Предлагаемое изобретение относится к области машиностроения, и в частности, к способам проектирования и изготовления спиральных гравитационных транспортеров, выполняющих функции накопительных и загрузочных устройств в поточных и автоматических линиях.
Такие транспортеры обычно содержат вертикальную колонну, закрепляемую на опоре, и жёлоб, закрепляемый на колонне. Установка жёлоба на колонне – непременный элемент изготовления гравитационного транспортера, и в настоящее время способы указанной установки известны.
К ним относятся, например, описанные в книге А.Н. Малов. «Загрузочные устройства для металлорежущих станков. М.: Машиностроение, 1965 г.» на стр. 11–12 и проиллюстрированные рис. 4д, 4е, 4з. Эти способы, аналогичные предлагаемому, состоят, прежде всего в том, что жёлобу придают спирально–овальную или зигзагообразную форму, а затем его закрепляют на колонне. Достоинством таких способов является то, что транспортеры, построенные с их применением, имеют большую емкость, чем транспортеры с прямолинейными желобами, и занимают меньшие производственные площади. К их недостаткам следует отнести получение все же не всегда достаточной емкости транспортера и нерациональное использование поверхности колонны.
Отмеченных недостатков в значительной степени лишен способ установки желоба на колонне, состоящий в придании желобу винтовой формы с последующим его закреплением вокруг колонны (см. упомянутую выше книгу, рис. 4в, 4г). Поверхность колонны в этом случае используется более рационально, емкость транспортера увеличивается, но его быстродействие оставляет желать лучшего. Причина в том, что винтовой желоб имеет постоянный шаг и время движения объекта транспортирования по нему не минимально. Проблемой, на разрешение которой направлено предлагаемое изобретение и является указанное.
Разрешение проблемы основано на том, что в результате применения предлагаемого способа получается транспортер, жёлоб которого представляет собой спираль с переменным, последовательно уменьшающимся шагом. Траектория движения объекта транспортирования по жёлобу приобретает форму винтовой кривой скорейшего спуска. Линейные такие кривые (брахистохроны) известны, но как установить на колонне желоб, чтобы получилась винтовая брахистохрона, в доступной автору предложения литературе упоминаний нет.
В соответствии с изложенным, технически решение сформулированной выше проблемы состоит в том, что способ установки желоба на колонне спирального гравитационного транспортера характеризуется тем, что выбирают i-е поперечные сечения желоба, одну из точек линии пересечения поверхности колонны с плоскостью ее опоры принимают за начало окружной X и вертикальной У координат транспортера, затем на поверхности колонны изображают вертикальные линии, соединяющие i-е сечения желоба с плоскостью опоры колонны и отстоящие от начала координат по окружности колонны на расстояниях Xi, на линиях откладывают отрезки длиной Уi, отсчитываемые от линии пересечения поверхности колонны с плоскостью ее опоры, после чего желоб каждого i-го сечения закрепляют бортом на колонне в точке с координатами Xi и Уi, при этом числовые значения последних определяют по соотношению
 ,
,
где i = 0, 1, 2, 3…- порядковый номер сечения жёлоба;
L - высота колонны транспортера, метры;
r - радиус колонны, доли метра;
l - единица измерения длины проекции жёлоба на координату X, такая, что l≥2πr, метры;
Xi = 0, …, l/πr - расстояние от начала координат транспортера, выраженное количеством отрезков длиной 2πr/l, таких, что Xi+1> Xi.
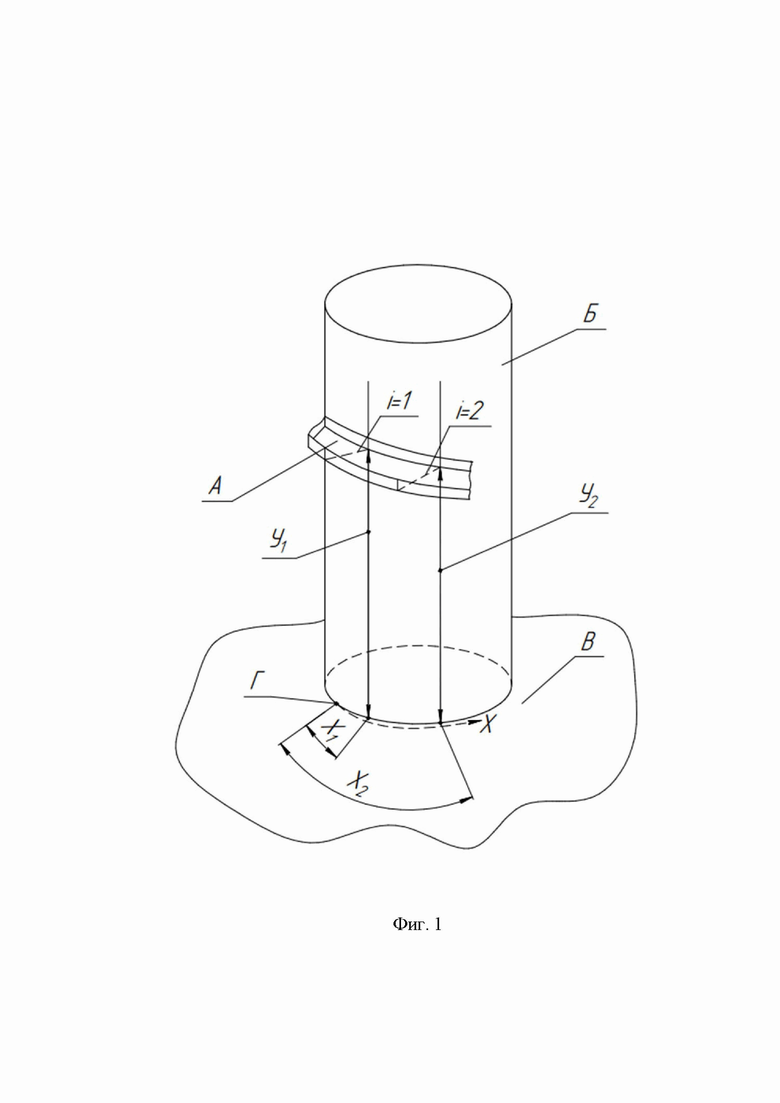
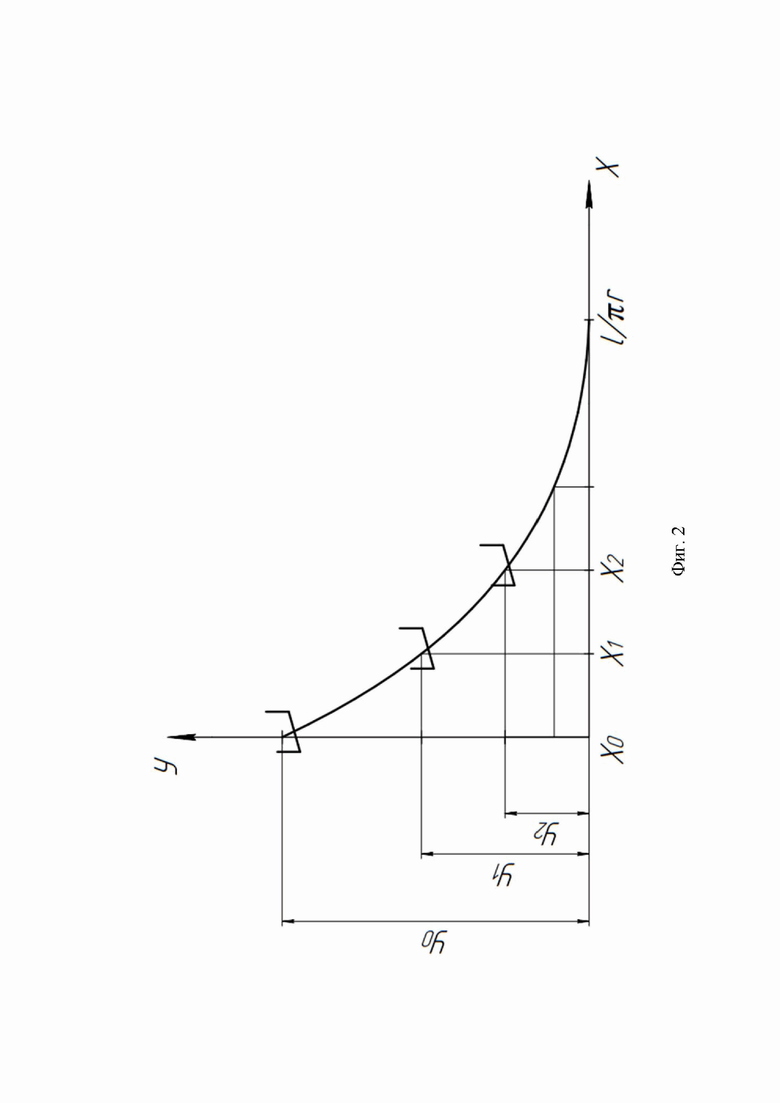
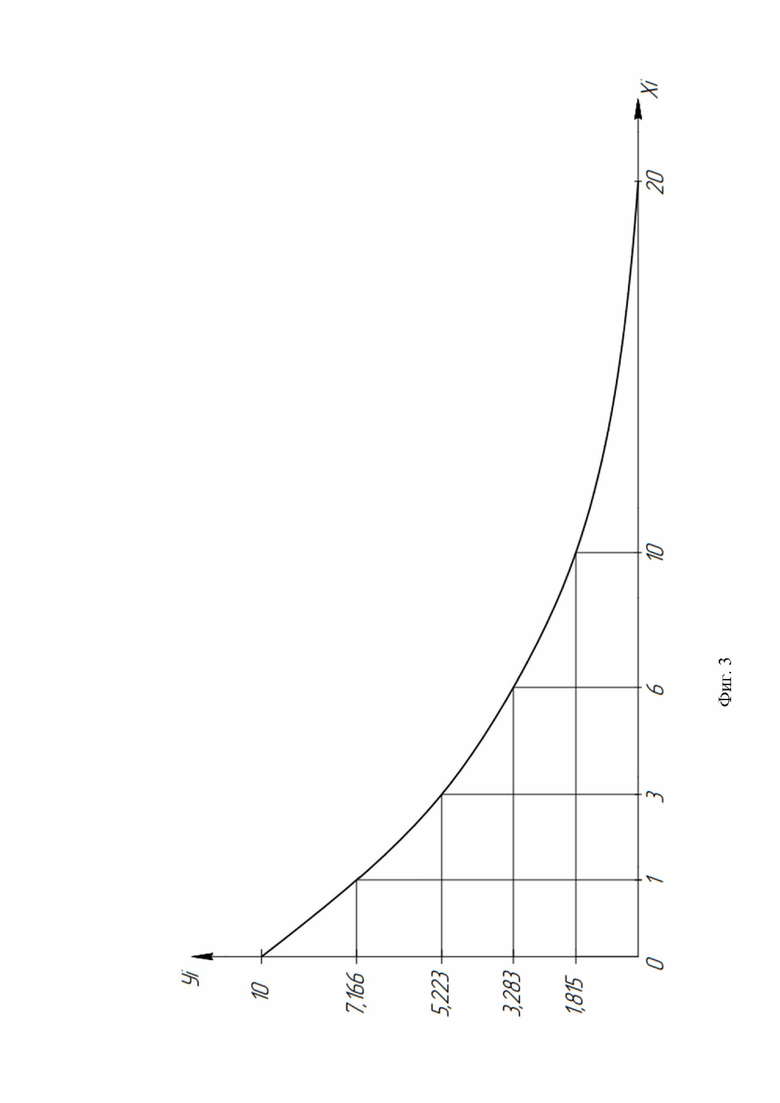
На фиг.1 изображен фрагмент желоба, устанавливаемого на колонне предлагаемым способом; на фиг.2 – схема развертки желоба, устанавливаемого на колонне, в координатах X (охватывающей колонну кругами по окружности пересечения поверхности колонны с плоскостью ее опоры) и У (направленной по вертикали параллельно оси колонны); на фиг.3 – пример, иллюстрирующий использование способа.
Предлагаемый способ установки желоба А на колонне Б спирального гравитационного транспортера, характеризуется тем, что выбирают i-е поперечные сечения желоба А, одну из точек линии пересечения линия поверхности колонны с плоскостью ее опоры В принимают за начало окружной X и вертикальной У координат транспортера Г, затем на поверхности колонны Б изображают вертикальные линии, соединяющие i-е сечения желоба с плоскостью опоры В колонны и отстоящие от начала координат Г по окружности колонны на расстояниях Xi на линиях откладывают отрезки длиной Уi, отсчитываемые от линии пересечения поверхности колонны с плоскостью ее опоры, после чего желоб каждого i-го сечения закрепляют бортом на колонне в точке с координатами Xi и Уi, при этом числовые значения последних определяют по соотношению
,
где i = 0, 1, 2, 3…- порядковый номер сечения жёлоба;
L - высота колонны транспортера, метры;
r - радиус колонны, доли метра;
l - единица измерения длины проекции жёлоба на координату X, такая, что l≥2πr, метры;
Xi = 0, …, l/πr - расстояние от начала координат транспортера, выраженное количеством отрезков длиной 2πr/l, таких, что Xi+1> Xi.
Проиллюстрируем использование способа примером.
Пусть L = 10 метров. Возьмем желоб и выберем на нем шесть сечений с i = 0, 1, 2, 3, 4, 5. Примем  метра, r = 0,1 метра. Расположим сечения на желобе так, что вертикальные линии, соединяющие i-е сечения желоба с плоскостью опоры колонны дадут Х0 = 0, Х1 = 1, Х2 = 3, Х3 = 6, Х4 = 10, Х5
метра, r = 0,1 метра. Расположим сечения на желобе так, что вертикальные линии, соединяющие i-е сечения желоба с плоскостью опоры колонны дадут Х0 = 0, Х1 = 1, Х2 = 3, Х3 = 6, Х4 = 10, Х5  Отсчитаем по этим линиям Уi и получим У0 = 10 м, У1 = 7,166 м, У2 = 5,223 м, У3 = 3,283 м, У4 = 1,815 м, У5 = 0 м.
Отсчитаем по этим линиям Уi и получим У0 = 10 м, У1 = 7,166 м, У2 = 5,223 м, У3 = 3,283 м, У4 = 1,815 м, У5 = 0 м.
Составим следующие пары координат: 1) (Х0; У0) = (0;10); 2) (Х1; У1) = (1; 7,166); 3) (Х2; У2) = (3; 5,223); 4) (Х3; У3) = (6; 3,283); 5) (Х4; У4) = (10; 1,815); 6) (Х5; У5) = (20;0).
Расположим и закрепим на поверхности колонны соответствующие сечения желоба и получим спиральную брахистохрону, развертка которой показана на фиг.3. Из нее видно, что сначала объект транспортирования перемещается по желобу с большим ускорением и приобретает большую скорость. При дальнейшем движении скорость снижается и объект останавливается.
В целом, как показывает эксперимент, быстродействие спирального транспортера с желобом, установленным предложенным способом, оказывается более высоким, чем с желобом, установленным, как обычно, примерно на 30–35 процентов. В этом состоит технический результат предлагаемого изобретения. Повышение же быстродействия позволяет расширить область применения спиральных гравитационных транспортеров и делает их более универсальными.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОСБЕРЕГАЮЩИЙ ПЛУГ | 2013 |
|
RU2518256C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАМЕТРА ОБЪЕКТОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С НАПРАВЛЕННО ОТРАЖАЮЩЕЙ ПОВЕРХНОСТЬЮ | 2007 |
|
RU2379628C2 |
| ГРАВИТАЦИОННЫЙ ЗИГЗАГООБРАЗНЫЙ ЛОТОК | 2024 |
|
RU2825210C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| ПРИЛИВНАЯ АККУМУЛИРУЮЩАЯ ГЭС | 2018 |
|
RU2718992C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2202694C1 |
| Система защиты строительных конструкций от сверхнормативных взрывных, ударных и сейсмических воздействий | 2017 |
|
RU2649207C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КРИВОЛИНЕЙНОЙ СПИЦЫ СЕТЧАТОЙ СТРУКТУРЫ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И КРИВОЛИНЕЙНАЯ СПИЦА СЕТЧАТОЙ СТРУКТУРЫ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 2011 |
|
RU2481237C1 |
Для установки желоба на колонне выбирают i-е полученные сечения желоба, одну из точек линии пересечения поверхности колонны с плоскостью ее опоры принимают за начало окружной X и вертикальной У координат транспортера, затем на поверхности колонны изображают вертикальные линии, соединяющие i-е сечения желоба с плоскостью опоры колонны и отстающие от начала координат по окружности колонны на расстояниях Xi, на линиях откладывают отрезки длиной Уi, отсчитываемые от линии пересечения поверхности колонны с плоскостью ее опоры, после чего желоб каждого i-го сечения закрепляют бортом на колонне в точке с координатами Xi, Уi. Техническим результатом изобретения является обеспечение движения объектов транспортирования по спиральной брахистохроне, что делает быстродействие транспортеров максимально возможным. 3 ил.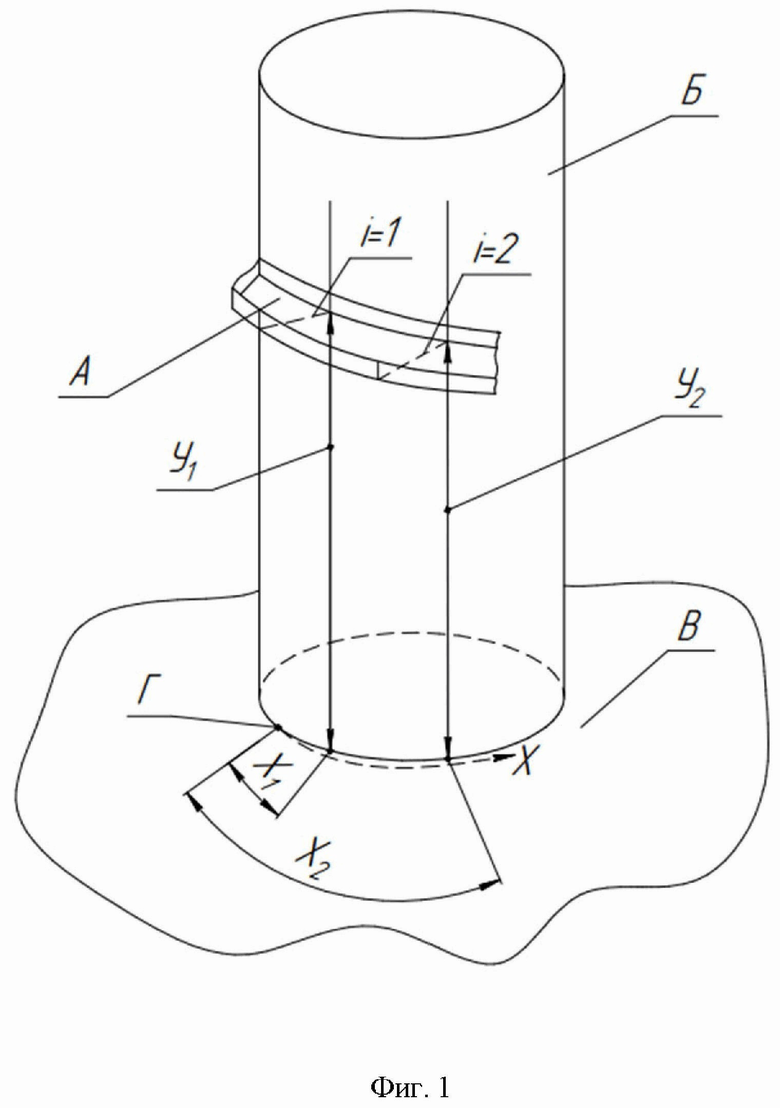
Способ установки жёлоба на колонне спирального гравитационного транспортера, характеризующийся тем, что выбирают i-е поперечные сечения жёлоба, одну из точек линии пересечения поверхности колонны с плоскостью ее опоры принимают за начало окружной Х и вертикальной У координат транспортера, затем на поверхности колонны изображают вертикальные линии, соединяющие i-е сечения жёлоба с плоскостью опоры колонны и отстоящие от начала координат по окружности колонны на расстояниях Xi, на линиях откладывают отрезки длиной Уi, отсчитываемые от линии пересечения поверхности колонны с плоскостью ее опоры, после чего жёлоб каждого i-го сечения закрепляют бортом на колонне в точке с координатами Xi, Уi, при этом числовые значения последних определяют по соотношению

где i = 0, 1, 2, 3 … - порядковый номер сечения жёлоба;
L - высота колонны транспортера, метры;
r - радиус колонны, доли метра;
l - единица измерения длины проекции жёлоба на координату X, такая, что l≥2πr, метры;
Xi = 0, …, l/πr - расстояние от начала координат транспортера, выражаемое количеством отрезков длиной 2πr/l, таких, что Xi+1> Xi.
| US 20220009717 A1, 13.01.2022 | |||
| CN 106697713 A, 24.05.2017 | |||
| CN 101391694 A, 25.03.2009. |
