Настоящее изобретение относится к области радиолокации, в частности к радиолокационным средствам автоматического обнаружения, распознавания и сопровождения различных типов подвижных объектов (людей, наземного и водного транспорта, низколетящих малоразмерных целей и др.) в любое время суток и времени года, в том числе в условиях отсутствия оптической видимости, таких как запыленность и задымленность атмосферы, туман, осадки и т.п. и представляет собой переносную когерентную доплеровскую радиолокационную станцию непрерывного излучения с цифровой фазированной антенной решеткой.
Предлагаемая переносная радиолокационная станция разведки наземных движущихся целей с цифровой фазированной антенной решеткой может автономно использоваться как средство радиолокационного кругового наблюдения за охраняемым сухопутным или водным участком местности (границы, стратегические объекты, гидроэлектростанции, аэродромы и пр.) на дальностях до 20 км, а также в качестве радиолокационного датчика в составе систем охраны с сетевой архитектурой построения.
Известна переносная РЛС, которая содержит антенный пост и связанное с антенным постом опорно-поворотное устройство, выполненное с возможностью закрепления на штативе. Антенный пост соединен кабельной сетью с блоком электропитания и рабочим местом оператора, представляющим собой геоинформационную систему, сопряженную с встроенной в станцию системой спутниковой навигации (RU 88815, опубл. 20.11.2009). Переносная РЛС предназначена для слежения за наземными и/или надводными объектами с максимальной дальностью обнаружения объекта типа грузовой автомобиль до 13 км.
Недостатком РЛС является отсутствие автоматического обнаружения и сопровождения воздушных целей (парашютисты, планеристы, беспилотные летательные аппараты), автоматического распознавания типа цели (техника-человек) за время прохода диаграммы направленности антенны по цели, кругового или секторного обзора пространства, отображения радиолокационной и видеоинформации на едином дисплее любой персональной электронной вычислительной машины (ПЭВМ), работы в охранных системах с сетевой архитектурой.
Наиболее близким аналогом (прототипом) заявленного изобретения является радиолокационная станция охраны объектов «Сова» (RU 2669 383, опубл. 11.10.2018. Бюл. № 29). Радиолокационная станция охраны объектов «Сова» (РЛС «Сова»), содержащая двухкоординатное опорно-поворотное устройство, выполненное с возможностью крепления на треноге, сетевой блок питания, приемопередающее устройство, выполненное в едином корпусе и содержащее волноводно-щелевые приемную и передающую антенны, приемопередающий блок, обеспечивающий непрерывную генерацию зондирующего сигнала с линейной частотной модуляцией (ЛЧМ), блок первичной обработки информации, вычислительное устройство, вторичный источник питания, а также содержит с возможностью демонтажа приемник GPS/ГЛОНАСС, антенну приемника GPS/ГЛОНАСС, малогабаритный оптико-электронный прибор и модуль видеозахвата, выполненный с возможностью приема аналогового сигнала от малогабаритного оптико-электронного прибора, оцифровки, обработки аналогового видеосигнала и его передачи на вычислительное устройство, при этом блок первичной обработки информации содержит дополнительный информационный выход, а вычислительное устройство дополнительно содержит информационный вход, образующие звуковой канал, вычислительное устройство выполнено на одноплатной ЭВМ и обеспечивает возможность выполнения функций управления, вторичной обработки радиолокационных и оптических данных, формирования пакета данных об обнаруженных целях на дальностях до 20 км и последующего обмена данными со средством управления и индикации по проводному интерфейсу Ethernet, сетевому протоколу TCP/IP или беспроводному каналу Wi-Fi, опорно-поворотное устройство соединено с приемопередающим устройством с помощью кабеля и выполнено с возможностью автоматического сканирования приемопередающего устройства по азимуту и углу места, а также перехода в режим предварительного подогрева при рабочей температуре ниже минус 10°С, сетевой блок питания соединен кабелем с опорно-поворотным устройством, кабель управления соединяет опорно-поворотное устройство со средством управления и индикации. Корпус приемопередающего устройства выполнен герметичным из высокопрочного алюминиевого сплава, передней стенкой которого является антенный блок, защищенный от внешних воздействий радиопрозрачным полотном. На углах корпуса установлены упоры, на противоположных сторонах верхней части корпуса выполнены два симметричных отсека под размещение антенн навигационной аппаратуры, сверху отсеки закрыты герметичными радиопрозрачными крышками. Радиолокационная станция дополнительно содержит треногу для установки на нее двухкоординатного опорно-поворотного устройства, где тренога содержит алюминиевый штатив и узел ориентирования и горизонтирования. Узел ориентирования и горизонтирования установлен на плоской площадке штатива с возможностью крепления посредством рукоятки. Верхняя часть узла снабжена пузырьковым уровнем для контроля горизонтального положения приемопередающего устройства.
Недостатками РЛС «Сова» является обеспечение сканирования, сопровождения и измерение координат целей посредством электромеханического привода и однолучевой диаграммы направленности антенны, что приводит к низкой скорости обзора 7 град/с, малому количеству одновременно сопровождаемых целей, низкой точности измерения азимутальных координат целей (из-за однолучевого последовательного измерения угловых координат), низкой надежности (так как сектор сканирования обеспечивается только за счет электро-механического привода).
Для обеспечения высокой скорости обзора пространства и земной поверхности в бортовых и возимых РЛС используются цифровые фазированные антенные решетки. Применение в переносных РЛС разведки наземных движущихся целей технологии цифровых фазированных антенных решеток (ЦФАР) позволит существенно улучшить технические характеристики переносных РЛС.
Технический результат предлагаемого изобретения - обеспечение увеличения скорости обзора сектора сканирования, количества одновременно сопровождаемых целей, точности измерения азимутальных координат целей и повышение надежности переносной РЛС разведки наземных движущихся целей с ЦФАР.
Указанный технический результат обеспечивается следующей совокупностью признаков.
Переносная РЛС разведки наземных движущихся целей с ЦФАР (переносная РЛС РНДЦ с ЦФАР) содержит приемопередающее устройство, размещенное на двухкоординатном опорно-поворотном устройстве, которое закреплено на узле ориентирования и горизонтирования, установленном на треноге с помощью рукоятки, пульт управления и отображения информации и сетевой блок питания.
Приемопередающее устройство содержит:
- две разнесенные в пространстве передающие антенны сантиметрового диапазона (для режима MIMO (MultiInput/MultiOutput)), излучающие два независимых зондирующих частотно модулированных сигнала;
- приемную 32-канальную антенную решетку сантиметрового диапазона;
- приемную систему, состоящую из четырех идентичных приемников восьмиканальных;
- формирователь сигналов синхронизации, сигнала гетеродина и зондирующего сигнала;
- два сверхвысокой частоты усилителя мощности;
- систему первичной обработки информации;
- блок управления и интерфейса;
- блок вторичных источников питания.
Двухкоординатное опорно-поворотное устройство соединено кабелем с приемопередающим устройством и обеспечивает его автоматическое сканирование по азимуту и углу места с возможностью поворота в горизонтальной плоскости без ограничения, а в вертикальной плоскости - от плюс 45 до минус 90 градусов.
Пульт управления и отображения информации соединен кабелем управления с двухкоординатным опорно-поворотным устройством и обеспечивает управление переносной РЛС РНДЦ с ЦФАР.
Сетевой блок питания с помощью кабеля подключен к двухкоординатному опорно-поворотному устройству и обеспечивает питание для 1111У и ДОПУ от промышленной сети.
Узел ориентирования и горизонтирования, установленный на треноге в виде алюминиевого штатива, с помощью рукоятки и невыпадающего винтового зажима, позволяет быстро и надежно выполнять сборку-разборку переносной РЛС РНДЦ с ЦФАР без использования крепежных изделий.
Составные части РЛС РНДЦ с ЦФАР упаковываются во вьюки (любого варианта исполнения) для переноски двумя операторами.
Применение стандартного интерфейса Ethernet с протоколом TCP/IP позволяет интегрировать переносную РЛС РНДЦ с ЦФАР в общую, в том числе охранную, систему с сетевой архитектурой.
Описание конструкции переносной РЛС РНДЦ с ЦФАР поясняется рисунками, где:
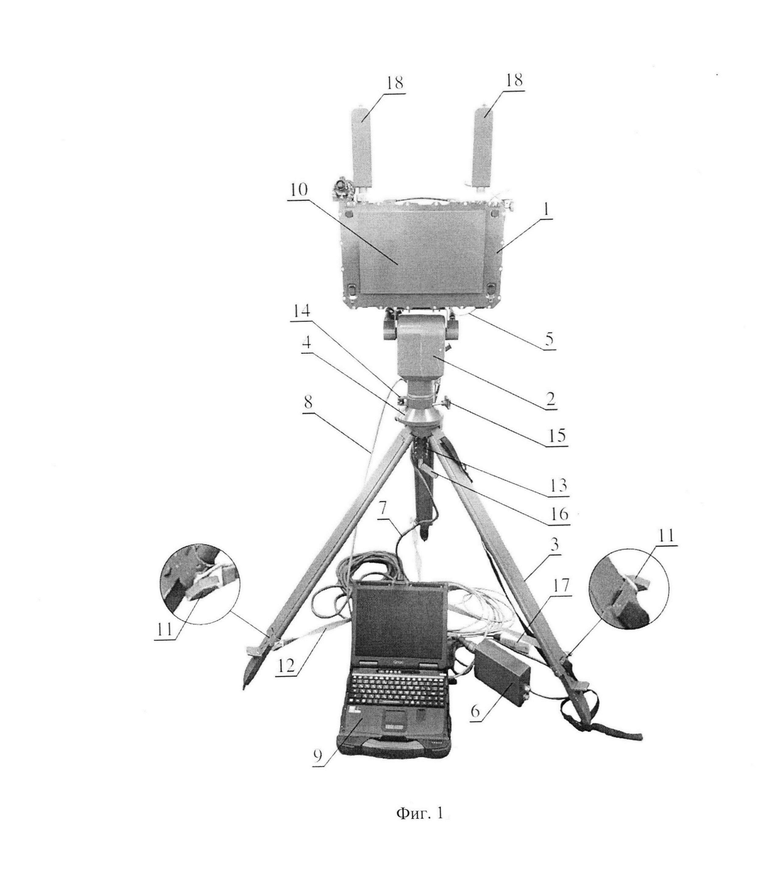
на фиг. 1 изображена переносная РЛС РНДЦ с ЦФАР в рабочем положении (вид спереди);
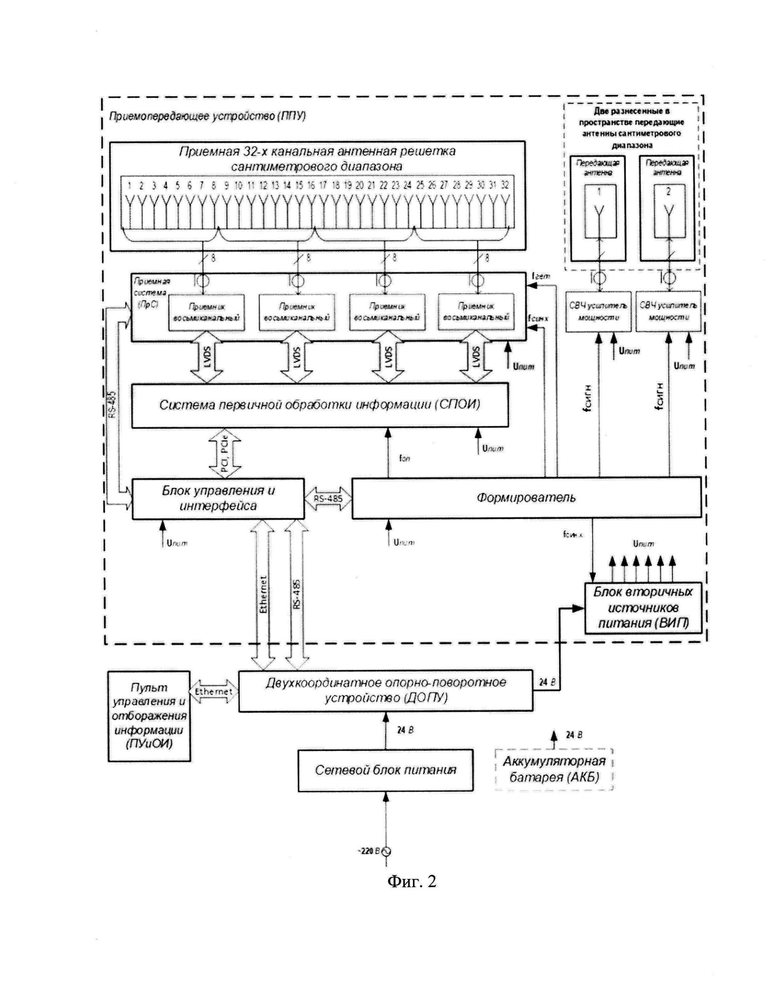
на фиг. 2 представлена структурная схема переносной РЛС РНДЦ с ЦФАР;
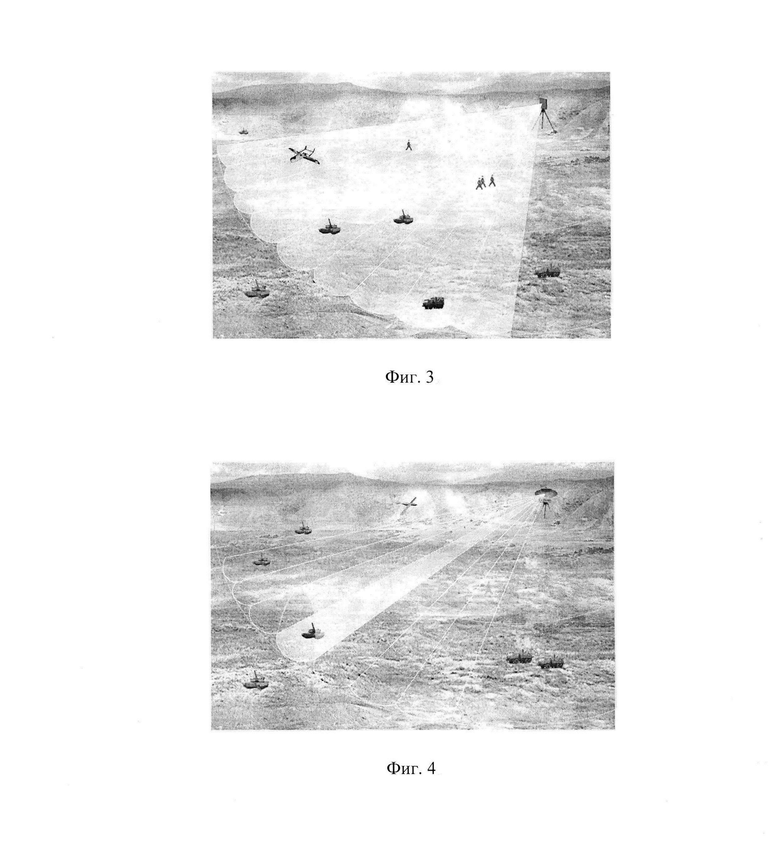
- на фиг. 3 представлена схема мгновенного обзора пространства переносной РЛС РНДЦ с ЦФАР;
- на фиг. 4 представлена схема последовательного обзора пространства прототипом.
Изображенная на фиг. 1 переносная РЛС РНДЦ с ЦФАР состоит из следующих функционально законченных частей: приемопередающее устройство (ППУ) 1, двухкоординатное опорно-поворотное устройство (ДОПУ) 2, тренога 3, узел ориентирования и горизонтирования 4, пульт управления и отображения информации (ПУиОИ) 9, сетевой блок питания 6, кабель управления 8.
ППУ 1 с размещенными на нем двумя разнесенными в пространстве передающими антеннами сантиметрового диапазона 18 установлено на ДОПУ 2, закрепленное на треноге 3 посредством узла ориентирования и горизонтирования 4. Электрическое соединение между ППУ 1 и ДОПУ 2 выполнено кабелем 5. Сетевой блок питания 6 соединен кабелем 7 с ДОПУ 2, кабель управления 8 соединяет ДОПУ 2 с ПУиОИ 9.
Опционно переносная РЛС РНДЦ с ЦФАР может быть размещена без треноги 3 на зданиях, вышках, опорах и т.п. с помощью универсального кронштейна (не показан).
Описание и работа составных частей переносной РЛС РНДЦ с ЦФАР.
1. ППУ 1
ППУ 1 является основной составной частью переносной РЛС РНДЦ с ЦФАР. Конструктивно ППУ 1 представляет собой герметичный корпус из высокопрочного алюминиевого сплава, передней стенкой которого является приемная 32-канальная антенная решетка сантиметрового диапазона, защищенная от внешних воздействий радиопрозрачным полотном 10. На корпусе размещены две разнесенные в пространстве передающие антенны сантиметрового диапазона 18. Электрические связи осуществляются через герметичный разъем, расположенный на нижней стенке корпуса ППУ 1. Форма корпуса ППУ 1 обеспечивает высокую механическую прочность, эффективный теплоотвод и возможность применения высокоточных методов механической обработки при изготовлении.
2. ДОПУ 2
ДОПУ 2 позволяет размещать ППУ 1, массой до 20 кг с возможностью поворота в горизонтальной плоскости без ограничения, в вертикальной плоскости - от плюс 45 до минус 90 градусов.
3. Тренога 3
Тренога 3 представляет собой алюминиевый штатив, выдвижные секции которого зафиксированы зажимными винтами 11. К винтам опционно может крепиться стяжка 12 для фиксации опор треноги 3 в определенном угловом положении. Тренога 3 может быть укомплектована ремнем для переноски (не показан).
4. Узел ориентирования и горизонтирования 4
Узел ориентирования и горизонтирования 4 установлен на плоской площадке треноги 3 и надежно закрепляется без использования крепежных изделий посредством рукоятки 13. Рукоятка 13 имеет глубокую рельефную насечку, которая облегчает работу в зимних условиях. Верхняя часть узла ориентирования и горизонтирования 4 снабжена пузырьковым уровнем 14 для контроля горизонтального положения ППУ 1 и невыпадающим винтовым зажимом 15 крепления ДОПУ 2 в любом положении относительно горизонтальной плоскости. Пузырьковый уровень 14 закреплен на кронштейне, защищающем от механических повреждений. Для перевода ППУ 1 в горизонтальное положение, с контролем по пузырьковому уровню 14, в корпусе узла ориентирования и горизонтирования 4 установлен винтовой зажим с «ломающейся» рукояткой 16. Конструкция «ломающейся» рукоятки 16 надежно фиксирует горизонтальное положение ППУ 1.
Узел ориентирования и горизонтирования 4 позволяет быстро и надежно выполнять сборку-разборку переносной РЛС РНДЦ с ЦФАР. Составные части РЛС РНДЦ с ЦФАР упаковываются во вьюки (любого варианта исполнения, не показаны) для переноски двумя операторами.
Детали узла ориентирования и горизонтирования 4 выполнены из высококачественных материалов: нержавеющей стали и коррозионностойких алюминиевых сплавов.
5. ПУиОИ 9
В качестве ПУиОИ 9 может использоваться любая внешняя ПЭВМ. В изобретении рассматривается ПЭВМ типа ноутбук, которая может работать от встроенных источников электропитания, а также от промышленной сети 220 В, 50 Гц.
6. Сетевой блок питания 6
Сетевой блок питания 6 заключен в герметичный корпус с крышкой для доступа к внутреннему монтажу и обеспечивает питание для ППУ и ДОПУ от промышленной сети.
На торцевых поверхностях корпуса сетевого блока питания 6 установлены гермовводы с выходящими через них кабелями. Кабели заканчиваются: с одной стороны сетевой вилкой электропитания 17, с другой - разъемом, смонтированном на кабеле 7. Для работы в полевых условиях сетевой блок питания 6 может быть заменен аккумуляторной батареей (не показана).
7. Кабель управления 8
Кабель управления 8 выполнен длиной до 100 м (для работы переносной РЛС РНДЦ с ЦФАР в стационарном варианте). Кабель заканчивается герметичными разъемами для соединения с ДОПУ 2 и с ПУиОИ 9.
Структурная схема переносной РЛС РНДЦ с ЦФАР представлена на фиг. 2.
Формирователь ППУ обеспечивает формирование двух независимых зондирующих частотно модулированных (ЧМ) сигналов сантиметрового диапазона fcигн для двух сверхвысокой частоты (СВЧ) усилителей мощности для двух разнесенных в пространстве передающих антенн сантиметрового диапазона, сигнала гетеродина fгет для приемной системы (ПрС) с целью обеспечения гомодинного приема, сигналов синхронизации fсинх для ПрС и блока вторичных источников питания (ВИЛ), опорный сигнал fon для обеспечения синхронной обработки информации в СПОИ. Для формирования всех сигналов используется опорный кварцевый генератор. Зондирующий ЧМ сигнал fсигн формируется на промежуточной частоте с помощью цифрового вычислительного синтезатора (DDS), а затем переносится на рабочую частоту. Количество ЧМ сигналов fсигн определяется режимом работы (SIMO (SingleInput/MultiOutput), MIMO). Программируемая логическая интегральная схема (ПЛИС) из состава формирователя обеспечивает управление микросхемами DDS и формирователем в целом по командам поступающим от блока управления и интерфейса по каналу RS-485. Также ПЛИС обеспечивает генерацию низкочастотных сигналов синхронизации fcинх для блока ВИЛ и цифровых интерфейсов ППУ путем деления частоты опорного кварцевого генератора.
СВЧ усилители мощности обеспечивают усиление зондирующих ЧМ сигналов fсигн формирователя и их передачу в две разнесенные в пространстве передающие антенны сантиметрового диапазона для режима MIMO (MultiInput/MultiOutput)), которые обеспечивают дополнительно сужение в два раза диаграммы направленности антенны на прием, по сравнению с шириной диаграммы направленности, обеспечиваемой приемной антенной при излучении одной передающей антенной.
Отраженный радиолокационный сигнал принимается приемной 32-канальной антенной решеткой сантиметрового диапазона, состоящей из 32-х приемных антенн, каждая из которых обеспечивает ширину диаграммы направленности 90° в азимутальной плоскости и 6° в угломестной плоскости.
Приемная система (ПрС) осуществляет оцифровку СВЧ сигналов, поступающих с приемной 32-канальной антенной решетки сантиметрового диапазона, и состоит из четырех идентичных приемников восьмиканальных гомодинного типа с двухканальными аналого-цифровыми преобразователями (АЦП) в интегральном исполнении.
Имеющаяся в составе приемника восьмиканального ПЛИС обеспечивает распределение сигналов синхронизации АЦП и выходном интерфейсе LVDS для системы первичной обработки информации (СПОИ). Также ПЛИС осуществляет управление приемником восьмиканальным в соответствии с командами поступающим от блока управления и интерфейса по каналу RS-485.
От формирователя на вход ПрС поступает сигнал гетеродина 
Оцифрованные сигналы передаются по LVDS линии передачи на СПОИ.
СПОИ обеспечивает прием 32-х цифровых квадратурных сигналов от ПрС и их обработку - цифровое диаграммообразование (формирование 64-х независимых обуженных диаграмм направленности антенны по азимуту на прием в режиме MIMO с шириной 1,8 градуса, 32-х в режиме SIMO с шириной 3,6 градусов в секторе 90 градусов), а также сжатие ЧМ сигнала по дальности, доплеровскую обработку, фильтрацию и обнаружение движущихся целей. Ввиду большой вычислительной нагрузки СПОИ включает в себя высокопроизводительную ПЛИС и оперативное запоминающее устройство большого объема. Результаты обработки передаются в блок управления и интерфейса по высокоскоростному интерфейсу (PCI, PCIe). По этому же интерфейсу осуществляется управление работой СПОИ.
Блок управления и интерфейса осуществляет настройку СПОИ, прием от него данных об обнаруженных целях, формирование выходных кодограмм, включающих текущий статус приемной РЛС РНДЦ с ЦФАР и данные функционального контроля, и отправку выходных кодограмм по проводному интерфейсу (Ethernet) на ПУиОИ (через двухкоординатное опорно-поворотное устройство (ДОПУ)) или опционно по беспроводному интерфейсу (WiFi) на ПУиОИ. По командам от ПУиОИ блок управления и интерфейса осуществляет управление ППУ и ДОПУ. Блок ВИЛ осуществляет синхронное (по сигналам от формирователя) формирование гальванически развязанных от входа напряжений питания Unun, необходимых составным частям ППУ переносной РЛС РНДЦ с ЦФАР.
ПУиОИ обеспечивает:
- вторичную обработку данных, в частности отображение координат целей в секторе обзора с привязкой к электронной карте местности, обеспечение траекторной обработки, автоматическое распознавание по доплеровскому сигналу одновременно нескольких целей в секторе обзора, вывод звукового сигнала и отображения на цветном ЖК-дисплее радиолокационной информации, цифровой карты местности, данных о текущем статусе переносной РЛС РНДЦ с ЦФАР и функциональном контроле;
- управление режимами работы переносной РЛС РНДЦ с ЦФАР;
- интеграцию переносной РЛС РНДЦ с ЦФАР в общую, в том числе охранную, систему с сетевой архитектурой посредством стандартного интерфейса Ethernet с протоколом TCP/IP.
Электропитание ППУ и ДОПУ из состава переносной РЛС РНДЦ с ЦФАР осуществляется от сети переменного тока напряжением 220 В, 50 Гц через сетевой блок питания. Сетевой блок питания фильтрует и преобразует первичное напряжение в постоянное напряжение номиналом 24 В. В переносной РЛС РНДЦ с ЦФАР опционно предусмотрена возможность работы от штатной герметичной литий-ионной аккумуляторной батареи номинальным напряжением 24 В. При подаче электропитания блок ВИЛ (из состава ППУ) формирует все необходимые вторичные напряжения.
Применение в заявленной переносной РЛС РНДЦ с ЦФАР ППУ, функционирующего в режиме MIMO, обеспечивается практически мгновенный обзор в секторе 90 град за 0,15 с в азимутальной плоскости за счет многолучевого обзора, реализуемого переносной РЛС РНДЦ с ЦФАР (обеспечивается приемной системой и СПОИ, формирующих цифровым способом многолучевую диаграмму направленности антенны), что актуально при решении задач одновременного обнаружения, сопровождения, измерения координат и автоматического распознавания нескольких движущихся наземных целей (люди, техника).
Пропускная способность переносной РЛС РНДЦ с ЦФАР увеличивается в количество лучей раз (фиг. 3) по сравнению с пропускной способностью прототипа, имеющего один луч (фиг. 4).
За счет комплексирования переносной РЛС РНДЦ с ЦФАР с ДОПУ обеспечивается:
- обзор сектора по азимуту 360 град (с учетом времени переброса 1,5 с на каждые 90 град) за время 5,1 с, в то время как прототип осуществляет последовательный обзор в секторе 90 град за 12,86 с, а обзор сектора 360 град за 51,4 с (скорость обзора опорно-поворотного устройства прототипа 7 градусов в секунду);
- быстрый и недорогой 3-координатный обзор пространства (по азимуту, по углу места и дальности), что актуально при решении задачи обнаружения беспилотных летательных аппаратов.
Увеличение точности измерения угловых азимутальных координат целей переносной РЛС РНДЦ с ЦФАР достигается за счет:
- цифрового диаграммообразования, обеспечивающего одновременное формирование многолучевой диаграммы направленности на прием, что позволяет реализовать высокоточные алгоритмы моноимпульсного измерения азимутальных координат;
- синтезирования цифровым методом диаграммы направленности антенны с минимальными погрешностями и возможности ее юстировки в зависимости от условий работы переносной РЛС РНДЦ с ЦФАР;
- облучения переносной РЛС РНДЦ с ЦФАР пространства двумя разнесенными в пространстве передающими антеннами сантиметрового диапазона и совместной обработкой соответствующих сигналов приемной 32-канальной антенной решеткой сантиметрового диапазона на прием в СПОИ, что обеспечивает формирование эквивалентной 64-х канальной антенной решетки, имеющей в два раза большую апертуру, а, следовательно, вдвое лучшей разрешающей способностью по азимуту.
Повышение надежности переносной РЛС РНДЦ с ЦФАР достигается архитектурой ее построения. Наличие двух передающих каналов, в каждый из которых входит СВЧ усилитель мощности и одна из двух разнесенных в пространстве передающих антенн сантиметрового диапазона, обеспечивает увеличение надежности переносной РЛС РНДЦ с ЦФАР, так как выход из строя одного СВЧ усилителя мощности и одной передающей антенны сантиметрового диапазона одного передающего канала не приводит к выходу из строя всей переносной РЛС РНДЦ с ЦФАР по сравнению с прототипом. Приемная 32-канальная антенная решетка сантиметрового диапазона и ПрС (имеющая в своем составе четыре приемника восьмиканальных) также обеспечивают повышение надежности переносной РЛС РНДЦ с ЦФАР, поскольку выход из строя по одному любому каналу каждого из четырех приемников и/или канала антенной решетки сантиметрового диапазона не приведет к существенному снижению основных характеристик переносной РЛС РНДЦ с ЦФАР.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА | 2023 |
|
RU2817396C1 |
| Радиолокационная станция охраны объектов "Сова" | 2017 |
|
RU2669383C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ САМОНАВОДЯЩЕГОСЯ ОРУЖИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2794223C1 |
| ПЕРЕНОСНАЯ МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СЕКТОРНОГО ОБЗОРА ПРОСТРАНСТВА | 2024 |
|
RU2832851C1 |
| МНОГОДИАПАЗОННЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2346291C2 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
Изобретение относится к области радиолокации. Технический результат - обеспечение увеличения скорости обзора сектора сканирования, количества одновременно сопровождаемых целей, точности измерения азимутальных координат целей и повышения надежности переносной радиолокационной станции разведки наземных движущихся целей с цифровой фазированной антенной решеткой. Такой результат обеспечивается за счет того, что переносная радиолокационная станция содержит приемопередающее устройство, размещенное на двухкоординатном опорно-поворотном устройстве, которое закреплено на узле ориентирования и горизонтирования, при этом опорно-поворотное устройство соединено с приемопередающим устройством и обеспечивает его автоматическое сканирование по азимуту и углу места, причем приемопередающее устройство содержит приемную 32-канальную антенную решетку сантиметрового диапазона, две разнесенные в пространстве передающие антенны, излучающие два независимых частотно-модулированных сигнала, приемную систему, состоящую из четырех восьмиканальных приемников, формирователя сигнала синхронизации, сигнала гетеродина и зондирующего сигнала, два сверхвысокой частоты усилителя мощности, систему первичной обработки информации, блок управления и интерфейса и блок вторичных источников питания. 4 ил.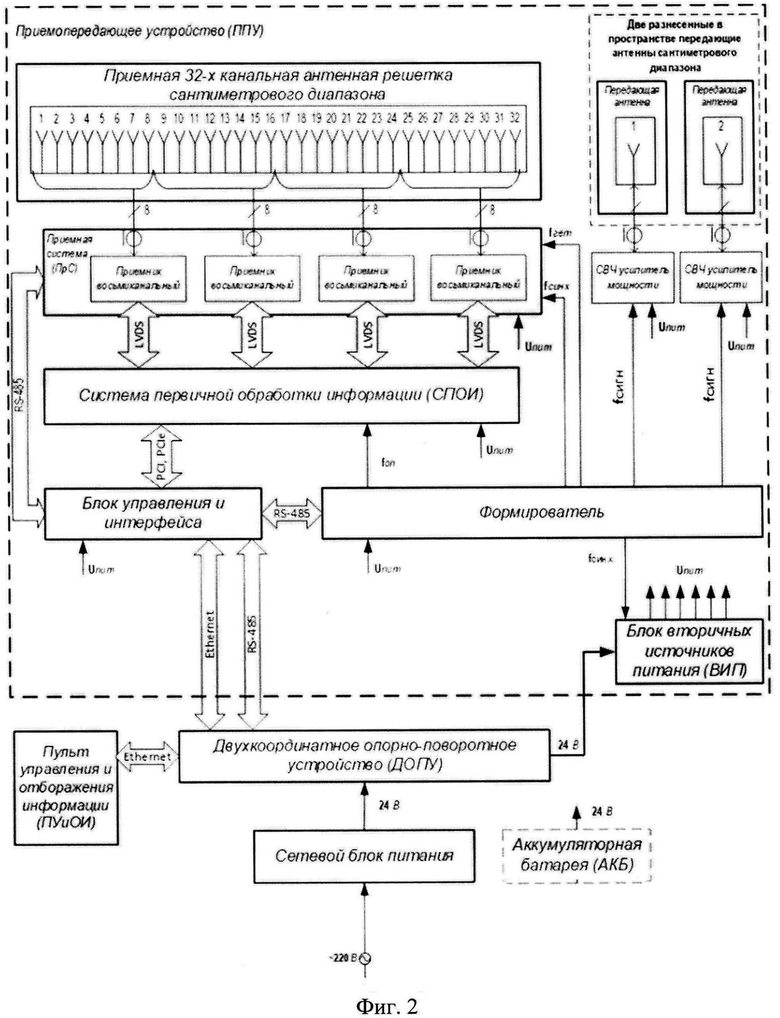
Переносная радиолокационная станция разведки наземных движущихся целей с цифровой фазированной антенной решеткой, содержащая приемопередающее устройство, размещенное на двухкоординатном опорно-поворотном устройстве, которое закреплено на узле ориентирования и горизонтирования, установленном на треноге с помощью рукоятки, пульт управления и отображения информации и сетевой блок питания, при этом двухкоординатное опорно-поворотное устройство соединено кабелем с приемопередающим устройством и обеспечивает его автоматическое сканирование по азимуту и углу места, кабель управления соединяет двухкоординатное опорно-поворотное устройство с пультом управления и отображения информации, а сетевой блок питания соединен кабелем с двухкоординатным опорно-поворотным устройством, отличающаяся тем, что приемопередающее устройство содержит приемную 32-канальную антенную решетку сантиметрового диапазона, две разнесенные в пространстве передающие антенны сантиметрового диапазона, излучающие два независимых зондирующих частотно-модулированных сигнала, приемную систему, состоящую из четырех идентичных приемников восьмиканальных, формирователь сигналов синхронизации, сигнала гетеродина и зондирующего сигнала, два сверхвысокой частоты усилителя мощности, систему первичной обработки информации, блок управления и интерфейса и блок вторичных источников питания, при этом антенная решетка соединена с приемной системой, приемная система соединена с системой первичной обработки информации, формирователь сигналов синхронизации, сигнала гетеродина и зондирующего сигнала соединен с приемной системой, с системой первичной обработки информации, с блоком управления и интерфейса, а также с двумя сверхвысокой частоты усилителями мощности, которые соединены с двумя передающими антеннами, блок управления и интерфейса соединен с приемной системой, с системой первичной обработки информации и с двухкоординатным опорно-поворотным устройством, а блок вторичных источников питания соединен с формирователем сигналов синхронизации, сигнала гетеродина и зондирующего сигнала, с двумя сверхвысокой частоты усилителями мощности, с блоком управления и интерфейса, с системой первичной обработки информации, с приемной системой и с двухкоординатным опорно-поворотным устройством.
| Радиолокационная станция охраны объектов "Сова" | 2017 |
|
RU2669383C1 |
| Мусоропровод | 1950 |
|
SU87267A1 |
| Ламельный основонаблюдатель к ткацким станкам | 1959 |
|
SU127200A1 |
| CN 110542896 A, 06.12.2019 | |||
| US 7248210 B2, 24.07.2007. | |||

