Изобретение относится к героторным механизмам винтовых забойных двигателей для бурения нефтяных и газовых скважин, к винтовым насосам для добычи нефти и перекачивания жидкостей, а также к винтовым гидромоторам общего назначения.
Известен многозаходный винтовой героторный механизм винтового забойного двигателя, содержащий статор с внутренними винтовыми зубьями, выполненными из упругоэластичного материала, например из резины, и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, причем ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев, профили наружных зубьев ротора и внутренних зубьев статора в торцевом сечении выполнены взаимоогибаемыми, а ходы винтовых зубьев ротора и статора пропорциональны числам их зубьев [1].
В известной конструкции профили зубьев статора и ротора в торцевом сечении выполнены как огибающие общего исходного контура циклоидальной рейки, очерченной эквидистантой укороченной циклоиды. При этом в торцевом сечении толщина Ct зуба статора по среднему диаметру Dcp зубьев и окружной шаг St этих зубьев связаны соотношением Ct/St=0,45-0,65, а толщина CN зуба статора по среднему диаметру Dcp зубьев в сечении, перпендикулярном направлению винтовой линии зуба статора и радиальная высота h зуба статора, связаны соотношением CN/h≥1,75.
Недостатком известного героторного механизма является то, что суммарный диаметральный натяг в механизме распределяется по зубьям статора неравномерно: деформация выступа зуба статора значительно больше деформации его впадины. В результате этого нарушается расчетная кинематика героторного механизма, увеличивается износ по вершинам зубьев ротора и статора, уменьшается ресурс героторного механизма.
Наиболее близким к заявленному изобретению является героторный механизм, содержащий статор с внутренними винтовыми зубьями, выполненными, из упругоэластичного материала, например, из резины, и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, причем ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев, ходы винтовых зубьев ротора и статора пропорциональны числам их зубьев. Профиль зубьев статора в торцевом сечении выполнен как огибающая исходного контура циклоидальной рейки, очерченной эквидистантой с радиусом RC1 укороченной циклоиды, а профиль зубьев ротора в торцевом сечении выполнен как огибающая другого исходного контура циклоидальной рейки с радиусом эквидистанты RC2, выполненным больше чем RC1 или связанным соотношением Rс2= Rc1+(0,1. ..0,5)E, где Е - радиус производящей окружности, равный величине эксцентриситета [2].
Другим вариантом известного изобретения является также выполнение героторного механизма таким образом, что профиль зубьев статора в торцевом сечении выполнен как огибающая исходного контура циклоидальной рейки, очерченной эквидистантой с радиусом Rc1 укороченной циклоиды, а профиль зубьев ротора в торцевом сечении очерчен сопряженными дугами окружностей, причем, выступ зуба ротора очерчен дугой радиуса RB, большего, чем радиус эквидистанты статора Rc1, или связан с ним соотношением Rc2+Rc1(0,1 0,5)Е, а профиль впадины зуба ротора очерчен дугой радиуса Rv, зависящего от числа зубьев ротора, его наружного диаметра и эксцентриситета [2].
Однако указанные варианты героторных механизмов требуют осуществления селективной сборки рабочих пар в связи с необходимостью подбора ротора и статора по радиальному натягу. Кроме того, при работе за счет возникновения бокового натяга, распределенного равномерно при выпукло-вогнутом контакте зуба ротора с впадиной зуба статора, появляется повышенный износ боковых сторон упругоэластичных зубьев статора; за счет наличия радиального и бокового натягов в зацеплении возникают силы трения в зонах контакта зубьев, создающие моменты сопротивления, препятствующие вращению ротора вокруг своей оси и его планетарному движению, что ухудшает энергетические характеристики механизма. В связи с тем, что исходные контуры инструментальных реек ротора и статора разные, исключается возможность изготовления ротора и сердечника пресс-формы статора одним инструментом.
Техническая задача, на решение которой направлено заявленное изобретение, заключается в улучшении энергетических характеристик героторного механизма винтовой гидромашины при подводе к ней гидравлической мощности и возникновении перепада давления в рабочих органах, повышении ее ресурса и снижении гидромеханических потерь за счет образования в зацеплении одностороннего бокового натяга, улучшения уплотнения по контактным линиям в зоне полюсов зацепления и снижения контактных нагрузок в зоне максимальных скоростей скольжения.
Другой технической задачей является повышение технологичности изготовления и уменьшение стоимости героторного механизма за счет устранения селективного подбора рабочих пар по радиальному натягу, а также за счет обеспечения возможности изготовления ротора и сердечника пресс-формы статора одним инструментом.
Сущность технического решения заключается в том, что в героторном механизме винтовой гидромашины, содержащем статор с внутренними винтовыми зубьями, выполненными из упругоэластичного материала, например из резины, ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, причем ходы винтовых линий статора и ротора пропорциональны числам их зубьев, ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев, согласно изобретению циклоидальные профили одной половины зуба ротора и одной половины зуба статора в торцевом сечении получены как огибающие исходного контура инструментальной рейки, очерченного эквидистантой укороченной циклоиды с радиусом эквидистанты rц, а корригированные профили другой половины зуба ротора и другой половины зуба статора в торцевом сечении получены как огибающие исходного контура инструментальной рейки, образованного сопряжением дуг окружностей, при обкатке исходных контуров без скольжения по соответствующим инструментальным диаметрам, радиус одной из окружностей, образующих исходный контур, формирующий корригированный профиль, равен радиусу эквидистанты rц, радиус другой определен выражением rв=(πr)2/(4a)+a-r, координаты точек исходного контура, формирующего корригированный профиль, определены выражениями: Xn = rц(1-cosΨn), Yn = πr-rцsinΨn, Xm = rв(cosΨm-1)+2a, Ym = rвsinΨm, угол профиля в текущих точках определен выражениями αpt = (π/2)-Ψn, αpt = (π/2)-Ψm, где Ψn = 0...Ψa, Ψm = 0...Ψa - центральные углы текущих точек с выбранной дискретностью на участках исходного контура с радиусами rц и rв соответственно, Ψa = arcsin(πr/(rц+rв)) - центральный угол сопрягаемых окружностей в точке сопряжения, а - радиус производящей окружности, r - радиус катящейся окружности, при этом корригированный профиль зуба ротора контактирует в зацеплении с циклоидальным профилем зуба статора, а циклоидальный профиль зуба ротора контактирует в зацеплении с корригированным профилем зуба статора и образуют в зацеплении боковой натяг.
При выполнении указанных соотношений для исходного контура инструментальной рейки и при обеспечении контакта в зацеплении корригированного профиля зуба ротора с циклоидальным профилем зуба статора обеспечивается односторонний боковой натяг в зацеплении, за счет которого достигается надежное уплотнение по контактным линиям при подаче к гидромашине потоком жидкости гидравлической мощности, появляется возможность уменьшения радиального натяга в зацеплении и сборки рабочих пар без селективного подбора. Снижается момент сил сопротивления за счет уменьшения радиального натяга и контактных нагрузок на участках, максимально удаленных от полюса зацепления, т.е. в зоне максимальных скоростей скольжения, обеспечивается возможность изготовления роторов и сердечников пресс-форм одним инструментом.
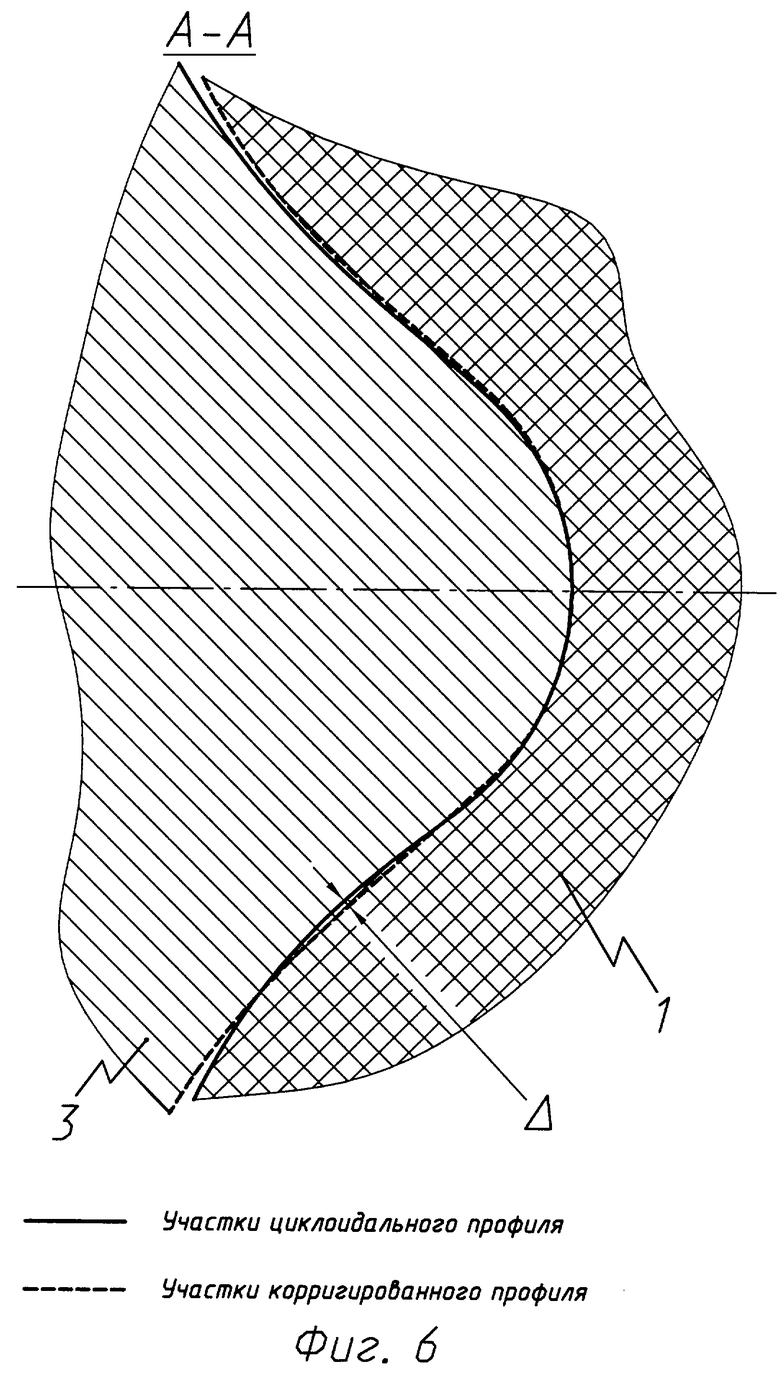
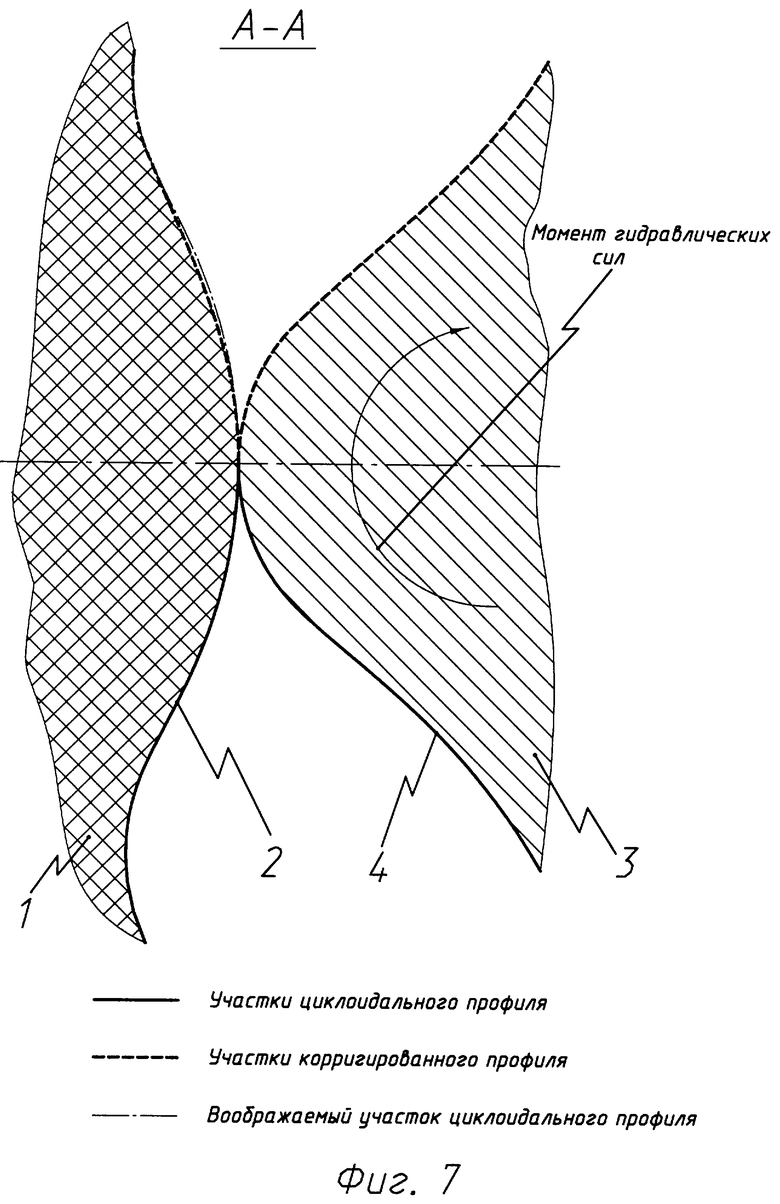
На фиг.1 показан продольный разрез героторного механизма винтовой забойной гидромашины; на фиг. 2 показано поперечное сечение героторного механизма по линии А-А; на фиг.3 показана схема образования исходного контура инструментальной рейки, одна часть которого описана эквидистантой укороченной циклоиды, а другая получена сопряжением дуг окружностей с радиусами rц и rв; на фиг.4 показано образование профиля ротора героторного механизма от исходного контура инструментальной рейки; на фиг.5 показано образование профиля статора от исходного контура инструментальной рейки; на фиг. 6 показана часть поперечного сечения героторного механизма по линии А-А в зоне выпукло-вогнутого контакта зуба ротора с впадиной зуба статора в увеличенном масштабе; на фиг.7 показана часть поперечного сечения героторного механизма по линии А-А в зоне выпукло-выпуклого контакта зуба ротора с выступом зуба статора в увеличенном масштабе.
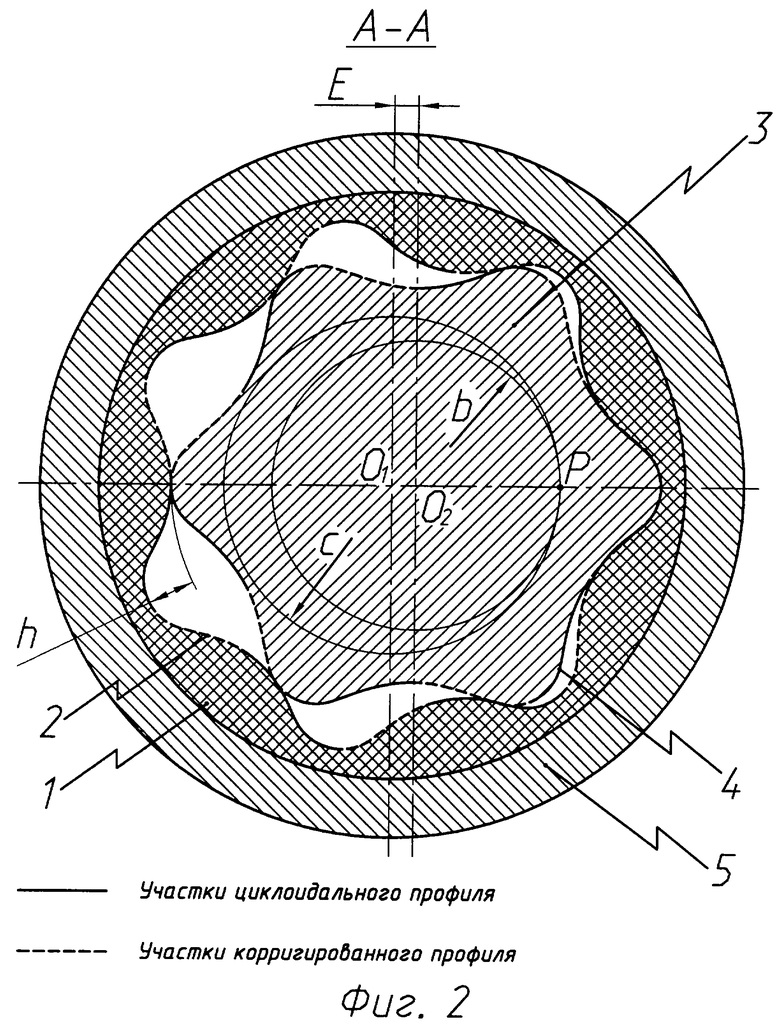
Героторный механизм винтовой забойной гидромашины, см. фиг.1, 2, содержит статор 1 с внутренними винтовыми зубьями 2, ротор 3 с наружными винтовыми зубьями 4, число которых на единицу меньше числа внутренних винтовых зубьев 2 статора 1. Внутренние винтовые зубья 2 статора 1 выполнены из упругоэластичного материала, например из резины, привулканизованной к внутренней поверхности остова 5 статора 1. Ось O1-O1 статора смещена относительно оси О2-О2 ротора на величину эксцентриситета Е, равную половине радиальной высоты h зубьев 2 и 4 или радиусу а производящей окружности. Рабочая центроида (начальная окружность) статора 1 радиусом c=Ez1 касается рабочей центроиды (начальной окружности) ротора 2 радиусом b=Ez2 в полюсе зацепления Р, см. фиг.2. Ходы винтовых линий Т1 и Т2 зубьев 2 и 4 соответственно статора 1 и ротора 3, см. фиг. 1, пропорциональны числам их зубьев z1 и z2. Причем ротор и статор собраны таким образом, что участок циклоидального профиля зуба 4 ротора 3 контактирует с участком корригированного профиля зуба 2 статора 1 (см. фиг.2).
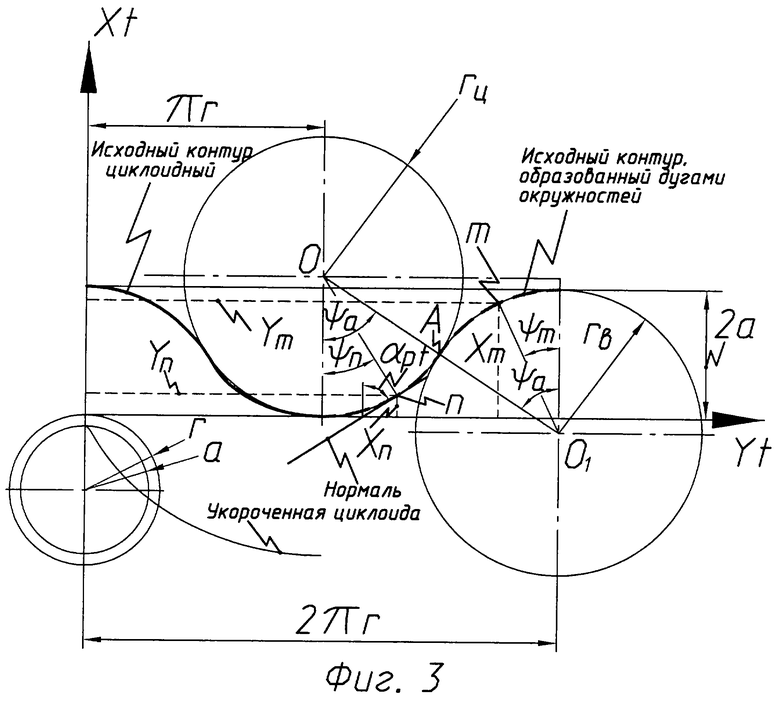
Существенным признаком исходного контура инструментальной рейки героторного механизма согласно изобретению является то, что он состоит из двух участков см. фиг.3:
- очерченного эквидистантой укороченной циклоиды;
- сопряженного дугами окружностей, радиус одной из которых равен радиусу эквидистанты rц, радиус другой: rв=(πr)2/(4a)+a-r, координаты текущих точек определены выражениями Xn = rц(1-cosΨn), Yn = πr+rцsinΨn, Xm = rв(cosΨm-1)+2a, Ym = 2πr-rвsinΨm, где Ψn = 0...Ψa, Ψm = 0...Ψa с выбранной дискретностью, Ψa = arcsin(πr/(rц+rв)). Часть контура, образованная дугами окружностей, имеет длину и высоту, равную длине и высоте участка, очерченного эквидистантой укороченной циклоиды, т.е. πr и 2а соответственно. При этом угол профиля исходного контура, сопряженного дугами окружностей, определен выражениями αpt = (π/2)-Ψn или αpt = (π/2)-Ψm.
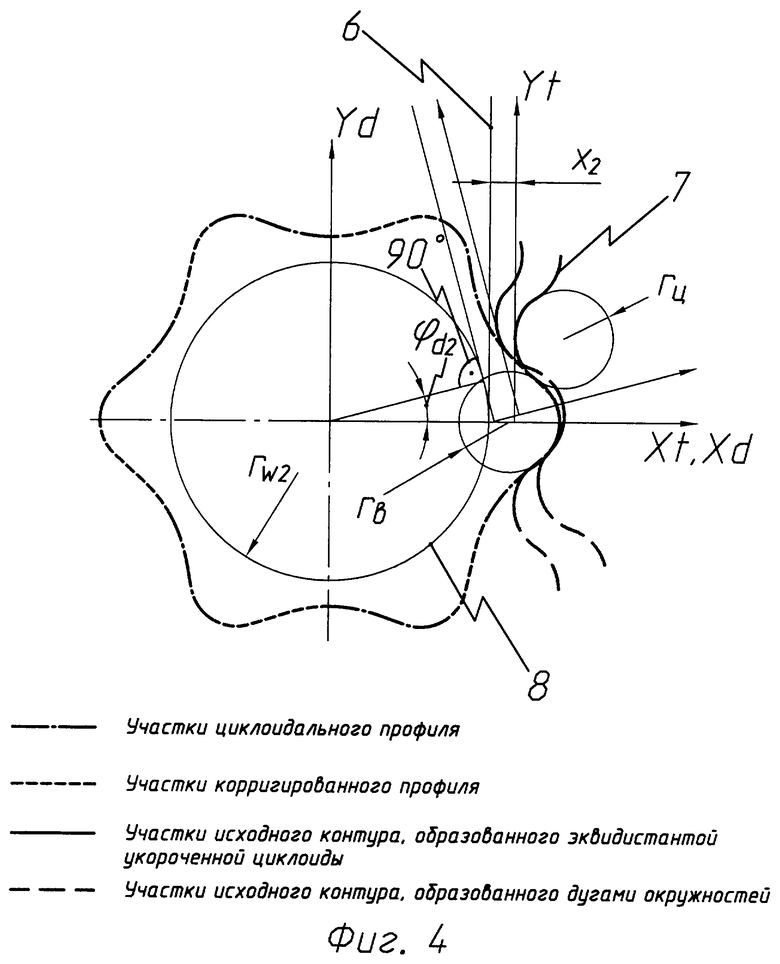
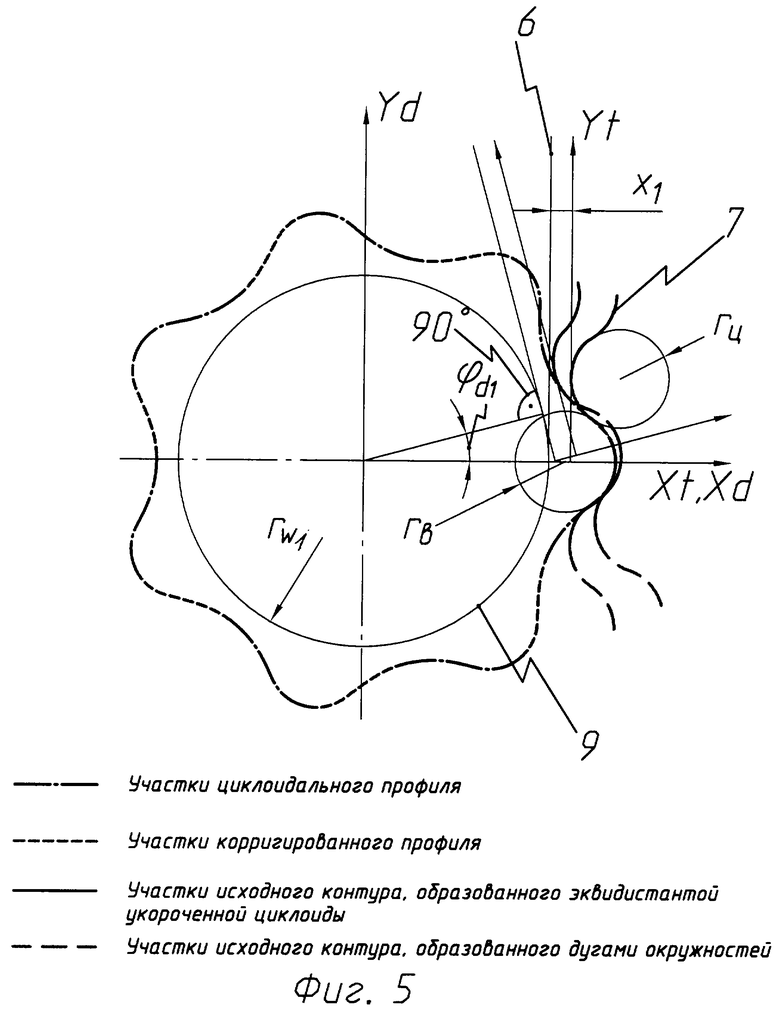
Схема образования профилей ротора 3 и статора 1 в торцевом сечении показана на фиг. 4 и 5: профиль зубьев 4 и 2 образуется при качении инструментальной прямой 6 и связанного с ней исходного контура 7 без скольжения по соответствующим инструментальным окружностям. Радиус инструментальной окружности 8 ротора 3 равен rw2=rz2; радиус инструментальной окружности 9 статора 1 равен rw1=rz1. Для выполнения заданных диаметров ротора 3 и статора 1 по выступам зубьев 4 и впадинам зубьев 2 задаются величины смещения х1 и х2 исходных контуров статора и ротора соответственно, см. фиг.4 и 5. Торцевой корригированный профиль ротора 3 и статора 1 определен выражениями
 соответственно,
соответственно,
где
ϕd2 = 2((Yn(m)-(x2+Xn(m))ctgαpt)/dw2), ϕd1 = 2((Yn(m)-(x1+Xn(m))ctgαpt)/dw1) -
углы поворота подвижной системы координат, связанной с инструментальной рейкой относительно неподвижной системы координат, связанной с соответствующей инструментальной окружностью, см. фиг.4 и 5. При этом для совпадения начала координат подвижной системы с осью Хd ординаты текущих точек исходного профиля определены выражениями Yn = πr-rцsinΨn; Ym = rвsinΨm.
Выполнение исходного контура 7 инструментальной рейки согласно заявленному изобретению и сборка ротора и статора таким образом, что участок циклоидального профиля зуба 4 ротора 3 контактирует с участком корригированного профиля зуба 2 статора 1, позволяют:
- получить в зацеплении боковой натяг Δ, см. фиг.6, обеспечивающий надежное уплотнение по контактным линиям и возможность уменьшения радиального натяга;
- уменьшить силы трения в зоне максимальных скоростей скольжения за счет изменения геометрии рабочих органов, см. фиг.7, и возможности уменьшения радиального натяга.
Героторный механизм забойной гидромашины работает следующим образом. При использовании героторного механизма в винтовом забойном двигателе промывочная жидкость подается в верхнюю часть героторного механизма по колонне бурильных труб (на фиг. не показаны). Под действием перепада давления промывочной жидкости ротор 3 совершает планетарное движение внутри статора 1, обкатываясь винтовыми зубьями 4 по винтовым зубьям 2 статора 1, см. фиг.1, 2. При этом ось О2 ротора 3 совершает вращение вокруг оси O1 статора 1 по окружности радиуса Е, а сам ротор 3 поворачивается вокруг своей оси O2 в направлении, противоположном направлению планетарного движения, см. фиг.2.
Кинематически движение ротора 3 относительно статора 1 определяется качением без скольжения центроиды ротора 3 радиусом b=Ez2 по центроиде статора 1 радиусом c=Ez1 с мгновенным центром вращения ротора 3, находящимся в точке касания центроид - полюс Р зацепления, см. фиг.2. В зоне полюса зацепления Р происходит разделение полостей высокого и низкого давления по контактным линиям, при этом корригированный профиль зуба 4 ротора 3 контактирует в зацеплении с циклоидальным профилем зуба 2 статора 1, а циклоидальный профиль зуба 4 ротора 3 контактирует в зацеплении с корригированным профилем зуба 2 статора 1 и образуют в зацеплении боковой натяг Δ, обеспечивающий надежное уплотнение между полостями высокого и низкого давлений, что способствует снижению утечек рабочей жидкости и, как следствие, повышению энергетических характеристик героторного механизма (мощности и КПД).
Кроме того, за счет уменьшения радиального натяга и снижения контактных нагрузок в зоне, максимально удаленной от полюса зацепления, где скорости скольжения максимальны, см. фиг.7 (воображаемый участок циклоидального профиля), снижаются момент сил сопротивления и износ вершин зубьев 2 и 4 статора 1 и ротора 3, что также способствует повышению энергетических характеристик героторного механизма и его износостойкости.
Планетарное вращение ротора 3 передается на вал опорного узла и связанный с ним породоразрушающий инструмент (на фиг. не показаны).
При использовании героторного механизма в винтовых насосах ротор 3 приводится во вращение и, обкатываясь по зубьям 2 статора 1, преобразует механическую энергию вращения в гидравлическую энергию потока жидкости. Кинематика движения ротора 3 винтового насоса и преимущества, получаемые при использовании предложенного героторного механизма, аналогичны описанным выше для винтового двигателя.
Источники информации
1. RU, патент 2165531, кл. F 01 С 1/16, 5/04, Е 21 В 4/02, 2000.
2. RU, патент 2166603, кл. Е 21 В 4/02, 2000 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2003 |
|
RU2228444C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ЗАБОЙНОЙ ГИДРОМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2166603C1 |
| ГЕРОТОРНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2006 |
|
RU2321767C1 |
| МНОГОЗАХОДНЫЙ ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2001 |
|
RU2194880C2 |
| ГЕРОТОРНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2006 |
|
RU2321768C1 |
| ГЕРОТОРНЫЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2002 |
|
RU2232860C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2006 |
|
RU2309237C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2360129C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2000 |
|
RU2162926C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2205998C1 |
Изобретение относится к героторным механизмам винтовых забойных двигателей, к винтовым насосам, а также к винтовым гидромоторам общего назначения. Циклоидальные профили одной половины зуба ротора и одной половины зуба статора в торцевом сечении очерчены эквидистантой укороченной циклоиды, а корригированные профили другой половины зуба ротора и другой половины зуба статора в торцевом сечении получены как огибающие исходного контура инструментальной рейки, образованного сопряжением дуг окружностей, при обкатке исходных контуров без скольжения по соответствующим инструментальным диаметрам. Радиус одной из окружностей, образующих исходный контур, равен радиусу эквидистанты, радиус другой определен математическим выражением. Повышаются энергетические характеристики, надежность, долговечность, обеспечиваются возможность сборки рабочих органов без селективного подбора, изготовления ротора и сердечника пресс-формы одним инструментом. 7 ил.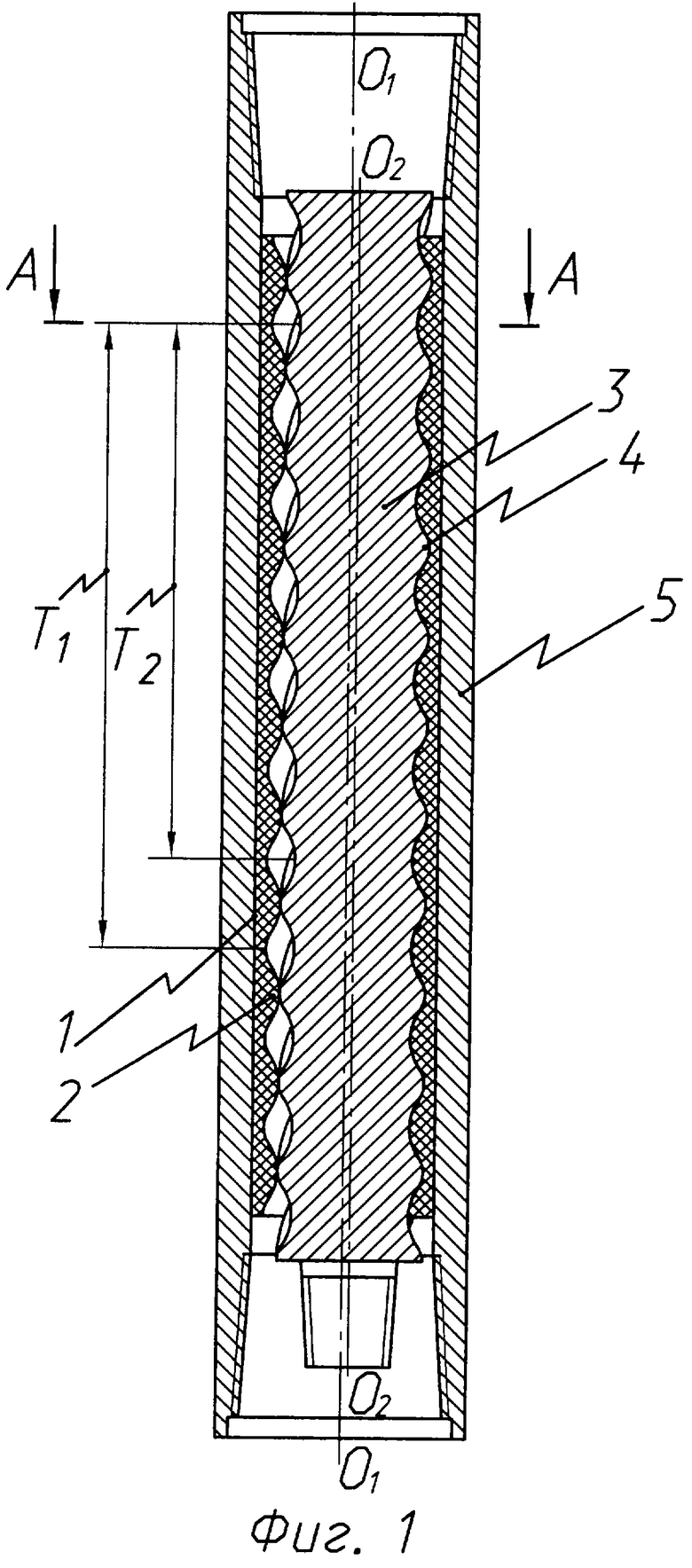
Героторный механизм винтовой гидромашины, содержащий статор с внутренними винтовыми зубьями, выполненными из упругоэластичного материала, например, из резины, ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, причем ходы винтовых линий статора и ротора пропорциональны их числам зубьев, ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев, отличающийся тем, что циклоидальные профили одной половины зуба ротора и одной половины зуба статора в торцевом сечении очерчены эквидистантой укороченной циклоиды с радиусом эквидистанты rц, а корригированные профили другой половины зуба ротора и другой половины зуба статора в торцевом сечении получены как огибающие исходного контура инструментальной рейки, образованного сопряжением дуг окружностей, при обкатке исходных контуров без скольжения по соответствующим инструментальным диаметрам, радиус одной из окружностей, образующих исходный контур, равен радиусу эквидистанты rц, радиус другой определен выражением rв = (πr)2/(4α)+α-r, координаты точек исходного контура, формирующего корригированный профиль, определены выражениями
Xn = rц(1-cosΨn);
Yn = πr-rцsinΨn;
Xm = rв(cosΨm-1)+2α;
Ym = rвsinΨm,
угол профиля в текущих точках определен выражениями
αpt = (π/2)-Ψn;
αpt = (π/2)-Ψm,
где Ψn = 0...Ψa, Ψm = 0...Ψa - центральные углы текущих точек с выбранной дискретностью на участках исходного контура с радиусами rц и rв соответственно;
Ψa = arcsin(πr/(rц+rв)) - центральный угол сопрягаемых окружностей в точке сопряжения;
а - радиус производящей окружности;
r -радиус катящейся окружности,
при этом корригированный профиль зуба ротора контактирует в зацеплении с циклоидальным профилем зуба статора, а циклоидальный профиль зуба ротора контактирует в зацеплении с корригированным профилем зуба статора и образует в зацеплении боковой натяг.
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ЗАБОЙНОЙ ГИДРОМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2166603C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2000 |
|
RU2165531C1 |
| Забойный винтовой двигатель | 1979 |
|
SU926209A1 |
| US 3912426 А, 14.10.1975 | |||
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ПОДВИЖНОСТИ ПАЛЬЦЕВ НОГ И ИХ МАССАЖА | 1993 |
|
RU2084254C1 |
| УСТРОЙСТВО ДЛЯ СОВМЕЩЕННОГО МЕХАНИЧЕСКОГО И ТЕРМИЧЕСКОГО РАСШИРЕНИЯ СКВАЖИН | 2007 |
|
RU2349729C2 |
