Изобретение относится к технологиям обработки изображений и может быть использовано в системах технического зрения при решении задач предварительной обработки изображений для нахождения на них объектов заданного размера.
Известен, способ двумерной дискретной фильтрации объектов (Гонсалес Р., Вудс Р. Цифровая обработка изображений // М.: Техносфера, 2012. С. 999-1004), заключающийся в попиксельном обходе изображения окном, размеры и значения весовых коэффициентов которого совпадают с размерами и значениями интенсивностей яркости элементов заданного эталонного изображения, после чего в результате порогового преобразования, применяемого к элементам обработанного изображения, определяют области, содержащие объекты, схожие с эталоном.
Недостатком способ является низкая вероятность эффективности, обусловленная неопределенностью задания эталона, пороговых значений и слабой устойчивостью к аффинным и прочим трансформациям объектов на изображениях.
Также известен собой способ двумерной дискретной фильтрации объектов, основанный на помехоустойчивом градиентного выделения контуров объектов на цифровых изображениях (Патент RU 2589301 С1 МПК51 G06K 9/36, G06K 9/40, G06K 9/56, опубл. 10.07.16, бюл. №19), заключающийся в том, что на изображении предварительно осуществляют операцию оценивания положения помех, после чего для каждого элемента изображения формируют четыре разноориентированные маски Превитта, значения коэффициентов которых изменяют в зависимости от наличия и положения помех, а при наличии помех одновременно в трех элементах любой из полумасок (входящих в состав разноориентированных масок), размер полумаски увеличивают на число непораженных помехами окаймляющих элементов, весовым коэффициентам новых элементов маски присваивают значения, сумма которых по модулю равна сумме значений по модулю второй полумаски. После этого с использованием данных масок вычисляют приближенное значение модуля градиента изображения, и путем его порогового преобразования получают контуры объектов на изображении. Далее путем прослеживания контуров получают связанные области, в которых определяют объекты интереса.
Недостатком способа является низкая вероятность эффективности, обусловленная наличием ошибок на этапе оценивания положения импульсных помех и неопределенностью задания используемых пороговых параметров, особенно в случаях отсутствия на изображении помех данного вида.
Наиболее близким по технической сущности к заявляемому способу является способ двумерной дискретной фильтрации объектов (Обработка многомерных сигналов. В 2-х книгах. Кн.1. Линейная многомерная дискретная обработка сигналов. Методы анализа и синтеза / Под ред. А.В. Богословского. М.: Радиотехника, 2013. С. 107-110), заключающийся в покадровом формировании видеосигнала изображения, измерении отсчетов функции автокорреляции и энергии каждого кадра изображения, выборе эталона, измерении отсчетов его функции автокорреляции, нормировании измеренных отсчетов изображения и эталона относительно измеренной энергии видеосигнала, синтезе двумерного дискретного фильтра (ДДФ) и осуществлении порогового обнаружения объекта.
Недостатком указанного способа является низкая вероятность эффективности, обусловленная пренебрежением влияния функции взаимной корреляции фона и эталона и размерами обнаруживаемого объекта.
Техническим результатом заявленного изобретения является повышение вероятности выделения обнаруживаемых объектов за счет учета функции взаимной корреляции эталона и фона, а также учета размеров обнаруживаемого объекта.
Указанный технический результат достигается тем, что, как и известном способе двумерной дискретной фильтрации объектов, осуществляют покадровое формирование видеосигнала изображения, измерение отсчетов функции автокорреляции и энергии каждого кадра изображения, выбор эталона, формирование окно эталона с размерами, превышающими размеры эталона и обнаруживаемого объекта, измерение отсчетов функции автокорреляции эталона осуществляют по задаваемому окну эталона, апертуру фильтра выбирают в диапазоне от (m+1)×(n+1) до (2m+1)×(2n+1), где m×n - линейные размеры обнаруживаемого объекта, нормирование полученных отсчетов функций автокорреляции изображения и эталона относительно измеренной энергии видеосигнала, синтез ДДФ, пороговое обнаружение объекта синтезированным фильтром.
Сущность изобретения заключается в том, что при выборе эталона вместо измерения отсчетов его функции автокорреляции, формируют окно эталона с размерами, превышающими размеры эталона и обнаруживаемого объекта, измеряют отсчеты функции автокорреляции эталона по задаваемому окну эталона, а апертуру фильтра выбирают в диапазоне от (m+1)×(n+1) до (2m+1)×(2n+1).
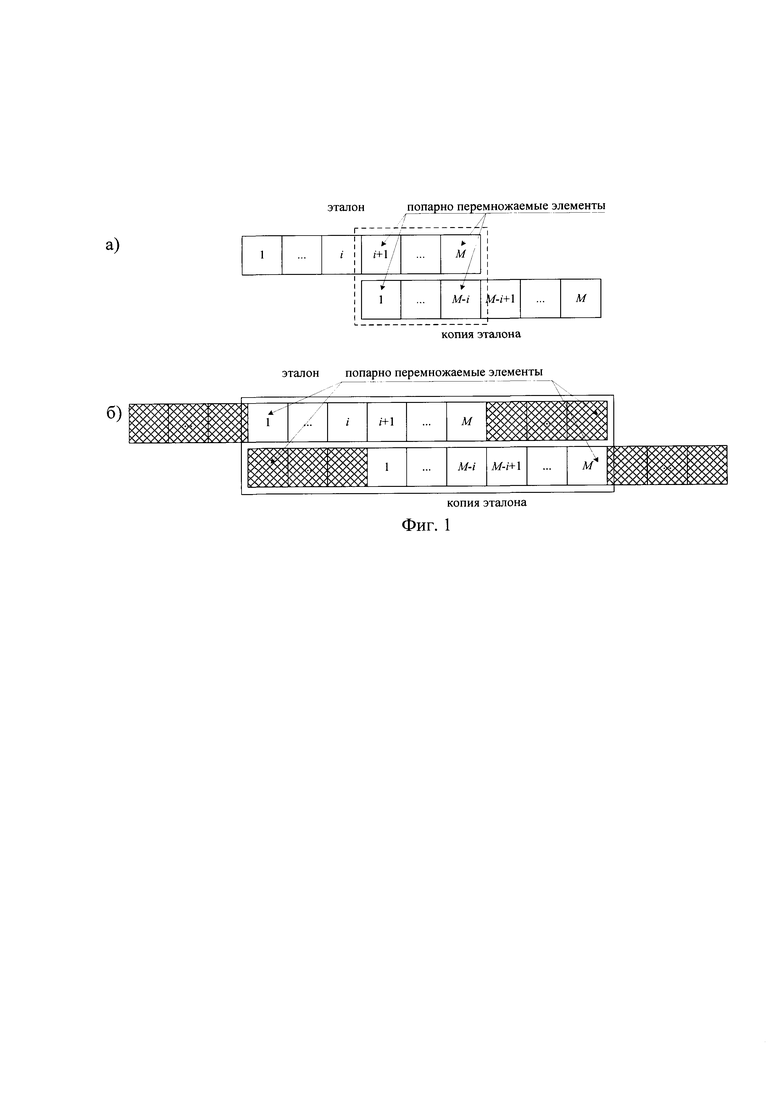
Сущность способа поясняется фиг. 1, 2 на примере формирования одномерного окна эталона. Так в известном способе-прототипе при измерении отсчетов автокорреляции эталона осуществляют суммирование попарных произведений отсчетов эталона, получаемых при взаимном смещении эталона и его копии. Иллюстрация такого смещения путем сдвига эталона и его копии на i элементов для расчета одного из отчетов функции автокорреляции эталона представлена на фиг. 1,а, на которой цифрами обозначены элементы одномерного эталона длины М и его копии. Отсчеты фона при этом считаются нулевыми. Это приводит к тому, что элементам эталона с номерами от 1 до i и от M-i+1 до М не ставятся в соответствие элементы копии эталона для перемножения, а, следовательно, в результате синтеза ДДФ будут уменьшены отсчеты его импульсной характеристики. В итоге, сигнал на выходе фильтра будет относительно мал.
Для устранения этого изображение эталона дополняют фоном, уровень которого выбирают, например, средним по динамическому диапазону. Таким образом, формируют окно эталона. На фиг. 1,б заштрихованными показаны добавленные фоновые элементы по одному с каждой стороны.
Поэтому в отличие от способа-прототипа вместо измерения отсчетов функции автокорреляции эталона формируют окно эталона и измеряют отсчеты функции автокорреляции окна с размерами, достаточными для того, чтобы при измерении каждого такого отсчета задействовать все необходимые отсчеты эталона.
Вместе с тем, чтобы сигнал, обработанный фильтром имел наибольшую возможную величину при допустимых искажениях выбирают апертуру фильтра в диапазоне от (m+1)×(n+1) до (2m+1)×(2n+1). Так на фиг. 2 изображены характерные виды видеосигнала строки изображения, обработанных ДДФ при различных апертурах. На фиг. 2 по оси абсцисс отложен номер j элемента строки обработанного изображения, а по оси ординат отложено значение сигнала U видеосигнала строки. На фиг. 2,а представлен вид видеосигнала, характерный для апертур между (m+1)×(n+1) и (2m+1)×(2n+1), на фиг. 2,в - вид видеосигнала, характерный для апертуры (2m+1)×(2n+1), на фиг. 2,в - вид видеосигнала, характерный при апертурах, превышающих (2m+1)×(2n+1).
Видно, что при увеличении апертуры сверх значений (2m+1)×(2n+1) существенного изменения величины сигнала, достаточного для улучшения его выделения, не происходит. Кроме того, при этом увеличивается влияние отрицательных артефактов, отмеченных на фиг. 2 пунктирными прямоугольниками.
Поэтому апертуру ДДФ выбирают из промежутка от (m+1)×(n+1) до (2m+1)×(2n+1) и формируют окно эталона, максимальные размеры которого равны (2m+mэ)×(2n+nэ), где mэ×nэ - размеры эталона.
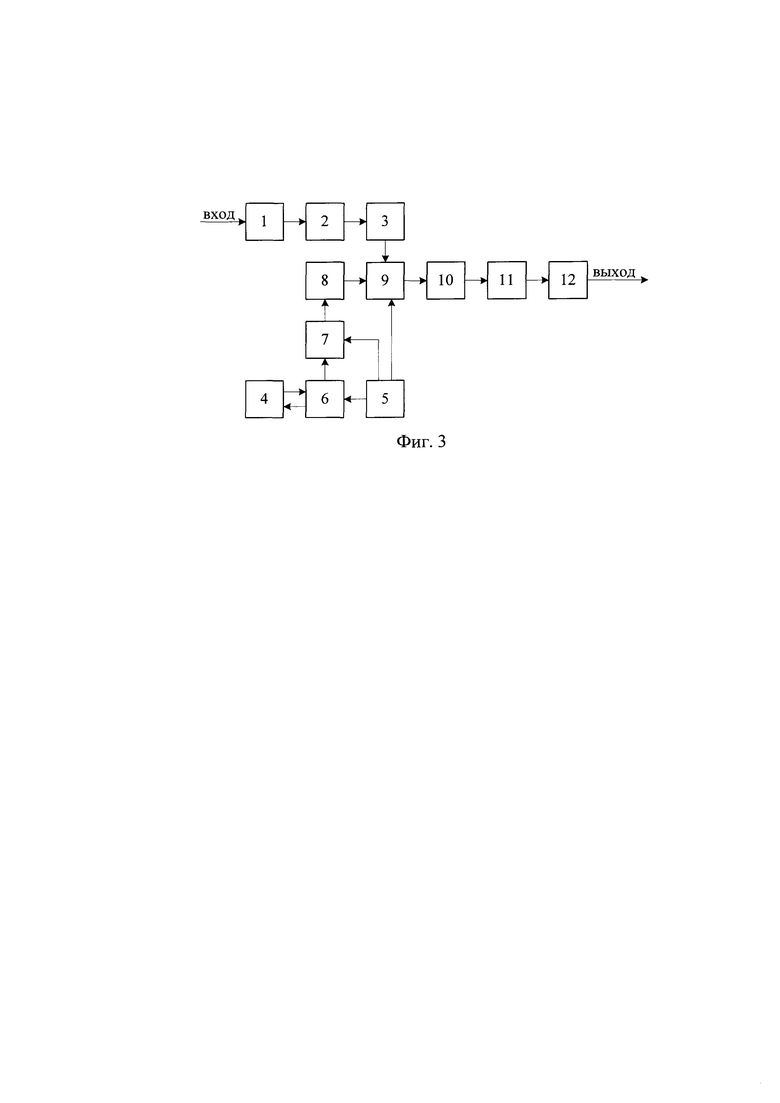
Способ может быть реализован, например, с помощью устройства (фиг. 3), включающего блок 1 - телевизионную камеру, блок 2 - запоминающее устройство хранения кадра изображения, блок 3 - измеритель отсчетов автокорреляции кадра изображения и его энергии, блок 4 - банк эталонов, блок 5 задания типа и размеров обнаруживаемого объекта, блок 6 выбора эталона, блок 7 - блок формирования окна эталона, блок 8 - измеритель отсчетов автокорреляции окна эталона, блок 9 синтеза ДДФ, блок 10 пространственной обработки изображения, блок 11 - пороговое устройство, блок 12 выдачи результатов обработки. Назначение блоков следует из их названия.
Работа устройства осуществляется следующим образом.
Изображение реальной сцены формируется в блоке 1, после чего поступает в блок 2, затем в блоке 3 осуществляется измерение его отсчетов автокорреляции и энергии, в блоке 4 хранится множество эталонов обнаруживаемых объектов, в блоке 5 задается тип и размер обнаруживаемого объекта, на основе которых блок 6 выбирает изображение-эталон из блока 4, а блоке 7, который может быть реализован на основе стандартных логических микросхем и запоминающих устройств, также с учетом размеров обнаруживаемого объекта осуществляется формирование окна эталона, после чего в блоке 8 осуществляется расчет отсчетов автокорреляции окна эталона. Далее в блоке 9 осуществляется синтеза ДДФ, после чего в блоке 10 происходит его пространственная обработка, затем пороговое преобразование обработанного изображения в блоке 11. После этого результат обработки изображения передается в блок 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДВУМЕРНОЙ ДИСКРЕТНОЙ ФИЛЬТРАЦИИ ОБЪЕКТОВ | 2023 |
|
RU2806653C1 |
| СПОСОБ ДВУМЕРНОЙ ИЕРАРХИЧЕСКОЙ ДИСКРЕТНОЙ ФИЛЬТРАЦИИ ОБЪЕКТОВ | 2024 |
|
RU2840469C1 |
| СПОСОБ ПОИСКА ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2019 |
|
RU2718172C1 |
| СПОСОБ ПОИСКА И РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2011 |
|
RU2458397C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ И ОПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 1973 |
|
SU368626A1 |
| УСТРОЙСТВО ПРЕДОБРАБОТКИ КАРТЫ ГЛУБИНЫ СТЕРЕОИЗОБРАЖЕНИЯ | 2013 |
|
RU2535183C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| Способ построения панорамного радиолокационного изображения объекта | 2016 |
|
RU2629372C1 |

Изобретение относится к области информационных технологий, а именно к технологиям обработки изображений. Техническим результатом заявленного изобретения является повышение вероятности выделения обнаруживаемых объектов. Способ двумерной дискретной фильтрации объектов, включающий покадровое формирование видеосигнала изображения, измерение отсчетов функции автокорреляции и энергии каждого кадра изображения, выбор эталона, измерение отсчетов его функции автокорреляции, нормирование измеренных отсчетов изображения и эталона относительно измеренной энергии видеосигнала, при задании эталона формируют его окно с размерами, превышающими размеры эталона и обнаруживаемого объекта, отсчеты функции автокорреляции эталона измеряют по заданному окну эталона, а апертуру фильтра выбирают в диапазоне от (m+1)×(n+1) до (2m+1)×(2n+1), где m×n - линейные размеры обнаруживаемого объекта. 3 ил.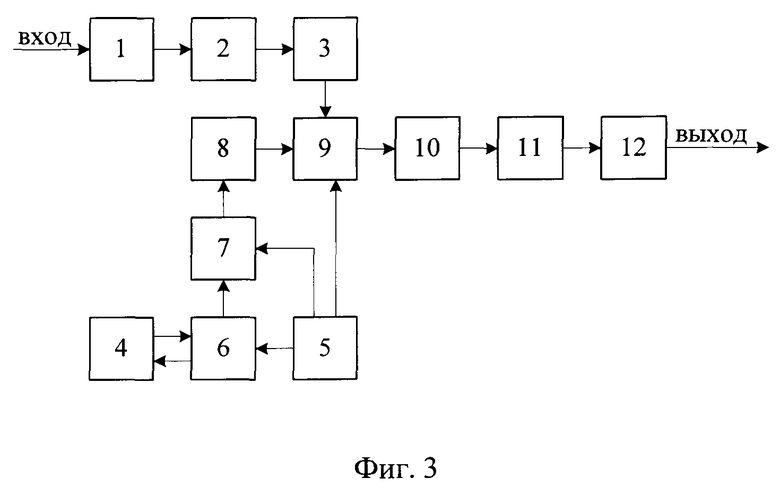
Способ двумерной дискретной фильтрации объектов, включающий покадровое формирование видеосигнала изображения, измерение отсчетов функции автокорреляции и энергии каждого кадра изображения, выбор эталона, измерение отсчетов его функции автокорреляции, нормирование измеренных отсчетов изображения и эталона относительно измеренной энергии видеосигнала, с использованием полученных результатов синтезируют двумерный дискретный фильтр и осуществляют пороговое обнаружение объекта синтезированным фильтром, отличающийся тем, что при задании эталона формируют его окно с размерами, превышающими размеры эталона и обнаруживаемого объекта, отсчеты функции автокорреляции эталона измеряют по заданному окну эталона, а апертуру фильтра выбирают в диапазоне от (m+1)×(n+1) до (2m+1)×(2n+1), где m×n - линейные размеры обнаруживаемого объекта.
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2015 |
|
RU2589301C1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2009 |
|
RU2403616C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБРАБОТКИ ДАННЫХ ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ПРОЦЕССОРА СИГНАЛА ИЗОБРАЖЕНИЯ, ИМЕЮЩЕГО ЛОГИКУ ОКОНЧАТЕЛЬНОЙ ОБРАБОТКИ | 2011 |
|
RU2542928C2 |
| ОБРАБОТКА МЕЖУРОВНЕВОГО ЭТАЛОННОГО ИЗОБРАЖЕНИЯ ДЛЯ МАСШТАБИРУЕМОСТИ СТАНДАРТОВ КОДИРОВАНИЯ | 2013 |
|
RU2595966C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

