной функциональной частью такого оборудования является спутниковая антенная система.
При развертывании малой спутниковой земной станции необходимо добиться приема спутникового сигнала максимальной мощности через спутник-ретранслятор в кратчайшие сроки. Для этого антенную систему наводят на спутник-ретранслятор по азимуту (в горизонтальной плоскости) и углу места (в вертикальной плоскости). Обычно процесс наведения антенной системы занимает много времени и требует высокой квалификации от персонала, который проводит настройку антенны.
Так, при наведении антенной системы на спутник-ретранслятор всегда нужно учитывать магнитное склонение Земли, которое зависит от географического места развертывания антенной системы, что усложняет процесс наведения.
В настоящее время основная масса антенных систем механизированы, и содержат опорно-поворотные устройства с системой двигателей, которые обеспечивают наведения антенны по азимуту и углу места. Такие спутниковые антенны немобильны и конструктивно достаточно сложны, что увеличивает их стоимость, а также требует определенных навыков от персонала, который занимается монтажом и настройкой таких антенн. Примерами антенных систем с системой механизации могут служить, в частности, антенные системы, описанные в патентах РФ №/№. 13724U, 161587U, 2461926.
Поэтому в настоящее время разработка устройств, позволяющих оперативно навести антенную систему на спутник-ретранслятор, без привлечения специалистов и использования специального оборудования, является актуальной задачей. Быстрое и точное наведение антенной системы по углу места и по углу азимуту позволит оперативно получать доступ к информационным ресурсам в любой точке мира.
В принципе, устройства для наведения спутниковых антенн на спутник-ретранслятор известны из уровня техники.
В патенте РФ на полезную модель 193423 описано устройство для наведения спутниковой антенны по углу места, включающее корпус с элементом его крепления на антенне, а также угловую градусную шкалу, предназначенную для установки значения угла поворота антенны, при этом корпус выполнен в виде пластины, на одной из сторон которой нанесена угловая градусная шкала, корпус имеет возможность фиксации на антенне посредством элемента крепления в заданном угловом положении относительно антенны, причем устройство оснащено пузырьковым уровнем, установленным на одной из сторон корпуса, а элемент крепления корпуса на антенне размещен на противоположной стороне корпуса. Недостатком такого решения является то, что оно позволяет навести спутниковую антенную только по углу места, но никак не затрагивает наведение антенны по азимуту.
В патенте США US 2012068899 описано устройство автоматизации позиционирования для малых антенных систем, содержащее дисплей, клавиатуру, GPS-приемник, внутреннюю память, позиционер/процессор и аккумуляторную батарею, выполненные в едином корпусе, при этом устройство содержит компас, инклинометр и компенсацию угла наклона. Процесс взаимодействия с оператором происходит через встроенные в устройство дисплей и клавиатуру. Устройство выполнено в пылевлагозащитном исполнении. Недостатком такого решения является то, что оно является громоздким: его необходимо переносить или перевозить в компактном контейнере. При установке данного устройства необходимо тратить время на его сборку: подключение к двигательным элементам (моторам) опорно-поворотного устройства антенны, дополнительно - компьютера, установка опорных штативов.
Задачей настоящего изобретения является устранение указанных выше недостатков.
Для этого предложено устройство автоматизации позиционирования для малых антенных систем, содержащее дисплей, клавиатуру, модуль ГНСС(глобальной навигационной спутниковой системы), внутреннюю память, позиционер/процессор и источник питания, выполненные в едином корпусе, при этом клавиатура, модуль ГНСС подключены напрямую к позиционеру/процессору, который выводит информацию на дисплей, и все элементы устройства подключены к одному внутреннему источнику питания, при этом на корпусе устройства имеется внешний разъем, к которому подключены выполненные как единое целое и с возможностью крепления на антенной системе трехосевой компас с компенсацией угла наклона и датчик уровня принимаемого сигнала.
На антенную систему, которую необходимо навести на спутник-ретранслятор, устанавливается трехосевой компас и датчик уровня принимаемого сигнала и подключается к устройству. Устройство проводит обработку полученных от трехосевого компаса и датчика уровня принимаемого сигнала данных и выводит на дисплее указание в какую сторону и на какой угол следует поворачивать антенну, одновременно показывая на дисплее уровень принимаемого антенной сигнала.
Альтернативные варианты исполнения изобретения представлены в зависимых пунктах.
Техническим результатом настоящего изобретения является простота эксплуатации и, как следствие, обеспечение оперативного наведения спутниковой антенны, или нескольких спутниковых антенн малой апертуры по углу места и азимуту. Этого удалось добиться за счет того, что заявленное устройство работает с трехосевым компасом с компенсацией угла наклона и датчиком уровня принимаемого сигнала, это позволяет наводить антенну не только по азимуту, но и по углу месту с учетом мощности принимаемого сигнала. Благодаря тому, что заявленное устройство выполнено в едином корпусе, а трехосевой компас и датчик уровня принимаемого сигнала крепятся на антенную систему, и оно свободно помещается в руке и готово к работе сразу, после подключения к нему трехосевого компаса и датчик уровня принимаемого сигнала.
Далее изобретение более подробно поясняется на основе приложенных чертежей, на которых показано:
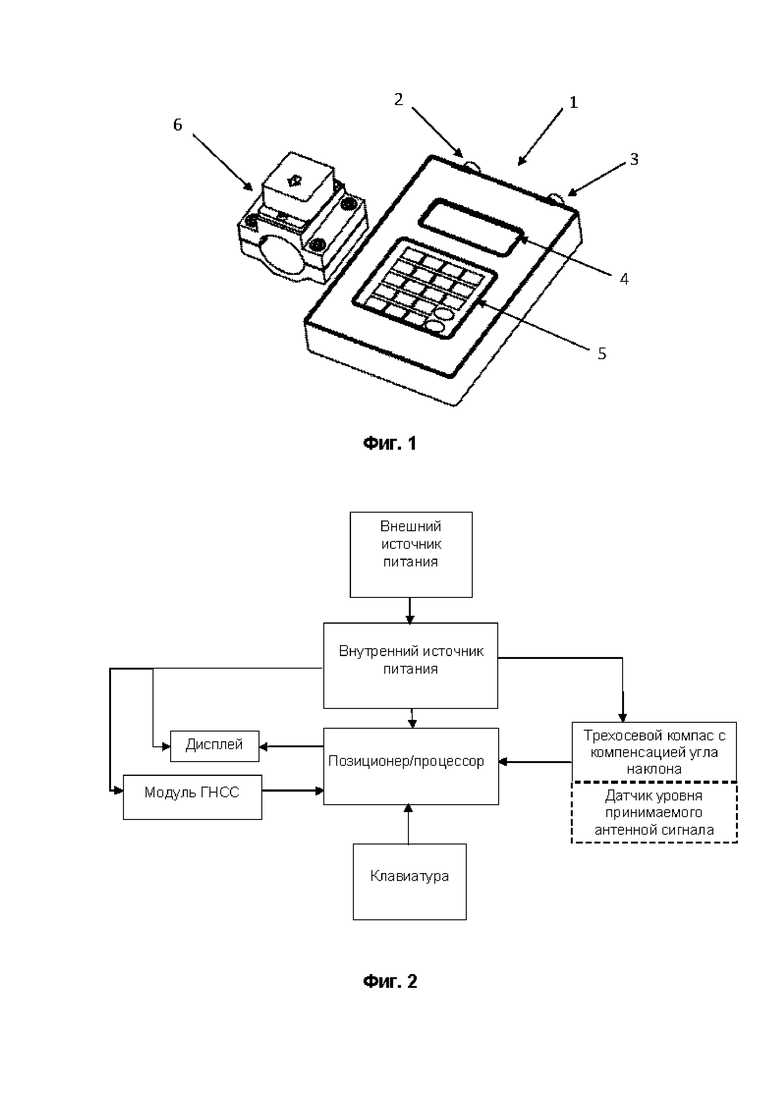
Фиг. 1 - общий вид устройства с компасом и датчиком уровня сигнала;
Фиг. 2 - блок-схема показывающая принцип работы устройства.
На Фиг. 1 изображено устройство автоматизации позиционирования для малых антенных систем (1), содержащее дисплей (4), клавиатуру (5), модуль ГНСС(не показано), внутреннюю память(не показано), позиционер/процессор (не показано), который осуществляет обработку данных и выводит результат обработки на дисплей устройства, и источник питания(не показано), выполненные в едином корпусе. На корпусе расположен разъем (2) для подключение трехосевого компаса (6) с компенсацией угла наклона и с датчиком уровня принимаемого сигнала, и, не обязательно, разьем (3) для подключения внешнего источника питания. Компас с датчиком имеют приспособление для крепления на антенне.
В качестве модуля ГНСС может быть использован модуль GPS, и/или ГЛОНАСС, и/или Galileo, и/или Beidou, также могут использоваться модули других ГНСС.
В качестве внутреннего питания может быть использована батарея, или аккумуляторная батарея, которую можно заряжать - при наличии разъема для внешнего питания - не извлекая из корпуса устройства. Также устройство - при наличии разъема - может работать от внешнего питания. Разъемом для внешнего питания может быть, в частности, USB - разъем.
Внутренняя память используется для автоматического сохранения последних данных о точке размещения антенны, которую наводили с помощью заявленного устройства. Кроме того, во внутреннюю память записываются, например, данные о широте и долготе местоположения антенны, точка стояния спутника-ретранслятора, на который наводилась антенна, а также величина офсетного угла антенны. При начале работы с устройством по наведению новой антенны на спутник-ретранслятор на дисплей можно вывести информации о последнем наведении антенны и если географическое положение (широта и долгота) новой антенны совпадает с данными из внутренней памяти устройства, то антенну можно навести, согласно сохраненным данным, что позволит ускорить процесс наведения.
На Фиг. 2 представлена блок-схема, отражающая работу устройства автоматизации позиционирования. Устройство работает следующим образом. На штангу облучателя собранной антенны устанавливается трехосевой компас с компенсацией угла наклона и датчик уровня принимаемого сигнала. Компас (6) с датчиком уровня принимаемого сигнала подключаются к устройству через разъем (1) (фиг. 1) с помощью кабеля. После подключения компаса устройство включается. После этого на дисплее устройства выводится координаты точки места размещения антенны: широта и долгота, которые определяет компас. После этого на устройстве, с помощью клавиатуры, вводятся значения магнитного склонения Земли и координаты точки стояния космического аппарата с ретранслятором на борту, которые могут быть сохранены во внутреннюю память устройства. После обработки позиционером/процессором введенных данных, устройство выдает на дисплее рассчитанные угол места и азимут, разницу между истинным направлением на космический аппарат, а также текущий уровень сигнала, принимаемый антенной. Перемещением антенны право-влево, вверх-вниз оператор, который занимается наведением антенны на спутник-ретранслятор, добивается разницы равной нулю или близкой к нулю при максимальном уровне принимаемого сигнала, что означает правильное наведение антенны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗАЦИИ ПОЗИЦИОНИРОВАНИЯ ДЛЯ БОЛЬШИХ АНТЕННЫХ СИСТЕМ | 2021 |
|
RU2784751C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ (ВАРИАНТЫ) И УСТРОЙСТВО ОРИЕНТИРОВАНИЯ ПУСКОВОЙ УСТАНОВКИ ВООРУЖЕНИЯ | 2011 |
|
RU2463542C1 |
| АБОНЕНТСКАЯ ЗЕМНАЯ СТАНЦИЯ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2816866C1 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2204783C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ПРИ ОПРЕДЕЛЕНИИ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ СУДНА В УСЛОВИЯХ НАРУШЕНИЯ СТРУКТУРЫ ПРИНИМАЕМЫХ СИГНАЛОВ ГНСС СУДОВОЙ ИНФРАСТРУКТУРОЙ | 2016 |
|
RU2661336C2 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2591647C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |
Изобретение относится к антенной технике, в частности к системам автоматизации позиционирования для быстрого наведения немоторизованных антенных систем малого диаметра апертуры на спутник-ретранслятор. Техническим результатом является обеспечение оперативного наведения спутниковой антенны малой апертуры по углу места и азимуту. Технический результат достигается тем, что устройство автоматизации позиционирования для малых антенных систем, содержащее дисплей, клавиатуру, модуль ГНСС (глобальной навигационной спутниковой системы), внутреннюю память, позиционер/процессор и источник питания, выполненные в едином корпусе, при этом клавиатура, модуль ГНСС подключены напрямую к позиционеру/процессору, который выводит информацию на дисплей, и все элементы устройства подключены к одному внутреннему источнику питания, отличается тем, что на корпусе устройства имеется внешний разъем, к которому подключены выполненные как единое целое и с возможностью крепления на антенной системе трехосевой компас с компенсацией угла наклона и датчик уровня принимаемого сигнала. 6 з.п. ф-лы, 2 ил.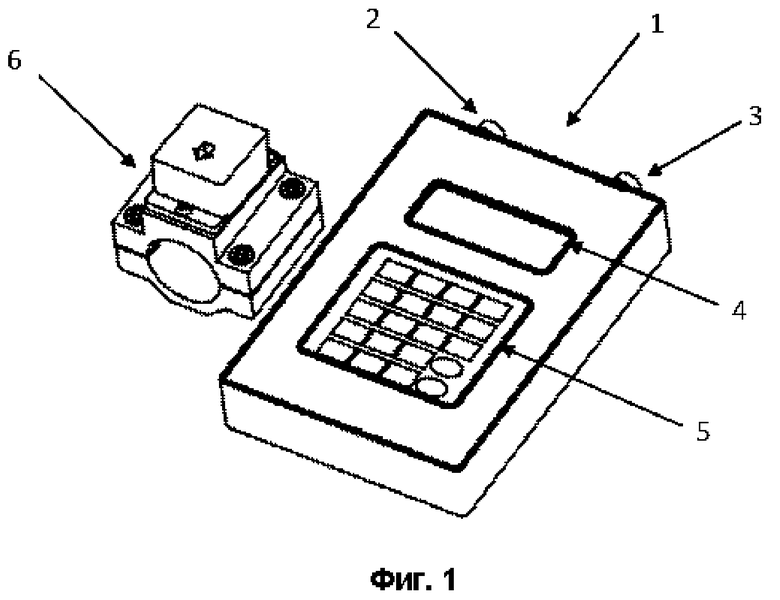
1. Устройство автоматизации позиционирования для малых антенных систем, содержащее дисплей, клавиатуру, модуль ГНСС (глобальной навигационной спутниковой системы), внутреннюю память, позиционер/процессор и источник питания, выполненные в едином корпусе, при этом клавиатура, модуль ГНСС подключены напрямую к позиционеру/процессору, который выводит информацию на дисплей, и все элементы устройства подключены к одному внутреннему источнику питания,
отличающееся тем, что на корпусе устройства имеется внешний разъем, к которому подключены выполненные как единое целое и с возможностью крепления на антенной системе трехосевой компас с компенсацией угла наклона и датчик уровня принимаемого сигнала.
2. Устройство по п. 1, отличающееся тем, что выполнено с возможностью наводить на спутник-ретранслятор последовательно неограниченное количество немоторизованных малых антенных систем.
3. Устройство по п. 1, отличающееся тем, что на корпусе предусмотрен второй разъем для подключения внешнего источника питания.
4. Устройство по п. 4, отличающееся тем, что внутренний источник питания представляет собой аккумуляторную батарею и выполнен с возможностью зарядки от внешнего источника питания.
5. Устройство по п. 4 или 5, отличающееся тем, что разъем для подключения внешнего источника питания представляет собой USB-разъем.
6. Устройство по п. 1, отличающееся тем, что модуль ГНСС представляет собой модуль GPS, и/или ГЛОНАСС, и/или Galileo, и/или Beidou.
7. Устройство по п. 1, отличающееся тем, что оно выполнено в пылевлагозащитном исполнении.
| 0 |
|
SU193423A1 | |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ АНТЕННЫ | 2015 |
|
RU2610519C1 |
| CN 107425285 A, 01.12.2017 | |||
| US 2012068899 A1, 22.03.2012. | |||

