Изобретение относится к области цифровой обработки изображений и может быть использовано в фото, видео, оптико-локационной и оптико-электронной технике при решении задач распознавания образов по их контурам на регистрируемых цифровых изображениях.
В настоящее время известны несколько способов выделения контуров объектов с целью их последующего распознавания на цифровых полутоновых изображениях [1-3].
Большинство способов обработки изображений для выделения контуров основаны на вычислении модуля градиента на всей площади цифрового изображения по приближениям первой производной - локальными конечными разностями [1-3]. При этом приближенные компоненты градиента вычисляют с использованием скользящего окна (маски), перемещающегося по всему изображению и имеющему размеры, как правило, 3×3 пикселя. Пиксели изображения, попадающие в данную маску, подвергают вначале перемножению с соответствующими коэффициентами маски, а затем суммируют [1-3]. Коэффициенты маски подбирают таким образом, чтобы выходной сигнал оператора обработки реагировал (давал максимум) на перепады яркости изображения и не реагировал на монотонные участки (имел нуль). В настоящее время известно [1-3] несколько типов масок: Робертса, Превитта, Собела, Кирша и др. При этом каждый тип маски характеризуется своими особенностями. Так, например, маска Робертса позволяет обрабатывать изображение с высокой скоростью, маска Собела позволяет придать больший вес центральным конечным разностям [1]. Недостатками градиентных способов выделения контуров изображений [1-3] является достаточно сильная их чувствительность к помехам, относящимся к классу импульсных [4-6], возникающих вследствие многих явлений при цифровом преобразовании и передаче изображений (пораженные пиксели).
К другим способам выделения контуров объектов на изображениях относятся процедуры, которые включают несколько этапов выделения контура. Так, детектор Канни [7] включает несколько вычислительных процедур, в том числе предварительную низкочастотную фильтрацию, прослеживание контуров и подавление не максимальных локальных значений компонент градиента; детектор Дериче [8] включает работу рекурсивных фильтров для сглаживания изображения. Однако эти процедуры также используют градиентные маски (Робертса, Превитта, Собела, Кирша) на каком-либо этапе обработки изображения.
Также существуют способы выделения контуров объектов на изображениях, более далекие от заявляемого, основанные на представлении изображения в виде марковского случайного поля [9] и методах теории графов [10], которые сопровождаются значительными вычислительными затратами и также являются чувствительными к импульсным помехам.
Устойчивым к воздействию импульсных помех является способ градиентного выделения контуров объектов на цифровых изображениях [11], но его чувствительность к полезным яркостным перепадам снижается с ростом числа элементов изображения, пораженных импульсными помехами.
Наиболее близким по технической сущности к заявляемому способу является способ помехоустойчивого градиентного выделения контуров объектов на цифровых изображениях [12] с использованием маски Превитта размером 3×3 пикселя. Рассмотрим данный способ.
Цифровое полутоновое изображение, регистрируемое оптико-электронными сенсорами, является дискретным по пространству и квантованным по уровню, поэтому описывается выражением [1, 2]:
где A - матрица полутонового изображения;
a i,j - элементы матрицы изображения;
i - номер строки матрицы;
j - номер столбца;
m - число строк матрицы;
n - число ее столбцов.
Элементы a
i,j (1) могут принимать квантованные значения, соответствующие их яркости, на интервале  , где N - степень квантования изображений. Как правило, для полутоновых изображений используется 8-битное квантование, т.е. 256 градаций яркости (N=8). Примем, что a
i,j=0 соответствует абсолютно черному цвету на изображении, a
, где N - степень квантования изображений. Как правило, для полутоновых изображений используется 8-битное квантование, т.е. 256 градаций яркости (N=8). Примем, что a
i,j=0 соответствует абсолютно черному цвету на изображении, a 
Согласно способу-прототипу [12], матрицу исходного изображения А предварительно оценивают на наличие и положение импульсных помех. В результате процедуры обнаружения, которая может быть осуществлена любым из известных способов [13, 14], получают бинарную матрицу 

 , то это указывает на то, что в данной координате i,j на матрице А пиксель является полезным сигналом яркости (не пораженным), а в случае, когда некоторый элемент
, то это указывает на то, что в данной координате i,j на матрице А пиксель является полезным сигналом яркости (не пораженным), а в случае, когда некоторый элемент
 , то это говорит о том, что в данной координате i,j на матрице А пиксель является пораженным, т.е. представляет собой импульсную помеху.
, то это говорит о том, что в данной координате i,j на матрице А пиксель является пораженным, т.е. представляет собой импульсную помеху.
На втором этапе согласно способу-прототипу [12] вычисляют четыре матрицы: G1, G2, G3 и G4, имеющие тот же размер, что и A (m×n), элементы которых представляют собой соответственно вертикальные, горизонтальные и две диагональные составляющие компонент градиента. Элементы данных матриц находят на основе четырех разноориентированных масок Превитта W1, W2, W3 и W4 размера 3×3 для каждого элемента изображения A. Весовые коэффициенты (веса) масок W1, W2, W3 и W4 в свою очередь изменяют на основе пар управляющих векторов для каждой маски.
Рассмотрим процедуру изменения значений весовых коэффициентов маски W1 [12]. Управляющие векторы V11 и V12 для маски W1 формируют на основе матрицы


Элементы V11 и V12 принимают переменные бинарные значения: 0 - если в данном элементе матрицы
В случае, если оба вектора V11 и V12 одновременно принимают только нулевые элементы  и
и  , то маска W1 принимает классический вариант горизонтальной маски Превитта:
, то маска W1 принимает классический вариант горизонтальной маски Превитта:
При этом в ней выделяют две составляющих ее - верхнюю и нижнюю строки  и
и  , называемых отрицательной и положительной полумасками соответственно [12].
, называемых отрицательной и положительной полумасками соответственно [12].
Если же среди элементов векторов V11 и V12 есть отличные от нуля (единичные) компоненты, то весовые коэффициенты полумасок W11 и W12 изменяют следующим образом [12]:
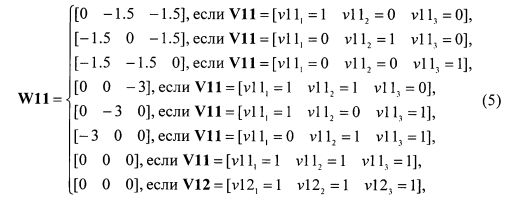
Таким образом, осуществляют изменение значений полумасок W11 и W12 в зависимости от положения импульсных помех в элементах изображения. Далее формируют результирующую маску W1 из коэффициентов полумасок W11 и W12, которые будут задавать первую и последнюю ее строки, а второй будет строка, содержащая нулевые элементы [12].
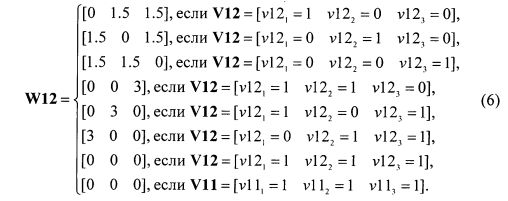
Аналогичным образом формируют управляющие векторы и на их основе полумаски для вертикальной, главно-диагональной и побочно-диагональной масок W2, W3 и W4 [12]:


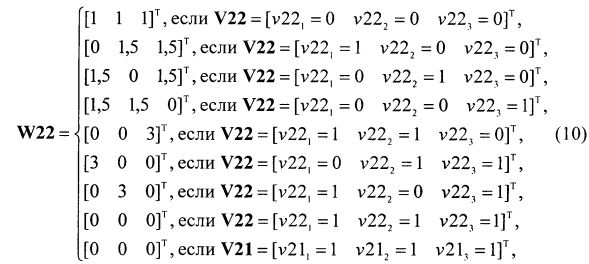
где символ Т обозначает операцию транспонирования.
Далее формируют результирующую маску W2 из полумасок W21 и W22, которыми заполняют первый и последний ее столбцы, а второй столбец заполняют нулевыми элементами [12].
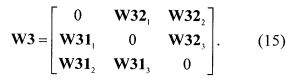
Для главно-диагональной маски W3 полумаски W31 и W32 будут представлять собой матрицы (без одного элемента) на основе управляющих векторов [12]:


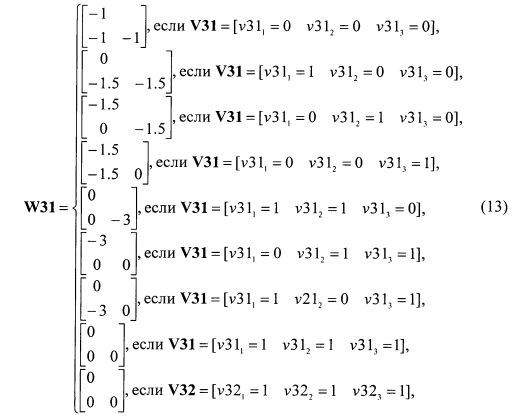

Далее формируют результирующую маску W3 из значений полумасок W31 и W32 следующим образом [12]:
Для побочно-диагональной маски W4 управляющие векторы V41 и V42 и матрицы-полумаски W41 и W42 принимают соответственно вид [12]:



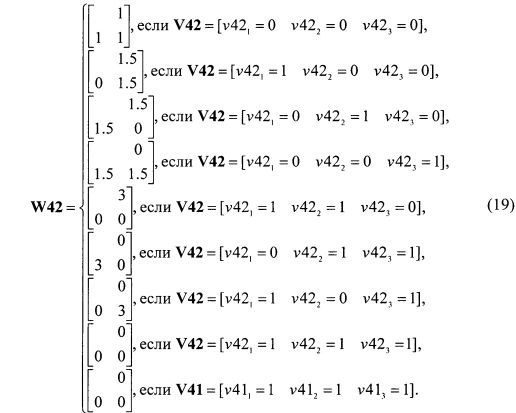
Далее формируют результирующую маску W4 из значений полумасок W41 и W42 следующим образом:
Далее с использованием полученных масок вычисляют составляющие компонент градиента G1, G2, G3 и G4 [1, 2] в элементе с координатами i,j:


Далее вычисляют матрицу ∇G, элементы которой равны единице в случае, если модуль градиента превышает порог (означает, что элемент матрицы A с координатами i,j представляют собой пиксели, принадлежащие контурам), и нулю в противном случае (указывающие на отсутствие элемента контура) [1, 2]:

где P - величина порога, устанавливаемая экспериментальным путем, как правило, на уровне 0.5…1.52N для полутоновых изображений со степенью квантования N.
На последнем этапе, в целях визуализации результата выделения контура, осуществляют выделение на абсолютно белой матрице абсолютно черных точек, с координатами, в которых элементы ∇gi,j (25) равны единице:
где bi,j - элементы матрицы B, являющейся матрицей визуального отображения результата выделения контура.
Таким образом, в способе-прототипе [12] на основе матрицы регистрируемого изображения А с использованием совокупности операций (2)-(26) получают матрицу В, содержащую контуры объектов и другие перепады яркости.
Необходимо отметить, что в случаях, когда обработке подвергают первые и/или последние элементы строк и/или столбцов, маска оператора выходит за пределы матрицы изображения (краевой эффект) [1-3]. Из техники цифровой обработки изображений известно несколько способов преодоления данного эффекта [1-3, 4-6], к которым относится уменьшение числа элементов маски, выходящих за пределы изображения, добавление дополнительных строк и столбцов матрицы изображения (i=-1, m+1, y=-1, n+1) и т.д.
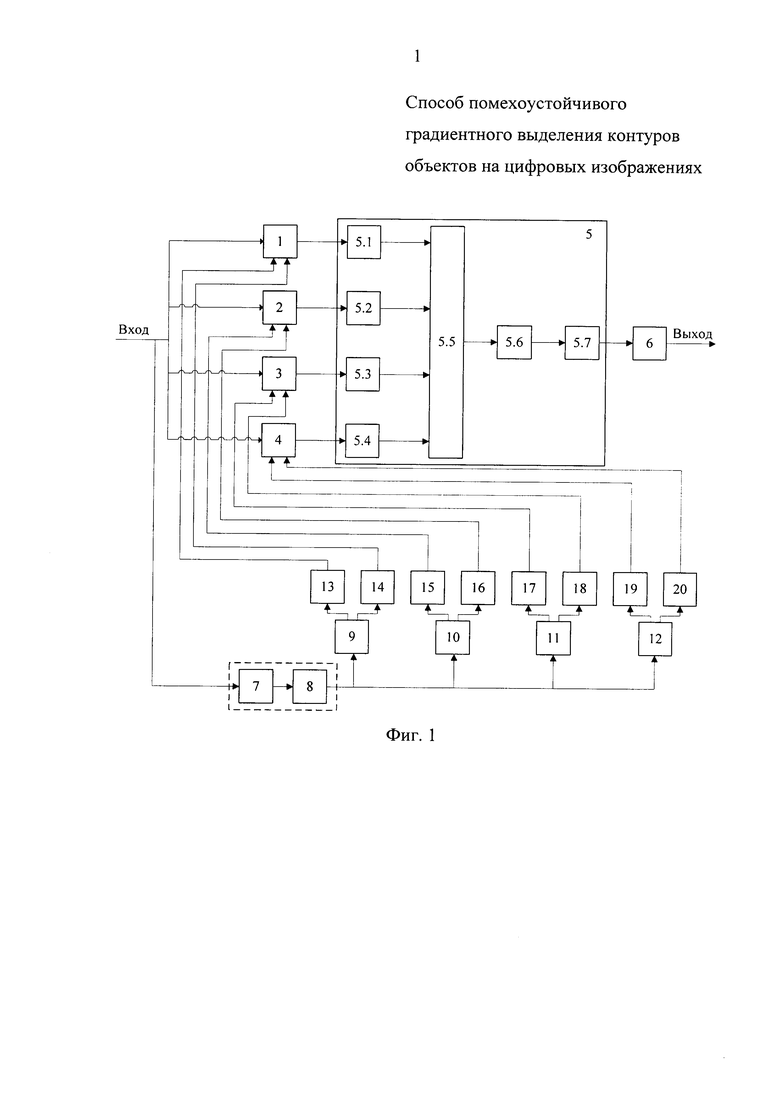
Рассмотренный способ-прототип (2)-(26) является менее чувствительным к импульсным помехам в отличие от известных градиентных способов [1, 2]. Структурная схема устройства обработки цифровых изображений, функционирующего по способу-прототипу, представлена на фиг. 1.
Между тем рассмотренный способ-прототип имеет недостаток, заключающийся в следующем. Пусть вычисляют компонент градиента с помощью полумасок W11 и W12 в точке i,j изображения A (т.е. в точке a
i,j). Предположим, что фрагмент матрицы оценки помех
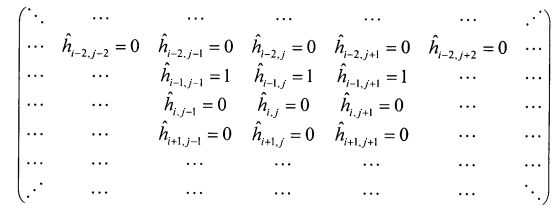 , что
, что
говорит о том, что помехой поражены три элемента: a i-1,j-1, a i-1,j и a i-1,j+1, т.к. hi-1,j-1=1, hi-1,j=1 и hi-1,j+1=1, расположенные над центром маски W1 (центр маски w1i,j соответствует в данном случае элементу a i,j и элементу hi,j=0).
При этом управляющий вектор (2) примет вид:  , при котором коэффициенты обеих полумасок (5) и (6) обнулятся:
, при котором коэффициенты обеих полумасок (5) и (6) обнулятся:  . То есть обнулятся не только коэффициенты, которые будут перемножаться с помехами при масочной обработке (элементы a
i-1,j-1, a
i-1,j, a
i-1,j+1), но и коэффициенты, которые будут перемножаться с полезными сигналами (непораженные элементы a
i+1,j-1, a
i+1,j, a
i+1,j+1), что снижает чувствительность маски к полезным контурам.
. То есть обнулятся не только коэффициенты, которые будут перемножаться с помехами при масочной обработке (элементы a
i-1,j-1, a
i-1,j, a
i-1,j+1), но и коэффициенты, которые будут перемножаться с полезными сигналами (непораженные элементы a
i+1,j-1, a
i+1,j, a
i+1,j+1), что снижает чувствительность маски к полезным контурам.
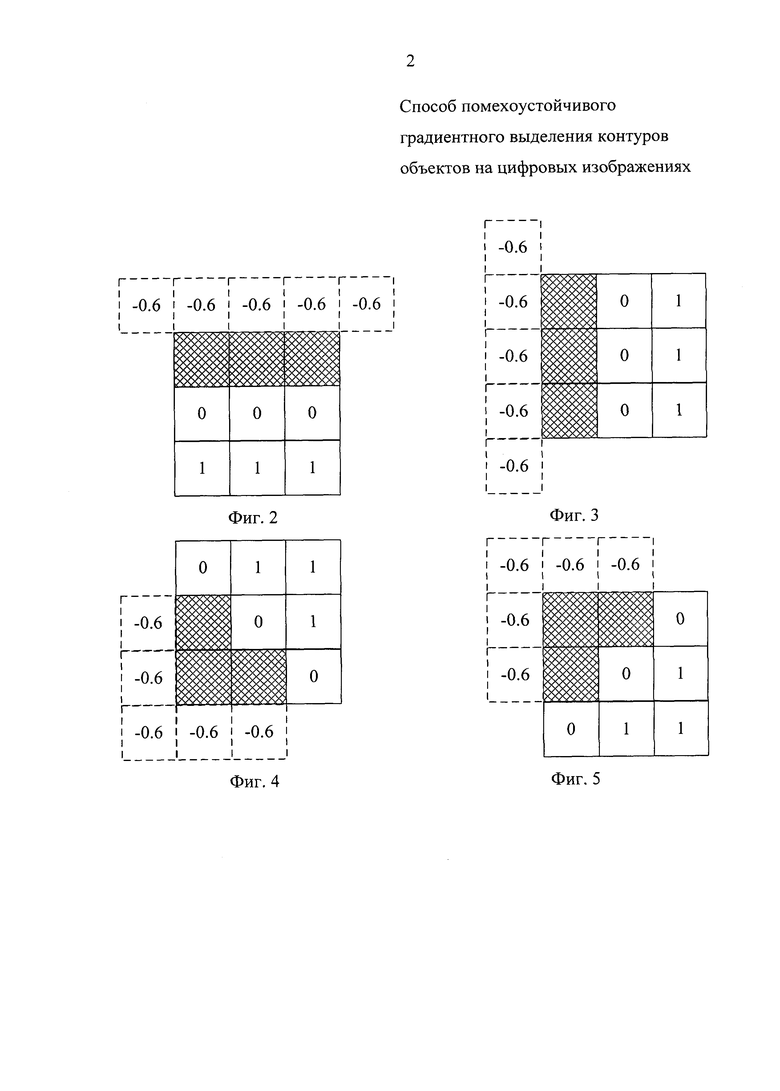
Очевидно, что в этом рассматриваемом случае более чувствительной к полезным контурам, и в той же степени устойчивой к импульсным помехам была бы маска W1, приведенная на фиг. 2, поскольку яркость в каждой точке изображения очень часто близка к яркости находящихся неподалеку точек [3]. На фиг. 2 заштрихованы элементы маски, в которые попадают импульсные помехи в рассматриваемом случае, при этом значениям весов в этих элементах присваивают нулевые значения, а саму маску увеличивают на пять ближайших внешних от центра маски (окаймляющих) элементов (что на фиг. 2 показано пунктирной линией). При этом весовым коэффициентам новых пяти элементов присваивают значения «-0.6» (чтобы сумма новых пяти элементов маски была равна сумме прежних трех значений весов, которая по модулю равна сумме значений положительных весов этой маски, показанной на фиг. 2).
Указанный случай может произойти и при вычислении трех других компонент градиента, с использованием полумасок W21 и W22, W31 и W32, W41 и W42.
Таким образом, рассмотренный способ имеет недостаток, заключающийся в недостаточной чувствительности градиентного способа обработки [12] к полезным контурам изображения.
Предлагаемый способ направлен на повышение чувствительности градиентного способа обработки [12] к контурам изображения, с сохранением устойчивости к импульсным помехам.
Рассмотрим существо предлагаемого способа. Структурная схема устройства обработки цифровых фотографий, функционирующего по предлагаемому способу, представлена на фиг. 1. Как и в прототипе [12], над матрицей регистрируемого изображения А осуществляют преобразование в блоках 1-4 (фиг. 1) для получения матриц G1, G2, G3 и G4. Далее, как и в прототипе [12], на основе матриц G1, G2, G3 и G4 по формуле (25) формируют матрицу ∇G (блок 5 на фиг. 1), после чего в блоке 6 фиг. 1 по формуле (26) осуществляют получение конечной матрицы В с результатом выделения контуров. Как и в прототипе [12], матрицу входного изображения А, помимо блоков 1-4, подают и на блок 7 и 8 фиг. 1. На выходе блока 8 получают матрицу оценок положения импульсных помех
Однако в отличие от прототипа [12], в случаях, когда все три компонента какого-либо из управляющих векторов V11, V12, V21, V22, V31, V32, V41, V42 (блоки 13-20 фиг. 1) равны единице (пиксели поражены помехами, на что указывают соответствующие элементы матрицы оценки помех), три коэффициента соответствующей полумаски обнуляют, а саму полумаску увеличивают на пять ближайших внешних (окаймляющих) к ним элемента (в блоках 1-4 фиг. 1). Весовым коэффициентам новых пяти элементов присваивают значения 0.6 того же знака, что и обнуленные коэффициенты. Полумаску увеличивают на пять ближайших внешних (окаймляющих) элементов при отсутствии помех в этих пяти элементах (на что указывают нулевые элементы матрицы оценки помех в этих пяти координатах). В случае, если какие-либо из этих пяти ближайших внешних (окаймляющих) элементов поражены помехой (на что указывают единичные элементы матрицы оценки помех в соответствующих координатах), то в блоках 1-4 фиг. 1 полумаску увеличивают на число непораженных помехами элементов. В частности, на четыре элемента, если поражен один из пяти окаймляющих элементов. При этом новым четырем весовым коэффициентам присваивают значения «0,75» того же знака, что и обнуленные коэффициенты. Если поражены два из пяти окаймляющих элемента, то в блоках 1-4 фиг. 1 полумаску увеличивают на три элемента. При этом новым трем весовым коэффициентам присваивают значения «1» того же знака, что и обнуленные коэффициенты. Если поражены три из пяти окаймляющих элемента, то в блоках 1-4 фиг. 1 полумаску увеличивают на два элемента. При этом новым двум весовым коэффициентам присваивают значения «1.5» того же знака, что и обнуленные коэффициенты. Если поражены четыре из пяти окаймляющих элемента, то в блоках 1-4 фиг. 1 полумаску увеличивают на два элемента. При этом новым двум весовым коэффициентам присваивают значения «3» того же знака, что и обнуленные коэффициенты. Если все пять окаймляющих полумаску элементов поражены помехой, то всем шести ненулевым коэффициентам соответствующей маски Превитта присваивают нулевые значения (в блоках 1-4 фиг. 1).
Так, на фиг. 2 изображена горизонтальная маска W1, которую получают по предлагаемому способу. Здесь заштрихованы элементы маски, в которые попадают импульсные помехи (пораженные элементы изображения). Горизонтальная маска W1 на фиг. 2 изображена для случая, когда элементы управляющего вектора V12 являются нулевыми (т.е. соответствующие три элемента изображения не поражены помехами), поэтому соответствующим весовым коэффициентам положительной полумаски W12 присваивают значения, равные единице. А элементы управляющего вектора V11 являются единичными (т.е. соответствующие три элемента изображения поражены помехами одновременно (заштрихованные элементы)), поэтому соответствующим весовым коэффициентам присваивают нулевые значения, а саму отрицательную полумаску W11 увеличивают на пять внешних (окаймляющих) непораженных помехами элементов (что на фиг. 2 показано пунктирной линией) и присваивают соответствующим им новым весовым коэффициентам значения «-0.6» (чтобы сумма этих пяти значений по модулю равнялась сумме значений весов по модулю второй (положительной) полумаски, т.е.  ).
).
На фиг. 3 изображена вертикальная маска W2, которую получают по предлагаемому способу. Здесь заштрихованы элементы маски, в которые попадают импульсные помехи (пораженные элементы изображения). Вертикальная маска W2 на фиг. 3 изображена для случая, когда элементы управляющего вектора V22 являются нулевыми (т.е. соответствующие три элемента изображения не поражены помехами), поэтому соответствующим весовым коэффициентам положительной полумаски W22 присваивают значения, равные единице. А элементы управляющего вектора V21 являются единичными (т.е. соответствующие три элемента изображения поражены помехами одновременно (заштрихованные элементы)), поэтому соответствующим весовым коэффициентам присваивают нулевые значения, а саму отрицательную полумаску W21 увеличивают на пять внешних (окаймляющих) непораженных помехами элементов (что на фиг. 3 показано пунктирной линией) и присваивают соответствующим им новым весовым коэффициентам значения «-0.6» (чтобы сумма этих пяти значений по модулю равнялась сумме значений весов по модулю второй (положительной) полумаски, т.е. ).
На фиг. 4 изображена для главно-диагональной маски W3, которую получают по предлагаемому способу. Здесь заштрихованы элементы маски, в которые попадают импульсные помехи (пораженные элементы изображения). Главно-диагональная маска W3 на фиг. 4 изображена для случая, когда элементы управляющего вектора V32 являются нулевыми (т.е. соответствующие три элемента изображения не поражены помехами), поэтому соответствующим весовым коэффициентам положительной полумаски W32 присваивают значения, равные единице. А элементы управляющего вектора V31 являются единичными (т.е. соответствующие три элемента изображения поражены помехами одновременно (заштрихованные элементы)), поэтому соответствующим весовым коэффициентам присваивают нулевые значения, а саму отрицательную полумаску W31 увеличивают на пять внешних (окаймляющих) непораженных помехами элементов (что на фиг. 4 показано пунктирной линией) и присваивают соответствующим им новым весовым коэффициентам значения «-0.6» (чтобы сумма этих пяти значений по модулю равнялась сумме значений весов по модулю второй (положительной) полумаски, т.е. ).
На фиг. 5 изображена побочно-диагональная маска W4, которую получают по предлагаемому способу. Здесь заштрихованы элементы маски, в которые попадают импульсные помехи (пораженные элементы изображения). Побочно-диагональная маска W4 на фиг. 5 изображена для случая, когда элементы управляющего вектора V42 являются нулевыми (т.е. соответствующие три элемента изображения не поражены помехами), поэтому соответствующим весовым коэффициентам положительной полумаски W42 присваивают значения, равные единице. А элементы управляющего вектора V41 являются единичными (т.е. соответствующие три элемента изображения поражены помехами одновременно (заштрихованные элементы)), поэтому соответствующим весовым коэффициентам присваивают нулевые значения, а саму отрицательную полумаску W41 увеличивают на пять внешних (окаймляющих) непораженных помехами элементов (что на фиг. 5 показано пунктирной линией) и присваивают соответствующим им новым весовым коэффициентам значения «-0.6» (чтобы сумма этих пяти значений по модулю равнялась сумме значений весов по модулю второй (положительной) полумаски, т.е. ).
В случае, если помехами поражены все три элемента изображения, попадающих в положительные полумаски, т.е. в полумаски W12, W22, W32, W42, то аналогичным образом, как и на фиг. 2-5, изменяют значения весовых коэффициентов и форму положительных полумасок. А именно, в случае, если при масочной обработке всем трем коэффициентам этой положительной полумаски сопоставляются для перемножения пиксели изображения, пораженные импульсной помехой (на что указывают ненулевые элементы матрицы оценок положения помех), то эти три коэффициента полумаски обнуляют, а саму полумаску увеличивают на пять ближайших внешних (окаймляющих) к ним элементов (весовым коэффициентам новых пяти элементов присваивают значения «0.6».
В случае, если помехами поражены все шесть элементов изображения, попадающих как в отрицательные (W11, W21, W31, W41), так и в положительные (W12, W22, W32, W42) полумаски, то эти шесть коэффициентов обоих полумасок обнуляют, а сами обе полумаски одновременно увеличивают на десять (по пять в два противоположных направления) ближайших внешних (окаймляющих) к ним элементов. При этом весовым коэффициентам новых пяти элементов отрицательной полумаски присваивают значения «-0.6», а коэффициентам новых пяти элементов положительной полумаски присваивают значения «0.6».
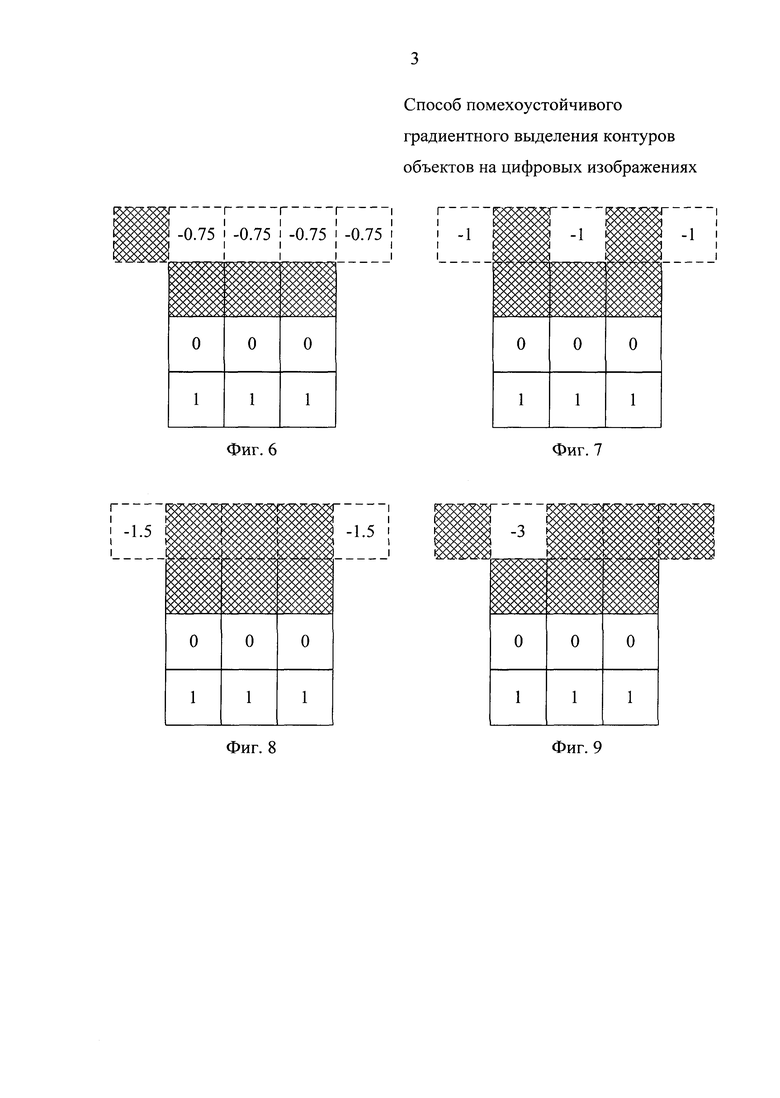
При увеличении как отрицательных (W11, W21, W31, W41), так и положительных (W12, W22, W32, W42) полумасок на новые пять ближайших окаймляющих элементов могут возникать случаи, когда какие-либо из соответствующих новым пяти элементам пиксели изображения также поражены импульсными помехами (на что указывают единичные элементы матрицы оценки помех в соответствующих координатах). В этом случае в блоках 1-4 фиг. 1 полумаску увеличивают на число непораженных помехами элементов. В частности, на четыре элемента, если поражен один из пяти окаймляющих элементов. При этом новым четырем весовым коэффициентам присваивают значения «0,75» того же знака, что и обнуленные коэффициенты. Если поражены два из пяти окаймляющих элемента, то в блоках 1-4 фиг. 1 полумаску увеличивают на три элемента. При этом новым трем весовым коэффициентам присваивают значения «1» того же знака, что и обнуленные коэффициенты. Если поражены три из пяти окаймляющих элемента, то в блоках 1-4 фиг. 1 полумаску увеличивают на два элемента. При этом новым двум весовым коэффициентам присваивают значения «1.5» того же знака, что и обнуленные коэффициенты. Если поражены четыре из пяти окаймляющих элемента, то в блоках 1-4 фиг. 1 полумаску увеличивают на два элемента. При этом новым двум весовым коэффициентам присваивают значения «3» того же знака, что и обнуленные коэффициенты. Если все пять окаймляющих полумаску элементов поражены помехой, то всем шести ненулевым коэффициентам соответствующей маски Превитта присваивают нулевые значения (в блоках 1-4 фиг. 1).
Так, на фиг. 6 изображена горизонтальная маска W1, которую получают по предлагаемому способу в случае, когда поражен один из пяти окаймляющих элементов. На фиг. 6 заштрихованы элементы маски, в которые попадают импульсные помехи (пораженные элементы изображения). Горизонтальная маска W1 на фиг. 6 изображена для случая, когда элементы управляющего вектора V12 являются нулевыми (т.е. соответствующие три элемента изображения не поражены помехами), поэтому весовым коэффициентам положительной полумаски W12 присваивают значения, равные единице. А элементы управляющего вектора VII являются единичными (т.е. соответствующие три элемента изображения поражены помехами одновременно (заштрихованные элементы)), поэтому соответствующим весовым коэффициентам присваивают нулевые значения, а саму полумаску W11 увеличивают на четыре внешних (окаймляющих) непораженных помехами элементов и присваивают соответствующим им новым четырем весовым коэффициентам значения «-0,75» (чтобы сумма этих четырех значений по модулю равнялась сумме значений весов по модулю другой (положительной) полумаски, т.е. ). На фиг. 7 показан случай, когда два из пяти элементов изображения, попадающих в увеличенную полумаску, поражены помехами, поэтому отрицательную полумаску W11 увеличивают на три элемента. При этом соответствующим масочным коэффициентам присваивают значения «-1», чтобы сумма этих трех значений по модулю равнялась сумме значений весов по модулю другой (положительной) полумаски, т.е.
). На фиг. 7 показан случай, когда два из пяти элементов изображения, попадающих в увеличенную полумаску, поражены помехами, поэтому отрицательную полумаску W11 увеличивают на три элемента. При этом соответствующим масочным коэффициентам присваивают значения «-1», чтобы сумма этих трех значений по модулю равнялась сумме значений весов по модулю другой (положительной) полумаски, т.е.  . На фиг. 8 показан случай, когда три из пяти элементов изображения, попадающих в увеличенную полумаску, поражены помехами, поэтому отрицательную полумаску W11 увеличивают на два элемента. При этом соответствующим масочным коэффициентам присваивают значения «-1.5», чтобы сумма этих двух значений по модулю равнялась сумме значений весов по модулю другой (положительной) полумаски, т.е.
. На фиг. 8 показан случай, когда три из пяти элементов изображения, попадающих в увеличенную полумаску, поражены помехами, поэтому отрицательную полумаску W11 увеличивают на два элемента. При этом соответствующим масочным коэффициентам присваивают значения «-1.5», чтобы сумма этих двух значений по модулю равнялась сумме значений весов по модулю другой (положительной) полумаски, т.е.  . На фиг. 9 показан случай, когда четыре из пяти элементов изображения, попадающих в увеличенную полумаску, поражены помехами, поэтому отрицательную полумаску W11 увеличивают на один элемент. При этом соответствующему масочному коэффициенту присваивают значение «-3», чтобы это значение по модулю равнялась сумме значений весов по модулю другой (положительной) полумаски, т.е.
. На фиг. 9 показан случай, когда четыре из пяти элементов изображения, попадающих в увеличенную полумаску, поражены помехами, поэтому отрицательную полумаску W11 увеличивают на один элемент. При этом соответствующему масочному коэффициенту присваивают значение «-3», чтобы это значение по модулю равнялась сумме значений весов по модулю другой (положительной) полумаски, т.е.  .
.
В случае, если помехами поражены элементы изображения, попадающие в новые, окаймляющие весовые коэффициенты положительных полумасок, т.е. в полумаски W12, W22, W32, W42, то аналогичным образом, как и на фиг. 6-9, изменяют значения весовых коэффициентов и форму положительных полумасок.
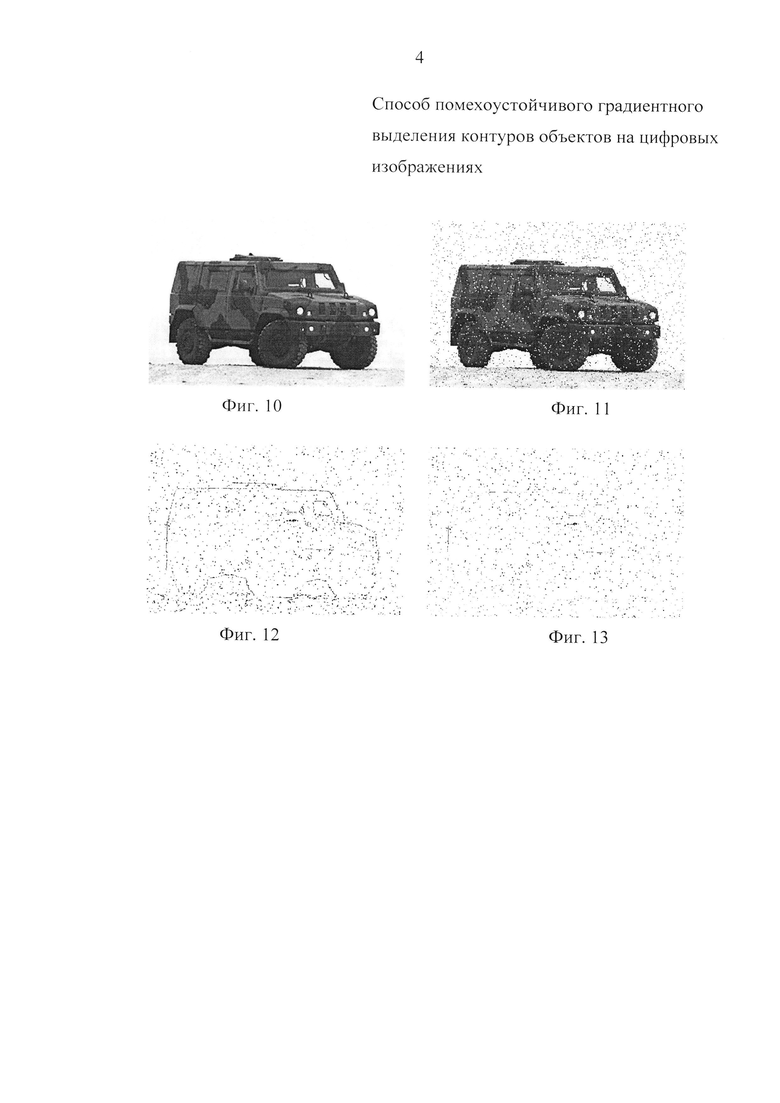
На фиг. 10-13, с целью демонстрации достигаемого технического результата, приведен результат выделения контуров объектов (В) на цифровом полутоновом изображении А (фиг. 10), зарегистрированном в условиях воздействия импульсных помех (фиг. 11) устройствами обработки изображений по предлагаемому способу (фиг. 12) и по способу-прототипу (фиг. 13). Сопоставляя между собой результаты выделения контура известным [12] и предлагаемым способом, т.е. фиг. 12 с фиг. 13, можно видеть, что заявляемый способ обладает большей чувствительностью к полезным яркостным перепадам изображения в условиях импульсных помех, поскольку свободен от рассмотренных недостатков способа-прототипа.
Результат выделения контуров объектов, приведенный на фиг. 12 и фиг. 13, получен с использованием программы, написанной в среде Matlab R2013a и реализующей совокупность действий (1)-(26), а также совокупность действий по изменению значений весовых коэффициентов и формы градиентных масок в соответствии с фиг. 2-9.
Рассмотренная работа устройства фиг. 1 показывает, что им реализуется предлагаемый способ помехоустойчивого градиентного выделения контуров объектов на изображениях.
Проведенный сравнительный анализ заявленного способа и способа-прототипа [12] показывает, что заявленный способ отличается совокупностью новых действий в блоках 1-4 фиг. 1 над материальным объектом: изменены операции изменения значений весовых коэффициентов разноориентированных градиентных масок W1, W2, W3, W4, а также введены операции изменения (увеличения) формы градиентных масок W1, W2, W3, W4, поскольку в случае, если при масочной обработке всем трем коэффициентам отрицательной или положительной полумаски сопоставляются для перемножения пиксели изображения, пораженные помехами, то эти три коэффициента полумаски обнуляют, а саму полумаску увеличивают на пять ближайших внешних (окаймляющих) к ним элементов. При этом весовым коэффициентам новых пяти элементов присваивают значения 0.6 того же знака, что и обнуленные коэффициенты при отсутствии помех в этих пяти элементах. Либо полумаску увеличивают на четыре (три, два, либо один) ближайших элемента (весовым коэффициентам которых присваивают значения 0.75 (1, 1.5, либо 3 соответственно) того же знака) при наличии одного (двух, трех, либо четырех соответственно) пораженного элемента, либо всем шести ненулевым коэффициентам маски Превитта присваивают нулевые значения, если все пять окаймляющих полумаску элементов поражены помехами. Совокупность новых действий позволяет достичь технического результата, заключающегося в повышении чувствительности способа-прототипа [12] к контурам объектов на цифровом изображении при наличии импульсных помех.
Указанный технический результат позволит осуществлять более эффективное по сравнению со способами [11, 12] распознавание слабозаметных объектов на изображениях по их контурам в условиях импульсных помех, характерных для многих практических условий передачи и преобразования цифровых изображений.
Источники информации
1. Гонсалес Р., Вудс Р. Цифровая обработка изображений. М.: Техносфера. 2005. 1072 с.
2. Хуанг Т.С. Быстрые алгоритмы в цифровой обработке изображений. М.: Радио и связь. 1984. 224 с.
3. Грузман И.С., Киричук B.C., Косых В.П., Перетягин Г.И., Спектор А.А. Цифровая обработка изображений в информационных системах: Учеб. пособие. Новосибирск: НГТУ. 2000. 168 с.
4. Ifeachor Е.С., Jervis B.W. Digital Signal Processing: A Practical Approach Second Edition. Pyc. перевод: Айфичер Э.С., Джервис Б.У. Цифровая обработка сигналов: практический подход. 2-е издание. М.: Вильяме, 2004. 992 с.
5. G.R. Cross and А.K. Jain, «Markov Random Field Texture Models» IEEE Trans, on Pattern Analysis and Machine Intelligence, 1983.
6. S. German and D. German «Stochastic Relaxation, Gibbs Distributions, and the Bayesian Restoration of Images» IEEE Trans. on Pattern Analysis and Machine Intelligence, 1984.
7. Canny J. A. Computational Approach to Edge Detection // IEEE Trans. on pattern analysis and machine intelligence. Vol. PAMI-8. 1986. №6. pp. 79-698.
8. Deriche R. Fast algorithms for low-level vision // IEEE Trans. on pattern analysis and machine intelligence. Vol. 12. 1990. pp. 78-87.
9. Курбатова E.E., Медведева E.B., Орлов И.А. Комбинированный алгоритм выделения контуров объектов интереса в мониторинговых системах // Вестник Нижегородского университета им. Н.И. Лобачевского. 2013. №2(1). С. 60-65.
10. Белим С.В., Кутлунин П.Е. Выделение контуров на изображениях с помощью алгоритма кластеризации // Компьютерная оптика. 2015. Том 39. №1. С. 119-124.
11. Самойлин Е.А. Пат. 2360289 Российская Федерация, МПК 7 G06K 9/48, H04N 1/409. Заявл. 11.08.08; опубл. 27.06.09. Бюл. №18.
12. Самойлин Е.А. Пат. 2403616 Российская Федерация, МПК 7 G06K 9/48, H04N 1/409, G06T 9/20. Заявл. 12.08.09; опубл. 10.11.10. Бюл. №31.
13. Самойлин Е.А. Алгоритмы оценивания импульсного шума в задачах цифровой фильтрации оптических изображений // Оптический журнал. 2006. Т. 73. №12. С. 42-46.
14. Самойлин Е.А., Шипко В.В., Иванов М.Г. Алгоритм обнаружения аппликативных помех на изображениях, регистрируемых трехканальным фотоприемником в условиях лазерного подавления // Радиотехника. 2014. №9. С. 68-72.
Изобретение относится к области цифровой обработки изображений. Техническим результатом является повышение чувствительности градиентного способа выделения контуров к полезным яркостным перепадам изображения в условиях импульсных помех. Предложен способ помехоустойчивого градиентного выделения контуров объектов на цифровых полутоновых изображениях. Согласно способу, предварительно осуществляют операцию оценивания положения помех на изображении, после чего для каждого элемента изображения формируют четыре разноориентированные маски Превитта, значения коэффициентов которых изменяют в зависимости от наличия и положения помех, а при наличии помех одновременно в трех элементах любой из полумасок, входящих в состав разноориентированных масок, размер полумаски увеличивают на число непораженных помехами окаймляющих элементов. Весовым коэффициентам новых элементов маски присваивают значения, сумма которых по модулю равна сумме значений по модулю второй полумаски. После этого с использованием данных масок вычисляют приближенное значение модуля градиента изображения, и путем его порогового преобразования получают контуры объектов на изображении. 13 ил.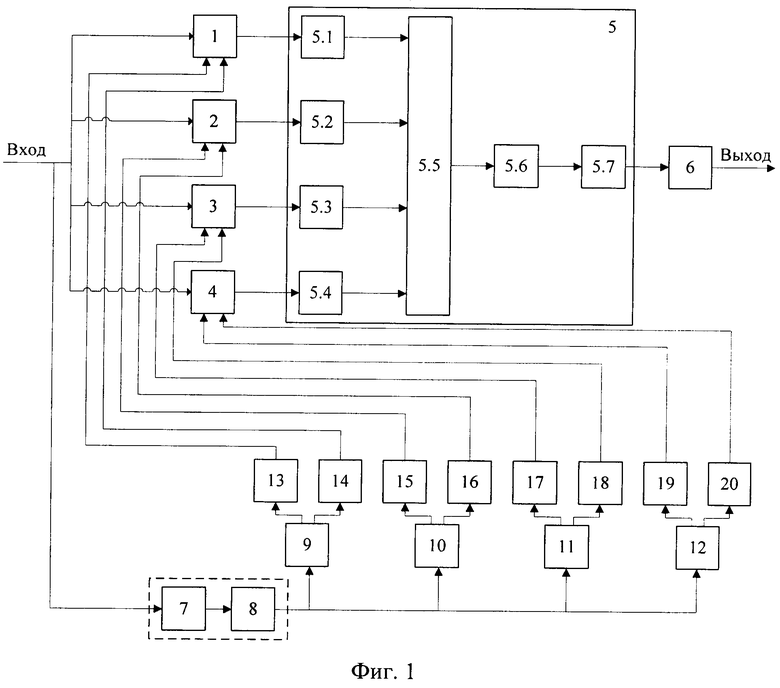
Способ помехоустойчивого градиентного выделения контуров объектов на цифровых полутоновых изображениях, заключающийся в том, что предварительно получают бинарную матрицу оценок положения помех размером с изображение, на основе которой изменяют значения весовых коэффициентов разноориентированных градиентных масок Превитта, с помощью которых вычисляют приближенное значение компонент градиента в каждой точке изображения, после чего определяют модуль градиента, и путем его порогового преобразования, на новой белой матрице черным цветом выделяют элементы, модуль градиента для которых в соответствующих координатах изображения превышает порог преобразования, отличающийся тем, что, с целью повышения чувствительности к полезным яркостным перепадам изображения в условиях импульсных помех, значения весовых коэффициентов, а также форму разноориентированных градиентных масок Превитта изменяют следующим образом: в случае, если при масочной обработке всем трем ненулевым коэффициентам одного знака, образующим отрицательную или положительную полумаску, сопоставляются для перемножения пораженные импульсными помехами пиксели изображения, на что указывают ненулевые элементы матрицы оценок положения помех, то эти три коэффициента полумаски обнуляют, а саму полумаску увеличивают на пять ближайших внешних окаймляющих к ним элементов, при этом весовым коэффициентам новых пяти элементов присваивают значения 0,6 того же знака, что и обнуленные коэффициенты, при отсутствии помех в этих пяти элементах; либо увеличивают на четыре, либо три, либо два, либо на один ближайший элемент, весовым коэффициентам которых присваивают значения 0,75, либо 1, либо 1,5, либо 3 соответственно, того же знака при наличии одного, либо двух, либо трех, либо четырех пораженных элементов соответственно; либо всем шести ненулевым коэффициентам маски Превитта присваивают нулевые значения, если все пять окаймляющих полумаску элементов поражены помехами.
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2009 |
|
RU2403616C1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2008 |
|
RU2360289C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6229578 B1, 08.05.2001 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

