Перекрестная ссылка на родственные заявки
[1] Согласно настоящей заявке испрашивается приоритет согласно заявке на патент Китайской Народной Республики №202010231552.9, поданной в патентное ведомство Китайской Народной Республики 27 марта 2020 г. под названием «ПОЛКА И СКЛАДСКОЕ УСТРОЙСТВО», содержание которой полностью включено в настоящий документ посредством ссылки. Согласно настоящей заявке испрашивается приоритет согласно заявке на патент Китайской Народной Республики №202021892576.0, поданной в патентное ведомство Китайской Народной Республики 2 сентября 2020 г. с названием полезной модели «ПОЛКА И СКЛАДСКОЕ УСТРОЙСТВО», содержание которой полностью включено в настоящий документ посредством ссылки. Согласно настоящей заявке испрашивается приоритет согласно заявке на патент Китайской Народной Республики №202010231545.9, поданной в патентное ведомство Китайской Народной Республики 27 марта 2020 г. под названием «СКЛАДСКОЕ УСТРОЙСТВО, СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ», содержание которой полностью включено в настоящий документ посредством ссылки. Согласно настоящей заявке испрашивается приоритет согласно заявке на патент Китайской Народной Республики №202010232310.1, поданной в патентное ведомство Китайской Народной Республики 27 марта 2020 г. под названием «СПОСОБЫ И УСТРОЙСТВА УПРАВЛЕНИЯ СКЛАДСКИМИ ОПЕРАЦИЯМИ, УСТРОЙСТВО И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ИНФОРМАЦИИ», содержание которой полностью включено в настоящий документ посредством ссылки. Кроме того, согласно настоящей заявке испрашивается приоритет согласно заявке на патент Китайской Народной Республики №202022292766.5, поданной в патентное ведомство Китайской Народной Республики 15 октября 2020 г. с названием полезной модели «ПОГРУЗОЧНО-РАЗГРУЗОЧНАЯ ПЛОЩАДКА И РАБОЧЕЕ МЕСТО», содержание которой полностью включено в настоящий документ посредством ссылки.
Область техники, к которой относится настоящее изобретение
[2] Настоящее изобретение относится к области складских технологий и, в частности, к складскому устройству, системе и способу управления.
Предшествующий уровень техники настоящего изобретения
[3] В существующей складской отрасли для доступа к грузам и их перемещения, как правило, используют роботов с автоматическими функциями подъема и перемещения грузов. Однако из-за того, что роботам приходится выполнять слишком много операций, связанных с хранением грузов, это приводит к низкой эффективности складских операций с грузами.
Краткое раскрытие настоящего изобретения
[4] Варианты осуществления настоящего изобретения обеспечивают складское устройство, систему и способ управления для решения или облегчения одной или нескольких технических проблем в соответствующей области техники.
[5] Для достижения указанной выше цели в настоящем изобретении приняты следующие технические решения:
[6] Согласно первому аспекту вариантов осуществления настоящего изобретения, один вариант осуществления настоящего изобретения обеспечивает складское устройство, предусматривающее:
[7] некоторое количество стеллажей, где каждый из стеллажей предусматривает по меньшей мере одну полку временного хранения, по меньшей мере одну полку хранилища и некоторое количество стоек, расположенных на расстоянии друг от друга по горизонтали, и полка хранилища расположена на некотором расстоянии по вертикали от полки временного хранения, при этом полку временного хранения используют для обеспечения некоторого количества местоположений временного хранения, и полку хранилища используют для обеспечения некоторого количества местоположений хранения;
[8] первый проход для роботов, предназначенный для передвижения первого робота, при этом первого робота используют для доступа к грузу на полке временного хранения; и
[9] второй проход для роботов, предназначенный для передвижения второго робота, при этом второго робота используют для перемещения груза между полкой временного хранения и полкой хранилища.
[10] Согласно второму аспекту вариантов осуществления настоящего изобретения, один вариант осуществления настоящего изобретения обеспечивает способ управления поступлением на склад, при этом способ предусматривает:
[11] определение заданного местоположения временного хранения согласно заданному местоположению хранения заданного груза;
[12] команду первому роботу на перемещение заданного груза в заданное местоположение временного хранения; и
[13] в случае получения сигнала от первого робота о завершении перемещения, команду второму роботу на перемещение заданного груза из заданного местоположения временного хранения в заданное местоположение хранения.
[14] Согласно третьему аспекту вариантов осуществления настоящего изобретения, один вариант осуществления настоящего изобретения обеспечивает способ управления отгрузкой со склада, при этом способ предусматривает:
[15] команду второму роботу на перемещение заданного груза из текущего местоположения хранения;
[16] определение заданного местоположения временного хранения согласно местоположению второго робота;
[17] команду второму роботу на перемещение заданного груза в заданное местоположение временного хранения; и
[18] в случае получения сигнала от второго робота о завершении перемещения, команду первому роботу на перемещение заданного груза из заданного местоположения временного хранения.
[19] Согласно четвертому аспекту вариантов осуществления настоящего изобретения, один вариант осуществления настоящего изобретения обеспечивает складскую систему, предусматривающую:
[20] складское устройство согласно любому из вышеупомянутых вариантов осуществления;
[21] устройство управления, предусматривающее процессор и запоминающее устройство, при этом на запоминающем устройстве хранят команды, и при загрузке и исполнении команды процессором осуществляющее способ согласно любому из вышеупомянутых вариантов осуществления;
[22] первого робота, который передвигается по первому проходу для роботов; и
[23] второго робота, который передвигается по второму проходу для роботов.
[24] Одно из вышеупомянутых технических решений обладает следующими преимуществами или полезными эффектами: первый робот имеет непосредственный доступ к грузам на полке временного хранения, что исключает необходимость выдвижения манипулятора робота к полке стеллажа и повышает эффективность доступа к грузам; кроме того, на полке временного хранения могут временно хранить грузы, а в местоположении для хранения, обеспеченное полкой хранилища, грузы могут хранить в течение длительного времени, что удобно для совместного использования полки временного хранения и полки хранилища с целью повышения эффективности складских операций с грузами; кроме того, соответственно формируют первый проход для роботов и второй проход для роботов, что позволяет избежать передвижения первого и второго робота по одному и тому же проезду, повысить эффективность первого робота и второго робота и тем самым повысить эффективность складских операций.
Краткое описание фигур
[25] Для более четкого описания технических решений в вариантах осуществления настоящего изобретения или предшествующего уровня техники, ниже представлено краткое описание прилагаемых фигур, которые необходимы для описания вариантов осуществления или предшествующего уровня техники. Очевидно, что в последующем описании прилагаемые фигуры представляют некоторые варианты осуществления, описанные в числе вариантов осуществления настоящего изобретения, и специалисты в данной области техники могут преобразовать эти прилагаемые фигуры в другие.
[26] На фиг. 1 представлена трехмерная принципиальная схема конструкции складского устройства согласно варианту 1 осуществления настоящего изобретения.
[27] На фиг. 2 представлен схематический вид сбоку конструкции складского устройства согласно варианту 1 осуществления настоящего изобретения.
[28] На фиг. 3 представлена принципиальная схема конструкции складского устройства согласно варианту 2 осуществления настоящего изобретения.
[29] На фиг. 4 представлена принципиальная схема конструкции стеллажа согласно варианту 1 осуществления настоящего изобретения.
[30] На фиг. 5 представлена принципиальная схема конструкции стеллажа согласно варианту 1 осуществления настоящего изобретения.
[31] На фиг. 6 представлена принципиальная схема конструкции первого робота согласно варианту 1 осуществления настоящего изобретения.
[32] На фиг. 7 представлена схема взаимодействия между раздвоенным манипулятором первого робота и двойной прорезью в стеллаже согласно варианту 1 осуществления настоящего изобретения;
[33] На фиг. 8 представлена принципиальная схема конструкции второго робота согласно варианту 1 осуществления настоящего изобретения.
[34] На фиг. 9 представлена принципиальная схема сценария применения согласно варианту 1 осуществления настоящего изобретения.
[35] На фиг. 10 представлена блок-схема способа управления складскими операциями согласно варианту 2 осуществления настоящего изобретения.
[36] На фиг. 11 представлена блок-схема работы на стадии S1001, показанной на фиг. 10.
[37] На фиг. 12 представлена принципиальная схема сценария управления складскими операциями согласно одному варианту осуществления настоящего изобретения.
[38] На фиг. 13 представлена принципиальная схема способа отгрузки со склада согласно варианту 3 осуществления настоящего изобретения.
[39] На фиг. 14 представлена блок-схема работы на стадии S1302, показанной на фиг. 13;
[40] На фиг. 15 представлена принципиальная схема складской системы согласно варианту 4 осуществления настоящего изобретения.
[41] На фиг. 16 представлена принципиальная схема устройства управления согласно варианту 4 осуществления настоящего изобретения.
[42] На фиг. 17 представлена схема расположения поворотных колес и приводных колес первого робота.
[43] На фиг. 18 представлена схема расположения шасси относительно наклонной плоскости в случае, когда первый робот поднимается по наклонной плоскости.
[44] На фиг. 19А представлена первая принципиальная схема погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения.
[45] На фиг. 19В представлен вид сверху первой принципиальной схемы погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения.
[46] На фиг. 19С представлен вид сбоку первой принципиальной схемы погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения.
[47] На фиг. 20А представлено первое схематическое изображение состояния первого робота, передвигающегося вдоль наклонной площадки к основной части площадки согласно варианту 5 осуществления настоящего изобретения;
[48] На фиг. 20В представлено второе схематическое изображение состояния первого робота, передвигающегося вдоль наклонной площадки к основной части площадки согласно варианту 5 осуществления настоящего изобретения;
[49] На фиг. 20С представлено третье схематическое изображение состояния первого робота, передвигающегося вдоль наклонной площадки к основной части площадки согласно варианту 5 осуществления настоящего изобретения;
[50] На фиг. 20D представлено четвертое схематическое изображение состояния первого робота, передвигающегося вдоль наклонной площадки к основной части площадки согласно варианту 5 осуществления настоящего изобретения;
[51] На фиг. 20Е представлено пятое схематическое изображение состояния первого робота, передвигающегося вдоль наклонной площадки к основной части площадки согласно варианту 5 осуществления настоящего изобретения;
[52] На фиг. 21 представлена вторая принципиальная схема погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения.
[53] На фиг. 22 представлена третья принципиальная схема погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения.
[54] На фиг. 23 представлена принципиальная схема рабочего места согласно варианту 5 осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
[55] Ниже кратко описаны некоторые примеры осуществления изобретения. Специалисту в данной области техники будет понятно, что описанные варианты осуществления могут быть модифицированы различными способами без отступления от сущности и объема настоящего изобретения. Поэтому чертежи и описание имеют иллюстративный характер и не накладывают ограничений.
[56] Вариант 1 осуществления
[57] На фиг. 1 представлена трехмерная принципиальная схема конструкции складского устройства согласно одному варианту осуществления настоящего изобретения.
[58] Как видно из фиг. с 1 по 4, складское устройство 1000 может предусматривать по меньшей мере одну полку 120 временного хранения, при этом полку 120 временного хранения используют для обеспечения по меньшей мере одного местоположения временного хранения; некоторое количество стеллажей 100, где каждый из стеллажей 100 может предусматривать по меньшей мере одну полку 130 хранилища и некоторое количество стоек 110, расположенных на некотором расстоянии друг от друга по горизонтали, и полку 130 хранилища используют для обеспечения по меньшей мере одного местоположения хранения. Полку 120 временного хранения снабжают двойными прорезями 121 и каждую из двойных прорезей 121 используют для взаимодействия с раздвоенным манипулятором 210 первого робота 200; и полку 130 хранилища располагают между стойками ПО на некотором расстоянии по вертикали от полки 120 временного хранения вдоль стоек 110.
[59] Согласно одному примеру, некоторое количество стеллажей 100 могут представлять собой однорядные стеллажи, двухрядные стеллажи или многорядные стеллажи; некоторое количество стеллажей 100 может составлять два или больше; и некоторое количество стеллажей 100 могут располагать в виде колонн (см. фиг. 1 и фиг. 2), рядами (см. фиг. 3) или в виде матрицы. Количество рядов стеллажей, количество стеллажей и схему расположения некоторого количества стеллажей 100 могут выбирать и регулировать согласно фактическим потребностям, при этом в варианте осуществления настоящего изобретения не ограничены ни количество, ни схема расположения некоторого количества стеллажей 100.
[60] Согласно одному примеру, некоторое количество стоек ПО могут ограничивать прямоугольный участок, в пределах которого установлены полка 120 временного хранения и полка 130 хранилища, при этом полку 120 временного хранения и полку 130 хранилища располагают на некотором расстоянии друг от друга по вертикали вдоль стоек ПО. Однако согласно этому варианту осуществления местоположения стоек ПО в схеме не ограничены при условии, что полка 120 временного хранения и полка 130 хранилища могут быть расположены на некотором расстоянии друг от друга по вертикали. Так, стойки 110 могут также проходить в вертикальном направлении через середину полки 120 временного хранения и полки 130 хранилища, а не вдоль их краев.
[61] Для простоты описания в следующем варианте осуществления в качестве стороны полки 120 временного хранения установлена длинная сторона полки 120 временного хранения, а в качестве конца полки 120 временного хранения установлена короткая сторона полки 120 временного хранения.
[62] Согласно одному примеру, некоторое количество местоположений временного хранения, обеспеченных на полке 120 временного хранения, предусматривает два или несколько местоположений временного хранения; двойные прорези 121 расположены под каждым местоположением временного хранения, и двойная прорезь 121 может иметь U-образную, С-образную, I-образную, V-образную форму и т.п. Форму двойной прорези 121 могут выбирать и регулировать согласно фактическим потребностям при условии, что она может взаимодействовать с раздвоенным манипулятором 210 первого робота 200, и в настоящем описании изобретения форма двойной прорези 121 не ограничена.
[63] Полку 120 временного хранения могут располагать на любом уровне стеллажа 100, и в настоящем описании изобретения местоположение полки 120 временного хранения не ограничено. В случае расположения полки 120 временного хранения в на среднем уровне стеллажа 100, полки 130 хранилища располагают выше и ниже полки 120 временного хранения, это может сократить расстояния между полкой 120 временного хранения и полками 130 хранилища и повысить эффективность перемещения грузов между полкой 120 временного хранения и полками 130 хранилища. Грузы могут представлять собой коробки с материалами, продуктами и т.п. Коробки могут представлять собой картонные коробки или коробки из другого материала, и в настоящем описании изобретения тип коробок и содержащиеся в них предметы не ограничены.
[64] Согласно одному примеру, ширина полки 120 временного хранения меньше половины ширины полки 130 хранилища. Так, стеллаж 100 может представлять собой двухрядный стеллаж, полка 120 временного хранения может представлять собой один ряд двухрядного стеллажа, полка 130 хранилища в горизонтальном направлении может иметь ширину равную двум рядам двухрядного стеллажа, и ширину полки 120 временного хранения задают меньшей, чем половина ширины полки 130 хранилища. В силу того, что ширина прохода для грузов больше ширины первого робота 200, ширину полки 120 временного хранения задают меньшей, чем половина ширины полки 130 хранилища, ширина первого проезда 141 может быть больше ширины полки 130 хранилища, чтобы обеспечить проход, достаточный для перемещения грузов первым роботом 200; и поскольку ширина полки 130 хранилища вдвое больше ширины полки 120 временного хранения, на полке 130 хранилища могут хранить груз несколько больший по размеру, чем размеры местоположения временного хранения.
[65] Складское устройство 1000 может предусматривать: первый проход для робота, предназначенный для передвижения первого робота 200, при этом первого робота 200 используют для взаимодействия с двойной прорезью 121 посредством его раздвоенного манипулятора 210 с целью доступа к грузам на полке 120 временного хранения; и второй проход для робота, предназначенный для передвижения второго робота 300, при этом второго робота 300 используют для перемещения грузов между полкой 120 временного хранения и полкой 130 хранилища.
[66] Согласно одному примеру, первый проход для робота может зависеть от конструкции стеллажа 100 или может быть расположен вне стеллажа 100. Второй проход для робота могут располагать на другой стороне вне стеллажа 100 с тем, чтобы отделить первый проход для робота от второго прохода для робота во избежание занятия прохода другим роботом.
[67] Как видно из фиг. 6 и фиг. 7, первый робот 200 может представлять собой автоматически управляемую тележку (Automated Guided Vehicle, сокращенно AGV) с раздвоенным манипулятором 210, и раздвоенный манипулятор 210 могут располагать в верхней части первого робота 200 и также могут располагать в нижней части первого робота 200. В варианте осуществления настоящего изобретения способ расположения раздвоенного манипулятора 210 первого робота 200 не ограничен.
[68] Как видно из фиг. 8, второй робот 300 может представлять собой автоматически управляемую тележку с грузоподъемным механизмом 320 и механизмом 330 доступа, либо может также представлять собой машину для укладки в штабель и т.п.В варианте осуществления настоящего изобретения тип второго робота 300 не ограничен при условии, что у него есть функции доступа к грузам и их перемещения. Согласно складскому устройству 1000 варианта осуществления настоящего изобретения, поскольку у полки 120 временного хранения предусмотрена двойная прорезь 121 для взаимодействия с раздвоенным манипулятором 210 первого робота 200, раздвоенный манипулятор 210 первого робота 200 могут непосредственно вставлять в двойную прорезь 121 полки 120 временного хранения, так что первый робот 200 может иметь непосредственный доступ к грузам на полке 120 временного хранения, что позволяет избежать действия по выдвижению манипулятора робота к стеллажу 100 и повысить эффективность доступа к грузам; кроме того, на полке 120 временного хранения грузы могут хранить временно, а в местоположении хранения, предусмотренном полкой 130 хранилища, грузы могут хранить в течение длительного времени, что удобно для совместного использования полки 120 временного хранения и полки 130 хранилища с целью повышения эффективности складских операций с грузами; кроме того, соответственно формируют первый проход для роботов и второй проход для роботов, что дополнительно позволяет избежать передвижения первого робота 200 и второго робота 300 по одному и тому же проезду, повысить эффективность первого робота 200 и второго робота 300 и тем самым повысить эффективность складских операций.
[69] Согласно одному варианту осуществления, проход для первого робота может предусматривать проход 140 для доступа к грузам, и проход 140 для доступа к грузам расположен ниже полки 120 временного хранения. В случае нахождения первого робота 200 в проходе 140 для доступа к грузу, двойная прорезь 121 взаимодействует с двойным манипулятором 210 первого робота 200 с целью доступа к грузу.
[70] Например, как показано на фиг. 4 и фиг. 7, в случае хранения грузов, первый робот 200 совмещает раздвоенный манипулятор 210 с двойной прорезью 121 на стороне двойной прорези в полке 120 временного хранения и перемещается по проходу 140 для доступа к грузам, таким образом раздвоенный манипулятор 210 входит непосредственно в двойную прорезь 121 и грузы помещают на полку 120 временного хранения, а затем раздвоенный манипулятор 210 опускают вниз, так что коробка с грузом остается на полке 120 временного хранения; и в случае, когда грузы забирают, первый робот 200 передвигается внизу прохода 140 для доступа к грузам, совмещает раздвоенный манипулятор 210 с двойной прорезью 121 под полкой 120 временного хранения и поднимает раздвоенный манипулятор 210, чтобы приподнять коробку с грузом, и затем передвигается в направлении от двойной прорези на полке 120 временного хранения с тем, чтобы покинуть проход 140 для доступа к грузам и забрать ящик с грузом. Таким способом первый робот 200 может непосредственно забирать грузы без остановки движения или прекращать движение на короткое время, при этом исключены действия по управлению выдвижением манипулятора робота к полке, что может повысить эффективность доступа к коробке с грузом, при этом доступ и получение осуществляют под полкой 120 временного хранения, что позволяет эффективно использовать пространство стеллажа 100.
[71] Согласно одному варианту осуществления, проход для доступа к грузам могут дополнительно использовать для передвижения первого робота в случае, если первый робот не нагружен.
[72] Согласно одному примеру, в случае, когда первый робот 200 не нагружен (а именно, первый робот 200 не нагружен грузами), первый робот 200 может передвигаться непосредственно в канале 140 для доступа к грузам, что может повысить эффективность перемещения грузов.
[73] Согласно одному варианту осуществления, как показано на фиг. 4, стойки 110 располагают на внешнем краю полки 130 хранилища, проход для первого робота предусматривает первый проезд 141, и первый проезд 141 располагают между полкой 120 временного хранения и стойками 110, находящимися сбоку от двойной прорези полки 120 временного хранения.
[74] Согласно одному примеру, в случае, когда полку 120 временного хранения располагают на нижнем уровне стоек ПО, полка 120 временного хранения, стойки ПО, находящиеся сбоку от двойной прорези полки 120 временного хранения и пол могут формировать первый проезд 141 для передвижения первого робота 200.
[75] Согласно одному примеру, в случае, когда полку 120 временного хранения располагают не на нижнем уровне стоек ПО, а на других уровнях, полка 120 временного хранения, стойки ПО, находящиеся сбоку от двойной прорези полки 120 временного хранения и полка 130 хранилища, расположенная на уровень ниже уровня полки 120 временного хранения, могут формировать первый проезд 141 для передвижения первого робота 200.
[76] Согласно этому варианту осуществления, первый проезд 141 для передвижения первого робота 200 формируют между полкой 120 временного хранения и стойками 110, расположенными сбоку от двойной прорези полки 120 временного хранения, так что первый робот 200 может передвигаться на любом уровне стеллажа 100, что удобно для взаимодействия первого робота 200 с полкой 120 временного хранения и позволяет не занимать проход за пределами стеллажа 100.
[77] Например, как показано на фиг. 4, стеллаж 100 может дополнительно предусматривать: перекладины 150, при этом каждую из перекладин 150 располагают горизонтально и используют для крепления коротких сторон полки 120 временного хранения и полки 130 хранилища на стойках 110.
[78] На фиг. 5 представлена принципиальная схема конструкции стеллажа 100 согласно другому варианту осуществления настоящего изобретения. Конструкция стеллажа 100 аналогична конструкции стеллажа 100, показанного на фиг. 1, отличие заключается в том, что как показано на фиг. 5, второй проезд 142 для передвижения первого робота 200 формируют между полкой 120 временного хранения и стойками ПО, расположенными на одном конце полки 120 временного хранения. Таким образом, первый робот 200 может передвигаться вдоль стеллажа 100 по второму проезду 142, за счет этого расстояние передвижения первого робота 200 могут сокращать, и могут повышать эффективность перемещения коробок с грузом.
[79] Согласно одному примеру, стеллаж 100 может дополнительно предусматривать: опорную стойку 160, расположенную для опоры у переднего конца полки 120 временного хранения.
[80] Согласно одному варианту осуществления, как показано на фиг. с 1 по 4, полка 120 временного хранения предусматривает некоторое количество полок временного хранения, каждую из полок временного хранения снабжают двойной прорезью 121, и по меньшей мере между двумя полками временного хранения формируют третий проезд для передвижения первого робота 200 (см. поз. 143 на фиг. 9). Таким образом, первый робот 200 может передвигаться вдоль стеллажа 100 между любыми двумя местами временного хранения полки 120 временного хранения, за счет этого расстояние передвижения первого робота 200 могут сокращать, и могут повышать эффективность перемещения коробок с грузом.
[81] Согласно этому варианту осуществления, как показано на фиг. 9, второй проход 310 для робота формируют между соседними стеллажами 100, так что второй робот 300 может передвигаться во втором проходе 310 для робота с тем, чтобы перемещать грузы между полкой 120 временного хранения и полкой 130 хранилища. Грузы, которые временно хранят на полке 120 временного хранения, перемещают на полку 130 хранилища с целью хранения на складе после поступления, или грузы, которые хранят на полке 130 хранилища, перемещают на полку 120 временного хранения с целью временного хранения перед отгрузкой со склада, что может повысить эффективность доступа и эффективность складских операций; кроме того, второй проход 310 для робота не совпадает с проездом для передвижения первого робота 200, что позволяет избежать совместного использования одного и того же проезда первым роботом 200 и вторым роботом 300, повысить эффективность взаимодействия первого робота 200 и второго робота 300 и, тем самым, повысить эффективность складских операций.
[82] Следует отметить, что в складском устройстве 1000 для перемещения грузов и доступа к ним как правило используют второй робот 300 с грузоподъемным механизмом 320 и механизмом 330 доступа. Однако в силу того, что стоимость второго робота 300 относительно высокая, и расстояния между погрузочно-разгрузочной площадкой 400 для грузов и каждым местоположением временного хранения и каждым местоположением хранения на стеллаже 100 относительно большие, затраты на складские операции с грузами в единицу времени относительно высокие, а эффективность относительно невысокая. За счет формирования второго прохода 310 между соседними стеллажами 100, складское устройство 1000 согласно этому варианту осуществления настоящего изобретения может предусматривать второго робота 300 для перемещения грузов между полкой 120 временного хранения и полкой 130, и может предусматривать первого робота 200 для взаимодействия с грузами и перемещения их на полку 120 временного хранения, при этом первый робот 200 может не иметь подъемного механизма, и его стоимость существенно ниже, чем стоимость второго робота 300. Таким образом, в расчете на одного второго робота 300 могут использовать некоторое количество первых роботов 200 для взаимодействия при доступе к грузам, это может снижать затраты на складские операции с грузами в единицу времени и может повысить эффективность складских операций с грузами.
[83] Согласно одному сценарию применения, первый робот 200 может представлять собой робота, который за один раз получает доступ к одной коробке с грузом и перемещает ее, а второй робот 300 может представлять собой робота, который за один раз получает доступ к некоторому количеству коробок с грузом и перемещает их. Второй робот 300 рассчитан на перемещение грузов между полкой 120 временного хранения и полкой 130 хранилища, и первый робот 200 рассчитан на перемещение и доступ к грузам на полке 120 временного хранения, это может снижать затраты на складские операции с грузами в единицу времени и может повысить эффективность складских операций с грузами.
[84] Согласно одному варианту осуществления, как показано на фиг. 9, полка временного хранения предусматривает некоторое количество полок временного хранения, и в каждой из полок временного хранения предусмотрена двойная прорезь. Проход для первого робота предусматривает третий проезд 143, и третий проезд 143 расположен по меньшей мере между двумя полками временного хранения. Ширина третьего проезда 143 может быть больше ширины полки временного хранения в один, два, три или более раз, что не ограничено в настоящем изобретении. Так, для формирования третьего проезда 143 некоторые полки временного хранения могут удалять. Таким образом, с целью повышения эффективности первый робот 200 может проходить вдоль стеллажа в третьем проезде 143.
[85] Согласно одному варианту осуществления, как показано на фиг. 9, первый проход для роботов предусматривает четвертый проезд 144, при этом четвертый проезд 144 располагают между двумя соседними стеллажами 100 и соединяют два третьих проезда 143 или два вторых проезда 142. Таким образом, второй робот 200 может передвигаться вдоль стеллажа 100 по третьему проезду 143 и затем передвигаться вдоль четвертого проезда 144 к соседнему стеллажу 100, тем самым сокращают расстояние передвижения первого робота 200 и повышают эффективность перемещения грузов.
[86] Согласно одному варианту осуществления, складское устройство 1000 дополнительно предусматривает погрузочно-разгрузочную площадку 400 (погрузочно-разгрузочную площадку 400 могут также называть погрузочно-разгрузочным узлом). Второй проезд 142 для передвижения первого робота 200 формируют между полкой 120 временного хранения и стойками ПО, расположенными на одном конце полки 120 временного хранения, и пятый проезд 145 для передвижения первого робота 200 формируют между погрузочно-разгрузочной площадкой 400 и стеллажом 100. Так, пятый проезд 145 для передвижения первого робота 200 формируют между погрузочно-разгрузочной площадкой 400 и стойками 110, расположенными на другом конце полки 120 временного хранения. Таким образом, первый робот 200 может напрямую передвигаться от погрузочно-разгрузочной площадки 400 к первому проезду 141 для первого робота 200 в стеллаже 100 вдоль пятого проезда 145, и может быстро добираться до полки 120 временного хранения, тем самым повышают эффективность взаимодействия.
[87] Согласно одному примеру, пятый проезд 145, первый проезд 141, второй проезд 142, третий проезд 143 и четвертый проезд 144 могут вместе формировать первый контур из проездов для передвижения первого робота 200 (пунктирный контур со стрелками на фиг. 9).
[88] Согласно одному примеру, проход 140 для доступа к грузам под полкой 120 временного хранения может формировать второй контур из проездов (штрихпунктирная линия со стрелками на фиг. 9) для передвижения первого робота 200, по которому передвигается первый робот 200, когда он не нагружен.
[89] Согласно одному примеру, второй проход 310 для робота, предназначенный для второго робота 300 может формировать контур (точечная линия со стрелками на фиг. 9) для передвижения второго робота 300.
[90] В вышеупомянутых примерах за счет организации первого контура из проездов, второго контура из проездов и контура для передвижения второго робота 300 могут предотвращать ситуацию, когда первый робот 200 и второй робот 300 занимают проходы друг друга для перемещения, и тем самым повышают эффективность взаимодействия между этими роботами. Таким образом, некоторое количество первых роботов 200 и некоторое количество вторых роботов 300 могут организовывать для осуществления складских операций с грузами и при этом повышают эффективность складских операций.
[91] В других компонентах складского устройства 1000 из вышеупомянутого примера осуществления в настоящее время и в будущем могут принимать различные технические решения, известные специалистам в данной области техники, которые не описаны подробно в настоящем документе.
[92] Вариант 2 осуществления
[93] На фиг. 10 представлена блок-схема способа управления складскими операциями согласно варианту 2 осуществления настоящего изобретения. Способ управления складскими операциями подходит для складского устройства, которое применяют в упомянутом выше варианте 1 осуществления. Как видно из фиг. 10, способ управления складскими операциями может предусматривать:
[94] стадию S1001: определение заданного местоположения для временного хранения согласно заданному местоположению для хранения заданного груза;
[95] стадию S1002: команду первому роботу на перемещение заданного груза в заданное местоположение для временного хранения; и
[96] стадию S1003: в случае получения сигнала от первого робота о завершении перемещения, команду второму роботу на перемещение заданного груза из заданного местоположения для временного хранения в заданное местоположение для хранения, при этом заданное местоположение для хранения и заданное местоположение для временного хранения находятся на разных полках.
[97] Как видно из фиг. 4, местоположение временного хранения могут организовать на полке 120 временного хранения стеллажа 100, местоположение временного хранения могут организовать на полке 130 хранилища на стеллаже, местоположение временного хранения и местоположение хранения могут организовать на различных уровнях одного и того же стеллажа 100, или могут также организовать его на различных уровнях соседних стеллажей. Местоположение временного хранения и местоположение хранения могут регулировать и выбирать согласно фактическим потребностям, и в вариантах осуществления настоящего изобретения способ расположения местоположения временного хранения и местоположения хранения не ограничены.
[98] Заданное местоположение хранения заданного груза могут определять согласно типу заданного груза. Так, в случае, когда тип заданного груза представляет собой тип груза, пользующийся наибольшим спросом, в качестве заданного местоположения хранения этого заданного груза могут выделять местоположение хранения с самым коротким временем перемещения. Так, в случае, когда местоположение временного хранения организуют на нижнем уровне стеллажа, местоположение хранения с самым коротким временем перемещения представляет собой местоположение хранения, ближайшее к погрузочно-разгрузочной площадке, на уровне, расположенном над уровнем, на котором находится местоположение временного хранения. Таким образом, соответствующее местоположение хранения с самым коротким временем доступа могут определять как заданное местоположение хранения согласно степени спроса на заданный груз.
[99] Согласно одному примеру, поскольку в заданном местоположении временного хранения могут временно хранить заданный груз, второму роботу могут немедленно дать команду на перемещение заданного груза из заданного местоположения временного хранения в заданное местоположение хранения в случае, когда получен сигнал от первого робота о том, что перемещение завершено, или второму роботу могут дать команду на перемещение заданного груза из заданного местоположения временного хранения в заданное местоположение хранения после того, как второй робот завершит другие действия. Таким образом, первый робот и второй робот могут использовать местоположение временного хранения для независимого перемещения заданного груза, и первый робот и второй робот могут высокоэффективно передвигаться без необходимости непосредственного взаимодействия с целью перемещения заданного груза, это повышает эффективность поступления грузов на склад.
[100] В одном примере согласно способу управления складскими операциями заданные местоположения временного хранения могут соответственно определять для заданных местоположений хранения некоторого количества заданных грузов, и некоторому количеству первых роботов дают команду соответственно переместить некоторое количество заданных грузов в соответствующие заданные местоположения временного хранения. В случае получения сигналов о завершении перемещения, отправленных некоторым количеством первых роботов, второму роботу дают команду на перемещение некоторого количества заданных грузов из соответствующих заданных местоположений для временного хранения соответственно в заданные соответствующие местоположения для хранения.
[101] Согласно способу управления складскими операциями по варианту осуществления настоящего изобретения, заданное местоположение временного хранения определяют, исходя из заданного местоположения хранения заданного груза, и первому роботу выдают команду на перемещение заданного груза на временное хранение в заданное местоположение временного хранения и второму роботу дают команду на перемещение заданного груза из местоположения временного хранения соответственно в заданное местоположение хранения, так чтобы разделить наземное перемещение заданного груза между местоположением временного хранения и местоположением хранения, так что первый робот может независимо выполнить наземное перемещение заданного груза, и второй робот может независимо выполнить перемещение заданного груза между местоположением временного хранения и местоположением хранения. У первого робота и второго робота нет необходимости непосредственно погружать-разгружать заданный груз, что позволяет избежать ситуации, когда первый робот и второй робот ожидают друг друга, и это способствует повышению эффективности складских операций с грузами.
[102] Согласно одному сценарию применения, первый робот может представлять собой робота, который за один раз получает доступ к одной коробке с грузом и перемещает ее, он передвигается быстрее и его стоимость ниже, а второй робот может представлять собой робота, который за один раз получает доступ к некоторому количеству коробок с грузом и перемещает их, при этом передвигается медленнее и его стоимость выше. Если первому роботу непосредственно дают команду на перемещение заданного груза с погрузочно-разгрузочной площадки в заданное местоположение хранения и/или второму роботу дают команду на перемещение заданного груза с погрузочно-разгрузочной площадки в заданное местоположение хранения, то первый робот и второй робот могут иметь более низкую эффективность перемещения и более высокие затраты на перемещение из-за перемещения на большие расстояния. Однако согласно способу управления складскими операциями по варианту осуществления настоящего изобретения, первый робот может перемещать грузы между погрузочно-разгрузочной площадкой и местоположением временного хранения, и второй робот может перемещать грузы между местоположением временного хранения и местоположением хранения, что выгодно для сокращения расстояния передвижения первого робота и второго робота с тем, чтобы повысить эффективность складских операций за счет высокоэффективного взаимодействия первого робота и второго робота.
[103] Например, как показано на фиг. 11, работа на стадии S1001: определение заданного местоположения для временного хранения согласно заданному местоположению хранения, может предусматривать:
[104] стадию S1101: определение первого свободного местоположения, ближайшего к заданному местоположению хранения;
[105] стадию S1102: команда первому роботу на передвижение к первому свободному местоположению временного хранения;
[106] стадию S1103: обновление состояния занятости каждого местоположения временного хранения в процессе передвижения первого робота, исходя из заданного временного интервала;
[107] стадию S1104: в случае, когда время передвижения первого робота к первому свободному местоположению временного хранения больше, чем первый заданный порог времени, установление наличия второго свободного местоположения временного хранения, ближайшего к заданному местоположению хранения, согласно обновленному состоянию занятости каждого местоположения временного хранения; и
[108] стадию S1105: при наличии второго свободного местоположения временного хранения, определение второго свободного местоположения временного хранения в качестве заданного второго свободного местоположения временного хранения.
[109] Например, как показано на фиг. 4, в случае, когда местоположение временного хранения, обеспеченное полкой 122 временного хранения в заданном местоположении хранения, предоставляемом полкой 131, занято, могут определять, что местоположение временного хранения, обеспеченное полкой 123 временного хранения, или местоположение временного хранения, обеспеченное полкой 124 временного хранения в соседней стойке заданной полки 131, представляет собой первое свободное местоположение временного хранения, и первому роботу дают команду передвигаться к первому местоположению временного хранения; если местоположение временного хранения, обеспеченное полкой 122 временного хранения, обновляют до свободного состояния в процессе передвижения первого робота, и время, которое требуется первому роботу для передвижения к первому свободному местоположению временного хранения, больше, чем первый заданный порог времени, определяют, что местоположение временного хранения, обеспеченное местоположением 122 временного хранения, представляет собой второе свободное местоположение временного хранения, и его задают в качестве заданного местоположения временного хранения. Таким способом заданное местоположение временного хранения могут динамически регулировать в процессе передвижения первого робота, так что расстояние перемещения между заданным местоположением временного хранения и заданным местоположением хранения меньше, чем расстояние перемещения между первым свободным местоположением временного хранения и заданным местоположением временного хранения, это может сократить расстояние перемещения заданного груза и повысить эффективность поступления груза на склад.
[110] Следует отметить, что местоположения хранения по обе стороны от прохода между соседними стеллажами могут совместно использовать для ряда местоположений временного хранения, то есть, заданное местоположение хранения и заданное местоположение временного хранения могут соответственно располагать на двух соседних стеллажах. Например, как показано на фиг. 12, в случае, когда заданное местоположение хранения располагают выше или ниже пятого местоположения 415 временного хранения на первом стеллаже 410, первое свободное местоположение временного хранения может представлять собой пятое местоположение 415 временного хранения на первом стеллаже 410, и также может представлять собой пятое местоположение 425 временного хранения на втором стеллаже 420. Таким образом, местоположения хранения, расположенные по обе стороны от второго проезда 440 для робота могут совместно использовать местоположение временного хранения на первом стеллаже 410.
[111] Обновление состояния местоположения временного хранения ниже заданного местоположения хранения как свободного, может быть вызвано тем, что второй робот увозит грузы, которые временно хранили в этом местоположении временного хранения.
[112] Согласно одному варианту осуществления, в случае отсутствия второго свободного местоположения временного хранения, первое свободное местоположение временного хранения определяют в качестве заданного местоположения временного хранения. Таким образом, заданное местоположение временного хранения могут определять напрямую согласно заданному местоположению хранения.
[113] Согласно одному варианту осуществления, команда первому роботу на перемещение заданного груза в заданное местоположение временного хранения предусматривает:
[114] определение первого маршрута перемещения по заданному первому проходу для роботов согласно информации о местоположении между первым роботом и заданным местоположением временного хранения, где первый проход для роботов предусматривает первый проезд, расположенный сбоку от уровня временного хранения, на котором находится заданное местоположение временного хранения, и первый проезд расположен в области вертикальной проекции полки хранилища, на которой находится заданное местоположение хранения; и
[115] команду первому роботу на передвижение к нижней части заданного местоположения временного хранения вдоль первого маршрута перемещения.
[116] Например, как показано на фиг. 12, фиг. 12 содержит принципиальную схему сценария способов управления складскими операциями согласно вариантам осуществления настоящего изобретения, где отрезок линии со стрелкой обозначает первый проезд 430, расположенный сбоку от полки временного хранения, на которой расположено заданное местоположение временного хранения (см. первый проезд 141 на фиг. 4). В случае, когда заданное местоположение временного хранения представляет собой пятое местоположение 415 временного хранения на первой полке 410, в первом проезде 430 определяют первый маршрут 431 перемещения, и первому роботу 200 дают команду передвигаться к нижней части пятого местоположения 415 временного хранения по первому маршруту 431 перемещения. Таким образом, первый робот 200 может передвигаться в заданном первом проезде 430 так, что первый робот 200 не занимает проезд второго робота 300, это повышает эффективность передвижения первого робота 200 и второго робота 300 относительно друг друга, тем самым повышают эффективность складских операций.
[117] Согласно одному варианту осуществления, команда второму роботу на перемещение заданного груза из заданного временного местоположения временного хранения в заданное местоположение хранения предусматривает:
[118] определение второго маршрута перемещения по заданному второму проходу для робота согласно информации о местоположении второго робота относительно заданного местоположения временного хранения, где второй проезд для роботов располагают за пределами области вертикальной проекции; и
[119] команду второму роботу на передвижение к боковой части заданного местоположения временного хранения по второму маршруту перемещения.
[120] Например, как показано на фиг. 12, второй проезд 440 для роботов (точечная линия со стрелками) могут располагать за пределами вертикальной проекции стеллажа. В случае, когда второй робот 300 расположен сбоку от второго местоположения 412 временного хранения на первом стеллаже 410, второй маршрут 441 перемещения между стороной второго местоположения 412 временного хранения и стороной пятого местоположения 415 временного хранения определяют согласно информации о местоположении второго робота 300 относительно заданного местоположения временного хранения (а именно, пятого местоположения 415 временного хранения), и второму роботу 300 дают команду на передвижение по второму маршруту 441 перемещения к стороне пятого местоположения 415 временного хранения с тем, чтобы забрать заданный груз с пятого местоположения 415 временного хранения.
[121] Согласно одному варианту осуществления, второй проезд формируют на одном конце полки временного хранения. Полка временного хранения предусматривает некоторое количество полок временного хранения для предоставления местоположений временного хранения, третий проезд формируют по меньшей мере между двумя полками временного хранения, и первый проход для роботов предусматривает второй проезд и третий проезд.
[122] Например, как показано на фиг. 12, один конец первой полки 410, удаленный от погрузочно-разгрузочной площадки 400, формируют вторым проездом 142. Существует третий проезд (не отмеченный на фигуре) между пятым местоположением 415 временного хранения и шестым местоположением 416 временного хранения на первом стеллаже 410, а также между восьмым местоположением 418 временного хранения и девятым местоположением 419 временного хранения на первом стеллаже 410, и тогда первый робот 200 может определять маршрут передвижения по третьему проезду и планировать более короткий маршрут передвижения для первого робота 200, повышая эффективность перемещения первого робота 200.
[123] Согласно одному варианту осуществления, проход для первого робота предусматривает проход для доступа к грузу, расположенный ниже полки временного хранения, и способ дополнительно предусматривает:
[124] в случае, когда первый робот не нагружен, определение незанятого проезда по проходу для первого робота; и
[125] команду первому роботу на передвижение вдоль незанятого проезда.
[126] Например, как показано на фиг. 12, проход для первого робота предусматривает проход 450 для доступа к грузам, расположенный ниже полки временного хранения (см. проход 140 для доступа к грузам на стеллаже 100 на фиг. 4), а именно, штрихпунктирная линия со стрелкой на фиг. 4. В случае, когда первый робот 430 не нагружен (а именно, первый робот не перемещает грузы), первый робот может передвигаться по первому проезду 430, второму проезду и проходу 450 для доступа к грузам.
[127] Вариант 3 осуществления
[128] На фиг. 13 представлена принципиальная схема способа отгрузки со склада согласно варианту 3 осуществления настоящего изобретения. Способ управления складскими операциями по отгрузке подходит для складского устройства, которое применяют в упомянутом выше варианте 1 осуществления. Как видно из фиг. 13, способ управления складскими операциями по отгрузке может предусматривать:
[129] стадию S1301: команду второму роботу на перемещение заданного груза из текущего местоположения для хранения;
[130] стадию S1302: определение заданного местоположения временного хранения согласно местоположению второго робота, при этом текущее местоположение хранения и заданное местоположение временного хранения расположены на разных уровнях;
[131] стадию S1303: команду второму роботу на перемещение заданного груза в заданное местоположение для временного хранения; и
[132] стадию S1304: в случае получения сигнала от второго робота о завершении перемещения, команду первому роботу на перемещение заданного груза из заданного местоположения для временного хранения.
[133] Способ задания местоположения временного хранения и местоположения хранения в способе управления отгрузкой со склада может быть таким же, как способ задания подобных местоположений в способе управления поступлением на склад, и способ задания местоположения временного хранения и местоположения хранения далее в настоящем документе не повторяется.
[134] Текущее местоположение хранения заданного груза могут определять согласно идентификационным данным заданного груза в перечне отгрузки со склада. Например, могут заранее сохранять таблицу взаимного соответствия текущего местоположения хранения заданного груза и идентификационных данных заданного груза. В случае, когда идентификационные данные заданного груза получают из перечня отгрузки со склада, текущее местоположение хранения заданного груза могут запрашивать из таблицы взаимного соответствия. Текущее местоположение хранения заданного груза могут также определять другими способами, и в этом варианте осуществления настоящего изобретения способ определения текущего местоположения хранения заданного груза не ограничен.
[135] Согласно одному примеру, поскольку в заданном местоположении временного хранения могут временно хранить заданный груз, в случае, когда получен сигнал от второго робота о завершении перемещения, первому роботу могут немедленно дать команду на перемещение заданного груза из заданного местоположения временного хранения, либо первому роботу могут также дать команду на перемещение заданного груза из заданного местоположения временного хранения после того, как первый робот завершит выполнение других операций. Таким образом, первый робот и второй робот могут использовать местоположение временного хранения для независимого перемещения заданного груза, и первый робот и второй робот могут с высокой эффективностью передвигаться без необходимости непосредственного взаимодействия для перемещения заданного груза, это может повысить эффективность отгрузки грузов со склада.
[136] В одном примере согласно способу управления отгрузкой со склада, второму роботу могут давать команду на перемещение некоторого количества заданных грузов соответственно из текущих местоположений хранения некоторого количества заданных грузов, и согласно местоположению второго робота соответственно определяют соответствующие заданные местоположения временного хранения и второму роботу дают команду на перемещение заданного груза в соответствующее заданное местоположение временного хранения. Таким способом некоторое количество заданных грузов могут перемещать в соответствующие заданные местоположения временного хранения.
[137] Согласно способу управления отгрузкой со склада по варианту осуществления настоящего изобретения, заданное местоположение временного хранения определяют, исходя из местоположения второго робота, и второму роботу дают команду на перемещение заданного груза в заданное местоположение временного хранения и первому роботу соответственно дают команду на перемещение заданного груза из заданного местоположения временного хранения, чтобы отделить перемещение заданного груза между местоположением временного хранения и местоположением хранения от наземного перемещения заданного груза, так что второй робот может независимо завершить перемещение заданного груза между местоположением хранения и местоположением временного хранения, и первый робот может независимо завершить перемещение заданного груза из местоположения временного хранения. У первого робота и второго робота нет необходимости непосредственно погружать-разгружать заданный груз, что позволяет избежать ситуации, когда первый робот и второй робот ожидают друг друга, и это способствует повышению эффективности отгрузки грузов со склада.
[138] Следует отметить, что робот с подъемным механизмом и механизмом доступа обычно используют в способах управления складскими операциями с целью перемещения грузов и доступа к грузам; однако в силу высокой стоимости такого робота и относительно больших расстояний между погрузочно-разгрузочной площадкой для грузов и каждым местоположением временного хранения и каждым местоположением хранения на стеллаже, затраты на складские операции с грузами в единицу времени относительно высоки, а эффективность относительно мала.
[139] Согласно способам управления складскими операциями по вариантам осуществления настоящего изобретения, наземное перемещение заданных грузов отделяют от перемещения заданных грузов между местоположением временного хранения и местоположением хранения, чтобы первый робот мог сосредоточиться на завершении наземного перемещения заданных грузов, а второй робот мог сосредоточиться на завершении перемещения заданных грузов между местоположением временного хранения и местоположением хранения, при этом первый робот может не иметь подъемного механизма и его стоимость существенно ниже, чем стоимость второго робота. Таким образом, одного второго робота могут использовать для прямого взаимодействия с некоторым количеством первых роботов с целью управления складскими операциями с заданными грузами, это может снизить затраты на складские операции с заданными грузами в единицу времени и может повысить эффективность складских операций и емкость складских помещений для отгрузки и поступления грузов.
[140] Согласно одному варианту осуществления, скорость передвижения первого робота выше скорости перемещения второго робота.
[141] Поскольку при управлении отгрузкой со склада первый робот обычно перемещает заданный груз из заданного местоположения временного хранения на стеллаже на погрузочно-разгрузочную площадку, и второй робот обычно перемещает заданный груз из текущего местоположения хранения в заданное местоположение временного хранения на одной стороне стеллажа, и расстояние между погрузочно-разгрузочной площадкой и стеллажом существенно больше длины стеллажа, то предусматривая скорость передвижения первого робота, которая больше скорости перемещения второго робота, количество заданных грузов, перемещенных вторым роботом в заданное местоположение временного хранения, могут согласовывать с количеством заданных грузов, перемещенных первым роботом из заданного местоположения временного хранения, таким образом эффективность перемещения второго робота согласуют с эффективностью перемещения второго робота, тем самым повышают эффективность отгрузки заданных грузов со склада.
[142] В одном примере согласно способу управления поступлением на склад могут обеспечить взаимодействие некоторого количества первых роботов со вторым роботом, чтобы согласовать поток отгрузки заданных грузов временного хранения с потоком хранения.
[143] Например, как показано на фиг. 14, работа на стадии S1302: определение заданного местоположения для временного хранения согласно местоположению второго робота, может предусматривать:
[144] стадию S1401: определение первого свободного местоположения, ближайшего к местоположению второго робота;
[145] стадию S1402: команду второму роботу на передвижение к первому свободному местоположению для временного хранения;
[146] стадию S1403: обновление состояния занятости каждого местоположения для временного хранения, исходя из заданного временного интервала, в процессе передвижения второго робота;
[147] стадию S1404: в случае, когда время передвижения второго робота к первому свободному местоположению временного хранения больше, чем второй заданный порог времени, установление наличия второго свободного местоположения временного хранения, ближайшего ко второму роботу, согласно обновленному состоянию занятости каждого местоположения временного хранения; и
[148] стадию S1405: при наличии второго свободного местоположения временного хранения, определение второго свободного местоположения временного хранения в качестве заданного второго свободного местоположения временного хранения.
[149] Например, как показано на фиг. 12, в случае, когда второй робот 300 расположен с одной стороны второго местоположения 412 временного хранения на первом стеллаже 410, пятое местоположение 415 временного хранения на первом стеллаже 410 могут определять как первое свободное местоположение временного хранения для второго робота 300; если состояние занятости четвертого местоположения 414 временного хранения на первом стеллаже 410 обновляют до состояния свободного в процессе передвижения второго робота 300 к первому свободному местоположению временного хранения, в случае, когда время передвижения второго робота 300 к пятому местоположению 415 временного хранения больше, чем второй заданный порог времени, четвертое местоположение 414 временного хранения определяют как второе свободное местоположение временного хранения, ближайшее ко второму роботу 300, и определяют как заданное местоположение временного хранения. Таким образом, во время перемещения заданных грузов вторым роботом 300, местоположение хранения могут динамически регулировать, чтобы сократить расстояние перемещения вторым роботом 300 и повысить эффективность отгрузки грузов со склада.
[150] Обновление состояния местоположения временного хранения ниже заданного местоположения хранения как свободного, может быть вызвано тем, что первый робот забирает грузы, которые временно хранили в этом местоположении временного хранения.
[151] Согласно одному варианту осуществления, в случае отсутствия второго свободного местоположения временного хранения, первое свободное местоположение временного хранения определяют в качестве заданного местоположения временного хранения с целью прямого определения заданного местоположения временного хранения.
[152] Согласно одному варианту осуществления, команда первому роботу на перемещение заданного груза из заданного местоположения временного хранения предусматривает:
[153] определение маршрута изъятия по заданному первому проходу для роботов согласно информации о местоположении между первым роботом и заданным местоположением временного хранения, где первый проход для роботов предусматривает первый проезд, расположенный сбоку от уровня временного хранения, на котором расположено заданное местоположение временного хранения, и первый проезд расположен в области вертикальной проекции полки хранилища, на которой расположено заданное местоположение хранения; и
[154] команду первому роботу на передвижение к нижней части заданного местоположения временного хранения вдоль маршрута изъятия.
[155] Например, как показано на фиг. 12, в случае, когда первый робот 200 находится в местоположении рядом с восьмым местоположением 428 временного хранения в первом проезде второго стеллажа 420, и местоположение временного хранения представляет собой пятое местоположение 425 временного хранения на втором стеллаже 420, маршрут 432 изъятия между первым роботом 200 и пятым местоположением 425 временного хранения на втором стеллаже 420 определяют согласно информации о местоположении между первым роботом 200 и заданным местоположением временного хранения (а именно, пятым местоположением 425 временного хранения на втором стеллаже), и первому роботу 200 дают команду на передвижение по маршруту 432 изъятия к нижней стороне местоположения временного хранения (а именно, пятого местоположения 425 временного хранения на втором стеллаже) с целью перемещения заданного груза из заданного местоположения временного хранения.
[156] Вариант 4 осуществления
[157] На фиг. 15 представлена структурная блок-схема складской системы согласно варианту 4 осуществления настоящего изобретения. Как видно из фиг. 15 и фиг. 16, складская система 1500 предусматривает: складское устройство 1000 согласно любому из вышеупомянутых вариантов осуществления; устройство 1510 управления, предусматривающее процессор 1512 и запоминающее устройство 1511, при этом на запоминающем устройстве 1511 хранят команды, и при загрузке и исполнении этих команд процессором 1512, осуществляют способ согласно любому из вышеупомянутых вариантов осуществления; первого робота 200, передвигающегося по первому проходу для роботов и имеющего раздвоенный манипулятор, взаимодействующий с двойной прорезью; и второго робота 300, передвигающегося по второму проходу для роботов.
[158] Согласно одному варианту осуществления, скорость передвижения первого робота 200 выше скорости перемещения второго робота 300.
[159] На фиг. 16 представлена структурная блок-схема устройства управления согласно варианту 4 осуществления настоящего изобретения. Как видно из фиг. 16, устройство 1510 управления предусматривает: запоминающее устройство 1511 и процессор 1512, при этом выполняемую на процессоре компьютерную программу 1512 хранят на запоминающем устройстве 1511. При выполнении компьютерной программы процессор 1512 осуществляет способ управления поступлением на склад и способ управления отгрузкой со склада согласно вышеупомянутым вариантам осуществления. Могут предусматривать одно или несколько запоминающих устройств 1511 и процессоров 1512.
[160] Устройство управления дополнительно предусматривает: интерфейс 1513 связи, который используют для обмена информацией с внешним устройством и выполнения интерактивной передачи данных.
[161] Если запоминающее устройство 1511, процессор 1512 и интерфейс 1513 связи реализованы независимо, запоминающее устройство 1511, процессор 1512 и интерфейс 1513 связи могут подключать друг к другу и они могут обмениваться информацией друг с другом посредством шины. Шина может представлять собой шину Industry Standard Architecture (ISA), шину Peripheral Component Interconnect (PCI), шину Extended Industry Standard Architecture (EISA) и т.п. Шина может предусматривать адресную шину, шину передачи данных, шину управления и т.п.Для простоты представления шины на фиг. 16 показана только одна жирная линия, но это не означает, что предусмотрена только одна шина или шины только одного типа.
[162] При необходимости, если запоминающее устройство 1511, процессор 1512 и интерфейс 1513 связи объединены на одной микросхеме, запоминающее устройство 1511, процессор 1512 и интерфейс 1513 связи могут обмениваться информацией друг с другом посредством внутреннего интерфейса.
[163] Вышеупомянутый процессор может представлять собой центральный процессор (CPU) и также могут быть предусмотрены другие универсальные процессоры, цифровой обработчик сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем логическая матрица (FPGA) или другие программируемые логические устройства, устройство со схемой на дискретных компонентах или транзисторными логическими схемами, компонента дискретных аппаратных средств и т.п. Универсальный процессор может представлять собой микропроцессор или любой обычный процессор. Следует отметить, что процессор может представлять собой процессор, который поддерживает архитектуру усложненного компьютера с сокращенным набором команд (усложненных устройств с RISK-архитектурой - ARM).
[164] При необходимости вышеупомянутое запоминающее устройство может предусматривать область хранения программ и область хранения данных, при этом в области хранения программ могут хранить операционную систему и прикладную программу, которая требуется по меньшей мере для одной функции; и в области хранения данных могут хранить данные, созданные в соответствии с использованием устройства управления и т.п. Кроме того, запоминающее может предусматривать оперативную память с высоким быстродействием и может дополнительно предусматривать энергонезависимое запоминающее устройство, например, по меньшей мере, одно дисковое запоминающее устройство, флеш-память или другие энергонезависимые твердотельные запоминающие устройства. Согласно некоторым вариантам осуществления, запоминающее устройство может при необходимости предусматривать накопитель данных, расположенный удаленно по отношению к процессору, и эти удаленные накопители данных могут подключать к устройству управления посредством сети. Примеры упомянутой выше сети могут включать в себя, помимо прочего, Интернет, интранет, локальную сеть, сеть мобильной связи и их сочетания.
[165] Вариант 5 осуществления
[166] Вариант 5 осуществления настоящего изобретения дополнительно предусматривает погрузочно-разгрузочную площадку, применимую к складскому устройству любого из вышеописанных вариантов осуществления. Погрузочно-разгрузочная площадка ниже рассмотрена подробно, со ссылкой на прилагаемые фигуры.
[167] Как видно из фиг. 17, шасси 910 первого робота (первый робот можно называть трансферным роботом) обычно оснащают передним направляющим колесом 911, задним направляющим колесом 912 и приводными колесами 913, при этом переднее направляющее колесо 911 и заднее направляющее колесо 912 соответственно располагают в передней и задней частях шасси 910 с целью изменения направления передвижения первого робота; и приводные колеса 913 располагают на обеих сторонах шасси 910, они соединены с шасси 910 при помощи механизма подвески (не показан на чертеже) с целью обеспечения приводного усилия для первого робота. В случае, когда первый робот передвигается к углублению, приводные колеса 913 могут растягивать механизм подвески; и в случае, когда первый робот передвигается к возвышенности, приводные колеса 913 могут сжимать механизм подвески, чтобы смягчить воздействие на корпус первого робота, вызванное неровным полом. Следует отметить, что для упрощения чертежей, в варианте осуществления настоящего изобретения переднее направляющее колесо 911, заднее направляющее колесо 912, приводные колеса 913 и шасси 910 первого робота используют для иллюстрации передвижения первого робота.
[168] Как видно из фиг. 18, поскольку наклонная поверхность 1121 наклонной площадки 1120 погрузочно-разгрузочной площадки 1100 представляет собой плоскость, и приводные колеса 913 первого робота имеют относительно небольшой диапазон растяжения или сжатия относительно шасси 910, приводные колеса 913 располагают практически в одной плоскости с передним направляющим колесом 911 и задним направляющим колесом 912. В случае, когда первый робот начинает подниматься по наклонной площадке, переднее направляющее колесо 911 первого робота передвигается к наклонной поверхности 1121, а заднее направляющее колесо 912 передвигается по полу 1130. Если наклонная площадка 1120 имеет относительно большую крутизну, задняя часть шасси 910 поднимается выше относительно пола, это легко приводит к тому, что приводные колеса 913 повисают в воздухе и не могут обеспечить сцепление с наклонной поверхностью 1121, или приводные колеса 913 могут контактировать с наклонной поверхностью 1121, но не могут обеспечить достаточное сцепление с наклонной поверхностью 1121 из-за недостаточного давления. Это приводит к проскальзыванию приводных колес 913 первого робота, так что первый робот не может передвигаться по наклонной площадке 1120 к основной части площадки 1110. Чтобы обеспечить достаточное сцепление приводных колес 913 первого робота с наклонной поверхностью 1121 наклонной площадки 1120, крутизну наклонной площадки 1120 обычно уменьшают за счет увеличения длины наклонной площадки, это может потребовать больше материалов для изготовления и больше места для размещения, поэтому возникают проблемы, связанные с тем, что погрузочно-разгрузочная площадка 1100 имеет высокую стоимость изготовления и занимает много места.
[169] Исходя из этого, вариант 2 осуществления настоящего изобретения предусматривает погрузочно-разгрузочную площадку. Наклонную поверхность наклонной площадки по направлению от основания наклонной поверхности к верхнему краю наклонной поверхности задают в форме вогнутой наклонной поверхности и выгнутой наклонной поверхности, которые плавно соединены друг с другом, это дает преимущество в виде сокращения длины наклонной площадки и может снизить стоимость изготовления и уменьшить занимаемое место.
[170] На фиг. 19А представлена первая принципиальная схема погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения, на фиг. 19В представлен вид сверху первой принципиальной схемы погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения, и на фиг. 19С представлен вид сбоку первой принципиальной схемы погрузочно-разгрузочной площадки согласно варианту 5 осуществления настоящего изобретения.
[171] Как видно из фиг. с 15А до фиг. 15С, погрузочно-разгрузочная площадка 1200 может предусматривать: основную часть 1210 площадки и наклонную площадку 1220. Наклонная поверхность 1220А наклонной площадки 1220 предусматривает вогнутую наклонную поверхность 1221 и выпуклую наклонную поверхность 1222, расположенные в направлении от основания наклонной поверхности к ее верхнему краю. Верхний край вогнутой наклонной поверхности 1221 плавно соединен с нижним краем выпуклой наклонной поверхности 1222; и наклонную площадку 1220 располагают по одну сторону основной части 1210 площадки, так что наклонная поверхность 1220А плавно переходит в верхнюю поверхность 1211 основной части 1210 площадки.
[172] Например, основная часть 1210 площадки может иметь некоторую трехмерную форму, например, параллелограмм или куб. Верхняя поверхность 1211 основной части 1210 площадки может формировать проезд первого робота, например, проезд могут предусматривать вдоль длинной стороны основной части 1210 площадки. Поскольку основная часть 1210 площадки имеет определенную высоту, в случае, когда первый робот передвигается на верхнюю поверхность 1211, пользователю удобно выполнять операцию по перемещению перевозимых грузов. Высоту основной части 1210 площадки могут выбирать и регулировать согласно фактическим потребностям, что не ограничено в этом варианте осуществления настоящего изобретения.
[173] Согласно одному примеру, наклонная поверхность 1220А наклонной площадки 1220 предусматривает вогнутую наклонную поверхность 1221 и выпуклую наклонную поверхность 1222, расположенные друг за другом в направлении от основания наклонной поверхности к ее верхнему краю. Для обеспечения плавного соединения верхний край вогнутой наклонной поверхности 1221 представляет собой касательную к нижнему краю выпуклой наклонной поверхности 1222.
[174] При необходимости, как видно из фиг. 20А, нижний край наклонной поверхности 1221 может представлять собой касательную к полу, так что крутизну вогнутой наклонной поверхности 1221 могут постепенно увеличивать, начиная с 0°; и верхний край выпуклой наклонной поверхности 1222 может представлять собой касательную к верхней поверхности 1211 основной части 1210 площадки, так что крутизну выпуклой наклонной поверхности 1222 постепенно уменьшают до 0°.
[175] В частности, вогнутую наклонную поверхность 1221 располагают у нижней стороны наклонной поверхности наклонной площадки 1220, и она вогнута в направлении к нижней поверхности 1220 В наклонной площадки 1220. Крутизну вогнутой наклонной поверхности 1221 постепенно увеличивают с 0° в направлении от основания наклонной поверхности к ее верхнему краю и увеличивают до заданного значения крутизны наверху вогнутой наклонной поверхности 1221. Другими словами, величину наклона вогнутой наклонной поверхности 1221 постепенно увеличивают по направлению вверх вдоль вогнутой наклонной поверхности 1221. Таким образом, крутизну наклонной площадки 1220 у основания наклонной поверхности могут постепенно увеличивать, это дает преимущество в виде уменьшения длины наклонной площадки 1220 со стороны основания наклонной поверхности, и сокращения стоимости изготовления.
[176] Выпуклую наклонную поверхность 1222 располагают у верхней стороны наклонной площадки 1220, и она выгнута в направлении от нижней поверхности 1220 В наклонной площадки 1220. Крутизну выпуклой наклонной поверхности 1222 постепенно уменьшают с заданного значения крутизны наклона вдоль направления от основания наклонной поверхности к ее верхнему краю, и она плавно переходит в верхнюю поверхность 1211 наклонной площадки 1220 у верхнего края выпуклой наклонной поверхности 1222. Другими словами, величину наклона выпуклой наклонной поверхности 1222 постепенно уменьшают по направлению вверх вдоль выпуклой наклонной поверхности 1222. Таким образом, могут обеспечивать плавный переход от вогнутой наклонной поверхности 1221 к выпуклой наклонной поверхности 1222 и к основной части 1210 площадки, так чтобы первый робот мог плавно передвигаться по наклонной площадке 1220 и основной части 1210 площадки; и также могут уменьшать длину наклонной площадки 1220 со стороны верхнего края наклонной поверхности с целью сокращения стоимости изготовления.
[177] Как видно из фиг. 19С и фиг. 20А, в процессе передвижения первого робота вдоль наклонной площадки 1220 к основной части 1210 площадки в случае, когда переднее направляющее колесо 911 первого робота передвигается по вогнутой наклонной поверхности 1221, а заднее направляющее колесо 912 все еще передвигается по полу 410, вогнутая наклонная поверхность 1221 может уменьшать высоту подъема передней части шасси 910 относительно пола 410 с тем, чтобы предотвратить избыточный подъем приводных колес 913, так что приводные колеса 913 могут прикладывать приводное усилие к вогнутой наклонной поверхности 1221, и таким образом предотвращают проскальзывание приводных колес 913.
[178] Как видно из фиг. 19С и фиг. 20В, в случае, когда переднее направляющее колесо 911 и заднее направляющее колесо 912 первого робота передвигаются по вогнутой наклонной поверхности 1221, приводные колеса 913 несколько растягивают механизм подвески, так что центры приводных колес 913 немного смещены вниз относительно шасси 910, и приводные колеса 913 могут обеспечивать приводное усилие на вогнутой наклонной поверхности 1221, причем это усилие достаточно для того, чтобы привести первого робота в движение по направлению к выпуклой наклонной поверхности 1222.
[179] Как видно из фиг. 19С, фиг. 20С и фиг. 20D, в случае, когда приводные колеса 913 первого робота приводят в движение переднее направляющее колесо 911 для передвижения по выпуклой наклонной поверхности 1222 и приводят в движение заднее направляющее колесо 912 для передвижения с вогнутой наклонной поверхности 1221 на выпуклую наклонную поверхность 1222, центры приводных колес 913 постепенно передвигаются в направлении, близком к шасси 910, и начинают сжимать механизм подвески; в случае, когда и переднее направляющее колесо 911 и заднее направляющее колесо 912 первого робота передвигаются по выпуклой наклонной поверхности 1222, приводные колеса 913 несколько сжимают механизм подвески, так что приводные колеса 913 могут обеспечивать приводное усилие на выпуклой наклонной поверхности 1222, которое достаточно для того, чтобы привести первого робота в движение по направлению к основной части 1210 площадки.
[180] Как видно из фиг. 19С и фиг. 20Е, в случае, когда приводные колеса 913 первого робота приводят в движение переднее направляющее колесо 911 для передвижения по основной части 1210 площадки и приводят в движение заднее направляющее колесо 912 для передвижения с выпуклой наклонной поверхности 1222 на основную часть 1210 площадки, центры приводных колес 913 постепенно передвигаются в направлении близком к шасси 910 под действием силы упругости механизма подвески. Поскольку выпуклая наклонная поверхность 1222 плавно переходит в верхнюю поверхность 1211 основной части 1210 площадки, можно избежать ситуации, когда приводные колеса 913 не могут обеспечить достаточное приводное усилие на выпуклой наклонной поверхности 1222 из-за слишком сильного сжатия механизма подвески.
[181] Согласно одному варианту осуществления, на фиг. 19С проекция вогнутой наклонной поверхности 1221 на вертикальную плоскость представляет собой первую дугу (относящуюся к вогнутой наклонной поверхности 1221 на фиг. 19С), и проекция выпуклой наклонной поверхности 1222 на вертикальную плоскость представляет собой вторую дугу (относящуюся к выпуклой наклонной поверхности 1222 на фиг. 19С); и радиус первой дуги больше или равен радиусу второй дуги. Например, радиус первой дуги может находиться в диапазоне от 8000 мм до 10700 мм, радиус второй дуги может находится в диапазоне от 500 мм до 2832 мм, и радиусы первой и второй дуги могут выбирать и регулировать согласно фактическим потребностям, что не ограничено в этом варианте осуществления настоящего изобретения.
[182] Согласно этому варианту осуществления, при задании радиуса первой дуги большим или равным радиусу второй дуги, крутизна вогнутой наклонной поверхности 1221 может быть такой же, как крутизна выпуклой наклонной поверхности 1222, или крутизна вогнутой наклонной поверхности 1221 несколько меньше, чем крутизна выпуклой наклонной поверхности 1222, что благоприятно для плавного передвижения первого робота по вогнутой наклонной поверхности 1221 и выпуклой наклонной поверхности 1222.
[183] Согласно одному варианту осуществления, длина первой дуги равна длине второй дуги или превышает ее. Длину первой дуги и длину второй дуги могут выбирать и регулировать согласно фактическим потребностям, что не ограничено в этом варианте осуществления настоящего изобретения.
[184] Согласно одному варианту осуществления, как показано на фиг. 19А и фиг. 19С, погрузочно-разгрузочная площадка 1200 может дополнительно предусматривать некоторое количество поддерживающих опор 1230, и некоторое количество поддерживающих опор 1230 располагают под наклонной площадкой 1220 на некотором расстоянии друг от друга вдоль длинной стороны наклонной площадки 1220.
[185] Согласно одному примеру, наклонная площадка 1220 и некоторое количество поддерживающих опор 1230 могут представлять собой единое целое или отдельные части; если наклонная площадка 1220 и некоторое количество поддерживающих опор 1230 представляют собой отдельные части, наклонную площадку 1220 и некоторое количество поддерживающих опор 1230 могут объединять в единое целое.
[186] Согласно одному примеру, поддерживающих опор 1230 может быть три, и эти три поддерживающие опоры 1230 соответственно располагают в передней части, средней части и задней части основания наклонной площадки 1220.
[187] Согласно этому варианту осуществления, некоторое количество поддерживающих опор 1230 располагают в основании наклонной площадки 1220 в продольном направлении наклонной площадки 1220 на некотором расстоянии друг от друга, так что наклонная площадка 1220 может быть приподнята, и между соседними поддерживающими опорами 1230 может быть образован арочный пролет. Таким образом, основание поддерживающих опор 1230 может соприкасаться с полом с тем, чтобы уменьшить площадь соприкосновения основания наклонной площадки 1220 и пола, предотвратить покачивание наклонной площадки 1220 из-за неровности пола, так что наклонную площадку 1220 могут устойчиво устанавливать на полу.
[188] Согласно одному варианту осуществления, как показано на фиг. с 19А до фиг. 19С, погрузочно-разгрузочная площадка 1200 может дополнительно предусматривать отбойник 1240. Отбойник 1240 устанавливают наверху основной части 1210 площадки и располагают на стороне основной части 1210 дальней от наклонной площадки 1220. Например, отбойник 1240 могут устанавливать сбоку на верхней поверхности 1211 основной части 1210 площадки на стороне основной части 1210 дальней от наклонной площадки 1220. Отбойник 1240 и основная часть 1210 площадки могут представлять собой единое целое или отдельные части. Отбойник 1240 могут устанавливать с целью защиты первого робота и предотвращения падения первого робота со стороны основной части 1210 дальней от наклонной площадки 1220.
[189] Согласно одному варианту осуществления, как показано на фиг. 21, на боковой стенке основной части 1210 площадки напротив наклонной площадки 1220 предусматривают зажимной паз 1410, а на боковой стенке наклонной площадки 1220 напротив основной части 1210 площадки предусматривают зажимную планку (не показана на рисунке), и зажимную планку фиксируют в зажимном пазе 1410, таким образом наклонную площадку 1220 присоединяют к основной части 1210 площадки.
[190] Согласно этому варианту осуществления, зажимной паз 1410 располагают на основной части 1210 площадки и зажимную планку располагают на наклонной площадке 1220, так что основная часть 1210 площадки и наклонная площадка 1220 могут объединять в единое целое, это удобно для сборки, разборки, транспортировки, хранения и пр. Понятно, что основную часть 1210 площадки и наклонную площадку 1220 могут также устанавливать как единое целое согласно фактическим потребностям, и в этом варианте осуществления настоящего изобретения вид конструкции основной части 1210 площадки и наклонной площадки 1220 не ограничен.
[191] Согласно одному варианту осуществления, зажимной паз 1410 размещают по длинной стороне основной части 1210 площадки, а зажимную планку размещают в торце наклонной площадки 1220; предусмотрены по меньшей мере две наклонные площадки 1220 и зажимные планки двух наклонных площадок 1220 подвижны в направлении вдоль зажимного паза 1410 с тем, чтобы регулировать расстояние между ними.
[192] Согласно одному примеру, зажимной паз 1410 размещают по длинной стороне основной части 1210 площадки и располагают на боковой стенке напротив наклонной площадки 1220; зажимную планку размещают вдоль торца наклонной площадки 1220 и располагают на боковой стенке напротив основной части 1210 площадки; зажимная планка подвижна в направлении вдоль зажимного паза 1410 и таким образом могут регулировать местоположение наклонной площадки 1220 у основной части 1210 площадки для большего удобства при выборе места присоединения наклонной площадки 1220.
[193] Согласно одному примеру, для передвижения первого робота на полу могут устанавливать метку дорожки, и в случае, когда имеется по меньшей мере две наклонные площадки 1220, зажимные планки наклонной площадки 1220 скользят вдоль зажимного паза 1410 основной части 1210 площадки, чтобы отрегулировать расстояние между наклонными площадками 1220 с тем, чтобы выровнять наклонные площадки 1220 относительно меток дорожки и чтобы первый робот мог передвигаться к наклонной площадке 1220 вдоль метки дорожки. Кроме того, расстояние между наклонными площадками 1220 могут также регулировать согласно размеру груза, который перемещает робот, так что расстояние между наклонными площадками 1220 регулируют согласно размеру этого груза. Следует отметить, что количество наклонных площадок 1220 могут выбирать и регулировать согласно фактическим потребностям, и в настоящем изобретении количество наклонных площадок 1220 не ограничено.
[194] Согласно одному варианту осуществления, как показано на фиг. 19В и фиг. 19С, верхняя поверхность 1211 основной части 1210 площадки образует проезд, и наклонные поверхности 1220А двух наклонных площадок 1220 соответственно образуют путь въезда и путь выезда; верхние части пути въезда и пути выезда соответственно соединяют с проездами (линии со стрелками на чертеже указывают направления передвижения по пути въезда, проезду и пути выезда). Таким образом, первый робот может передвигаться по пути въезда до проезда на основной части 1210 площадки, и передвигаться по проезду до пути выезда и затем передвигаться по пути выезда, это может повысить эффективность перемещения груза.
[195] Согласно одному примеру, имеется три наклонных площадки 1220, наклонные поверхности 1220А двух наклонных площадок 1220 могут задавать в качестве двух путей въезда, а наклонную поверхность 1220А другой наклонной площадки 1220 в качестве пути выезда. Верхние части путей въезда и пути выезда соответственно соединяют с проездом. Количество путей въезда и выезда могут выбирать и регулировать согласно фактическим потребностям, что не ограничено в этом варианте осуществления настоящего изобретения.
[196] Согласно одному варианту осуществления, ширина основной части 1210 площадки больше ширины наклонной площадки 1220, так что первый робот перемещает на основную часть 1210 площадки груз большего размера.
[197] Согласно одному варианту осуществления, как показано на фиг. с 19А до фиг. 19С и фиг. 22, кронштейн 1511 площадки, адаптированный под форму основной части 1210 площадки, располагают внутри основной части 1210 площадки, а кронштейн 1521 наклонной части, адаптированный под форму наклонной площадки 1220, располагают внутри наклонной площадки 1220.
[198] В одном примере для кронштейна 1511 площадки предусмотрена опорная плита 1512 для формирования основной части 1210 площадки, и для кронштейна 1521 наклонной площадки 1220 предусмотрена опорная плита 1522 площадки для формирования наклонной площадки 1220.
[199] На фиг. 23 представлена принципиальная схема рабочего места согласно варианту 5 осуществления настоящего изобретения. Как видно из фиг. 23, рабочее место 1600 может предусматривать: некоторое количество погрузочно-разгрузочных площадок 1200 согласно любому из вышеупомянутых вариантов осуществления, и некоторое количество погрузочно-разгрузочных площадок 1200 располагают вдоль длинной стороны основной части 1210 площадки, так что задействуют верхние поверхности 1211 некоторого количества основных частей 1210 площадок. Таким образом, первому роботу удобно передвигаться по верхним поверхностям 1211 некоторого количества основных частей 1210 площадок, и возможно легко конфигурировать путь въезда и путь выезда.
[200] В отношении других компонент погрузочно-разгрузочной площадки 1200 и рабочего места 1600 из вышеупомянутых примеров осуществления в настоящее время и в будущем могут принимать различные технические решения, известные специалистам в данной области техники, которые не описаны подробно в настоящем документе.
[201] В соответствии с погрузочно-разгрузочной площадкой 1200 и рабочим местом 1600 согласно настоящего изобретения, наклонную поверхность 1220А наклонной площадки 1220 задают как вогнутую наклонную поверхность 1221 и выпуклую наклонную поверхность 1222 вдоль направления от основания наклонной поверхности к верхней ее части, и вогнутую наклонную поверхность 1221 плавно соединяют с верхней поверхностью 1222, и наклонную поверхность 1220А плавно соединяют с верхней поверхностью 1211 основной части 1210 площадки, это дает преимущество в виде уменьшения длины наклонной площадки 1220 и может снизить стоимость изготовления и уменьшить занимаемое место.
[202] В настоящем описании изобретения следует понимать, что термины «центр», «продольный», «поперечный», «длина», «ширина», «толщина», «вверх», «вниз», «передний», «задний», «левый», «правый», «вертикальный», «горизонтальный», «верх», «низ», «внутренний», «наружный», «по часовой стрелке», «против часовой стрелки», «осевой», «радиальный», «кольцевой» и т.п. указывают на ориентации или взаимные расположения, исходя из ориентаций и взаимных расположений, показанных на фигурах, которые предназначены только для простоты описания настоящего изобретения и упрощения описания, эти термины не указывают и не подразумевают, что указанное устройство или элемент должны иметь конкретную ориентацию, должны быть сконфигурированы и должны работать в конкретной ориентации, и поэтому их нельзя рассматривать как ограничение настоящего описания изобретения.
[203] Кроме того, термины «первый» и «второй» использованы только для целей описания, их не следует понимать как указывающие или подразумевающие относительную важность или косвенно указывающие на количество указанных технических признаков. Таким образом, признаки, описанные как «первый» или «второй» могут явно или неявно содержать один или несколько признаков. В описании настоящего изобретения «некоторое количество» означает два или более, если прямо не указано иное.
[204] В настоящем описании изобретения, если иное специально не определено и не ограничено, термины «установлен», «соединен», «подключен», «прикреплен» и т.п следует рассматривать в широком смысле, например, возможно неподвижное соединение, разъемное соединение или целое; возможно механическое соединение, электрическое соединение или средство связи; возможна прямая связь или косвенная связь через посредника, и возможно внутреннее соединение между двумя элементами или взаимодействие между двумя элементами. Специалисты в данной области техники могут понимать конкретные значения вышеупомянутых терминов в настоящем описании изобретения в зависимости от конкретных обстоятельств.
[205] В настоящем описании изобретения, если иное специально не определено и не ограничено, указание на то, что первый элемент находится «выше» или «ниже» второго элемента может предусматривать прямой контакт первого элемента и второго элемента, и также может предусматривать не прямой контакт, а косвенный контакт первого элемента и второго элемента посредством некоторых других элементов между ними. Кроме того, если указано, что первый элемент находится «выше», «над» или «вверху» второго элемента, это предусматривает нахождение первого элемента непосредственно над и выше наискосок от второго элемента, или просто означает, что высота первого элемента относительно горизонтали больше, чем высота второго элемента. Кроме того, если указано, что первый элемент находится «ниже», «под» или «снизу» второго элемента, это предусматривает нахождение первого элемента непосредственно под и ниже наискосок от второго элемента, или просто означает, что высота первого элемента относительно горизонтали меньше, чем высота второго элемента.
[206] Приведенное выше описание изобретения предусматривает множество различных вариантов осуществления или примеров реализации различных конструкций настоящего изобретения. Для упрощения описания настоящего изобретения выше описаны компоненты и параметры конкретных примеров. Они безусловно представляют собой только примеры и не преследуют цели ограничить настоящее изобретения. Кроме того, в настоящем описании изобретения в различных примерах на фигурах могут встречаться повторяющиеся позиции и/или буквенные обозначения, и это повторение предназначено для упрощения и ясности и не указывает на взаимосвязи между различными вариантами осуществления и/или обсуждаемыми параметрами.
[207] Описание выше представляет собой лишь конкретные варианты осуществления настоящего изобретения, и объем охраны настоящего изобретения не ограничен этим описанием. Любой специалист в данной области техники легко может придумать варианты или замены в пределах объема раскрываемой технологии настоящего изобретения, на которую распространяется объем охраны настоящего изобретения. Таким образом, объем охраны настоящего изобретения должен регулироваться объемом защиты формулы изобретения.
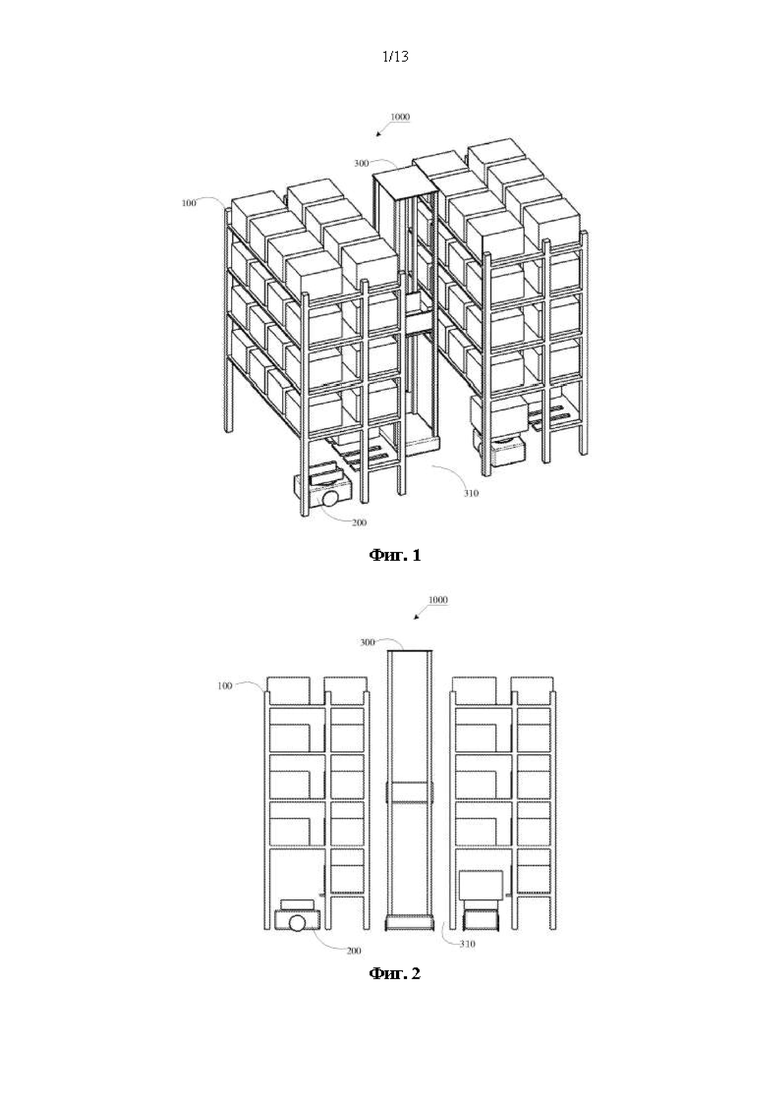
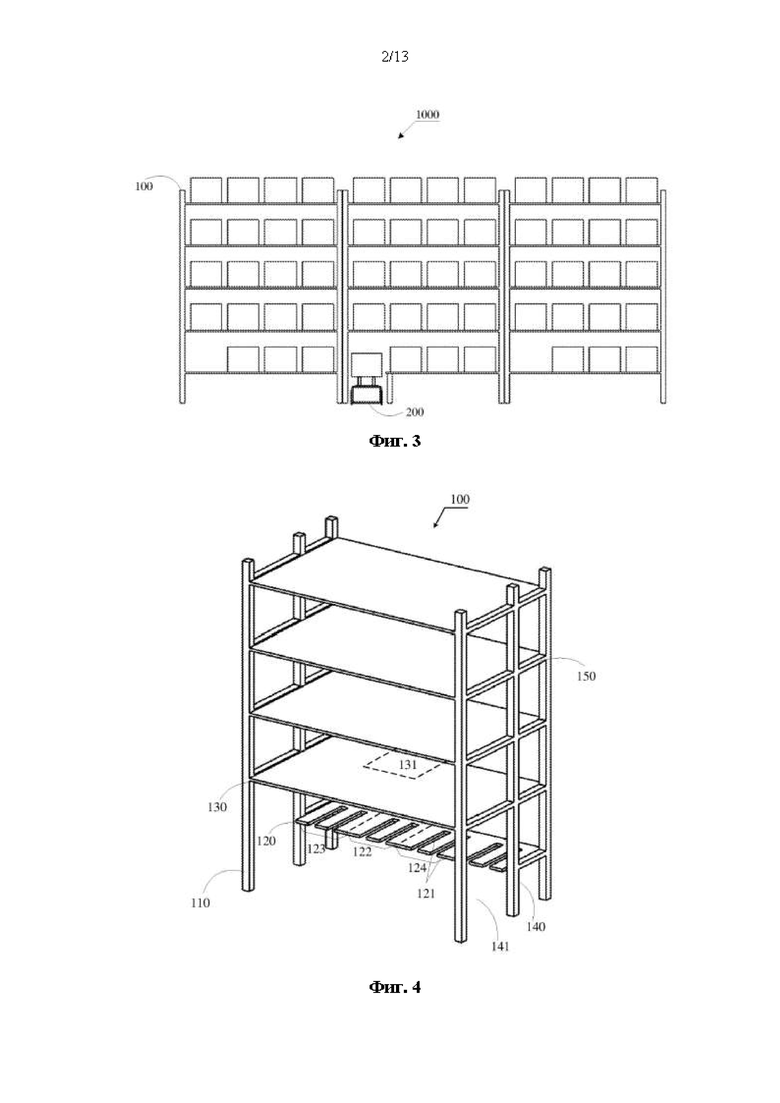
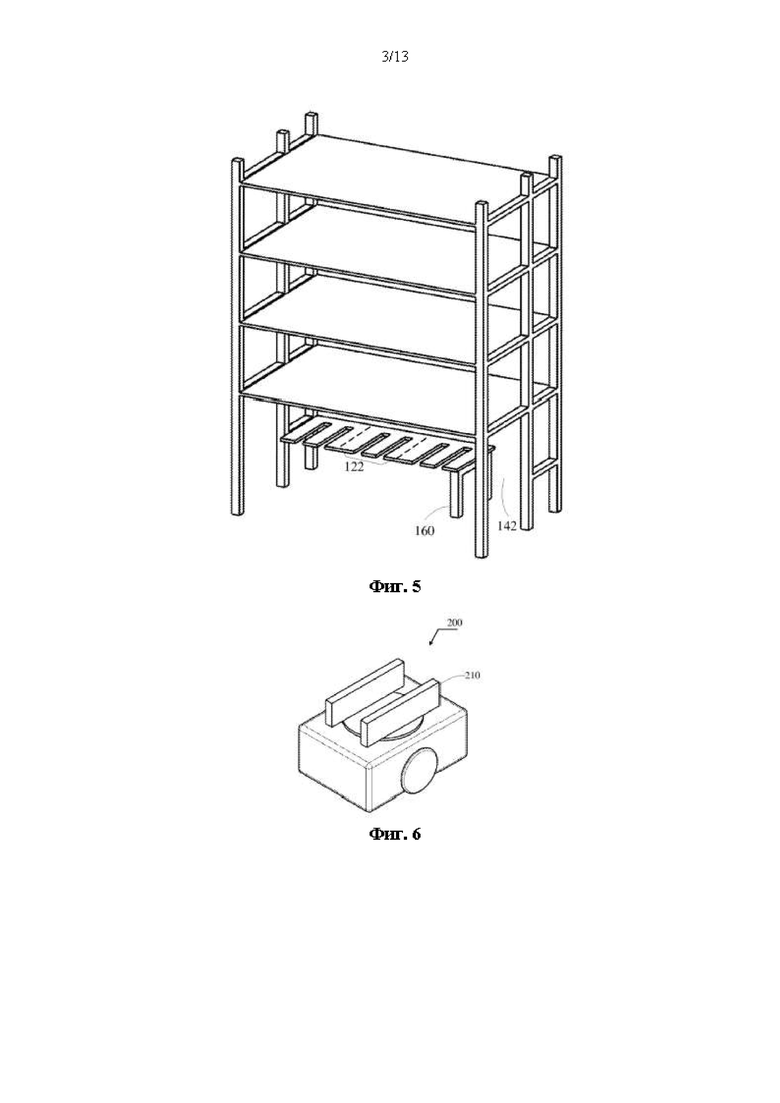
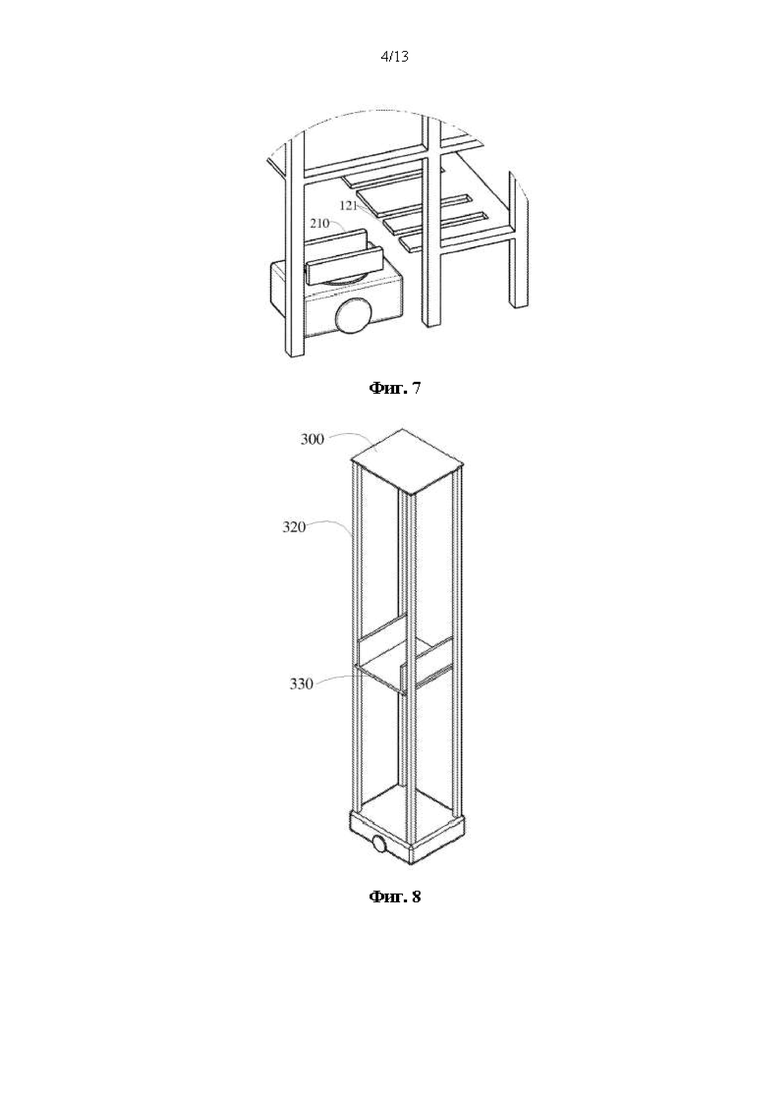

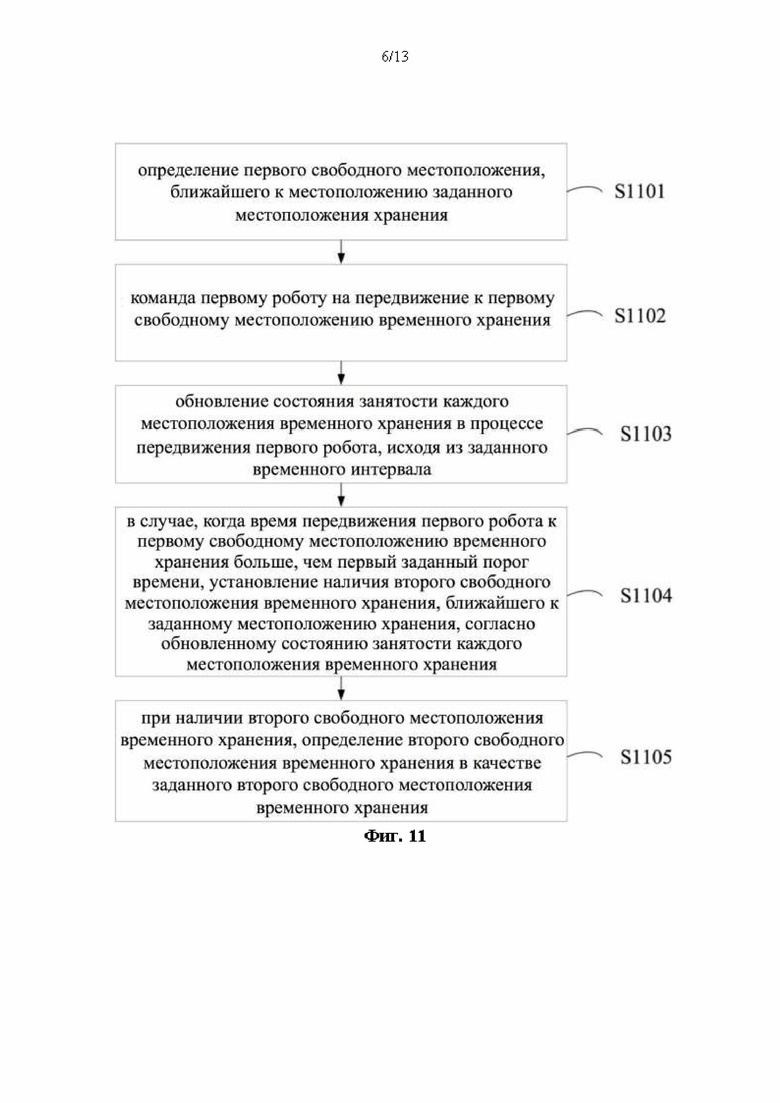
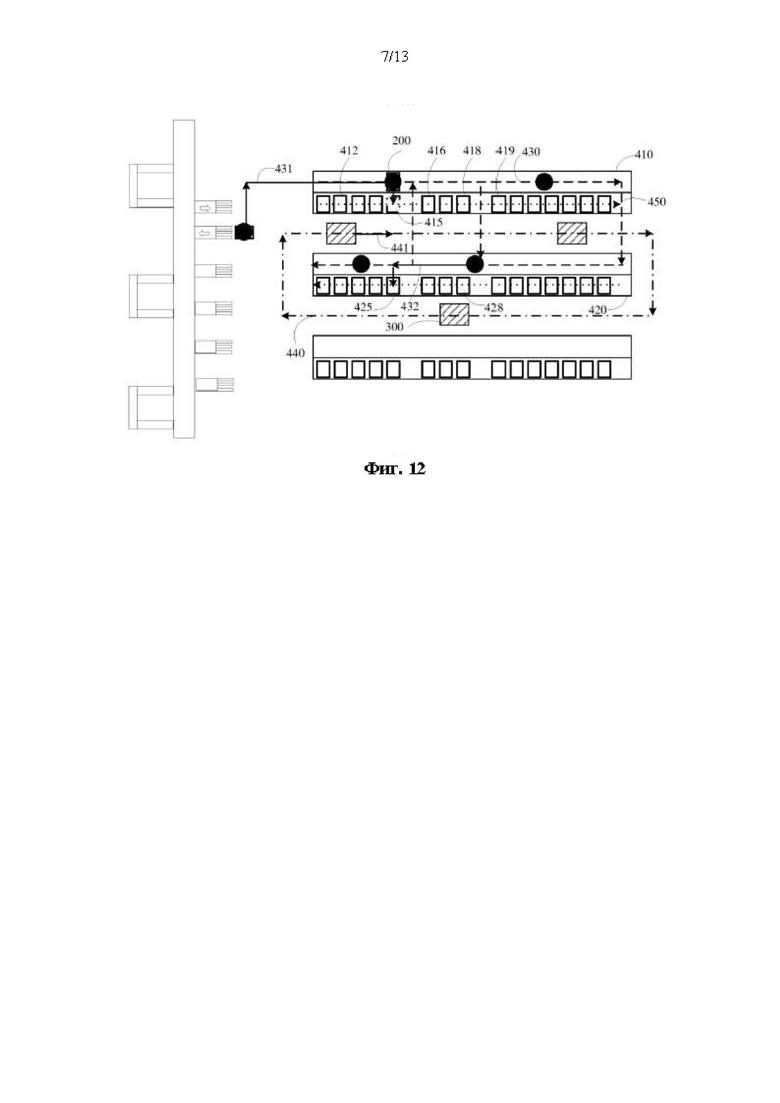
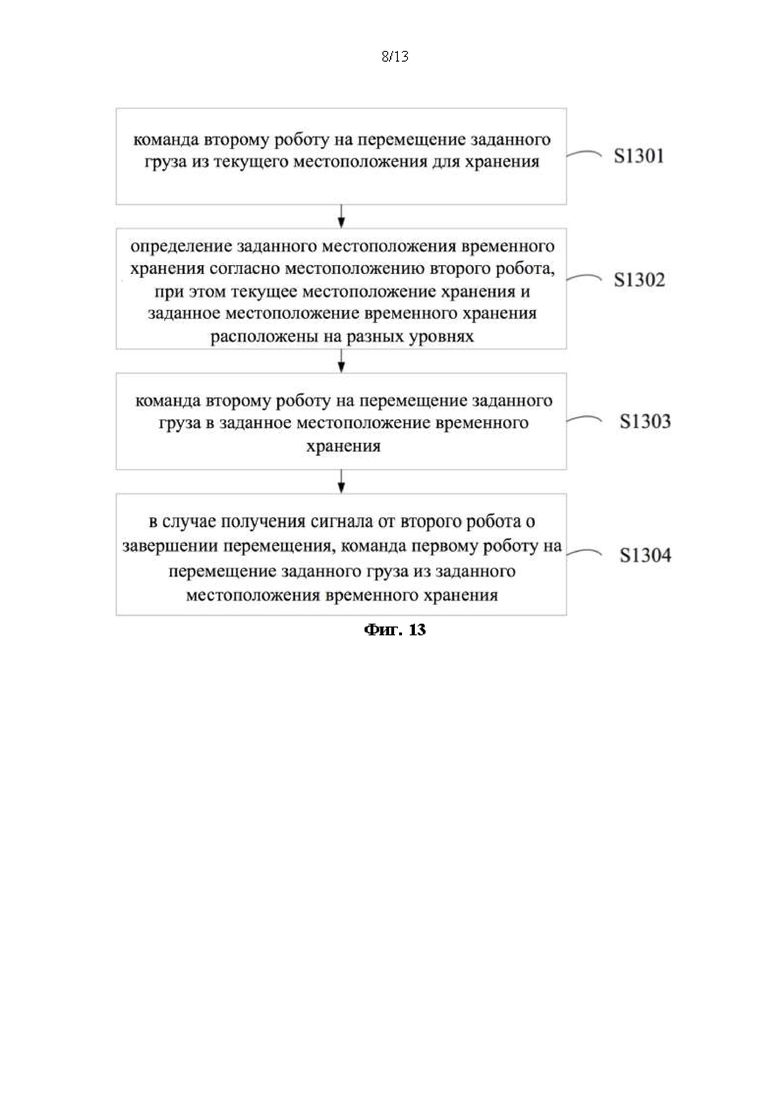
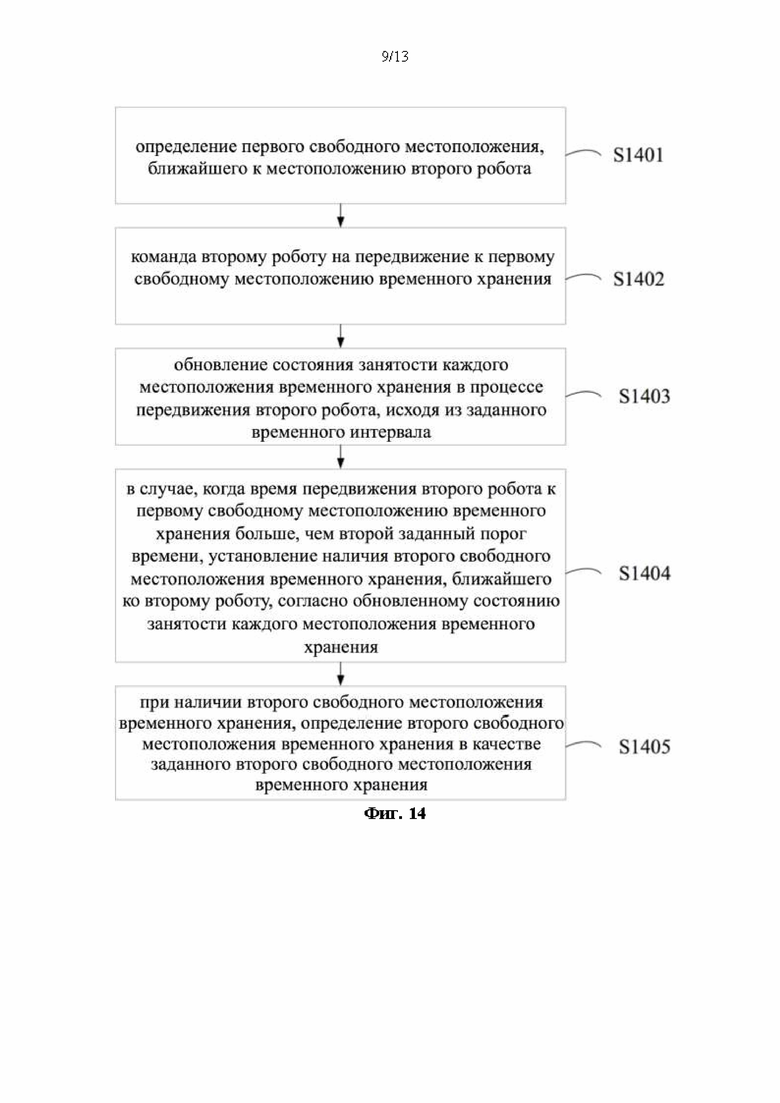

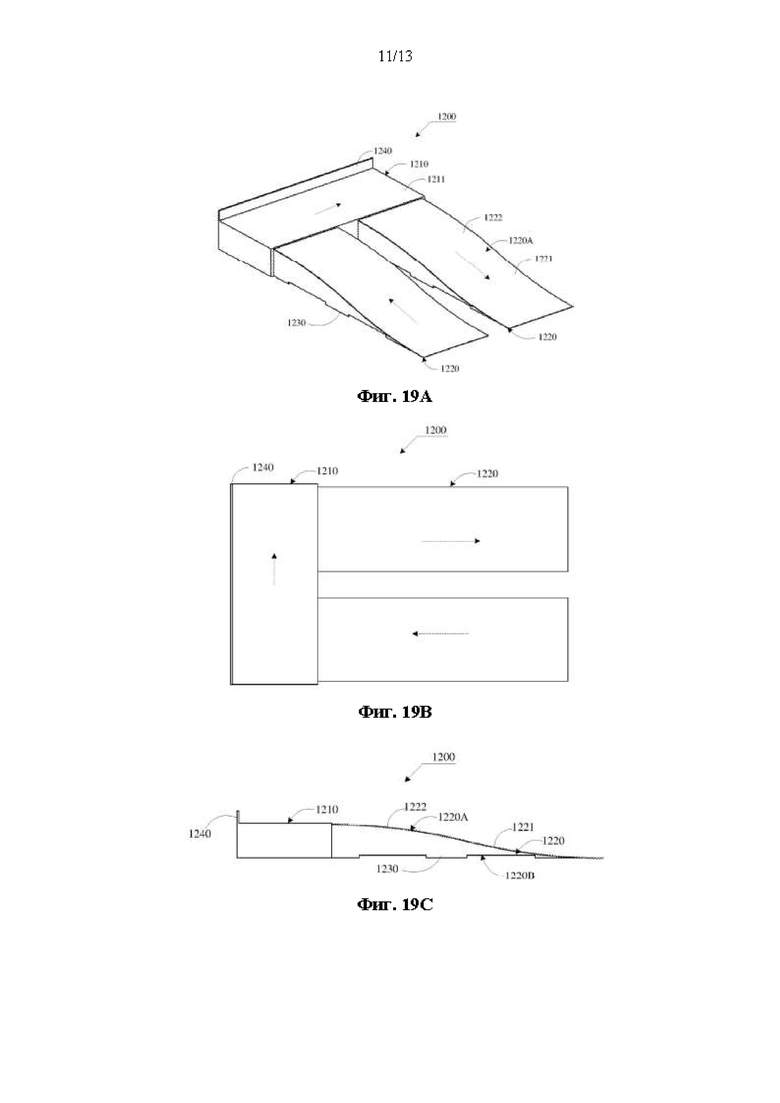
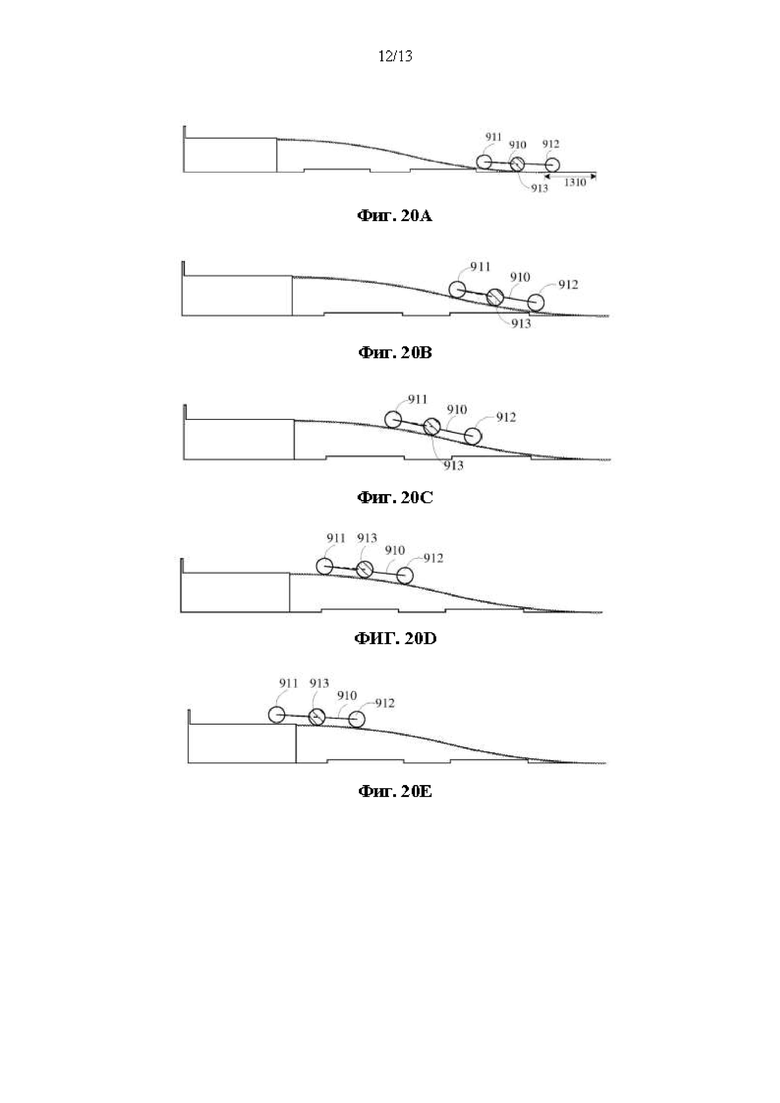
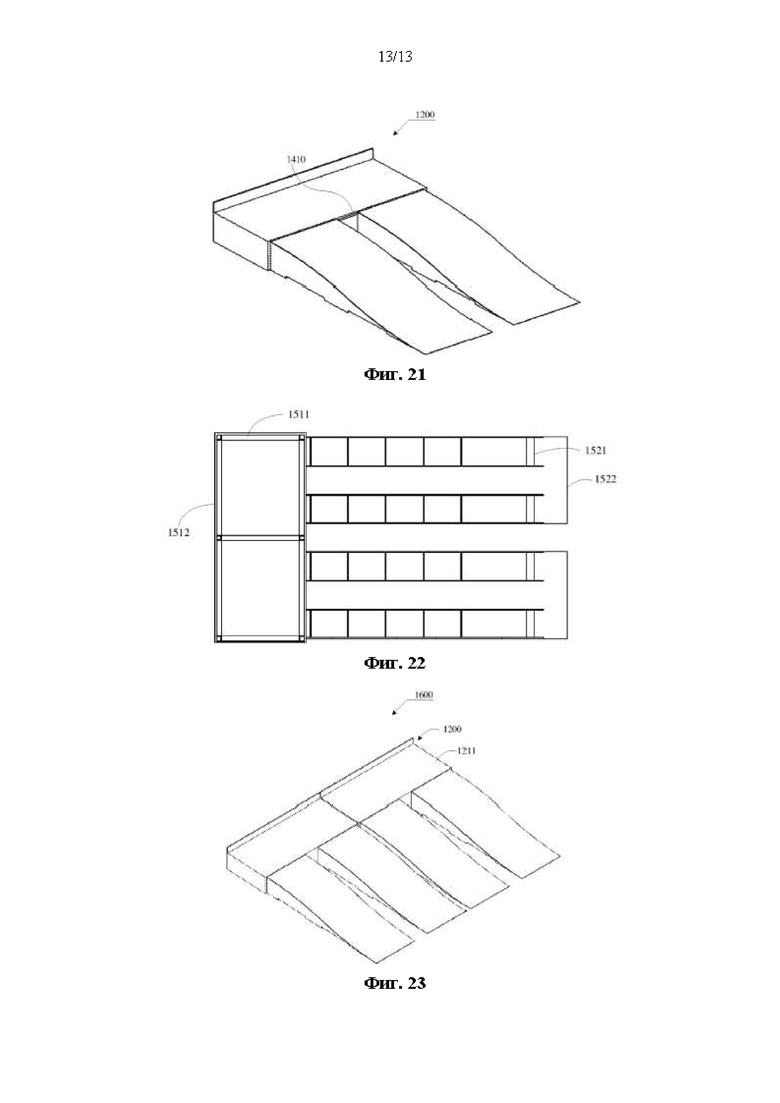
Изобретение относится к складскому устройству. Складское устройство содержит по меньшей мере одну полку временного хранения, стеллажи, проходы для роботов, роботов, погрузочно-разгрузочную площадку. Каждый из стеллажей содержит по меньшей мере одну полку хранилища и стойки, разнесенные друг от друга по горизонтали. По меньшей мере одну полку хранилища располагают между стойками по вертикали. Первого робота применяют в первом проходе для доступа к грузу на по меньшей мере одной полке временного хранения. Второго робота применяют во втором проходе для перемещения груза между по меньшей мере одной полкой временного хранения и по меньшей мере одной полкой хранилища. В проходе для первого робота предусматривают первый и второй проезды между по меньшей мере одной полкой временного хранения. В проходе для первого робота предусматривают пятый проезд между площадкой и стеллажами. Первый, второй и пятый проезды формируют контур из проездов для робота. Площадка содержит основную часть и наклонную площадку с вогнутой и выпуклой наклонной поверхностью. Верхний край вогнутой поверхности плавно соединяют с нижним краем выпуклой поверхности. Наклонная поверхность плавно переходит в верхнюю поверхность основной части. Достигается повышение эффективности поступления товаров на склад и отгрузки их со склада. 4 н. и 15 з.п. ф-лы, 23 ил.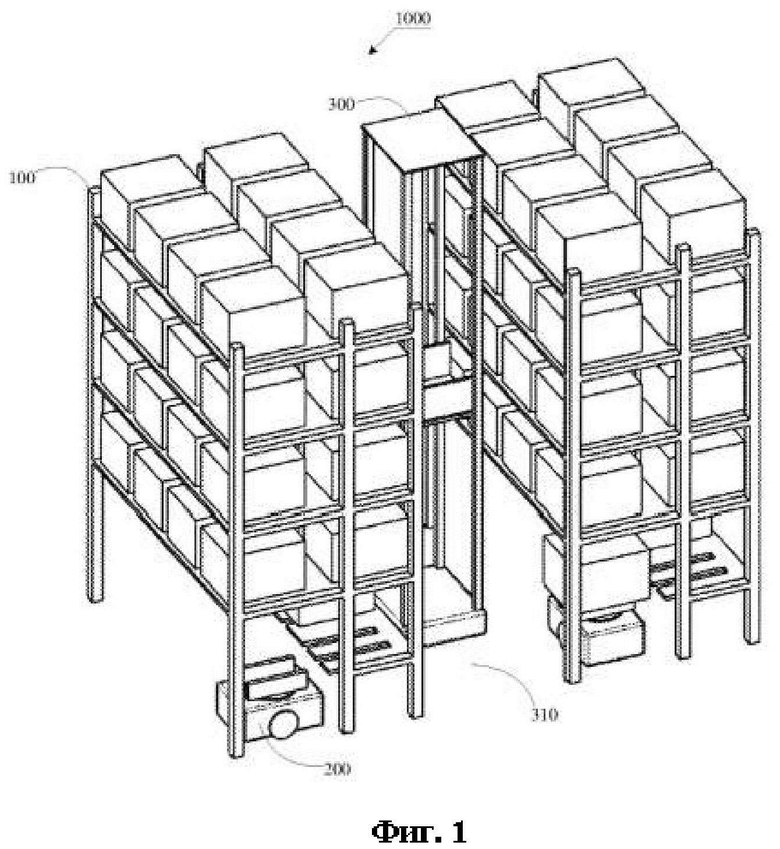
1. Складское устройство, предусматривающее:
по меньшей мере одну полку (120) временного хранения, при этом по меньшей мере одну полку (120) временного хранения применяют для обеспечения местоположения временного хранения;
некоторое количество стеллажей (100), при этом каждый из стеллажей (100) может предусматривать по меньшей мере одну полку (130) хранилища и некоторое количество стоек (110), разнесенных друг от друга по горизонтали, по меньшей мере одну полку (130) хранилища применяют для обеспечения местоположения хранения, и по меньшей мере одну полку (130) хранилища располагают между стойками (110) по вертикали выше или ниже по меньшей мере одной полки (120) временного хранения;
первый проход для роботов для передвижения первого робота (200), при этом первого робота (200) применяют для доступа к грузу на по меньшей мере одной полке (120) временного хранения; и
второй проход для роботов для передвижения второго робота (300), при этом второго робота (300) применяют для перемещения груза между по меньшей мере одной полкой (120) временного хранения и по меньшей мере одной полкой (130) хранилища,
отличающееся тем, что стойки (110) располагают на краю по меньшей мере одной полки (130) хранилища, в проходе для первого робота предусматривают первый проезд, и первый проезд располагают между по меньшей мере одной полкой (120) временного хранения и стойками (110);
причем в проходе для первого робота предусматривают второй проезд, и второй проезд располагают между по меньшей мере одной полкой (120) временного хранения и стойками (110), расположенными на одном конце по меньшей мере одной полки (120) временного хранения;
и которое дополнительно предусматривает погрузочно-разгрузочную площадку (400), причем в проходе для первого робота предусматривают пятый проезд, и пятый проезд располагают между погрузочно-разгрузочной площадкой (400) и стеллажами (100); и
причем первый проезд, второй проезд и пятый проезд формируют контур из проездов для передвижения первого робота (200).
2. Складское устройство по п. 1, в котором проход для первого робота предусматривает проход для доступа к грузам и проход для доступа к грузам расположен ниже по меньшей мере одной полки (120) временного хранения.
3. Складское устройство по п. 2, в котором проход для доступа к грузам дополнительно применяют для передвижения первого робота (200) в случае, если первый робот (200) не нагружен.
4. Складское устройство по п. 1, в котором по меньшей мере одна полка временного хранения (120) предусматривает некоторое количество полок временного хранения для предоставления местоположений временного хранения, первый проход для робота содержит третий проезд, причем третий проезд располагают по меньшей мере между двумя полками временного хранения.
5. Складское устройство по п. 4, в котором первый проход для роботов предусматривает четвертый проезд; при этом четвертый проезд располагают между двумя соседними стеллажами (100) и он соединяет третий проезд из двух соседних стеллажей и/или второй проезд из двух соседних стеллажей.
6. Складское устройство по любому из пп. 1-3, в котором второй проход для робота располагают на краю стеллажей (100) и он предусматривает проход между соседними стеллажами (100).
7. Складское устройство по любому из пп. 1-3, в котором по меньшей мере одну полку (120) временного хранения располагают на стеллажах (100).
8. Складское устройство по п. 1, в котором погрузочно-разгрузочная площадка (400) предусматривает:
основную часть (1210) площадки; и
наклонную площадку (1220), при этом наклонная поверхность (1220A) наклонной площадки (1220) площадки содержит вогнутую наклонную поверхность (1221) и выпуклую наклонную поверхность (1222), которые располагают в направлении от основания наклонной поверхности к верхней ее части, и верхний край вогнутой наклонной поверхности (1221) плавно соединяют с нижним краем выпуклой наклонной поверхности (1222);
где наклонную площадку (1220) располагают по одну сторону основной части (1210) площадки, так что наклонная поверхность (1220A) плавно переходит в верхнюю поверхность основной части (1210) площадки.
9. Складское устройство по п. 8, в котором проекция вогнутой наклонной поверхности (1221) на вертикальную плоскость представляет собой первую дугу и проекция выпуклой наклонной поверхности (1222) на вертикальную плоскость представляет собой вторую дугу, и радиус первой дуги больше или равен радиусу второй дуги.
10. Складское устройство по п. 8 или 9, в котором на боковой стенке основной части (1210) площадки напротив наклонной площадки (1220) площадки предусматривают зажимной паз, на боковой стенке наклонной площадки (1220) площадки напротив основной части (1210) площадки предусматривают зажимную планку, и зажимная планка защелкивается в зажимном пазу так, что наклонную площадку (1220) присоединяют к основной части (1210) площадки; зажимной паз располагают на длинной стороне основной части (1210) площадки, и зажимную планку располагают вдоль торца наклонной площадки (1220); предусматривают по меньшей мере две наклонные площадки (1220), и зажимные планки двух наклонных площадок (1220) подвижны в направлении вдоль зажимного паза с целью регулирования расстояния между ними.
11. Способ управления складскими операциями, предусматривающий:
определение (S1001) заданного местоположения для временного хранения согласно заданному местоположению для хранения заданного груза;
команду (S1002) первому роботу на перемещение заданного груза в заданное местоположение для временного хранения; и
в случае получения сигнала от первого робота о завершении перемещения, команду (S1003) второму роботу на перемещение заданного груза из заданного местоположения для временного хранения в заданное местоположение для хранения.
12. Способ по п. 11, в котором определение (S1001) заданного местоположения для временного хранения согласно заданному местоположению хранения предусматривает:
определение (S1101) первого свободного местоположения, ближайшего к местоположению заданного местоположения хранения;
команду (S1102) первому роботу на передвижение к первому свободному местоположению для временного хранения;
обновление состояния занятости каждого местоположения для временного хранения, исходя из заданного временного интервала, в процессе (S1103) передвижения первого робота;
в случае, когда время передвижения первого робота к первому свободному местоположению временного хранения больше, чем первый заданный порог времени, определение (S1104) второго свободного местоположения временного хранения, ближайшего к заданному местоположению хранения, согласно обновленному состоянию занятости каждого местоположения временного хранения; и
при наличии второго свободного местоположения временного хранения, определение (S1105) второго свободного местоположения временного хранения в качестве заданного второго свободного местоположения временного хранения.
13. Способ по п. 11 или 12, в котором команда (S1002) первому роботу на перемещение заданного груза в заданное местоположение временного хранения предусматривает:
определение первого маршрута перемещения по первому проходу для робота согласно информации о местоположении первого робота относительно заданного местоположения временного хранения; и
команду первому роботу на передвижение к нижней части заданного местоположения временного хранения вдоль первого маршрута перемещения.
14. Способ по п. 13, в котором проход для первого робота предусматривает проход для доступа к грузу, расположенный ниже полки временного хранения, и способ дополнительно предусматривает:
в случае, когда первый робот не нагружен, определение незанятого проезда по проходу для первого робота; и
команду первому роботу на передвижение вдоль незанятого проезда.
15. Способ по любому из пп. 11-14, в котором команда (S1003) второму роботу на перемещение заданного груза из заданного временного местоположения временного хранения в заданное местоположение хранения предусматривает:
определение второго маршрута перемещения по второму проходу для робота согласно информации о местоположении второго робота относительно заданного местоположения временного хранения; и
команду второму роботу на передвижение к боковой части заданного местоположения временного хранения по второму маршруту перемещения.
16. Способ управления отгрузкой со склада, предусматривающий:
команду (S1301) второму роботу на перемещение заданного груза из текущего местоположения хранения;
определение (S1302) заданного местоположения временного хранения согласно местоположению второго робота;
команду (S1303) второму роботу на перемещение заданного груза в заданное местоположение временного хранения; и
в случае получения сигнала от второго робота о завершении перемещения, команду (S1304) первому роботу на перемещение заданного груза из заданного местоположения временного хранения.
17. Способ по п. 16, в котором определение (S1302) заданного местоположения временного хранения согласно местоположению второго робота предусматривает:
определение (S1401) первого свободного местоположения, ближайшего к местоположению второго робота;
команду (S1402) второму роботу на передвижение к первому свободному местоположению временного хранения;
обновление (S1403) состояния занятости каждого местоположения временного хранения в процессе передвижения второго робота, исходя из заданного временного интервала;
в случае, когда время передвижения второго робота к первому свободному местоположению временного хранения больше, чем второй заданный порог времени, определение (S1404) второго свободного местоположения временного хранения, ближайшего ко второму роботу, согласно обновленному состоянию занятости каждого местоположения временного хранения; и
при наличии второго свободного местоположения временного хранения, определение (S1405) второго свободного местоположения временного хранения в качестве заданного второго свободного местоположения временного хранения.
18. Способ по п. 16 или 17, в котором команда (S1304) первому роботу на перемещение заданного груза из заданного местоположения временного хранения предусматривает:
определение первого маршрута перемещения по первому проходу для робота согласно информации о местоположении первого робота относительно заданного местоположения временного хранения; и
команду первому роботу на передвижение к нижней части заданного местоположения временного хранения вдоль первого маршрута перемещения.
19. Складская система, которая предусматривает:
складское устройство (1000) согласно любому из пп. 1-10;
устройство управления (1510), предусматривающее процессор (1512) и
запоминающее устройство (1511), при этом на запоминающем устройстве хранят команды, и при загрузке и исполнении команды процессором (1512) это устройство осуществляет способ согласно любому из пп. 11-18;
первого робота (200), который передвигается по первому проходу для роботов; и
второго робота (300), который передвигается по второму проходу для роботов.
| CN 109987366 A, 09.07.2019 | |||
| CN 110654760 A, 07.01.2020 | |||
| CN 210162597 U, 20.03.2020 | |||
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ НА СКЛАДЕ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2017 |
|
RU2688914C2 |
