Область техники, к которой относится изобретение
[001] Настоящая технология в целом относится к транспортным платформам для складских роботизированных систем и к способам управления ими.
Уровень техники
[002] Роботизированные транспортные средства широко используются в целом ряде отраслей для различных целей, в частности, для визуального осмотра и транспортировки различных предметов. Например, в некоторых случаях роботизированные транспортные средства используются для перемещения предметов, хранящихся на складе.
[003] Одни роботизированные транспортные средства программируются для движения по заданным маршрутам или ориентируются на использование указателей при навигации в складском пространстве. Другие роботизированные транспортные средства оснащаются дополнительными системами для «автономной» адаптации к изменениям планировки складского пространства или к возникающим в реальном времени препятствиям, что повышает их общую эффективность и безопасность при организации складской логистики.
[004] В некоторых случаях такие роботизированные транспортные средства содержат нижнюю часть, оснащенную колесами для перемещения роботизированного транспортного средства по полу склада, и съемную верхнюю часть, способную перемещаться в вертикальном направлении, например, за счет соединения с направляющими складских стеллажей. Таким образом, верхняя часть может забирать товары, размещенные на складских стеллажах.
[005] При этом, поскольку складские стеллажи могут быть наклонены или перекошены (из-за неточной установки, перегрузки и т.д.), роботизированные транспортные средства и, в частности, их верхние части могут быть неспособными правильно прикрепляться к складским стеллажам и не в состоянии должным образом перемещаться в вертикальном направлении даже в случае прикрепления к ним.
Раскрытие изобретения
[006] Целью настоящей технологии является устранение по меньшей мере части указанных выше недостатков.
[007] В соответствии с одним широким аспектом настоящей технологии реализовано платформенное транспортное средство для складской роботизированной системы, способная перемещаться по складским стеллажам в вертикальном направлении и содержащая платформу, имеющую продольное и поперечное направления и способную вертикально перемещаться вверх и вниз по двум складским стеллажам, расположенным с противоположных сторон платформы и разнесенным в продольном направлении, и систему сцепления, способную взаимодействовать с двумя складскими стеллажами и содержащую первый узел сцепления, способный выборочно взаимодействовать с первым стеллажным элементом сцепления первого стеллажа из двух стеллажей, второй узел сцепления, способный выборочно взаимодействовать со вторым стеллажным элементом сцепления второго стеллажа из двух стеллажей, при этом первый и второй узлы сцепления расположены с противоположных сторон платформы и разнесены в продольном направлении, продольную направляющую, способную направлять первый и второй узлы сцепления в продольном направлении платформы, узел привода продольного разнесения, способный выборочно перемещать первый и второй узлы сцепления вдоль продольной направляющей, в результате чего первый и второй узлы сцепления имеют возможность перемещаться между первым положением разнесения и вторым положением разнесения, в котором продольное расстояние между первым и вторым узлами сцепления больше, чем в первом положении разнесения, первый узел сцепления способен взаимодействовать с первым стеллажным элементом сцепления, а второй узел сцепления - со вторым стеллажным элементом сцепления, и систему поперечных направляющих, способную направлять первый и второй узлы сцепления в поперечном направлении платформы и выполненную таким образом, что (1) когда первый узел сцепления и первый стеллажный элемент сцепления находятся во взаимодействии и платформенное транспортное средство движется по вертикали, первый узел сцепления способен перемещаться вдоль системы поперечных направляющих при поперечном смещении первого стеллажного элемента сцепления, и (2) когда второй узел сцепления и второй стеллажный элемент сцепления находятся во взаимодействии и платформенное транспортное средство движется по вертикали, второй узел сцепления способен перемещаться вдоль системы поперечных направляющих при поперечном смещении второго стеллажного элемента сцепления.
[008] В некоторых вариантах осуществления система поперечных направляющих способна направлять первый и второй узлы сцепления в поперечном направлении платформы по первой и второй прямолинейным траекториям, соответственно, при этом первая и вторая прямолинейные траектории разнесены в продольном направлении.
[009] В некоторых вариантах осуществления первый и/или второй узел сцепления содержит по меньшей мере одно углубление для направляющей, предназначенное для размещения соответствующей направляющей системы поперечных направляющих.
[010] В некоторых вариантах осуществления первый и/или второй узел сцепления содержит по меньшей мере одну направляющую, размещаемую в соответствующем углублении для направляющей системы поперечных направляющих.
[011] В некоторых вариантах осуществления система поперечных направляющих содержит узел первой поперечной направляющей, способный направлять первый узел сцепления в поперечном направлении платформы и выполненный таким образом, что когда первый узел сцепления и первый стеллажный элемент сцепления находятся во взаимодействии и платформенное транспортное средство движется по вертикали, первый узел сцепления способен перемещаться вдоль узла первой поперечной направляющей при поперечном смещении первого стеллажного элемента сцепления, и узел второй поперечной направляющей, способный направлять второй узел сцепления в поперечном направлении платформы и выполненный таким образом, что, когда второй узел сцепления и второй стеллажный элемент сцепления находятся во взаимодействии и платформенное транспортное средство движется по вертикали, второй узел сцепления способен перемещаться вдоль узла второй поперечной направляющей при поперечном смещении второго стеллажного элемента сцепления.
[012] В некоторых вариантах осуществления узел привода продольного разнесения способен выборочно перемещать первый и второй узлы сцепления из первого положения разнесения во второе положение разнесения, обнаруживать взаимодействие первого узла сцепления с первым стеллажным элементом сцепления и второго узла сцепления со вторым стеллажным элементом сцепления, а также прекращать перемещение первого и второго узлов сцепления между первым и вторым положениями разнесения в случае обнаружения взаимодействия обоих узлов сцепления.
[013] В некоторых вариантах осуществления узел привода продольного разнесения выполнен таким образом, что когда первый и второй узлы сцепления не перемещаются между первым и вторым положениями разнесения под действием узла привода продольного размещения, эти узлы могут свободно перемещаться между первым и вторым положениями разнесения при продольном смещении первого стеллажного элемента сцепления и/или второго стеллажного элемента сцепления во время вертикального движения платформенного транспортного средства по двум стеллажам.
[014] В некоторых вариантах осуществления узел привода продольного разнесения способен обнаруживать взаимодействие первого узла сцепления с первым стеллажным элементом сцепления и/или второго узла сцепления со вторым стеллажным элементом сцепления с использованием по меньшей мере одного индукционного детектора, способного фиксировать взаимодействие со стеллажом.
[015] В некоторых вариантах осуществления узел привода продольного разнесения содержит шарико-винтовую передачу, способную выборочно перемещать первый и второй узлы сцепления между первым и вторым положениями разнесения.
[016] В некоторых вариантах осуществления шарико-винтовая передача содержит стержень с двумя противоположными винтовыми резьбами, при этом одна из противоположных винтовых резьб приводит в движение первый узел сцепления, а другая приводит в движение второй узел сцепления в противоположном направлении.
[017] В некоторых вариантах осуществления первый стеллажный элемент сцепления и/или второй стеллажный элемент сцепления представляет собой зубчатую рейку, а первый узел сцепления и/или второй узел сцепления содержит по меньшей мере одно зубчатое колесо, способное взаимодействовать с соответствующей зубчатой рейкой.
[018] В некоторых вариантах осуществления продольная направляющая и система поперечных направляющих функционируют независимо друг от друга.
[019] В соответствии с другим широким аспектом настоящей технологии реализован способ перемещения в вертикальном направлении платформенного транспортного средства роботизированной системы, содержащей платформу, имеющую продольное и поперечное направления, по складским стеллажам, который предусматривает установку платформы между двумя складскими стеллажами таким образом, чтобы два стеллажа располагались с противоположных сторон платформы и были разнесены в продольном направлении, выдвижение первого и второго узлов сцепления платформенного транспортного средства в продольном направлении вдоль продольной направляющей платформенного транспортного средства из первого положения разнесения во второе положение разнесения, введение во взаимодействие первого узла сцепления с первым стеллажным элементом сцепления первого стеллажа из двух стеллажей во втором положении разнесения и второго узла сцепления со вторым стеллажным элементом сцепления второго стеллажа из двух стеллажей во втором положении разнесения, и перемещение платформенного транспортного средства в вертикальном направлении относительно двух стеллажей таким образом, чтобы при поперечном смещении первого стеллажного элемента сцепления и/или второго стеллажного элемента сцепления первый узел сцепления и/или второй узел сцепления перемещался в поперечном направлении вдоль системы поперечных направляющих платформенного транспортного средства.
[020] В некоторых вариантах осуществления система поперечных направляющих способна направлять первый и второй узлы сцепления в поперечном направлении платформы по первой и второй прямолинейным траекториям, соответственно, при этом первая и вторая прямолинейные траектории разнесены в продольном направлении.
[021] В некоторых вариантах осуществления первый и/или второй узел сцепления содержит по меньшей мере одно углубление для направляющей, предназначенное для размещения соответствующей направляющей системы поперечных направляющих.
[022] В некоторых вариантах осуществления первый и/или второй узел сцепления содержит по меньшей мере одну направляющую, размещаемую в соответствующем углублении для направляющей системы поперечных направляющих.
[023] В некоторых вариантах осуществления, продольное и поперечное положения первого и второго узлов сцепления могут свободно изменяться в зависимости от продольного и поперечного положений первого и второго стеллажных элементов сцепления, когда первый узел сцепления взаимодействует с первым стеллажным элементом сцепления, а второй узел сцепления - со вторым стеллажным элементом сцепления.
[024] В некоторых вариантах осуществления продольное и поперечное положения первого и второго узлов сцепления определяются исключительно продольным и поперечным положениями первого и второго стеллажных элементов сцепления, когда первый узел сцепления взаимодействует с первым стеллажным элементом сцепления, а второй узел сцепления - со вторым стеллажным элементом сцепления.
[025] В некоторых вариантах осуществления первый стеллажный элемент сцепления и/или второй стеллажный элемент сцепления представляет собой зубчатую рейку, а первый узел сцепления и/или второй узел сцепления содержит по меньшей мере одно зубчатое колесо, способное взаимодействовать с соответствующей зубчатой рейкой.
[026] В некоторых вариантах осуществления продольная направляющая и система поперечных направляющих функционируют независимо друг от друга.
[027] В соответствии с еще одним широким аспектом настоящей технологии реализовано платформенное транспортное средство для складской роботизированной системы, способная перемещаться по складским стеллажам в вертикальном направлении и содержащая платформу, имеющую центр, продольное и поперечное направления и способную вертикально перемещаться вверх и вниз по двум складским стеллажам, расположенным с противоположных сторон платформы и разнесенным в продольном направлении, и систему сцепления, способную взаимодействовать с двумя складскими стеллажами, которая включает в себя первый узел сцепления, способный выборочно взаимодействовать с первым стеллажным элементом сцепления первого стеллажа из двух стеллажей и способный перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением первого узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении, второй узел сцепления, способный выборочно взаимодействовать со вторым стеллажным элементом сцепления второго стеллажа из двух стеллажей и способный перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением второго узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении, первый направляющий паз, способный ограничивать перемещение первого узла сцепления так, чтобы первый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся первым направляющим пазом в свое нейтральное положение в поперечном направлении, и второй направляющий паз, способный ограничивать перемещение второго узла сцепления так, чтобы второй узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся вторым направляющим пазом в свое нейтральное положение в поперечном направлении.
[028] В некоторых вариантах осуществления нейтральное положение первого узла сцепления и нейтральное положение второго узла сцепления выровнены в поперечном направлении.
[029] В некоторых вариантах осуществления нейтральное положение первого узла сцепления и нейтральное положение второго узла сцепления смещены в продольном направлении в противоположные стороны относительно центра платформы на одинаковое расстояние.
[030] В некоторых вариантах осуществления первый направляющий паз и/или второй направляющий паз вблизи центра платформы сужены в поперечном направлении.
[031] В некоторых вариантах осуществления первый направляющий паз и/или второй направляющий паз имеет наибольшую поперечную ширину в продольном положении, наиболее удаленном от центра платформы.
[032] В некоторых вариантах осуществления первый направляющий паз и второй направляющий паз симметричны относительно оси симметрии, параллельной поперечному направлению и проходящей через центр платформы.
[033] В некоторых вариантах осуществления первый направляющий паз  второго направляющего паза в поперечном направлении, когда оба направляющих паза находятся в крайнем продольном положении.
второго направляющего паза в поперечном направлении, когда оба направляющих паза находятся в крайнем продольном положении.
[034] В некоторых вариантах осуществления первый направляющий паз выполнен таким образом, что первый узел сцепления в любом своем продольном положении может занимать единственное поперечное положение.
[035] В некоторых вариантах осуществления система сцепления содержит продольную направляющую, способную направлять первый и второй узлы сцепления в продольном направлении платформы между нейтральным положением и максимально выдвинутым продольным положением, а первый направляющий паз и второй направляющий паз имеют наибольшую ширину в максимально выдвинутом продольном положении.
[036] В некоторых вариантах осуществления, в которых система сцепления содержит систему поперечных направляющих, способную направлять первый и второй узлы сцепления в поперечном направлении платформы между нейтральным положением и максимально выдвинутым поперечным положением, первый направляющий паз и/или второй направляющий паз в продольном положении, наиболее удаленном от центра платформы, имеет такую поперечную ширину, чтобы первый направляющий паз и/или второй направляющий паз обеспечивал все возможные поперечные положения соответствующего узла сцепления.
[037] В некоторых вариантах осуществления система сцепления содержит третий узел сцепления, способный выборочно взаимодействовать с третьим стеллажным элементом сцепления первого стеллажа и способный перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением третьего узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении, четвертый узел сцепления, способный выборочно взаимодействовать с четвертым стеллажным элементом сцепления второго стеллажа и способный перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением четвертого узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении, а также третий направляющий паз, способный ограничивать перемещение третьего узла сцепления так, чтобы третий узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся третьим направляющим пазом в свое нейтральное положение в поперечном направлении, и четвертый направляющий паз, способный ограничивать перемещение четвертого узла сцепления так, чтобы четвертый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся четвертым направляющим пазом в свое нейтральное положение в поперечном направлении.
[038] В некоторых вариантах осуществления первый направляющий паз и/или второй направляющий паз представляет собой канавку или щель, а первый узел сцепления и/или второй узел сцепления содержит выступ или ролик для взаимодействия с соответствующим направляющим пазом.
[039] В некоторых вариантах осуществления первый направляющий паз в поперечном направлении, чем второй направляющий паз, в крайнем продольном положении направляющих пазов, третий направляющий паз и четвертый направляющий паз симметричны относительно оси симметрии, параллельной поперечному направлению и проходящей через центр платформы, а второй направляющий паз и четвертый направляющий паз симметричны относительно оси симметрии, параллельной продольному направлению и проходящей через центр платформы.
[040] В соответствии с еще одним широким аспектом настоящей технологии реализован способ управления платформенным транспортным средством для складской роботизированной системы, способной перемещаться по складским стеллажам в вертикальном направлении и содержащей платформу, имеющую продольное и поперечное направления. Способ предусматривает отведение в продольном направлении первого узла сцепления из выдвинутого положения в нейтральное положение с ограничением движения первого узла сцепления первым направляющим пазом таким образом, чтобы первый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся первым направляющим пазом в свое нейтральное положение в поперечном направлении, и отведение в продольном направлении второго узла сцепления из выдвинутого положения в нейтральное положение с ограничением движения второго узла сцепления вторым направляющим пазом таким образом, чтобы второй узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся вторым направляющим пазом в свое нейтральное положение в поперечном направлении.
[041] В некоторых вариантах осуществления способ предусматривает выдвижение первого узла сцепления, после его отведения, из нейтрального положения во второе выдвинутое положение, отведение в продольном направлении первого узла сцепления, после его выдвижения, из второго выдвинутого положения в нейтральное положение с ограничением движения первого узла сцепления первым направляющим пазом таким образом, чтобы первый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся первым направляющим пазом в свое нейтральное положение в поперечном направлении, выдвижение второго узла сцепления, после его отведения, из нейтрального положения в третье выдвинутое положение и отведение в продольном направлении второго узла сцепления, после его выдвижения, из третьего выдвинутого положения в нейтральное положение с ограничением движения второго узла сцепления вторым направляющим пазом таким образом, чтобы второй узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся вторым направляющим пазом в свое нейтральное положение в поперечном направлении.
[042] В некоторых вариантах осуществления выдвинутое положение первого узла сцепления отличается от второго выдвинутого положения первого узла сцепления и/или выдвинутое положение второго узла сцепления отличается от третьего выдвинутого положения второго узла сцепления.
[043] Признаки любого раскрытого здесь аспекта и примеры его осуществления могут свободно сочетаться с любыми другими аспектами и примерами их осуществления. Например, любые признаки направляющих (и связанные с ними признаки) могут свободно сочетаться с любыми признаками направляющих пазов (и связанными с ними признаками).
[044] В настоящем описании термины, относящиеся к пространственной ориентации, такие как вперед, назад, вверх, вниз, влево и вправо, соответствуют их общепринятому пониманию пользователем или оператором роботизированного транспортного средства. При описании или указании элементов или подсистем устройства отдельно от устройства термины, относящиеся к пространственной ориентации, следует понимать так, как если бы эти элементы или подсистемы были установлены на устройстве.
[045] Каждый вариант осуществления настоящей технологии относится по меньшей мере к одному из вышеупомянутых аспектов, но не обязательно ко всем ним. Следует понимать, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, не упомянутым здесь явным образом.
[046] Вышеупомянутые аспекты и варианты осуществления могут свободно сочетаться друг с другом.
[047] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, на приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[048] Для более полного понимания настоящей технологии, ее аспектов и дополнительных признаков следует обратиться к следующему описанию, которое должно использоваться в сочетании с сопроводительными чертежами.
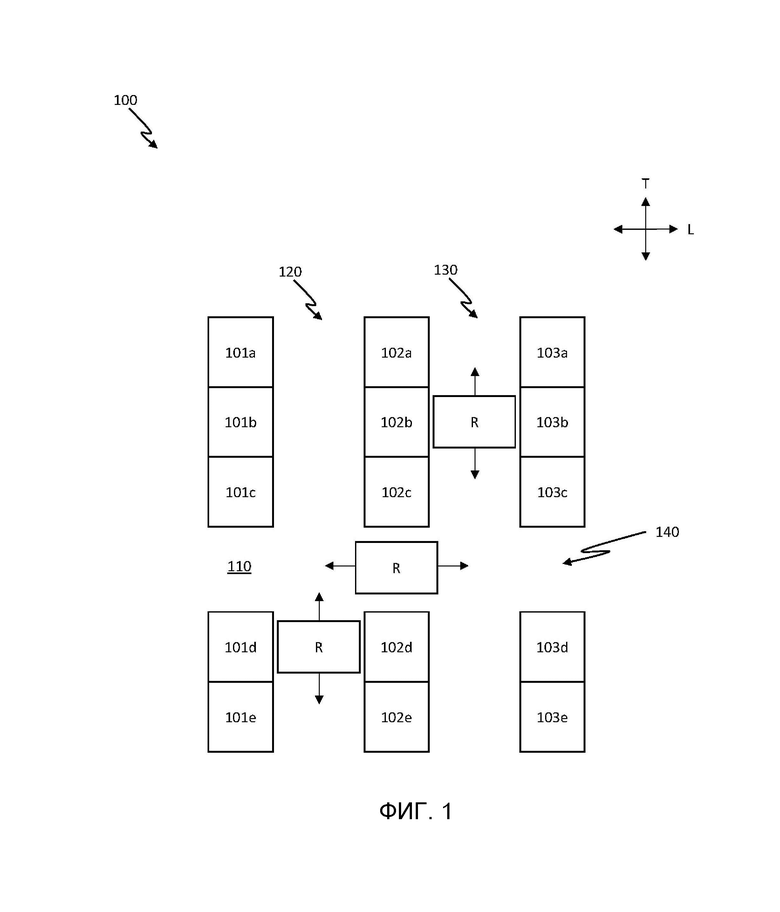
[049] На фиг. 1 схематически представлен вид сверху склада со стеллажами и роботизированными транспортными средствами.
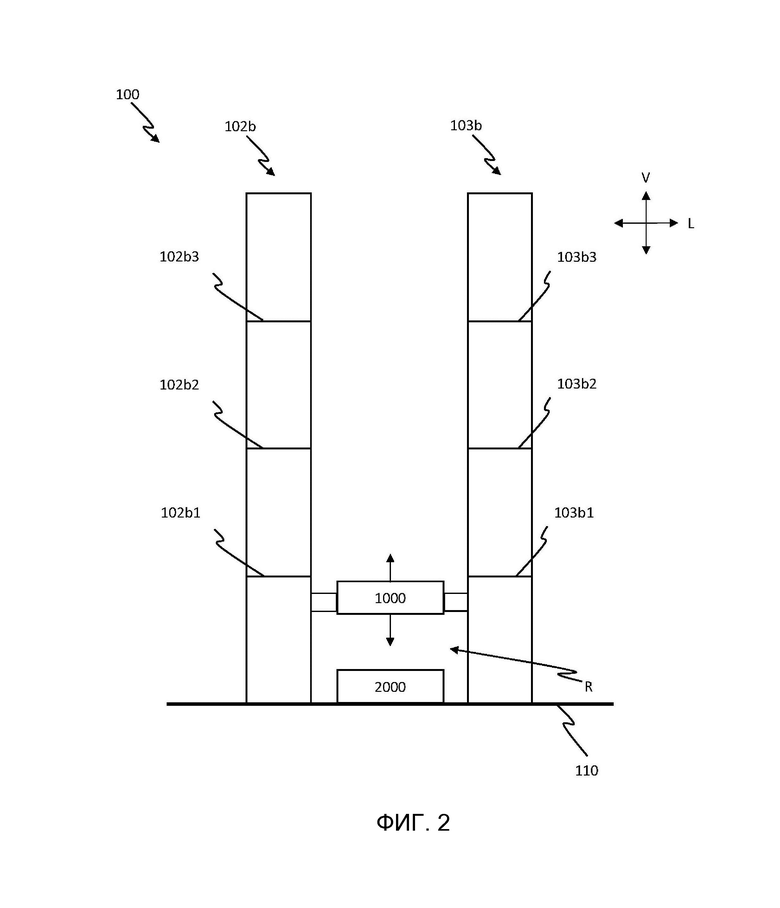
[050] На фиг. 2 схематически представлен вид сбоку роботизированного транспортного средства между двумя стеллажами на складе, показанном на фиг. 1.
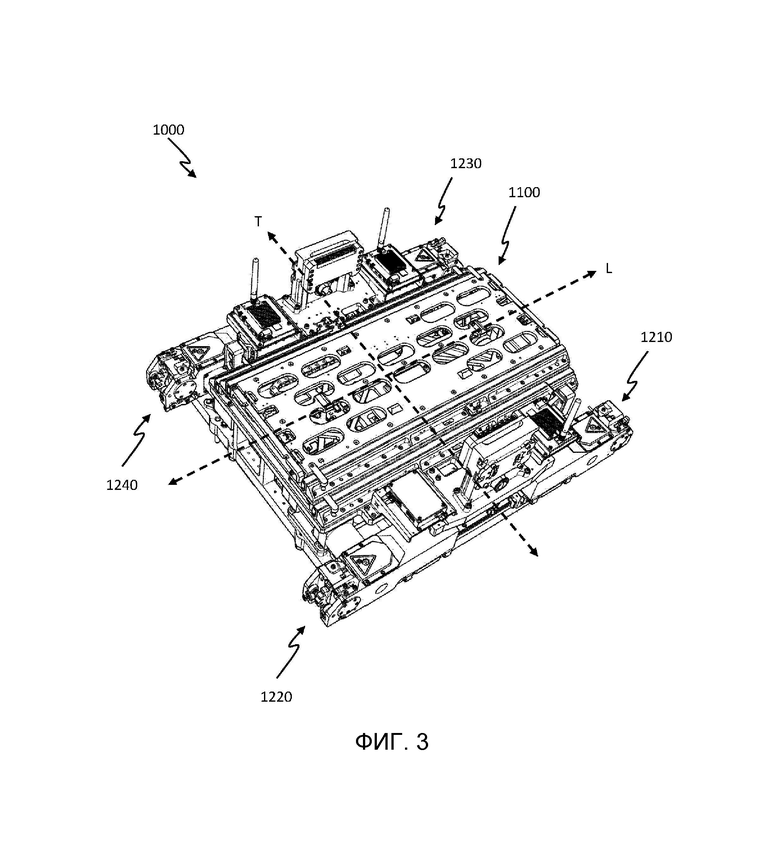
[051] На фиг. 3 представлен аксонометрический вид платформенного транспортного средства роботизированного транспортного средства в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
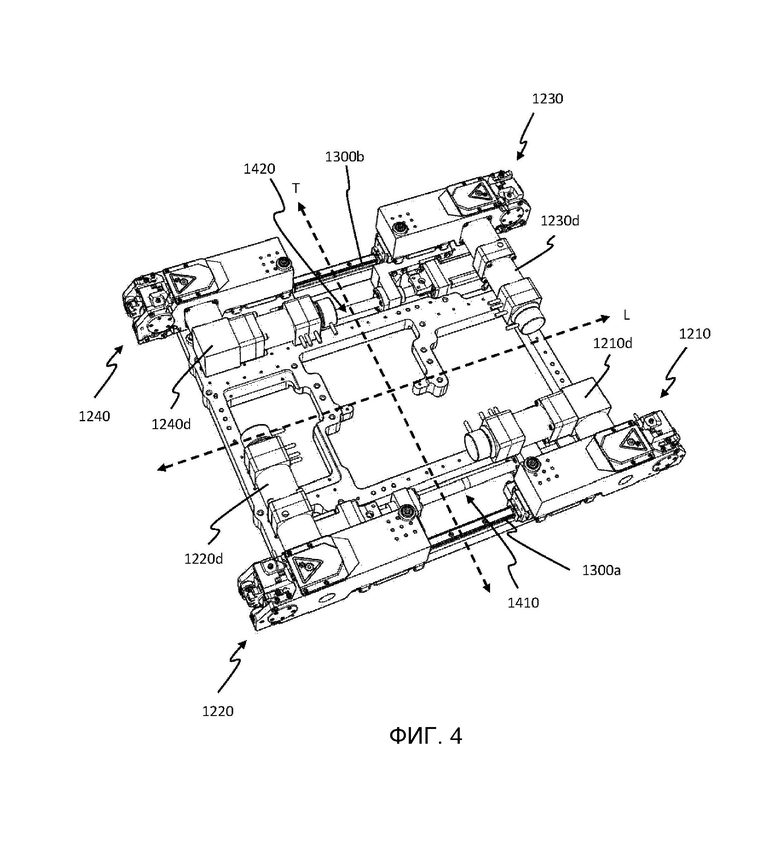
[052] На фиг. 4 представлен аксонометрический вид платформенного транспортного средства, показанной на фиг. 3, на котором скрыты несколько элементов, чтобы показать четыре узла сцепления, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
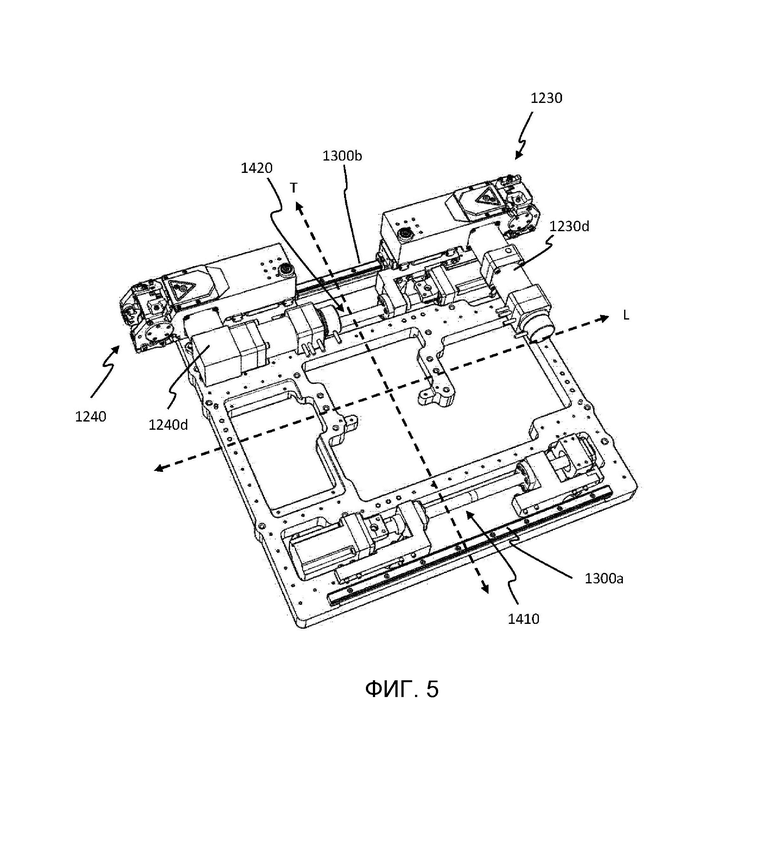
[053] На фиг. 5 представлен аксонометрический вид платформенного транспортного средства, показанной на фиг. 3, на котором скрыто еще несколько элементов, чтобы показать узел привода продольного разнесения транспортного средства, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[054] На фиг. 6 представлен местный аксонометрический вид двух узлов сцепления платформенного транспортного средства, показанной на фиг. 3, вместе с продольной направляющей и узлом привода продольного разнесения, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
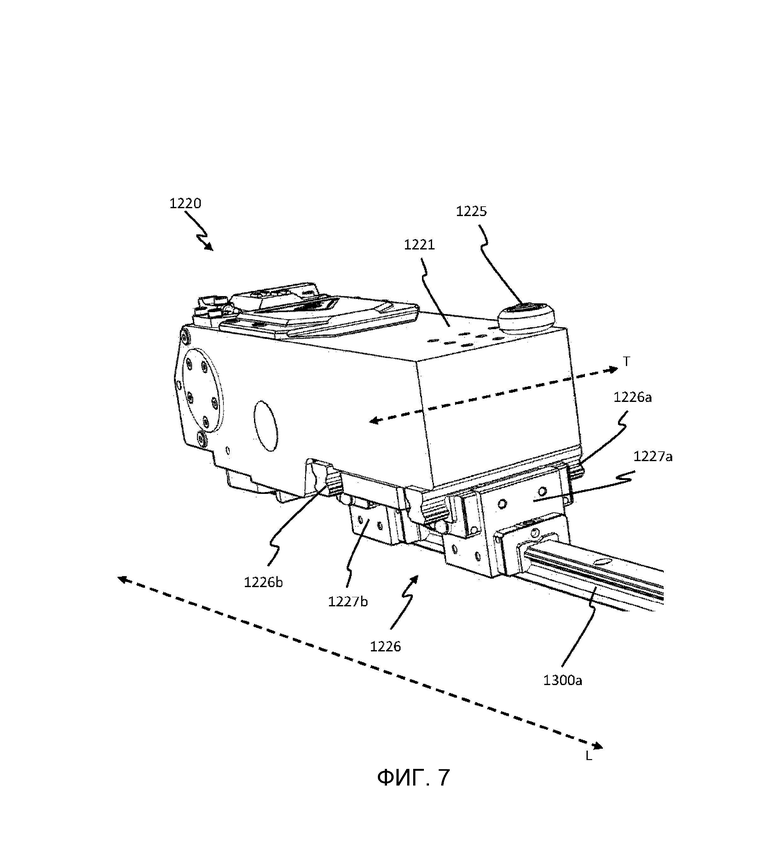
[055] На фиг. 7 представлен местный аксонометрический вид узла сцепления, показанного на фиг. 6, с соответствующими поперечной и продольной направляющими, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
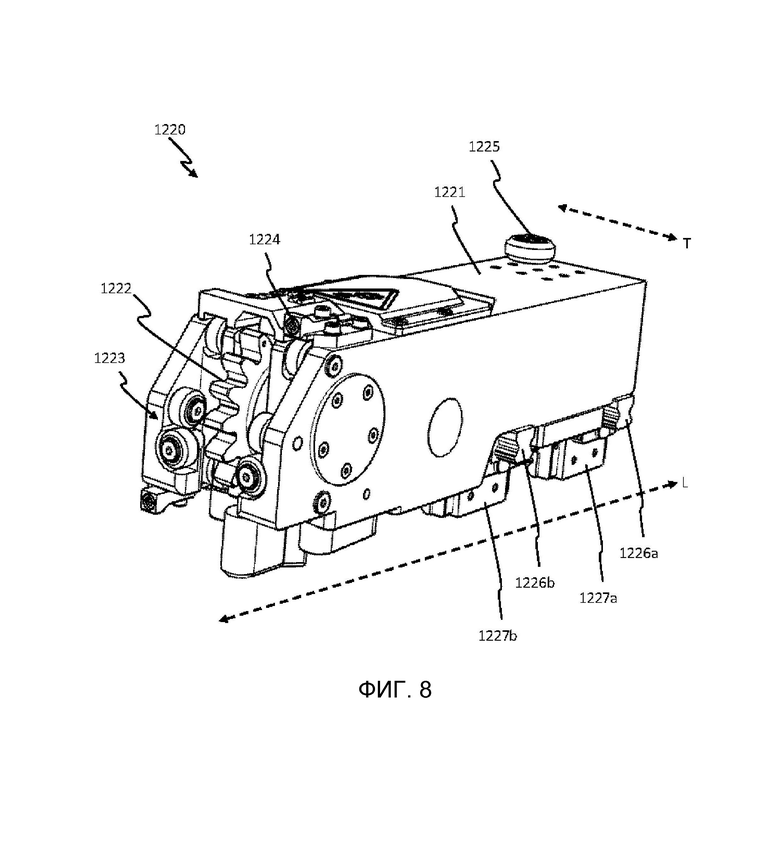
[056] На фиг. 8 представлен местный аксонометрический вид узла сцепления платформенного транспортного средства, показанной на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
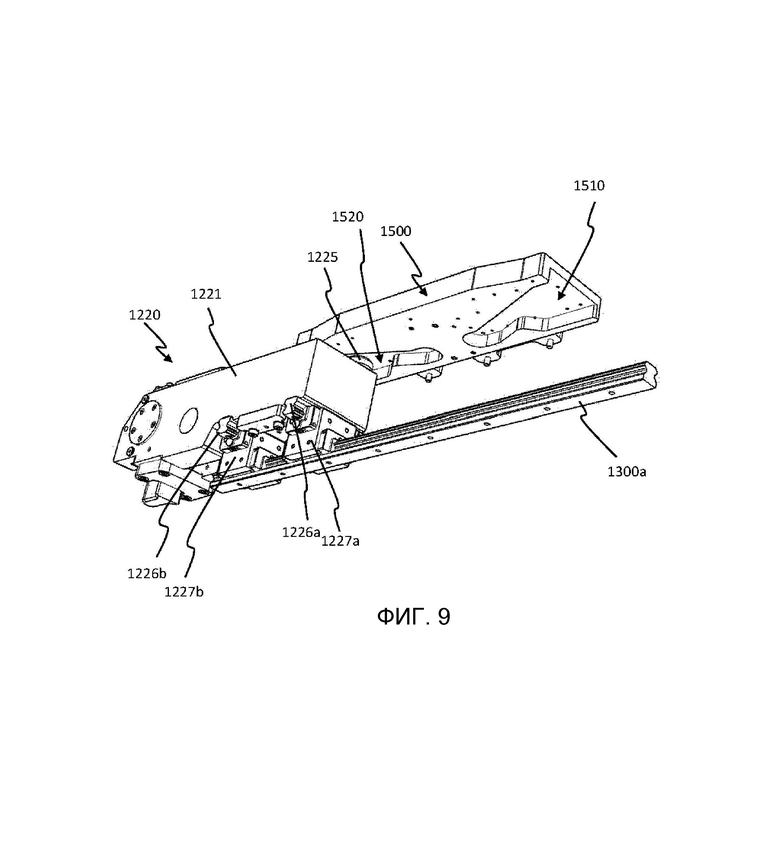
[057] На фиг. 9 представлен местный аксонометрический вид узла сцепления, показанного на фиг. 6, с соответствующими поперечной и продольной направляющими и с направляющим пазом, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
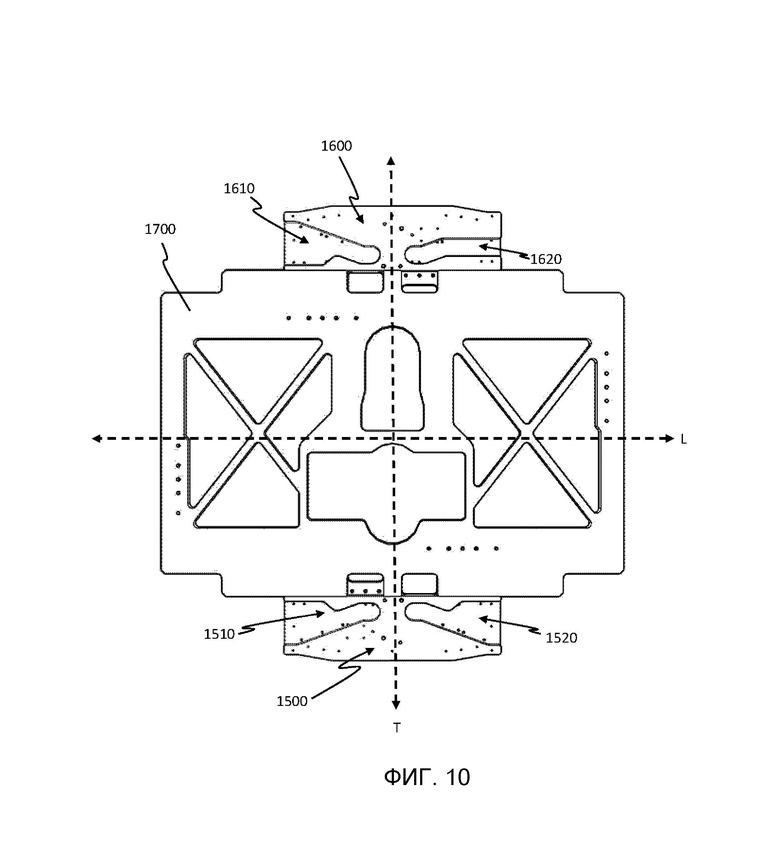
[058] На фиг. 10 представлены четыре направляющих паза платформенного транспортного средства, показанной на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
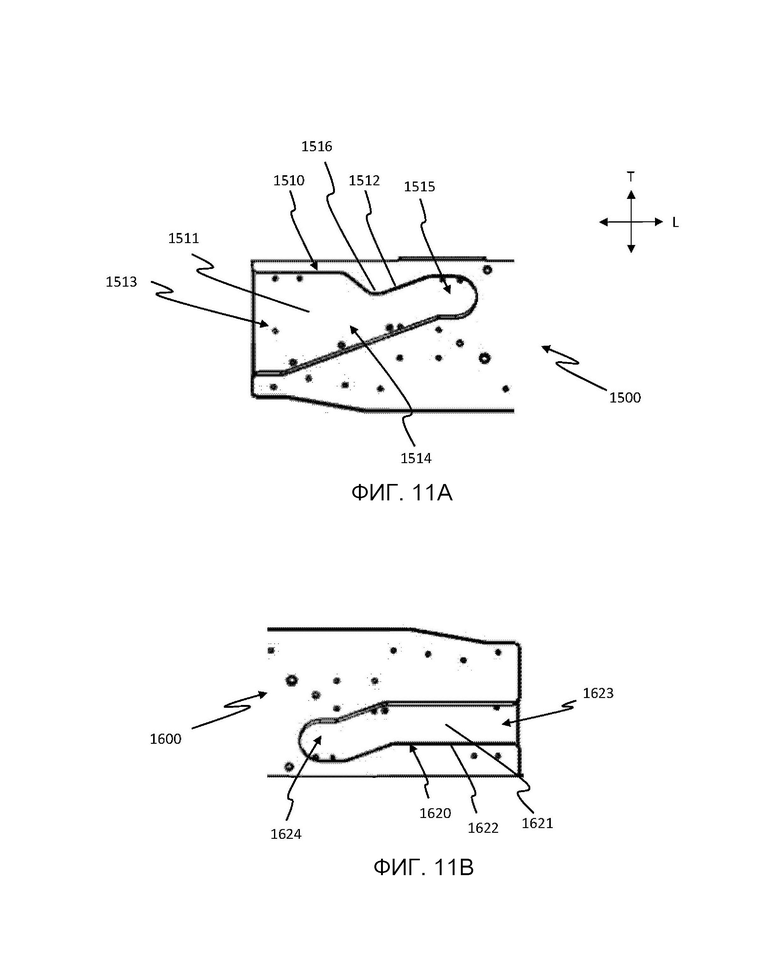
[059] На фиг. 11А и 11Б представлены подробные виды двух разных направляющих пазов платформенного транспортного средства, показанной на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Осуществление изобретения
[060] На фиг. 1 схематически представлен вид сверху склада 100 со стеллажами 101а, 101б и т.д., 102а, 102б и т.д., 103а, 103б и т.д. (называемыми здесь стеллажами 101, 102, 103) и тремя роботизированными транспортными средствами R. Как показано в не имеющем ограничительного характера примере на фиг. 1, стеллажи 101, 102, 103 могут располагаться рядами с проходами 120, 130, 140 между рядами. Специалистам в данной области техники должно быть понятно, что возможны любые количества и варианты расположения стеллажей 101, 102, 103 и роботизированных транспортных средств R.
[061] Роботизированные транспортные средства R могут перемещаться между стеллажами 101, 102, 103, передвигаясь в горизонтальной плоскости в проходах 120, 130, 140 по полу 110 склада 100. Как более подробно описано ниже, каждое роботизированное транспортное средство R имеет продольное направление L и поперечное направление T. В общем случае, согласно обычной ориентации роботизированных транспортных средств, продольное направление L и поперечное направление T можно считать фиксированными относительно склада 100, как показано на фиг. 1.
[062] На фиг. 2 схематически представлен вид сбоку роботизированного транспортного средства R между двумя стеллажами 102б, 103б, показанными на фиг. 1. Как видно на фиг. 2, стеллаж 102б имеет три полки или уровня 102б1, 102б2, 102б3, на которых могут храниться товары. Стеллаж 103б точно так же имеет три полки или уровня 103б1, 103б2, 103б3, на которых могут храниться другие товары. Специалистам в данной области техники должно быть понятно, что стеллажи 102б, 103б могут иметь любое количество полок или уровней и могут отличаться друг от друга по этому количеству.
[063] Роботизированное транспортное средство R расположено между двумя стеллажами 102б, 103б (в проходе 130 склада 100). Два стеллажа 102б, 103б расположены с противоположных сторон роботизированного транспортного средства R таким образом, чтобы оба стеллажа 102б, 103б были разнесены в продольном направлении L роботизированного транспортного средства R.
[064] Роботизированное транспортное средство R содержит верхнюю часть 1000 (называемую здесь платформенным транспортным средством 1000), съемно соединенную с нижней частью 2000. Нижняя часть 2000 может иметь колеса (не показаны), позволяющие роботизированному транспортному средству R (включая верхнюю часть 1000 и нижнюю часть 2000) передвигаться по полу 110 склада 100 в горизонтальной плоскости (например, для перемещения между стеллажами 101, 102, 103 и/или для транспортировки товаров).
[065] На фиг. 2 показано роботизированное транспортное средство R в состоянии, когда платформенное транспортное средство 1000 отсоединено от нижней части 2000 и поднята на стеллажи 102б, 103б в вертикальном направлении V. Специалистам в данной области техники должно быть понятно, что, как подробно описано ниже, платформенное транспортное средство 1000 может выборочно взаимодействовать с направляющими (не показаны) стеллажей 102б, 103б и за счет этого перемещаться вверх и вниз по стеллажам 102б, 103б.
[066] После расположения на высоте требуемой полки или на требуемом уровне стеллажа 102б или стеллажа 103б платформенное транспортное средство 1000 может забирать товары (например, с помощью рычага с захватом, не показан) с полки или уровня и размещать их на себе. После этого платформенное транспортное средство 1000 может опускаться в вертикальном направлении V и повторно соединяться с нижней частью 2000 для обеспечения возможности транспортировки товаров роботизированным транспортным средством R по складу 100 в горизонтальной плоскости.
[067] На фиг. 3 представлен аксонометрический вид платформенного транспортного средства 1000 роботизированного транспортного средства R в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[068] Платформенное транспортное средство 1000 может размещаться между двумя стеллажами (например, между стеллажом 102б и стеллажом 103б, показанными на фиг. 1 и 2) так, чтобы стеллажи 102б, 103б располагались с противоположных сторон платформенного транспортного средства 1000 и были разнесены в продольном направлении L платформенного транспортного средства 1000. В силу формы проходов, типичной для складов, а также для обеспечения максимальной грузоподъемности роботизированных транспортных средств R платформенное транспортное средство 1000, как правило, имеет по существу прямоугольную в плане форму и выполнено так, чтобы при ее эксплуатации короткие стороны этой прямоугольной формы располагались по существу параллельно стеллажам 102б, 103б. Таким образом, платформенное транспортное средство 1000 имеет продольное направление L (например, продольную ось упомянутой прямоугольной формы) и поперечное направление T (например, поперечную ось упомянутой прямоугольной формы). Специалистам в данной области техники должно быть понятно, что платформенное транспортное средство 1000 может иметь любую форму, при этом продольным направлением L в любом случае следует считать направление, проходящее между двумя противоположными стеллажами 102б, 103б, а поперечным направлением T - направление, перпендикулярное продольному направлению (и по существу параллельное полу 110 склада 100).
[069] Как показано на фиг. 3, платформенное транспортное средство 1000 содержит платформу 1100, которая имеет продольное направление L и поперечное направление T аналогично платформенному транспортному средству 1000. Платформа 1100 может быть по существу плоской и/или горизонтальной. Специалистам в данной области техники должно быть понятно, что платформа 1100 может использоваться для размещения на ней товаров. Платформа 1100 также может определять основной корпус платформенного транспортного средства 1000.
[070] К платформе 1100 могут быть прикреплены другие элементы платформенного транспортного средства 1000, многие из которых здесь не описываются подробно, поскольку они известны специалистам в данной области техники.
[071] Настоящая новая технология, в частности, относится к способу крепления платформенного транспортного средства 1000 к стеллажам 101, 102, 103 на складе 100. В частности, платформенное транспортное средство1000 содержит четыре узла 1210, 1220, 1230, 1240 сцепления (которые составляют часть системы сцепления, более подробно описанной ниже). Как более подробно описано ниже, каждый из четырех узлов 1210, 1220, 1230, 1240 сцепления способен взаимодействовать со стеллажами 101, 102, 103 склада 100.
[072] Первый узел 1210 сцепления и второй узел 1220 сцепления расположены с противоположных сторон платформы 1100 и разнесены в продольном направлении L. Аналогично, третий узел 1230 сцепления и четвертый узел 1240 сцепления расположены с противоположных сторон платформы 1100 и разнесены в продольном направлении L. Первый узел 1210 сцепления и второй узел 1220 сцепления разнесены с третьим узлом 1230 сцепления и четвертым узлом 1240 сцепления в поперечном направлении T платформы 1100. В общем случае четыре узла 1210, 1220, 1230, 1240 сцепления размещены по четырем углам платформы 1100.
[073] На фиг. 4 представлен аксонометрический вид платформенного транспортного средства 1000, показанной на фиг. 3, без нескольких элементов (в том числе без платформы 1100), который дает более наглядное представление о четырех узлах 1210, 1220, 1230, 1240 сцепления.
[074] Как показано на фиг. 4, платформенное транспортное средство 1000 содержит первую продольную направляющую 1300a. Первая продольная направляющая 1300a по существу расположена в продольном направлении L. Первая продольная направляющая 1300a находится в фиксированном положении относительно платформы 1100. Первый узел 1210 сцепления и второй узел 1220 сцепления установлены на первой продольной направляющей 1300a. Каждый из первого узла 1210 сцепления и второго узла 1220 сцепления способен перемещаться вдоль первой продольной направляющей 1300a. Соответственно, каждый из первого узла 1210 сцепления и второго узла 1220 сцепления способен перемещаться относительно платформы 1100 в продольном направлении L.
[075] Платформенное транспортное средство 1000 дополнительно содержит первый узел 1410 привода продольного разнесения. Как более подробно описано ниже, первый узел 1410 привода продольного разнесения соединен с каждым из первого узла 1210 сцепления и второго узла 1220 сцепления и способен выборочно перемещать первый узел 1210 сцепления и второй узел 1220 сцепления вдоль первой продольной направляющей 1300a (в продольном направлении L).
[076] В частности, первый узел 1410 привода продольного разнесения способен выборочно приводить в действие первый узел 1210 сцепления вдоль первой продольной направляющей 1300a таким образом, чтобы первый узел 1210 сцепления мог перемещаться между нейтральным положением (также называемым вдвинутым положением) и выдвинутым положением. Аналогично, первый узел 1410 привода продольного разнесения способен выборочно приводить в действие второй узел 1220 сцепления вдоль первой продольной направляющей 1300a таким образом, чтобы второй узел 1220 сцепления мог перемещаться между нейтральным положением (также называемым вдвинутым положением) и выдвинутым положением.
[077] Как описано ниже, первый узел 1410 привода продольного разнесения способен выборочно приводить в действие первый узел 1210 сцепления и второй узел 1220 сцепления одновременно. В частности, первый узел 1410 привода продольного разнесения выполнен таким образом, что первый узел 1210 сцепления и второй узел 1220 сцепления перемещаются под действием первого узла 1410 привода продольного разнесения приблизительно на одинаковое расстояние. В некоторых вариантах осуществления первый узел 1210 сцепления и второй узел 1220 сцепления способны сохранять одинаковое продольное расстояние от центральной точки (например, от осевой линии платформы 1100).
[078] При такой конфигурации первый узел 1410 привода продольного разнесения способен выборочно приводить в действие первый узел 1210 сцепления и второй узел 1220 сцепления вдоль первой продольной направляющей 1300a таким образом, чтобы первый узел 1210 сцепления и второй узел 1220 сцепления могли перемещаться между первым положением разнесения и вторым положением разнесения. Продольное расстояние (в продольном направлении L) между первым узлом 1210 сцепления и вторым узлом 1220 сцепления во втором положении разнесения может превышать такое расстояние в первом положении разнесения.
[079] В выдвинутом положении (или во втором положении разнесения) первый узел 1210 сцепления способен взаимодействовать с первым стеллажным элементом сцепления (не показан) первого стеллажа. При таком взаимодействии с первым стеллажным элементом сцепления может выполняться выборочный запуск первого двигателя 1210г привода, чтобы обеспечить подъем или опускание платформенного транспортного средства 1000 относительно первого стеллажа за счет приложения к ней силы, направленной вверх или вниз.
[080] В выдвинутом положении (или во втором положении разнесения) второй узел 1220 сцепления способен подобным образом взаимодействовать со вторым стеллажным элементом сцепления (не показан) второго стеллажа. При таком сцеплении со вторым стеллажным элементом сцепления может выполняться выборочный запуск второго двигателя 1220г привода, чтобы обеспечить подъем или опускание платформенного транспортного средства 1000 относительно второго стеллажа за счет приложения к ней силы, направленной вверх или вниз.
[081] Как правило, первый двигатель 1210г привода и второй двигатель 1220г привода приводятся в действие таким образом, чтобы платформенное транспортное средство 1000 сохраняло по существу горизонтальный уровень при подъеме или опускании по стеллажам.
[082] Третий узел 1230 сцепления и четвертый узел 1240 сцепления аналогичны первому узлу 1210 сцепления и второму узлу 1220 сцепления, соответственно, и поэтому отдельно не рассматриваются.
[083] На фиг. 5 представлен аксонометрический вид платформенного транспортного средства 1000, на котором первый узел 1210 сцепления и второй узел 1220 сцепления скрыты, чтобы более подробно показать первый узел 1410 привода продольного разнесения. Первый узел 1410 привода продольного разнесения может быть зафиксирован относительно платформы 1100. Первый узел 1410 привода продольного разнесения по существу расположен в продольном направлении. Первый узел 1410 привода продольного разнесения расположен ближе к поперечной стороне платформенного транспортного средства 1000. Как показано на фиг. 5, первый узел 1410 привода продольного разнесения может располагаться ниже первого узла 1210 сцепления и второго узла 1220 сцепления, тем не менее, возможны и другие варианты расположения. В частности, первый узел 1410 привода продольного разнесения может располагаться сбоку (например, с внутренней или наружной стороны) или сверху первого узла 1210 сцепления и второго узла 1220 сцепления.
[084] Платформенное транспортное средство 1000 содержит второй узел 1420 привода продольного разнесения. Второй узел 1420 привода продольного разнесения, аналогичный по конструкции и функциям первому узлу 1410 привода продольного разнесения, соединен с третьим узлом 1230 сцепления и с четвертым узлом 1240 сцепления и способен выборочно перемещать третий узел 1230 сцепления и четвертый узел 1240 сцепления вдоль второй продольной направляющей 1300б (в продольном направлении L).
[085] На фиг. 6 представлен местный аксонометрический вид третьего узла 1230 сцепления и четвертого узла 1240 сцепления вместе со второй продольной направляющей 1300б и вторым узлом 1420 привода продольного разнесения. Второй узел 1420 привода продольного разнесения представляет собой шарико-винтовую передачу, способную выборочно перемещать третий узел 1230 сцепления и четвертый узел 1240 сцепления вдоль второй продольной направляющей 1300б в противоположных направлениях.
[086] Второй узел 1420 привода продольного разнесения содержит двигатель 1421 (например, электродвигатель), способный выборочно приводить в движение стержень 1422 шарикового винта. Стержень 1422 шарикового винта расположен между двигателем 1421 и опорой 1423. Двигатель 1421 и опора 1423 могут быть зафиксированы относительно платформы 1100 таким образом, чтобы стержень 1422 шарикового винта мог лишь вращаться относительно платформы 1100.
[087] Стержень 1422 шарикового винта имеет две противоположные винтовые резьбы (не показаны), при этом третий узел 1230 сцепления взаимодействует с первой из двух противоположных винтовых резьб, а четвертый узел 1240 сцепления - со второй из двух противоположных винтовых резьб. При таком расположении третий узел 1230 сцепления и четвертый узел 1240 сцепления при вращении стержня 1422 шарикового винта двигателем 1421 приводятся в движение или перемещаются в противоположных направлениях (либо друг от друга при вращении стержня 1422 шарикового винта в одном направлении, либо друг к другу при вращении стержня 1422 шарикового винта в противоположном направлении).
[088] Третий узел 1230 сцепления взаимодействует с соответствующей винтовой резьбой благодаря узлу 1424 шариковой гайки. Узел 1424 шариковой гайки зафиксирован относительно третьего узла 1230 сцепления таким образом, чтобы перемещение узла 1424 шариковой гайки вдоль стержня 1422 шарикового винта приводило к перемещению третьего узла 1230 сцепления.
[089] Четвертый узел 1240 сцепления аналогично взаимодействует с соответствующей винтовой резьбой благодаря узлу 1425 шариковой гайки. Узел 1425 шариковой гайки зафиксирован относительно четвертого узла 1240 сцепления таким образом, чтобы перемещение узла 1424 шариковой гайки вдоль стержня 1422 шарикового винта приводило к соответствующему перемещению четвертого узла 1240 сцепления.
[090] Платформенное транспортное средство 1000 выполнено таким образом, что продольное перемещение третьего узла 1230 сцепления и четвертого узла 1240 сцепления осуществляется симметрично относительно оси симметрии, проходящей в поперечном направлении через центр платформы 1100. Таким образом, при любом расположении третьего узла 1230 сцепления и четвертого узла 1240 сцепления вдоль второй продольной направляющей 1300б продольные расстояния от центра платформы 1100 до третьего узла 1230 сцепления в выдвинутом положении и до четвертого узла 1240 сцепления в выдвинутом положении одинаковы. Соответственно, платформа 1100 сохраняет центральное положение между третьим узлом 1230 сцепления и четвертым узлом 1240 сцепления независимо от их расположения.
[091] Первый узел 1210 сцепления и второй узел 1220 сцепления в сочетании с первой продольной направляющей 1300a и первым узлом 1410 привода продольного разнесения аналогичны по конструкции и функциям вышеописанным третьему узлу 1230 сцепления и четвертому узлу 1240 сцепления в сочетании со второй продольной направляющей 1300б и вторым узлом 1420 привода продольного разнесения. Соответственно, их описание опущено для краткости.
[092] На фиг. 7 представлен местный аксонометрический вид второго узла 1220 сцепления вместе с (частью) первой продольной направляющей 1300a и узлом 1226 поперечных направляющих.
[093] Узел 1226 поперечных направляющих способен направлять второй узел 1220 сцепления в поперечном направлении T платформы 1100. В примере, показанном на фиг. 7, узел 1226 поперечных направляющих содержит две поперечные направляющие 1226a, 1226б. Каждая из поперечных направляющих 1226a, 1226б расположена в поперечном направлении T и разнесена с другой поперечной направляющей в продольном направлении L. Каждая из поперечных направляющих 1226a, 1226б зафиксирована относительно второго узла 1220 сцепления таким образом, что второй узел 1220 сцепления и поперечные направляющие 1226a, 1226б движутся синхронно.
[094] Поперечные направляющие 1226a, 1226б размещены в блоках 1227a, 1227б направляющих, соответственно. Каждый из блоков 1227a, 1227б направляющих имеет поперечное углубление для размещения в нем с возможностью скольжения соответствующей направляющей из поперечных направляющих 1226a, 1226б. Каждое поперечное углубление расположено в поперечном направлении T. При такой конфигурации узел 1226 поперечных направляющих способен направлять скользящим образом второй узел 1220 сцепления в поперечном направлении T.
[095] Каждый из блоков 1227a, 1227б направляющих также имеет продольное углубление, обеспечивающее размещение в нем с возможностью скольжения первой продольной направляющей 1300a. Каждое продольное углубление расположено в продольном направлении L (то есть поперечное углубление и продольное углубление перпендикулярны друг другу). При такой конфигурации первая продольная направляющая 1300a способна направлять скользящим образом второй узел 1220 сцепления в продольном направлении L.
[096] Первая продольная направляющая 1300a и/или поперечные направляющие 1226a, 1226б могут дополнительно иметь упоры для предотвращения ухода второго узла 1220 сцепления за максимальное и/или минимальное продольное положение и/или за максимальное и/или минимальное поперечное положение. Дополнительно или в качестве альтернативы, платформенное транспортное средство может содержать направляющий паз, способный ограничивать продольное и/или поперечное перемещение второго узла 1220 сцепления. Ниже приведено более подробное описание применения направляющего паза.
[097] Первая продольная направляющая 1300a и узел 1226 поперечных направляющих функционируют независимо друг от друга. Соответственно, второй узел 1220 сцепления способен независимо перемещаться в продольном направлении L и в поперечном направлении T.
[098] В примере, показанном на фиг. 7, представлены два блока 1227a, 1227б направляющих. В других примерах для размещения обеих поперечных направляющих 1226a, 1226б может использоваться один блок направляющих.
[099] Первый узел 1210 сцепления, третий узел 1230 сцепления и четвертый узел 1240 сцепления направляются соответствующими продольными направляющими и узлами поперечных направляющих тем же способом, что описан выше применительно ко второму узлу 1220 сцепления. Соответственно, их описание опущено для краткости.
[100] На фиг. 7 также показаны подробности второго узла 1220 сцепления, при этом соответствующие элементы присутствуют в каждом из первого узла 1210 сцепления, третьего узла 1230 сцепления и четвертого узла 1240 сцепления. Их описание приведено ниже со ссылкой на фиг. 8, на которой представлен еще один местный вид второго узла 1220 сцепления.
[101] Второй узел 1220 сцепления имеет корпус 1221 узла сцепления. Корпус 1221 узла сцепления может быть выполнен как основной корпус второго узла 1220 сцепления, в котором закреплены и/или размещены другие элементы. Корпус 1221 узла сцепления имеет по существу кубическую форму, продольная ось которого совпадает с продольным направлением L.
[102] Второй узел 1220 сцепления также содержит ролик 1225. Ролик 1225 прикреплен с возможностью его вращения к верхней стороне корпуса узла 1221 взаимодействия. Как более подробно описано ниже, ролик 1225 предназначен для размещения в направляющем пазу, ограничивающем перемещение второго узла 1220 сцепления.
[103] Как показано на фиг. 8, второй узел 1220 сцепления дополнительно содержит зубчатое колесо 1222. Зубчатое колесо 1222 способно взаимодействовать с соответствующим стеллажным элементом сцепления (не показан) стеллажа 101, 102 или 103 на складе 100. Стеллажный элемент сцепления может представлять собой зубчатую рейку. Зубчатое колесо 1222 и стеллажный элемент сцепления могут образовывать реечную передачу.
[104] Зубчатое колесо 1222 может выборочно вращаться двигателем 1220г (в обоих направлениях). Таким образом, когда зубчатое колесо 1222 взаимодействует со стеллажным элементом сцепления, к платформенному транспортному средству 1000 может прикладываться сила, направленная вверх или вниз.
[105] Второй узел 1220 сцепления также содержит роликовый узел 1223 сцепления. Роликовый узел 1223 сцепления способен выравнивать зубчатое колесо 1222 со стеллажным элементом сцепления (например, с зубчатой рейкой) при взаимодействии второго узла 1220 сцепления с этим стеллажным элементом сцепления. Кроме того, роликовый узел 1223 сцепления способен поддерживать зубчатое колесо 1222 и стеллажный элемент сцепления (например, зубчатую рейку) в выровненном состоянии при подъеме и опускании второго узла 1220 сцепления (и платформенного транспортного средства 1000 в целом) по стеллажу 101, 102 или 103.
[106] Как более подробно описано ниже, роликовый узел 1223 сцепления также способен передавать усилия от стеллажа (например, от стеллажного элемента сцепления) на второй узел 1220 сцепления в продольном направлении L и в поперечном направлении T.
[107] Роликовый узел 1223 сцепления может содержать любое количество роликов, включая единственный ролик.
[108] Второй узел 1220 сцепления дополнительно содержит детектор 1224. Детектор 1224 способен обнаруживать вхождение второго узла 1220 сцепления (в частности, зубчатого колеса 1222 и/или роликового узла 1223 сцепления) во взаимодействие со стеллажным элементом сцепления. Детектор 1224 может представлять собой индукционный датчик, контактный датчик и т.д.
[109] Как описано ниже, когда по меньшей мере один детектор 1224 фиксирует, что второй узел 1220 сцепления вошел во взаимодействие со стеллажным элементом сцепления, первый узел 1410 привода продольного разнесения прекращает приводить в движение второй узел 1220 сцепления.
[110] Ниже приведено описание функционирования платформенного транспортного средства 1000.
[111] Роботизированное транспортное средство R располагается (например, с использованием колес роботизированного транспортного средства R) между двумя стеллажами (например, между стеллажами 102б и 103б, как показано на фиг. 2) так, чтобы первый узел 1210 сцепления оказывался по существу выровненным (в поперечном направлении T) со стеллажным элементом сцепления первого стеллажа, второй узел 1220 сцепления - по существу выровненным (в поперечном направлении T) со стеллажным элементом сцепления второго стеллажа, третий узел 1230 сцепления - по существу выровненным (в поперечном направлении T) с другим стеллажным элементом сцепления первого стеллажа, а четвертый узел 1240 сцепления - по существу выровненным (в поперечном направлении T) с другим стеллажным элементом сцепления второго стеллажа. При этом платформенное транспортное средство 1000 входит во взаимодействие с нижней частью 2000.
[112] Затем приводится в действие первый узел 1410 привода продольного разнесения, чтобы обеспечить выдвижение первого узла 1210 сцепления и второго узла 1220 сцепления наружу (в продольном направлении L) из вдвинутого или нейтрального положения. Первый узел 1210 сцепления и второй узел 1220 сцепления направляются вдоль первой продольной направляющей 1300a.
[113] Когда детекторы (например, детектор 1224 второго узла 1220 сцепления) фиксируют, что узлы 1210, 1220 сцепления вошли во взаимодействие с соответствующими стеллажными элементами сцепления, первый узел 1410 привода продольного разнесения прекращает выдвигать эти узлы сцепления наружу. В этом положении каждое зубчатое колесо (например, зубчатое колесо 1222 второго узла 1220 сцепления) успешно взаимодействует с соответствующим стеллажным элементом сцепления (например, с зубчатой рейкой, которая не показана).
[114] Дополнительно роботизированное транспортное средство R может быть поднято на некоторый начальный уровень (например, с помощью двигателей 1210г, 1220г, 1230г, 1240г привода), при этом за счет работы первого узла 1410 привода продольного разнесения и/или второго узла 1420 привода продольного разнесения предотвращается продольное смещение узлов сцепления 1210, 1220, 1230, 1240. Такое начальное перемещение позволяет роликовым узлам сцепления каждого из узлов 1210, 1220, 1230, 1240 сцепления (например, роликовому узлу 1223 взаимодействия) входить во взаимодействие с соответствующими направляющими стеллажей. После этого первый узел 1410 привода продольного разнесения и/или второй узел 1420 привода продольного разнесения могут прекращать работу.
[115] Поскольку первый узел 1410 привода продольного разнесения в таком положении не действует (не приводится в действие или в движение), каждый из первого узла 1210 сцепления и второго узла 1220 сцепления может свободно перемещаться вдоль первой продольной направляющей 1300a (например, после описанного выше начального подъема роботизированного транспортного средства R). В некоторых вариантах осуществления, когда первый узел 1410 привода продольного разнесения не действует, каждый из первого узла 1210 сцепления и второго узла 1220 сцепления может свободно перемещаться вдоль первой продольной направляющей 1300a при незначительном сопротивлении или при отсутствии сопротивления со стороны первого узла 1410 привода продольного разнесения.
[116] Второй узел 1420 привода продольного разнесения подобным образом приводит в действие третий узел 1230 сцепления и четвертый узел 1240 сцепления.
[117] После вхождения всех четырех узлов 1210, 1220, 1230, 1240 сцепления во взаимодействие с соответствующими стеллажными элементами сцепления платформенное транспортное средство 1000 может отсоединиться от нижней части 2000. После этого двигатели (например, двигатель 1220г) приводят в движение соответствующие зубчатые колеса (например, зубчатое колесо 1222 второго узла 1220 сцепления), обеспечивая подъем платформенного транспортного средства 1000.
[118] Поскольку в таком состоянии все четыре узла 1210, 1220, 1230, 1240 сцепления могут свободно перемещаться в продольном направлении L вдоль соответствующих продольных направляющих 1300a, 1300б, любой относительный вертикальный наклон стеллажей 101, 102, 103 приводит к перемещению узлов 1210, 1220, 1230, 1240 сцепления в продольном направлении L вдоль продольных направляющих 1300a, 1300б. Таким образом, четыре узла 1210, 1220, 1230, 1240 сцепления способны надежно сохранять взаимодействие со стеллажными элементами сцепления даже в случае вертикального наклона одного или нескольких стеллажей.
[119] Когда узлы 1210, 1220, 1230, 1240 сцепления взаимодействуют с узлами 1410, 1420 привода продольного разнесения, которые выполнены в виде шарико-винтовой передачи, платформенное транспортное средство 1000 может удерживаться в центральном положении в продольном направлении L между двумя стеллажами. Это позволяет снизить вероятность столкновения платформенного транспортного средства 1000 со стеллажами или с хранящимися на них товарами.
[120] Первый узел 1210 сцепления и второй узел 1220 сцепления перемещаются независимо от третьего узла 1230 сцепления и четвертого узла 1240 сцепления. Например, когда узлы 1410, 1420 привода продольного разнесения не действуют (например, пока платформенное транспортное средство 1000 поднимается или опускается по стеллажам), первый узел 1210 сцепления и второй узел 1220 сцепления могут позиционироваться независимо от третьего узла 1230 сцепления и четвертого узла 1240 сцепления. Благодаря этому платформенное транспортное средство 1000 может взаимодействовать с перекошенными по горизонтали стеллажами и подниматься или опускаться по ним. Например, у стеллажей с перекосом по горизонтали стеллажные элементы сцепления на одной горизонтальной стороне могут располагаться ближе к платформенному транспортному средству 1000, чем стеллажные элементы сцепления на другой горизонтальной стороне. Поскольку первый узел 1210 сцепления и второй узел 1220 сцепления могут позиционироваться независимо от третьего узла 1230 сцепления и четвертого узла 1240 сцепления, такой перекос является допустимым во время вертикального перемещения платформенного транспортного средства 1000.
[121] По мере подъема или опускания платформенного транспортного средства 1000 по стеллажам один или несколько стеллажных элементов сцепления могут смещаться, деформироваться или изгибаться в поперечном направлении T. При этом, поскольку каждый из узлов 1210, 1220, 1230, 1240 сцепления имеет возможность перемещаться в поперечном направлении T вдоль поперечных направляющих 1226a, 1226б, четыре узла 1210, 1220, 1230, 1240 сцепления способны надежно сохранять взаимодействие со стеллажными элементами сцепления даже в том случае, если один или несколько узлов стеллажных элементов сцепления и/или стеллажей деформированы и/или изогнуты по горизонтали.
[122] С учетом вышеизложенного, в общем случае, когда узлы 1210, 1220, 1230, 1240 сцепления взаимодействуют со стеллажными элементами сцепления (например, выполненными в виде реечной передачи) и платформенное транспортное средство 1000 движется по вертикали, по меньшей мере некоторые или все узлы 1210, 1220, 1230, 1240 сцепления способны перемещаться в продольном направлении L и в поперечном направлении T при смещении стеллажных элементов сцепления в продольном направлении L и поперечном направлении T.
[123] На фиг. 9 представлен местный аксонометрический вид второго узла 1220 сцепления на первой продольной направляющей 1300a. На фиг. 9 показан дополнительный первый направляющий узел 1500. В других примерах первый направляющий узел 1500 может отсутствовать. Для более наглядного представления первого направляющего узла 1500 первый узел 1210 сцепления на фиг. 9 скрыт.
[124] В общем случае первый направляющий узел 1500 способен ограничивать перемещение первого узла 1210 сцепления и второго узла 1220 сцепления вдоль соответствующих поперечных направляющих и первой продольной направляющей 1300a.
[125] Первый направляющий узел 1500 содержит первый направляющий паз 1510, способный ограничивать перемещение первого узла 1210 сцепления, и второй направляющий паз 1520, способный ограничивать перемещение второго узла 1220 сцепления. Как показано на фиг. 9, первый направляющий паз 1510 и второй направляющий паз 1520 не перекрываются. Первый направляющий паз 1510 и второй направляющий паз 1520 зафиксированы относительно платформы 1100.
[126] Как отмечалось выше, второй узел 1220 сцепления содержит ролик 1225, выполненный с возможностью его размещения во втором направляющем пазе 1520. Форма второго направляющего паза 1520 с роликом 1225 обеспечивает ограничение перемещения второго узла 1220 сцепления.
[127] Платформенное транспортное средство 1000 также содержит второй направляющий узел 1600, как показано на фиг. 10. Первый направляющий узел 1500 и второй направляющий узел 1600 неподвижно соединены друг с другом посредством рамы 1700. Рама может быть неподвижно соединена с платформой 1100. Соответственно, в общем случае как первый направляющий узел 1500, так и второй направляющий узел 1600 зафиксированы относительно платформы 1100.
[128] Второй направляющий узел 1600 содержит третий направляющий паз 1610 и четвертый направляющий паз 1620. Третий направляющий паз 1610, аналогично первому направляющему пазу 1510 и второму направляющему пазу 1520, способна ограничивать перемещение третьего узла 1230 сцепления. Четвертый направляющий паз 1620, аналогично первому направляющему пазу 1510 и второму направляющему пазу 1520, способен ограничивать перемещение четвертого узла 1240 сцепления, при этом, как описано ниже, форма четвертого направляющего паза 1620 отличается от формы первого направляющего паза 1510, второго направляющего паза 1520 и третьего направляющего паза 1610.
[129] Первый направляющий паз 1510 и второй направляющий паз 1520 по существу симметричны относительно оси симметрии, которая проходит в поперечном направлении T через центр платформы 1100.
[130] Первый направляющий паз 1510 и третий направляющий паз 1610 по существу симметричны относительно оси симметрии, которая проходит в продольном направлении L через центр платформы 1100.
[131] Направляющие пазы 1510, 1520, 1610, 1620 способны ограничивать перемещение соответствующих узлов 1210, 1220, 1230, 1240 сцепления таким образом, что при перемещении узла 1210, 1220, 1230 или 1240 сцепления в его нейтральное положение в продольном направлении L соответствующий направляющий паз 1510, 1520, 1610 или 1620 направляет узел 1210, 1220, 1230 или 1240 сцепления к его нейтральному положению в поперечном направлении T.
[132] Например, при перемещении первого узла 1210 сцепления из выдвинутого положения во вдвинутое или нейтральное положение в продольном направлении L (например, под действием первого узла 1410 привода продольного разнесения) первый направляющий паз 1510 направляет первый узел 1210 сцепления к его нейтральному положению в поперечном направлении T.
[133] На фиг. 11A показан вид в увеличенном масштабе первого направляющего паза 1510, выполненного в первом направляющем узле 1500. Первый направляющий паз 1510 имеет дно 1511, которое является по существу плоским. Дно 1511 ограничено стенкой 1512 первого направляющего паза 1510. Стенка 1512 способна прилегать к ролику 1225 и за счет этого способна направлять ролик 1225 (и первый узел 1210 сцепления в целом). Таким образом, стенка 1512 и ролик 1225 определяют ограниченную область, в пределах которой возможно перемещение первого узла 1210 сцепления.
[134] Стенка 1512 может быть незамкнутой и первый направляющий паз 1510, соответственно, может иметь открытый участок 1513 для обеспечения входа ролика 1225 в первый направляющий узел 1510 и выхода его оттуда. Таким образом, ролик 1225 может выходить наружу из первого направляющего паза 1510. При этом в некоторых примерах перемещение первого узла 1210 сцепления также ограничивается поперечными направляющими 1226a, 1226б и/или первой продольной направляющей 1330a (например, описанным выше способом с использованием упоров на направляющих) и/или ограничителями в любой другой части роботизированного транспортного средства R, например, в раме 1700. Соответственно, открытый участок 1513 может иметь поперечную ширину (в поперечном направлении T), равную максимальному поперечному смещению ролика 1225 или превышающую его. Таким образом, при отведении первого узла 1210 сцепления в конечном счете обеспечивается вхождение ролика 1225 в первый направляющий узел 1510.
[135] Первый направляющий паз 1510 также имеет сужающуюся часть 1514. Поперечное расстояние между сторонами стенки 1512 в сужающейся части 1514 уменьшается по мере приближения к центральной точке платформы 1100. Благодаря сужающейся части 1514 поперечное смещение первого узла 1210 сцепления при его перемещении из выдвинутого положения во вдвинутое или нейтральное положение в продольном направлении L ограничивается более узким поперечным участком.
[136] Первый направляющий паз 1510 также имеет нейтральную часть 1515. Нейтральная часть 1515 представляет собой часть первого направляющего паза 1510, расположенную ближе всего к центральной точке платформы 1100 в продольном направлении. Когда ролик 1225 находится в нейтральной части 1515, первый узел 1210 сцепления занимает нейтральное положение (как в продольном направлении L, так и в поперечном направлении T).
[137] Стенка 1511 первого направляющего паза 1510 также образует зубец 1516. Этот зубец расположен так, что ролик 1225 при перемещении из нейтральной части 1515 наружу и выходе из открытого участка 1513 выравнивается в поперечном направлении с центральной частью открытого участка 1513. В некоторых примерах зубец расположен так, что ролик 1225 при перемещении из нейтральной части 1515 наружу и выходе из открытого участка 1513 выравнивается в поперечном направлении с центральной точкой открытого участка 1513.
[138] Второй направляющий паз 1520 и третий направляющий паз 1610 аналогичны первому направляющему пазу 1510, поэтому их описание опущено для краткости.
[139] На фиг. 11Б показан вид в увеличенном масштабе четвертого направляющего паза 1620, выполненного во втором направляющем узле 1600. Четвертый направляющий паз 1620 имеет дно 1621, которое по существу является плоским. Дно 1621 ограничено стенкой 1622 четвертого направляющего паза 1620. Стенка 1622 способна прилегать к ролику четвертого узла 1240 сцепления и за счет этого способна направлять ролик (и четвертый узел 1240 сцепления в целом). Таким образом, стенка 1622 и ролик определяют ограниченную область, в пределах которой возможно перемещение четвертого узла 1240 сцепления.
[140] В общем случае четвертый направляющий паз 1620 ограничивает перемещение четвертого узла 1240 сцепления в большей степени, чем другие направляющие пазы 1510, 1520, 1610 с соответствующими узлами 1210, 1220, 1230 сцепления.
[141] В частности, открытый участок 1623 четвертого направляющего паза 1620 в поперечном направлении, чем открытый участок 1513 первого направляющего паза 1510. Открытый участок 1623 может иметь поперечную ширину, равную (с допуском) ширине ролика четвертого узла 1240 сцепления. В других примерах стенка 1622 четвертого направляющего паза 1620 может быть замкнутой и, таким образом, не допускать выхода ролика четвертого узла 1240 сцепления из четвертого направляющего паза 1620.
[142] Четвертый направляющий паз 1620 также имеет нейтральную часть 1624. Нейтральная часть 1624 представляет собой часть четвертого направляющего паза 1620, расположенную ближе всего к центральной точке платформы 1100 в продольном направлении. Когда ролик 1225 находится в нейтральной части 1624, четвертый узел 1240 сцепления занимает нейтральное положение (как в продольном направлении L, так и в поперечном направлении T).
[143] Как показано на фиг. 11Б, поперечная ширина четвертого направляющего паза 1620 примерно одинакова по всей длине четвертого направляющего паза 1620. Поперечная ширина может быть равна (с допуском) ширине ролика четвертого узла 1240 сцепления. При такой конструкции четвертый узел 1240 сцепления в каждом конкретном продольном положении может занимать только одно поперечное положение.
[144] Как показано на фиг. 10, нейтральные части (не обозначены) первого направляющего паза 1510 и второго направляющего паза 1520 приблизительно выровнены в поперечном направлении. Соответственно, нейтральное положение первого узла 1210 сцепления и нейтральное положение второго узла 1220 сцепления также выровнены в поперечном направлении.
[145] Нейтральные части (не обозначены) третьего направляющего паза 1610 и четвертого направляющего паза 1620 приблизительно выровнены в поперечном направлении. Соответственно, нейтральное положение третьего узла 1230 сцепления и нейтральное положение четвертого узла 1240 сцепления также выровнены в поперечном направлении.
[146] Нейтральные части (не обозначены) первого направляющего паза 1510 и второго направляющего паза 1520 смещены в противоположные стороны относительно центральной точки платформы 1100 в продольном направлении L на одинаковое расстояние. Соответственно, нейтральное положение первого узла 1210 сцепления и нейтральное положение второго узла 1220 сцепления смещены в противоположные стороны относительно центральной точки платформы 1100 в продольном направлении L на одинаковое расстояние.
[147] Нейтральные части (не обозначены) третьего направляющего паза 1610 и четвертого направляющего паза 1620 смещены в противоположные стороны относительно центральной точки платформы 1100 в продольном направлении L на одинаковое расстояние. Соответственно, нейтральное положение третьего узла 1230 сцепления и нейтральное положение четвертого узла 1240 сцепления смещены в противоположные стороны относительно центральной точки платформы 1100 в продольном направлении L на одинаковое расстояние.
[148] Ниже приведено описание функционирования платформенного транспортного средства 1000 с дополнительными направляющими узлами 1500, 1600.
[149] Роботизированное транспортное средство R располагается (например, с использованием колес роботизированного транспортного средства R) между двумя стеллажами (например, между стеллажами 102б и 103б, как показано на фиг. 2) так, чтобы первый узел 1210 сцепления оказывался по существу выровненным (в поперечном направлении T) со стеллажным элементом сцепления первого стеллажа, второй узел 1220 сцепления - по существу выровненным (в поперечном направлении T) со стеллажным элементом сцепления второго стеллажа, третий узел 1230 сцепления - по существу выровненным (в поперечном направлении T) с другим стеллажным элементом сцепления первого стеллажа и четвертый узел 1240 сцепления - по существу выровненным (в поперечном направлении T) с другим стеллажным элементом сцепления второго стеллажа. При этом платформенное транспортное средство 1000 входит во взаимодействие с нижней частью 2000.
[150] Затем приводится в действие первый узел 1410 привода продольного разнесения, чтобы обеспечить выдвижение первого узла 1210 сцепления и второго узла 1220 сцепления наружу (в продольном направлении L) из вдвинутого положения. Первый узел 1210 сцепления и второй узел 1220 сцепления направляются вдоль первой продольной направляющей 1300a.
[151] Когда детекторы (например, детектор 1224 второго узла 1220 сцепления) фиксируют, что узлы 1210, 1220 сцепления вошли во взаимодействие с соответствующими стеллажными элементами сцепления, первый узел 1410 привода продольного разнесения прекращает работу. В этом положении каждое зубчатое колесо (например, зубчатое колесо 1222 второго узла 1220 сцепления) успешно взаимодействует с соответствующим стеллажным элементом сцепления (например, с зубчатой рейкой, которая не показана).
[152] Поскольку первый узел 1410 привода продольного разнесения в таком положении не действует (не приводится в действие или движение), каждый из первого узла 1210 сцепления и второго узла 1220 сцепления может свободно перемещаться вдоль первой продольной направляющей 1300a. В некоторых вариантах осуществления, когда первый узел 1410 привода продольного разнесения не действует, каждый из первого узла 1210 сцепления и второго узла 1220 сцепления может свободно перемещаться вдоль первой продольной направляющей 1300a при незначительном сопротивлении или при отсутствии сопротивления со стороны первого узла 1410 привода продольного разнесения.
[153] Второй узел 1420 привода продольного разнесения подобным образом приводит в действие третий узел 1230 сцепления и четвертый узел 1240 сцепления.
[154] После вхождения всех четырех узлов 1210, 1220, 1230, 1240 сцепления во взаимодействие с соответствующими стеллажными элементами сцепления платформенное транспортное средство 1000 может отсоединиться от нижней части 2000. После этого двигатели (например, двигатель 1220г) приводят в движение соответствующие зубчатые колеса (такие как зубчатое колесо 1222 второго узла 1220 сцепления), чтобы обеспечить подъем платформенного транспортного средства 1000.
[155] Поскольку в таком состоянии все четыре узла 1210, 1220, 1230, 1240 сцепления могут свободно перемещаться в продольном направлении L вдоль соответствующих продольных направляющих 1300a, 1300б, любой относительный вертикальный наклон стеллажей 101, 102, 103 приводит к перемещению узлов 1210, 1220, 1230, 1240 сцепления в продольном направлении L вдоль продольных направляющих 1300a, 1300б. Таким образом, четыре узла 1210, 1220, 1230, 1240 сцепления способны надежно сохранять взаимодействие со стеллажными элементами сцепления даже в случае вертикального наклона одного или нескольких стеллажей.
[156] После забора или размещения всех необходимых товаров платформенное транспортное средство 1000 опускается по стеллажам и повторно прикрепляется к нижней части 2000. Четыре узла 1210, 1220, 1230, 1240 сцепления выводятся из взаимодействия с соответствующими стеллажными элементами сцепления. Четыре узла 1210, 1220, 1230, 1240 сцепления отводятся из выдвинутых положений в нейтральные положения. При отведении четырех узлов 1210, 1220, 1230, 1240 сцепления соответствующие направляющие пазы 1510, 1520, 1610, 1620 ограничивают перемещение этих узлов таким образом, чтобы они вернулись в нейтральное положение (в котором ролики размещаются в нейтральных частях направляющих пазов 1510, 1520, 1610, 1620).
[157] После этого роботизированное транспортное средство R может перемещаться в другое место между двумя стеллажами (например, между стеллажами 101г и 102г). Благодаря направляющим пазам 1510, 1520, 1610, 1620 четыре узла 1210, 1220, 1230, 1240 сцепления гарантированно устанавливаются в одинаковые (заранее заданные) положения при каждом полном отведении в нейтральное положение. Соответственно, при попытке введения во взаимодействие четырех узлов 1210, 1220, 1230, 1240 сцепления с новыми стеллажами 101г, 102г обеспечивается стабильное и надежное выдвижение этих узлов.
[158] В частности, когда первый узел 1210 сцепления и второй узел 1220 сцепления выдвигаются наружу, их поперечное перемещение ограничивается соответствующими направляющими пазами 1510, 1520. Например, благодаря зубцам в направляющих пазах 1510, 1520 соответствующие ролики выходят из направляющих пазов 1510, 1520 в заранее заданном положении (например, в центральной точке открытой части, как описано выше). Это положение позволяет гарантированно выравнивать первый узел 1210 сцепления и второй узел 1220 сцепления с соответствующими стеллажными элементами сцепления стеллажей 101г и 102г. Аналогичный механизм используется для выравнивания третьего узла 1230 сцепления и четвертого узла 1240 сцепления, при этом для четвертого направляющего паза 1620 зубец не требуется, поскольку соответствующий ролик при перемещении по нему может занимать только одно поперечное положение при каждом конкретном продольном положении.
[159] Описанные здесь направляющие пазы не являются обязательными. Таким образом, возможна платформенное транспортное средство без направляющих пазов 1510, 1520, 1610, 1620. Предполагается, что для регулирования положения четырех узлов 1210, 1220, 1230, 1240 сцепления могут использоваться и другие механизмы (например, двигатели, приводы и т.д.).
[160] Кроме того, продольные и поперечные направляющие платформенного транспортного средства 1000 также не являются обязательными. Предполагается, что для задания положения четырех узлов 1210, 1220, 1230, 1240 сцепления могут использоваться и другие механизмы (например, колеса, поворотный механизм и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Платформенное транспортное средство и способы управления платформенным транспортным средством | 2024 |
|
RU2839400C1 |
| Колесный узел для роботизированного транспортного средства и оснащенное им роботизированное транспортное средство. | 2023 |
|
RU2831446C1 |
| ПОДЪЕМНЫЙ УЗЕЛ, ОСНАЩЕННАЯ ИМ ПЛАТФОРМА И СКЛАДСКОЙ РОБОТ | 2024 |
|
RU2841430C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА, ОСНАЩЕННАЯ ПОЗИЦИОНЕРАМИ ПЛАТФОРМ, И РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ ПОЗИЦИОНЕРАМИ ПЛАТФОРМ | 2023 |
|
RU2831415C1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2263288C2 |
| ЗАКРЫВАЮЩИЕ СИСТЕМЫ БЛОКИРОВКИ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2015 |
|
RU2693364C2 |
| СКЛАДСКОЕ УСТРОЙСТВО И СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ | 2021 |
|
RU2806637C1 |
| Мультисервисная платформа интеллектуальных транспортных средств | 2023 |
|
RU2814325C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ОБРАБОТКИ КУЗОВОВ ТРАНСПОРТНЫХ СРЕДСТВ, В ЧАСТНОСТИ ЛЕГКОВЫХ АВТОМОБИЛЕЙ И ПРОИЗВОДСТВЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2293051C2 |
| Платформенные весы | 1984 |
|
SU1182272A1 |

Группа изобретений относится к платформенному транспортному средству для складской роботизированной системы и способу управления ею. Транспортное средство выполнено с возможностью вертикального перемещения вверх и вниз по двум складским стеллажам, расположенным с противоположных сторон платформы. Транспортное средство содержит: платформу, систему сцепления. Система сцепления выполнена с возможностью сцепляться с двумя складскими стеллажами. Система сцепления включает в себя: первый и второй узлы сцепления, первый и второй направляющие пазы. Узлы сцепления выполнены с возможностью выборочного взаимодействия со стеллажными элементами сцепления и перемещения между нейтральным и выдвинутым положением. Направляющие пазы выполнены с возможностью ограничивать перемещение узлов сцепления так, чтобы узлы сцепления при перемещении в свое нейтральное положение в продольном направлении, направлялись направляющими пазами в свое нейтральное положение в поперечном направлении. Достигается повышение способности транспортного средства правильно прикрепляться к складским стеллажам и должным образом перемещаться в вертикальном направлении. 2 н. и 14 з.п. ф-лы, 12 ил.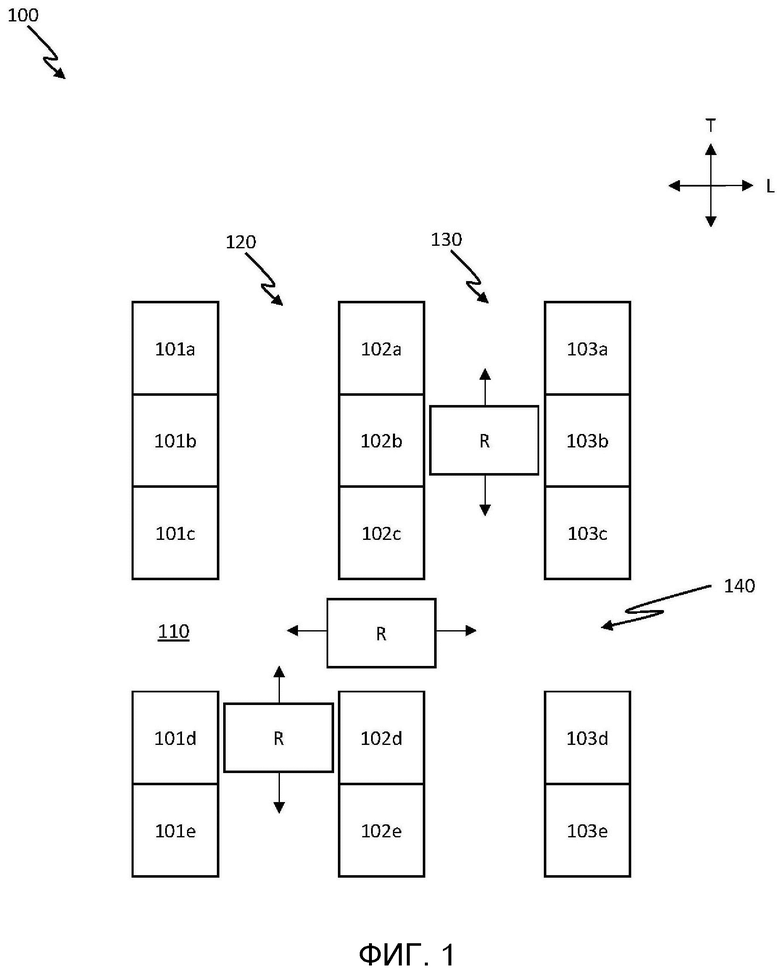
1. Платформенное транспортное средство для складской роботизированной системы, выполненное с возможностью вертикального перемещения по складским стеллажам и содержащее:
- платформу, имеющую центр, продольное направление и поперечное направление и выполненную с возможностью вертикально перемещаться вверх и вниз по двум складским стеллажам, расположенным с противоположных сторон платформы и разнесенным в продольном направлении; и
- систему сцепления, выполненную с возможностью сцепляться с двумя складскими стеллажами, включающую в себя:
- первый узел сцепления, выполненный с возможностью выборочно взаимодействовать с первым стеллажным элементом сцепления первого стеллажа из двух стеллажей и выполненный с возможностью перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением первого узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении;
- второй узел сцепления, выполненный с возможностью выборочно взаимодействовать со вторым стеллажным элементом сцепления второго стеллажа из двух стеллажей и выполненный с возможностью перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением второго узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении;
- первый направляющий паз, выполненный с возможностью ограничивать перемещение первого узла сцепления так, чтобы первый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся первым направляющим пазом в свое нейтральное положение в поперечном направлении; и
- второй направляющий паз, выполненный с возможностью ограничивать перемещение второго узла сцепления так, чтобы второй узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся вторым направляющим пазом в свое нейтральное положение в поперечном направлении.
2. Платформенное транспортное средство по п. 1, в котором нейтральное положение первого узла сцепления и нейтральное положение второго узла сцепления выровнены в поперечном направлении.
3. Платформенное транспортное средство по п. 1, в котором нейтральное положение первого узла сцепления и нейтральное положение второго узла сцепления смещены в продольном направлении в противоположные стороны относительно центра платформы на одинаковое расстояние.
4. Платформенное транспортное средство по п. 1, в котором первый направляющий паз и/или второй направляющий паз вблизи центра платформы сужены в поперечном направлении.
5. Платформенное транспортное средство по п. 1, в котором первый направляющий паз и/или второй направляющий паз имеют наибольшую поперечную ширину в продольном положении, наиболее удаленном от центра платформы.
6. Платформенное транспортное средство по п. 1, в котором первый направляющий паз и второй направляющий паз симметричны относительно оси симметрии, параллельной поперечному направлению и проходящей через центр платформы.
7. Платформенное транспортное средство по п. 1, в котором первый направляющий паз  второго направляющего паза в поперечном направлении, когда оба направляющих паза находятся в крайнем продольном положении.
второго направляющего паза в поперечном направлении, когда оба направляющих паза находятся в крайнем продольном положении.
8. Платформенное транспортное средство по п. 7, в котором первый направляющий паз выполнен таким образом, что первый узел сцепления в любом своем продольном положении может занимать единственное поперечное положение.
9. Платформенное транспортное средство по п. 1, в котором система сцепления содержит продольную направляющую, выполненную с возможностью направлять первый и второй узлы сцепления в продольном направлении платформы между нейтральным положением и максимально выдвинутым продольным положением, а первый направляющий паз и второй направляющий паз имеют наибольшую ширину в максимально выдвинутом продольном положении.
10. Платформенное транспортное средство по п. 1, в котором система сцепления содержит систему поперечных направляющих, выполненную с возможностью направлять первый и второй узлы сцепления в поперечном направлении платформы между нейтральным положением и максимально выдвинутым поперечным положением, первый направляющий паз и/или второй направляющий паз в продольном положении, наиболее удаленном от центра платформы, имеет такую поперечную ширину, чтобы первый направляющий паз и/или второй направляющий паз обеспечивал все возможные поперечные положения соответствующего узла сцепления.
11. Платформенное транспортное средство по п. 1, в котором система сцепления содержит:
- третий узел сцепления, выполненный с возможностью выборочно взаимодействовать с третьим стеллажным элементом сцепления первого стеллажа и выполненный с возможностью перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением третьего узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении;
- четвертый узел сцепления, выполненный с возможностью выборочно взаимодействовать с четвертым стеллажным элементом сцепления второго стеллажа и выполненный с возможностью перемещаться между нейтральным положением и по меньшей мере одним выдвинутым положением четвертого узла сцепления, смещенным относительно нейтрального положения как в продольном, так и в поперечном направлении;
- третий направляющий паз, выполненный с возможностью ограничивать перемещение третьего узла сцепления так, чтобы третий узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся третьим направляющим пазом в свое нейтральное положение в поперечном направлении; и
- четвертый направляющий паз, выполненный с возможностью ограничивать перемещение четвертого узла сцепления так, чтобы четвертый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся четвертым направляющим пазом в свое нейтральное положение в поперечном направлении.
12. Платформенное транспортное средство по п. 1, в котором первый направляющий паз и/или второй направляющий паз представляет собой канавку или щель, а первый узел сцепления и/или второй узел сцепления содержит выступ или ролик для взаимодействия с соответствующим направляющим пазом.
13. Платформенное транспортное средство по п. 1, в котором первый направляющий паз в поперечном направлении, чем второй направляющий паз, в крайнем продольном положении направляющих пазов, третий направляющий паз и четвертый направляющий паз симметричны относительно оси симметрии, параллельной поперечному направлению и проходящей через центр платформы, а второй направляющий паз и четвертый направляющий паз симметричны относительно оси симметрии, параллельной продольному направлению и проходящей через центр платформы.
14. Способ управления платформенным транспортным средством для складской роботизированной системы, выполненной с возможностью вертикально перемещаться по складским стеллажам и содержащей платформу, имеющую продольное и поперечное направления, предусматривающий:
- отведение в продольном направлении первого узла сцепления из выдвинутого положения в нейтральное положение с ограничением движения первого узла сцепления первым направляющим пазом таким образом, чтобы первый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся первым направляющим пазом в свое нейтральное положение в поперечном направлении; и
- отведение в продольном направлении второго узла сцепления из выдвинутого положения в нейтральное положение с ограничением движения второго узла сцепления вторым направляющим пазом таким образом, чтобы второй узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся вторым направляющим пазом в свое нейтральное положение в поперечном направлении.
15. Способ по п. 14, предусматривающий:
- выдвижение первого узла сцепления, после его отведения, из нейтрального положения во второе выдвинутое положение,
- отведение в продольном направлении первого узла сцепления, после его выдвижения, из второго выдвинутого положения в нейтральное положение с ограничением движения первого узла сцепления первым направляющим пазом таким образом, чтобы первый узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся первым направляющим пазом в свое нейтральное положение в поперечном направлении;
- выдвижение второго узла сцепления, после его отведения, из нейтрального положения в третье выдвинутое положение; и
- отведение в продольном направлении второго узла сцепления, после его выдвижения, из третьего выдвинутого положения в нейтральное положение с ограничением движения второго узла сцепления вторым направляющим пазом таким образом, чтобы второй узел сцепления при перемещении в свое нейтральное положение в продольном направлении направлялся вторым направляющим пазом в свое нейтральное положение в поперечном направлении.
16. Способ по п. 15, в котором выдвинутое положение первого узла сцепления отличается от второго выдвинутого положения первого узла сцепления, и/или выдвинутое положение второго узла сцепления отличается от третьего выдвинутого положения второго узла сцепления.
| Устройство для регулирования размера разгрузочной щели конусной дробилки | 1976 |
|
SU615946A1 |
| EP 0556595 B1, 27.03.1996 | |||
| US 7381022 B1, 03.06.2008 | |||
| CN 105460477 A, 06.04.2016 | |||
| Транспортная складская система | 2016 |
|
RU2643615C2 |

