Изобретение относится к технологиям обработки изображений и может быть использовано в системах технического зрения при решении задач предварительной обработки изображений для нахождения объектов вблизи границ обрабатываемых изображений.
Известен способ двумерной дискретной фильтрации объектов (Гонсалес Р., Вудс Р. Цифровая обработка изображений // М.: Техносфера, 2012. С. 999-1004), заключающийся в формировании обработанного изображения путем измерения его отсчетов при попиксельном обходе изображения окном, размеры и значения весовых коэффициентов которого совпадают с размерами и значениями интенсивностей яркости элементов заданного эталонного изображения, после чего в результате порогового преобразования, применяемого к элементам обработанного изображения, определяют области, содержащие объекты, схожие с эталоном.
Недостатком способа является низкая эффективность, обусловленная неопределенностью задания эталона, пороговых значений и слабой устойчивостью к аффинным и прочим трансформациям объектов на изображениях.
Известен способ двумерной дискретной фильтрации объектов (Обработка многомерных сигналов. В 2-х книгах. Кн. 1. Линейная многомерная дискретная обработка сигналов. Методы анализа и синтеза / Под ред. А.В. Богословского. М.: Радиотехника, 2013. С. 107-110), заключающийся в покадровом формировании видеосигнала изображения, измерении отсчетов функции автокорреляции и энергии каждого кадра, выборе эталона, измерении отсчетов его автокорреляционной функции, нормировании измеренных отсчетов изображения и эталона относительно измеренной энергии видеосигнала, синтезе двумерного дискретного фильтра, формировании обработанного изображения и осуществлении порогового обнаружения объекта.
Недостатком указанного способа является низкая эффективность, обусловленная пренебрежением влияния функции взаимной корреляции фона и эталона, а также размерами обнаруживаемого объекта.
Наиболее близким по технической сущности к заявляемому способу является способ двумерной дискретной фильтрации объектов заданного размера (Способ двумерной дискретной фильтрации объектов заданного размера / Пат. 2742871 Рос. Федерация: МПК51 G06K 9/36, G06K 9/40, G06K 9/56 / заявитель и патентообладатель М.А. Пантюхин, А.В. Богословский, И.В. Жигулина. №2020107754; заявл. 19.02.20; опубл. 11.02.21, Бюл. №5. 10 с.), заключающийся в покадровом формировании видеосигнала изображения, измерении отсчетов функции автокорреляции и энергии каждого кадра, выборе эталона, формировании окна эталона с размерами, превышающими размер эталона и объекта, измерении отсчетов автокорреляционной функции по сформированному окну, нормировании измеренных отсчетов изображения и окна эталона относительно измеренной энергии видеосигнала, синтезе двумерного дискретного фильтра, главный (наибольший) элемент которого находится в центре фильтра, формировании отсчетов обработанного изображения и осуществлении порогового обнаружения объекта.
Недостатком указанного способа является низкая вероятность обнаружения объектов на краях изображения, обусловленная пренебрежением влияния краевых отсчетов видеосигнала, совокупная ширина которых соответствует размерам синтезируемого фильтра.
Техническим результатом заявленного изобретения является повышение вероятности выделения объектов за счет синтеза двумерного дискретного фильтра, главный (наибольший) элемент которого располагают на произвольной позиции в окне фильтра.
Указанный технический результат достигается тем, что, как и в известном способе двумерной дискретной фильтрации объектов, осуществляют покадровое формирование видеосигнала изображения, измеряют отсчеты функции автокорреляции и энергию каждого кадра, выбирают эталон, формируют окно эталона с размерами, превышающими размеры эталона и обнаруживаемого объекта, измеряют отсчеты функции автокорреляции эталона по задаваемому окну эталона, задают апертуру фильтра равной (2m+1)×(2n+1), где m×n - линейные размеры обнаруживаемого объекта, нормируют полученные отсчеты функций автокорреляции изображения и окна эталона относительно измеренной энергии видеосигнала, синтезируют двумерный дискретный фильтр, главный (наибольший) элемент которого располагают не в центре окне фильтра, а в его произвольной позиции, далее при помощи синтезированного фильтра формируют обработанное изображение, изменяя порядок попиксельного обхода под конфигурацию фильтра, затем выполняют пороговое обнаружение объектов.
Сущность изобретения заключается в том, что на этапе синтеза двумерного дискретного фильтра его конфигурацию формируют не традиционным путем (с наибольшим центральным элементом), а так, что главный (наибольший) элемент фильтра располагают в произвольной позиции окна фильтра. Это, в свою очередь, для каждого синтезируемого фильтра меняет порядок попиксельного обхода изображения при его обработке. В отличие от способа-прототипа для разных конфигураций фильтров при определении их отсчетов используются разные комбинации отсчетов автокорреляционных функций изображения и эталона. Максимально возможное число конфигураций составляет (2m+1)(2n+1). Для поиска объектов, расположенных на краях изображения, необходимо не менее четырех фильтров с расположением главного (наибольшего) элемента в угловых позициях. Использование синтезированных таким образом фильтров позволяет учесть влияние краевых отсчетов видеосигнала при формировании обработанного изображения, а значит, исключается пропуск объектов, расположенных в граничных областях. Наряду с применением фильтра традиционной («центрированной») конфигурации это обеспечивает поиск объектов в любой части изображения.
Например, для случая обработки левой верхней границы изображения (с первого по m-й столбцы и с первой по n-ю строки) при задании фильтра главный (наибольший) элемент располагают в верхнем левом углу.
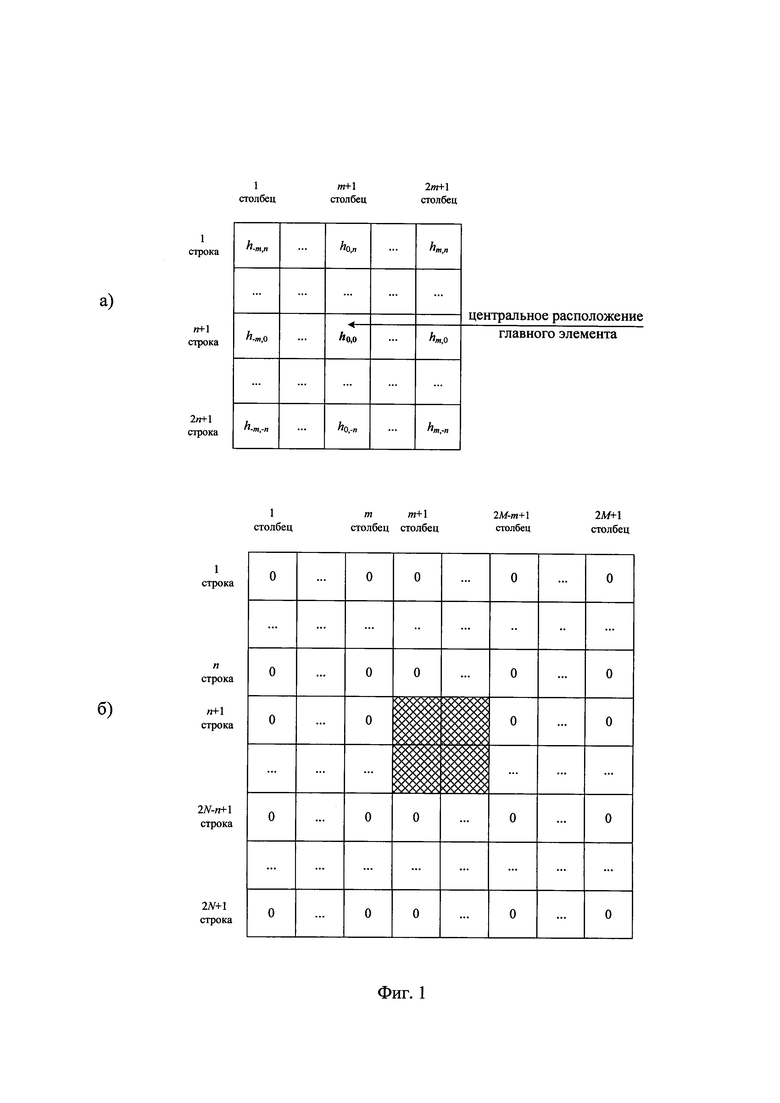
Сущность способа для рассматриваемого случая поясняется фиг. 1, 2. Так, в известном способе-прототипе при задании конфигурации фильтра главный элемент, отсчет h0,0, располагается в центре. Иллюстрация такого фильтра представлена на фиг. 1,а, где указаны рассчитываемые элементы hi,j фильтра для апертуры (2m+1)×(2n+1). При данном способе построения фильтра и последующем попиксельном обходе изображения с линейными размерами (2M+1)×(2N+1) столбцы обработанного изображения с номерами от 1 до m и от 2М-m до 2М+1, а также строки с номерами от 1 до n и от 2N-n до 2N+1 будут состоять из нулевых элементов, что не позволит обнаружить объекты, попадающие на них. Схематично результат обработки при такой конфигурации фильтра показан на фиг. 1,б, где заштрихованы значимые элементы.
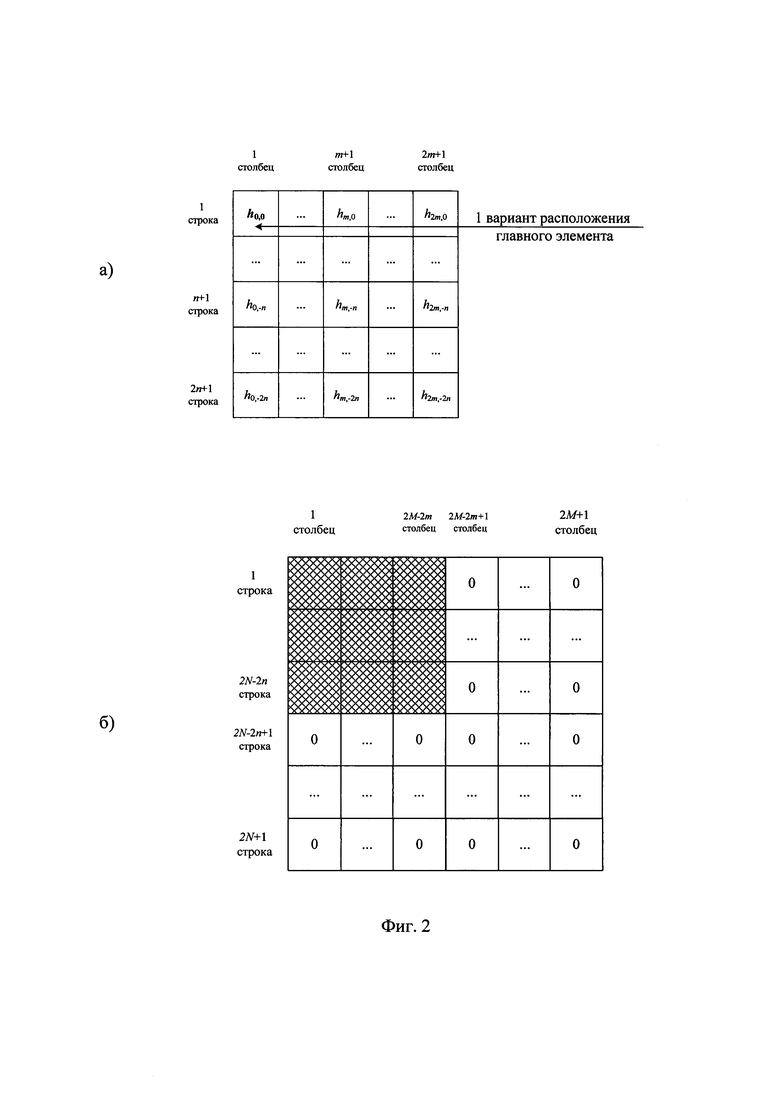
Для устранения этого эффекта в конфигурации фильтра изменяют расположение главного элемента, отсчета с индексами (0,0), так, как показано на фиг. 2,а - в верхнем левом углу апертуры. При такой конфигурации фильтра осуществим попиксельный обход изображения с 1 по 2М-2m строку и с 1 по 2N-2n столбец (заштрихованная область, показанная на фиг. 2,б).
Таким образом, в отличие от способа-прототипа вместо использования конфигурации фильтра с центральным расположением главного элемента используют конфигурацию фильтра с расположением главного элемента в другой позиции (верхний левый угловой элемент), что, в свою очередь, приводит к необходимости измерения дополнительных отсчетов автокорреляционной функции эталона и изображения, а также изменяет порядок попиксельного обхода изображения.
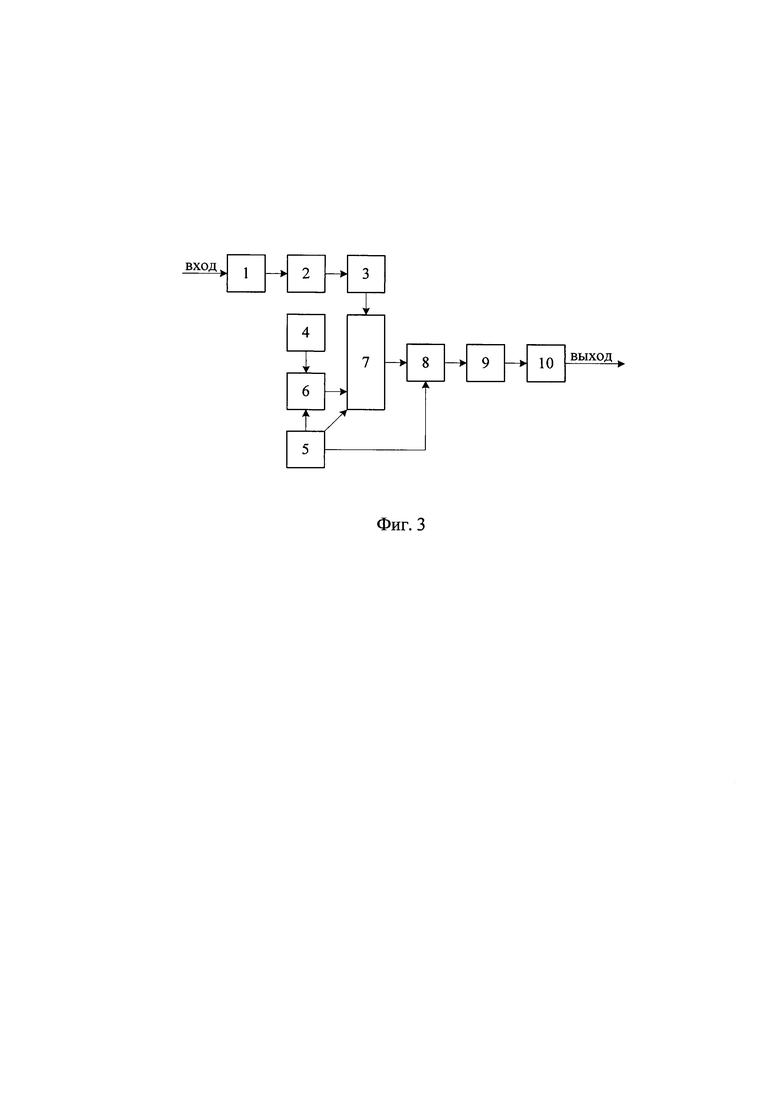
Способ может быть реализован, например, с помощью устройства (фиг. 3), включающего: блок 1 - телевизионную камеру, блок 2 - запоминающее устройство хранения кадра изображения, блок 3 - измеритель отсчетов функции автокорреляции изображения и его энергии, блок 4 - банк эталонов, блок 5 - конфигуратор фильтра, блок 6 - измеритель отсчетов функции автокорреляции эталона, блок 7 синтеза двумерного дискретного фильтра, блок 8 пространственной обработки изображения, блок 9 - пороговое устройство, блок 10 выдачи результатов обработки. Назначение блоков следует из их названия. В блоках могут быть использованы промышленно выпускаемые радиотехнические элементы и устройства.
Работа устройства осуществляется следующим образом.
Изображение реальной сцены формируется в блоке 1 и поступает в блок 2, затем в блоке 3 осуществляется измерение отсчетов его функции автокорреляции и энергии. В блоке 4 хранится множество эталонов обнаруживаемых объектов, в блоке 5 хранятся конфигурации фильтра, на основе данных из этих двух блоков в блоке 6 осуществляется измерение требуемых отсчетов автокорреляционной функции эталона. Далее в блоке 7 осуществляется синтез двумерного дискретного фильтра, после чего в блоке 8 производится пространственная обработка изображения, а затем в блоке 9 выполняется пороговое преобразование обработанного изображения. После этого результат обработки изображения передается в блок 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДВУМЕРНОЙ ДИСКРЕТНОЙ ФИЛЬТРАЦИИ ОБЪЕКТОВ ЗАДАННОГО РАЗМЕРА | 2020 |
|
RU2742871C1 |
| СПОСОБ ДВУМЕРНОЙ ИЕРАРХИЧЕСКОЙ ДИСКРЕТНОЙ ФИЛЬТРАЦИИ ОБЪЕКТОВ | 2024 |
|
RU2840469C1 |
| Способ идентификации загрязнений морской поверхности | 2015 |
|
RU2664255C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТИ ЗЕМЛЕТРЯСЕНИЯ | 2001 |
|
RU2183844C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2702423C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЗМОВ | 2019 |
|
RU2697852C1 |
| СПОСОБ ДЕКОДИРОВАНИЯ ВИДЕОСИГНАЛА | 2012 |
|
RU2646308C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЗМОВ | 2013 |
|
RU2531474C1 |
| СПОСОБ ПОИСКА ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2019 |
|
RU2718172C1 |
| СПОСОБ КОНТРОЛЯ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ИЗДЕЛИЯ | 2009 |
|
RU2413179C2 |
Изобретение относится к способу двумерной дискретной фильтрации объектов. Техническим результатом изобретения является повышение точности выделения обнаруживаемых объектов на границах изображения. Способ содержит этапы, на которых выполняют: покадровое формирование видеосигнала изображения, измерение отсчетов автокорреляционной функции и энергии каждого кадра, выбор эталона, формирование окна эталона, превышающего размеры эталона и обнаруживаемого объекта, измерение отсчетов автокорреляционной функции окна эталона, нормирование отсчетов видеосигнала изображения и окна эталона относительно измеренной энергии видеосигнала, синтез двумерного дискретного фильтра и пороговое обнаружение объекта синтезированным фильтром, при этом в способе при синтезе двумерного дискретного фильтра его конфигурацию формируют не только с наибольшим элементом в центре, а располагают наибольший элемент фильтра в любой другой позиции, используя при определении отсчетов каждого фильтра разные комбинации отсчетов автокорреляционных функций и разный порядок попиксельного обхода изображения при его обработке, максимально возможное количество фильтров равно (2m+1)(2n+1), где m×n - линейные размеры обнаруживаемого объекта, минимальное количество фильтров, необходимых для обнаружения объекта на краях изображения, равно четырем с расположением наибольшего элемента в угловых позициях апертуры. 5 ил.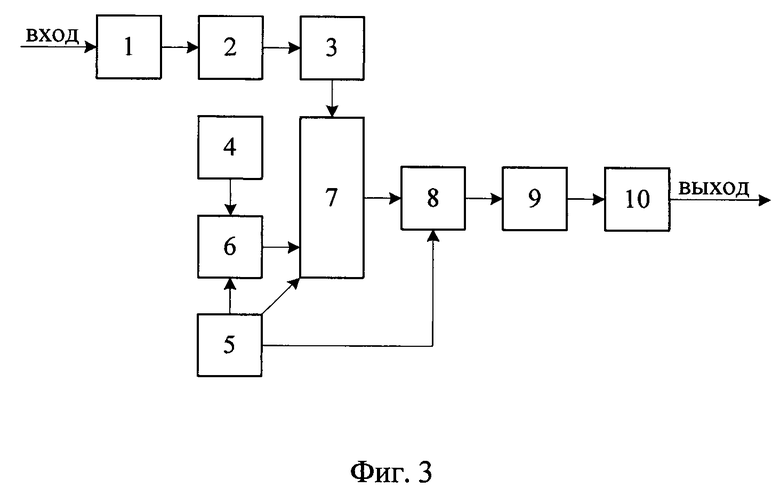
Способ двумерной дискретной фильтрации объектов, включающий: покадровое формирование видеосигнала изображения, измерение отсчетов автокорреляционной функции и энергии каждого кадра, выбор эталона, формирование окна эталона, превышающего размеры эталона и обнаруживаемого объекта, измерение отсчетов автокорреляционной функции окна эталона, нормирование отсчетов видеосигнала изображения и окна эталона относительно измеренной энергии видеосигнала, синтез двумерного дискретного фильтра и пороговое обнаружение объекта синтезированным фильтром, отличающийся тем, что при синтезе двумерного дискретного фильтра его конфигурацию формируют не только с наибольшим элементом в центре, а располагают наибольший элемент фильтра в любой другой позиции, используя при определении отсчетов каждого фильтра разные комбинации отсчетов автокорреляционных функций и разный порядок попиксельного обхода изображения при его обработке, максимально возможное количество фильтров равно (2m+1)(2n+1), где m×n - линейные размеры обнаруживаемого объекта, минимальное количество фильтров, необходимых для обнаружения объекта на краях изображения, равно четырем с расположением наибольшего элемента в угловых позициях апертуры.
| СПОСОБ ДВУМЕРНОЙ ДИСКРЕТНОЙ ФИЛЬТРАЦИИ ОБЪЕКТОВ ЗАДАННОГО РАЗМЕРА | 2020 |
|
RU2742871C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭНЕРГЕТИЧЕСКОГО СПЕКТРА ДВУМЕРНОГО СИГНАЛА | 2008 |
|
RU2370780C1 |
| СПОСОБ ФИЛЬТРАЦИИ БИНАРНОГО ИЗОБРАЖЕНИЯ | 2017 |
|
RU2662630C1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2015 |
|
RU2589301C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
