Область техники
Изобретение относится к учебному оборудованию, укомплектованному устройствами нагружения и регистрации перемещений узлов и деформаций элементов исследуемой конструкции, предназначенному для использования в учебном процессе для проведения лабораторных работ и экспериментов.
Предшествующий уровень техники
Известен учебный измерительный комплекс по патенту [Учебный измерительный комплекс. Патент RU 92223, МПК G09B 7/02 (2006.01). Опубликовано 10.03.2010. Бюл. №7], который содержит базовый блок, сменный модуль, источник вторичного электропитания, блок индикации, компьютер, коммутатор, блок виртуальных приборов и шину управления, функционирование которого заключается в подаче измерительных сигналов заданной формы и параметров в исследуемую учебную схему сменного модуля, снятия картины ее физических процессов в заданных точках с получением числовых данных и их обработке, проведении виртуального эксперимента по математическим моделям компонентов учебной схемы. Однако данный учебный измерительный комплекс при использовании имеет низкую точность контроля экспериментов и, как следствие, не обеспечивает формирование у обучаемых достаточно точного представления о реальном объекте, навыков и умений обращения, идентичных при обращении с реальными конструкциями и устройствами, т.к. в процессе обучения используются не физические, а только виртуальные эксперименты.
Известна имитационная модель профессионального обучения по патенту [Имитационная модель профессионального обучения. Патент RU 69664, G09B 25/04 (2006.01). Опубликовано 27.12.2007. Бюл. №36], которая состоит из учебных блоков и блока внешнего взаимодействия, взаимосвязанных посредством информационных потоков. В состав учебных блоков включены блок управления, проектно-строительный блок, строительно-монтажный блок, блок материального обеспечения и образовательно-деловой блок, рабочие места учебных блоков и блока внешнего взаимодействия обеспечены персональными компьютерами, соединенными в локальную сеть. Однако модель по данному патенту имеет низкую точность контроля экспериментов, сложна и неудобна в учебном процессе, т.к. в процессе обучения используются не физические, а только виртуальные события, что не способствует повышению уровня технического образования и технической подготовки специалистов в области строительства при изучении курса «Металлические конструкции».
Известен стенд для экспериментальных исследований составных конструкций по патенту [Стенд для экспериментальных исследований составных конструкций. Патент RU 119111, G01N 3/00 (2006.01). Опубликовано 10.08.2012 Бюл. №22], состоящий из станины и монтажных элементов, при помощи которых исследуемая составная конструкция закреплена на станине, при этом составная конструкция состоит из левой и правой частей, связанных между собой вращательным шарниром, причем к стержням левой и правой частей составной конструкции приложены внешние сосредоточенные и распределенные силы и моменты. Однако данный стенд не обеспечивает автоматизацию проведения эксперимента в дистанционном режиме и, как следствие, не формирует навыки дистанционного управления и дистанционной калибровки и обработки результатов измерений в процессе обучения, что необходимо при мониторинге состояния конструкций, функционирующих в зонах, опасных для здоровья людей, в том числе в период ограничений по медицинским показаниям, связанным с пандемией.
Наиболее близким аналогом, выбранным в качестве прототипа предлагаемого учебно-лабораторного комплекса с дистанционным управлением для изучения напряженно-деформированного состояния металлических ферм, является «Модель несущих конструкций промышленного здания», известная из учебного пособия [«Металлические конструкции, включая сварку» для студентов направления подготовки 08.03.01 и 08.04.01 «Строительство», специальности 08.05.01 «Строительство уникальных зданий и сооружений» по специализации «Строительство высотных и большепролетных зданий и сооружений» / Сост.: В. С.Агафонкин, М.А. Дымолазов, А.Э. Фахрутдинов, М.А. Салахутдинов, Л.Р. Гимранов. - Казань: Издательство КГАСУ, 2018. - С. 43-51. https://www.kgasu.ru/upload/iblock/3c8/Posobie-15.03.2018.pdf], содержащая стержневую конструкцию, нагрузка на которую моделируется грузами, выполненными в форме полос, измерительный блок и преобразователь результатов измерений, компьютер с программой для обработки данных. Однако известная модель-прототип сложна и трудоемка в использовании, не обеспечивает возможностей дистанционного управления нагрузкой, имеет низкую точность измерений, а также не предполагает дистанционной обработки результатов измерений в режиме реального времени, что необходимо при мониторинге состояния конструкций, функционирующих в зонах, опасных для здоровья людей. Кроме того, использование полос для моделирования нагрузки на изучаемую конструкцию усложняет процесс испытаний, ограничивает функциональные возможности модели-прототипа при изучении влияния узловых нагрузок на фермы, а также исключает возможность дистанционного автоматизированного управления величиной нагрузки в процессе испытаний без участия обслуживающего персонала в условиях, представляющих опасность для людей.
Раскрытие технического решения
Технический результат от использования предлагаемого учебно-лабораторного комплекса заключается в том, что данный комплекс обеспечивает:
1) повышение точности измерений нагрузки, прикладываемой к узлам исследуемой конструкции, линейных перемещений узлов конструкции и продольных деформаций элементов конструкции;
2) автоматизацию процесса нагружения и мониторинга напряженно-деформированного состояния исследуемой конструкции (измерения линейных перемещений узлов конструкции и продольных деформаций ее элементов);
3) дистанционное проведение испытаний в режиме реального времени;
4) снижение трудоемкости проведения испытаний.
Тем самым создаются новые технические возможности для формирования у обучающихся компетенций, достаточных для работы с реальными конструкциями и устройствами, а также формирования навыков мониторинга и дистанционного управления техническим состоянием конструкций и устройств, функционирующих без прямого участия обучающихся и обучающих лиц, в том числе в зонах, опасных для здоровья людей.
Технический результат достигается тем, что учебно-лабораторный комплекс, содержит:
- основание, на которое устанавливается исследуемая конструкция;
- центральный блок коммутации, выполненный с возможностью обмена данными с ЭВМ оператора;
- по крайней мере один модуль нагружения, включающий блок управления нагружением, домкрат с электроприводом и тензодатчик измерения усилий, помещенный в металлический корпус, и прижимаемый снизу к исследуемой конструкции домкратом, причем блок управления нагружением, выполнен с возможностью обмена данными с электроприводом, тензодатчиком измерения усилий и центральным блоком коммутации;
- по крайней мере один модуль измерения линейных перемещений, включающий блок измерения линейных перемещений и электронный штангенциркуль, прикрепляемый к основанию подвижными губками и к нижней части исследуемой конструкции неподвижными губками, причем блок измерения линейных перемещений, выполнен с возможностью обмена данными с электронным штангенциркулем и центральным блоком коммутации;
- по крайней мере один модуль измерения деформации, включающий блок измерения деформации и тензодатчик измерения деформации, монтируемый на исследуемую конструкцию, причем блок измерения деформации, выполнен с возможностью обмена данными с тензодатчиком измерения деформации и центральным блоком коммутации.
Повышение точности измерений нагрузки, прикладываемой к узлам исследуемой конструкции, линейных перемещений узлов конструкции и продольных деформаций элементов конструкции достигается за счет применения высокочувствительных аналоговых и цифровых датчиков, имеющих точность измерения: тензодатчик измерения усилий - 10 Н, электронный штангенциркуль - 0,01 мм, тензодатчик измерения деформаций - 0,01 мм. Измерения нагрузки, прикладываемой к узлам исследуемой конструкции, осуществляется при помощи аналоговых тензодатчиков, помещенных в металлические корпуса и электрически соединенных с блоками управления нагрузкой через 16 битный аналого-цифровой преобразователь. Измерения линейных перемещений узлов конструкции осуществляется при помощи электронных штангенциркулей. Измерения продольных деформаций элементов конструкции осуществляется при помощи аналоговых тензодатчиков, установленных на исследуемую конструкцию и электрически соединенных с блоками измерения деформации через 16 битный аналого-цифровой преобразователь.
Автоматизация процесса нагружения и мониторинга напряженно-деформированного состояния исследуемой конструкции (измерения линейных перемещений узлов конструкции и продольных деформаций ее элементов) достигается за счет использования блоков управления нагрузкой, блоков измерения линейных перемещений, блоков измерения деформации, центрального блока коммутации и программ для ЭВМ, реализующих алгоритмы получения данных с тензодатчиков измерения усилий, электронных штангенциркулей, тензодатчиков измерения деформаций, и передачи данных на электроприводы модулей нагружения в режиме реального времени. Модули нагружения в автоматическом режиме создают нагрузку на узлы исследуемой конструкции, через которые нагрузка перераспределяется на стержни исследуемой конструкции, вследствие чего в стержнях появляются продольные (т.е. осевые) деформации, которые связаны законом Гука с продольными силами в стержнях исследуемой конструкции. Автоматизация мониторинга напряженно-деформированного состояния исследуемой конструкции осуществляется путем автоматизированного непрерывного измерения (с шагом по времени равным от 0,1 с до 10 с) линейных перемещений узлов конструкции и продольных деформаций ее элементов. Результаты мониторинга напряженно-деформированного состояния исследуемой конструкции в виде числовых массивов данных о нагрузке, линейных перемещениях узлов конструкции и продольных деформаций ее элементов автоматически, в соответствии с программой для ЭВМ центрального блока коммутации, записываются и хранятся на стандартных твердотельных накопителях.
Дистанционное проведение испытаний в режиме реального времени достигается за счет того, что данные о нагрузке, линейных перемещениях узлов конструкции и продольных деформаций ее элементов измеряются тензодатчиками измерения усилий, электронными штангенциркулями и тензодатчиками измерения деформаций в режиме реального времени, и передаются посредством блоков управления нагрузкой, блоков измерения линейных перемещений, блоков измерения деформации на центральный блок коммутации, который передает данные на ЭВМ оператора. Данные с ЭВМ оператора по сети Интернет передаются в локальную сеть, в которой предусмотрена возможность дистанционного наблюдения за моделью исследуемой конструкцией в режиме реального времени, анализа результатов измерений и управления блоками нагружения.
Снижение трудоемкости проведения испытаний достигается за счет: исключения ограничений на число участников дистанционных испытаний исследуемой конструкции в режиме реального времени; автоматизации управления нагрузкой, прикладываемой к узлам исследуемой конструкции, измерения линейных перемещениях узлов конструкции и продольных деформаций ее элементов; интерактивности работы обучающего и обучаемых.
Описание чертежей
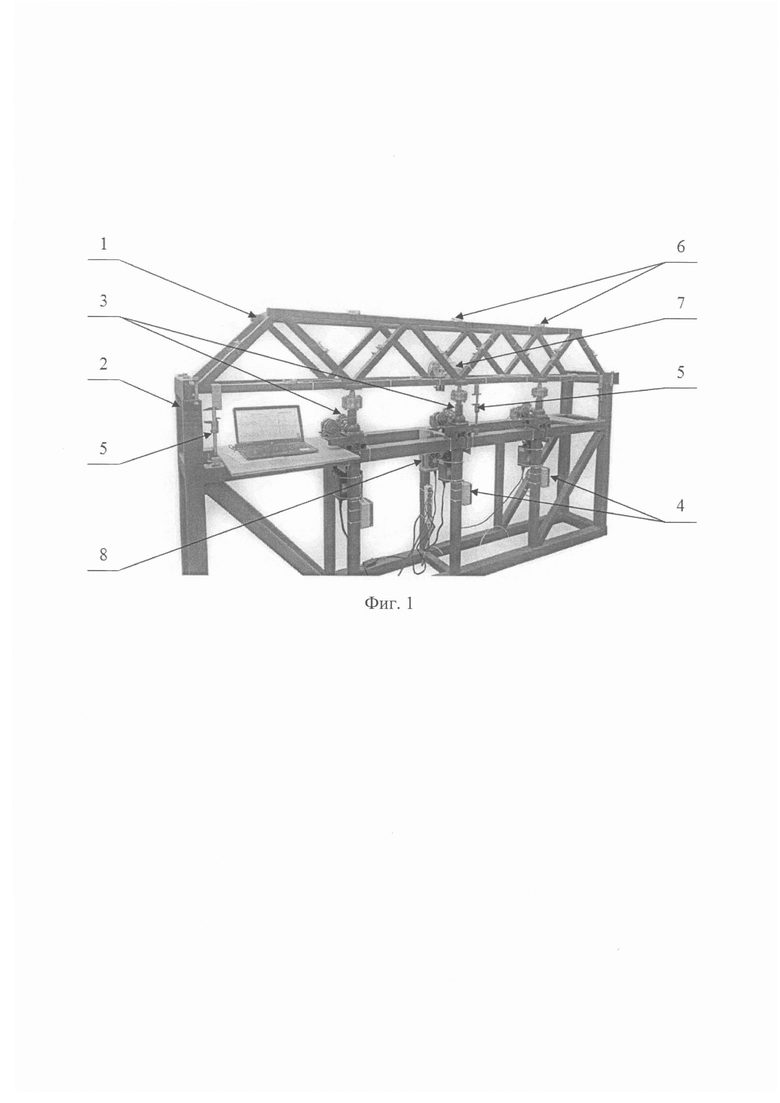
На фиг. 1 изображен общий вид учебно-лабораторного комплекса.
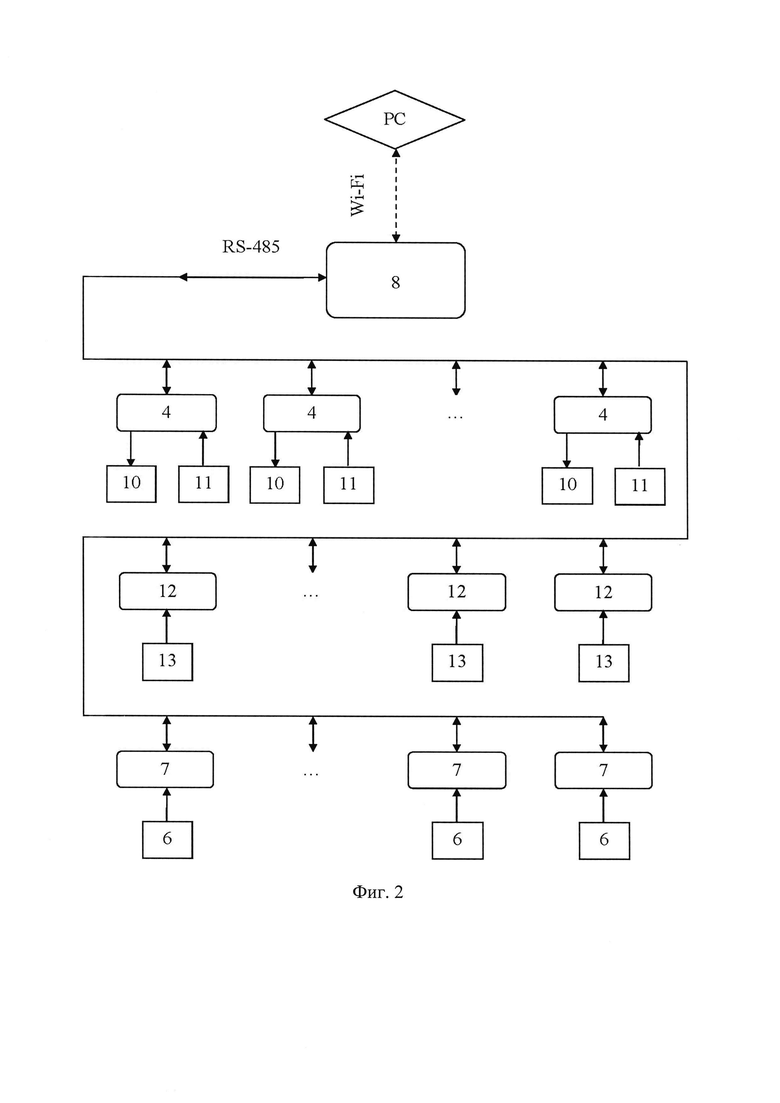
На фиг. 2 изображена структурно-логическая схема функционального взаимодействия блоков и модулей, входящих в учебно-лабораторный комплекс.
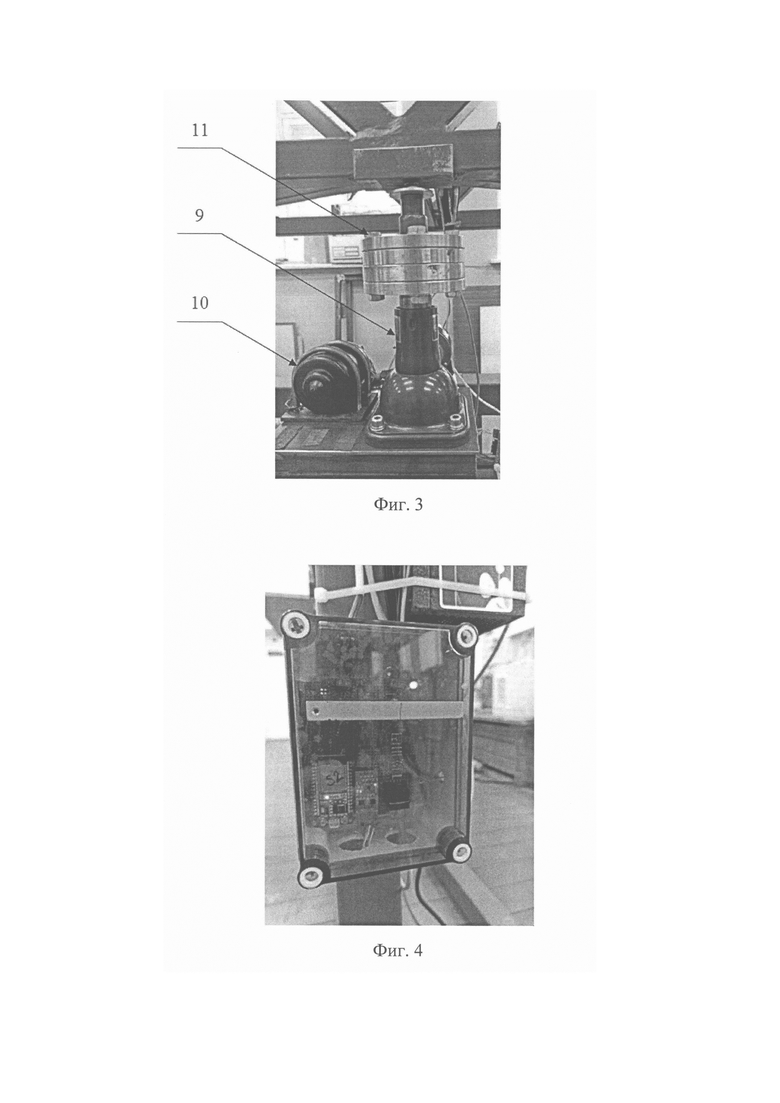
На фиг. 3 изображены элементы модуля нагружения.
На фиг. 4 изображен блок управления нагружением.
На фиг. 5 изображен модуль измерения линейных перемещений.
На фиг. 6 изображен тензодатчик измерения деформации, монтируемый на исследуемую конструкцию. Осуществление технического решения
Учебно-лабораторный комплекс состоит из (фиг. 1):
1 - исследуемой конструкции в виде стальной фермы;
2 - основания;
3 - модулей нагружения;
4 - блоков управления нагружением;
5 - модулей измерения линейных перемещений;
6 - тензодатчиков измерения деформации;
7 - блоков измерения деформации;
8 - центрального блока коммутации.
Деформация исследуемой конструкции 1 осуществляется при помощи модуля нагружения 3, состоящего из блока управления нагружением 4, механического домкрата 9, снабженного электроприводом 10 постоянного напряжения и тензодатчика измерения усилий 11 (фиг. 3 и 4). Электропривод 10, при подаче на него электропитания, приводит в движение домкрат 9, который через тензодатчик измерения усилий 11 оказывает механическое воздействие на исследуемую конструкцию 1. Направление движения домкрата 9 и величина его механического воздействия на конструкцию 1 зависят от полярности и продолжительности подачи электрического напряжения на электропривод 10. Управление электропитанием электропривода 10 и регистрация показаний тензодатчика измерения усилий 11 осуществляется посредством блока управления нагружением 4, который электрически соединен с электроприводом 10 и тензодатчиком измерения усилий 11. Блок управления нагружением 4 выполнен с возможностью обмена данными с центральным блоком коммутации 8 по проводному соединению. Принимаются команды управления электроприводом 10, передаются показания тензодатчика измерения усилий 11.
Измерение прогиба исследуемой конструкции 1 осуществляется при помощи модуля измерения линейных перемещений 5 (фиг. 5), состоящего из блока измерения линейных перемещений 12 и электронного штангенциркуля 13. Регистрация показаний электронного штангенциркуля 13 осуществляется посредством блока измерения линейных перемещений 12, который электрически соединен с электронным штангенциркулем 13. Блок измерения линейных перемещений 12 выполнен с возможностью обмена данными с центральным блоком коммутации 8 по проводному соединению. Передаются показания электронного штангенциркуля 13.
Деформация конструктивного элемента исследуемой конструкции 1 осуществляется при помощи модуля измерения деформации (фиг. 6), состоящего из тензодатчика измерения деформации 6 и блока измерения деформации 7. Регистрация показаний тензодатчика измерения деформации 6 осуществляется посредством блока измерения деформации 7, который электрически соединен с тензодатчиком измерения деформации 6. Блок измерения деформации 7 выполнен с возможностью обмена данными с центральным блоком коммутации 8 по проводному соединению. Передаются показания тензодатчика измерения деформации 6.
Управление учебно-лабораторным комплексом осуществляется посредством центрального блока коммутации 8, который выполнен с возможностью обмена данными с блоком управления нагрузкой 4, блоком измерения линейных перемещений 12 и блоком измерения деформации 7 по проводному соединению, и с ЭВМ оператора по беспроводному соединению. Центральный блок коммутации 8 в режиме реального времени получает от блоков управления нагружением 4, блоков измерения линейных перемещений 12 и блоков измерения деформации 7 показания всех тензодатчиков измерения усилий 11, электронных штангенциркулей 13, тензодатчиков измерения деформации 6 и передает их на ЭВМ оператора. Оператор отправляет команды управления учебно-лабораторному комплексу, которые получает центральный блок 8 и переадресует их блокам управления нагружением 4, блокам измерения линейных перемещений 12 и блокам измерения деформации 7.
Центральный блок коммутации 8 работает на основе программы для ЭВМ, которая осуществляет обмен данными с каждым модулем управления нагружением, модулем измерения линейных перемещений и модулем измерения деформации, посредством блоков управления нагружением 4, блоков измерения линейных перемещений 12 и блоков измерения деформации 7, а также с ЭВМ оператора. При поступлении на центральный блок коммутации 8 команды от оператора ЭВМ о начале или окончании нагружения узлов исследуемой конструкции 1 программа для ЭВМ передает эту команду блокам управления нагружением 4. При поступлении на центральный блок коммутации 8 данных о нагрузке, линейных перемещений узлов и продольных деформаций стержней от блоков управления нагружением 4, блоков измерения линейных перемещений 12 и блоков измерения деформации 7 программа для ЭВМ сохраняет эти данные и передает их на ЭВМ оператора.
Блок управления нагружением 4 работает на основе программы для ЭВМ, которая осуществляет обмен данными с электроприводом 10 и тензодатчиком измерения усилий 11. При поступлении на блок управления нагружением 4 команды от центрального блока коммутации 8 о начале или окончании нагружения узлов исследуемой конструкции 1 программа для ЭВМ подают или отключает электропитание на электропривод 10, который приводит в движение домкрат 9. При поступлении на блок управления нагружением 4 данных о нагрузке от тензодатчиком измерения усилий 11 программа для ЭВМ сохраняет эти данные и передает их на центральный блок коммутации 8.
Блок измерения линейных перемещений 12 работает на основе программы для ЭВМ, которая осуществляет обмен данными с электронным штангенциркулем 13. При поступлении на блок измерения линейных перемещений 12 данных о линейных перемещениях узлов от электронного штангенциркуля 13 программа для ЭВМ сохраняет эти данные и передает их на центральный блок коммутации 8.
Блок измерения деформации 7 работает на основе программы для ЭВМ, которая осуществляет обмен данными с тензодатчиком измерения деформации 6, монтируемым на исследуемую конструкцию. При поступлении на блок измерения деформации 7 данных о продольных деформациях стержней от тензодатчика измерения деформации 6 программа для ЭВМ сохраняет эти данные и передает их на центральный блок коммутации 8.
Учебно-лабораторный комплекс с дистанционным управлением для изучения напряженно-деформированного состояния металлических ферм работает следующим образом. Исследуемая конструкция 7 устанавливается на основание 2. После чего на исследуемую конструкцию 7 монтируются тензодатчики измерения усилий 77, электронные штангенциркули 13 и тензодатчики измерения деформации 6. Тензодатчики измерения усилий 11 должны быть расположены под узлами нижнего пояса исследуемой конструкции 1, электронные штангенциркули 13 должны быть прикреплены к стержням нижнего пояса исследуемой конструкции 1, а тензодатчики измерения деформации 6 должны быть закреплены на всех стержнях исследуемой конструкции 1. Далее оператор ЭВМ подает на центральный блок коммутации 8 команду о начале нагружения узлов исследуемой конструкции 7. Центральный блок коммутации 8 передает эту команду блокам управления нагружением 4, которые подают электропитание на электропривод 10. Электропривод 10 приводит в движение домкрат 9, который через тензодатчик измерения усилий 77 оказывает механическое воздействие на исследуемую конструкцию 7. В момент начала подачи электропитания на электропривод 10 тензодатчики измерения усилий 77 начинают измерять величину нагрузки, прикладываемой к узлам исследуемой конструкции 7, электронные штангенциркули 13 начинают измерять линейные перемещения узлов исследуемой конструкции 7, а тензодатчики измерения деформации 6 начинают измерять продольные деформации стержней исследуемой конструкции 7. Измеренные значения нагрузки тензодатчики измерения усилий 11 передают на блоки управления нагружением 4, которые в свою очередь передают эту информацию на центральный блок коммутации 8. Измеренные значения линейных перемещений узлов электронные штангенциркули 13 передают на блоки измерения линейных перемещений 12, которые в свою очередь передают эту информацию на центральный блок коммутации 8. Измеренные значения продольных деформаций стержней тензодатчики измерения деформации 6 передают на блоки измерения деформации 7, которые в свою очередь передают эту информацию на центральный блок коммутации 8. Центральный блок коммутации 8 полученные данные о нагрузке, линейных перемещений узлов и продольных деформаций стержней передает на ЭВМ оператора. По окончанию испытаний оператор ЭВМ подает на центральный блок коммутации 8 команду о прекращении нагружения узлов исследуемой конструкции 1. Центральный блок коммутации 8 передает эту команду блокам управления нагружением 4, которые прекращают подачу электропитания на электропривод 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ТРЕНИЯ ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ АНТИФРИКЦИОННЫХ МАТЕРИАЛОВ | 2024 |
|
RU2823909C1 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ СТРУКТУРНО-МЕХАНИЧЕСКИХ СВОЙСТВ ПИЩЕВЫХ МАТЕРИАЛОВ | 2001 |
|
RU2222808C2 |
| АВТОНОМНЫЙ УЗЕЛ ТРЕНИЯ ДЛЯ ИСПЫТАТЕЛЬНОГО ОБОРУДОВАНИЯ НА ТРЕНИЕ И ИЗНОС | 2024 |
|
RU2823582C1 |
| Стенд для проведения испытаний на двухосное растяжение-сжатие | 2023 |
|
RU2799978C1 |
| Устройство для определения структуры образцов при автоматизированном одноосном сжатии и способ его использования | 2023 |
|
RU2813454C1 |
| РЕОМЕТР ДЛЯ КОНТРОЛЯ ОБРАЗОВАНИЯ КИСЛОТНО-СЫЧУЖНОГО СГУСТКА | 2005 |
|
RU2304280C2 |
| Учебный прибор по сопротивлению материалов | 1989 |
|
SU1795505A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ И БОЛЕВОГО ПОРОГА СЖАТИЯ БОКОВОЙ ПОВЕРХНОСТИ СТОПЫ | 2014 |
|
RU2584115C2 |
| Устройство для исследования микромеханических свойств материалов | 1989 |
|
SU1758499A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФРИКЦИОННОЙ УСТАЛОСТИ ПОВЕРХНОСТЕЙ ПРИ ЛИНЕЙНОМ КОНТАКТИРОВАНИИ | 1997 |
|
RU2130601C1 |
Изобретение относится к учебному оборудованию, укомплектованному устройствами нагружения и регистрации перемещений узлов и деформаций элементов исследуемой конструкции, предназначенному для использования в учебном процессе для проведения лабораторных работ и экспериментов. Учебно-лабораторный комплекс содержит основание, на которое установлена исследуемая конструкция; модуль нагружения, включающий блок управления нагружением, домкрат с электроприводом и тензодатчик измерения усилий; модуль измерения линейных перемещений, включающий блок измерения линейных перемещений и электронный штангенциркуль; модуль измерения деформации, включающий блок измерения деформации и тензодатчик измерения деформации; центральный блок коммутации, электрически связанный с блоком управления нагружением, блоком измерения деформации, блоком измерения линейных перемещений и ЭВМ оператора. Технический результат: повышение точности измерений нагрузки, прикладываемой к узлам конструкции, линейных перемещений ее узлов и продольных деформаций ее элементов; автоматизацию процесса нагружения и мониторинга напряженно-деформированного состояния конструкции; дистанционное проведение экспериментов в режиме реального времени; снижение трудоемкости проведения испытаний. 6 ил.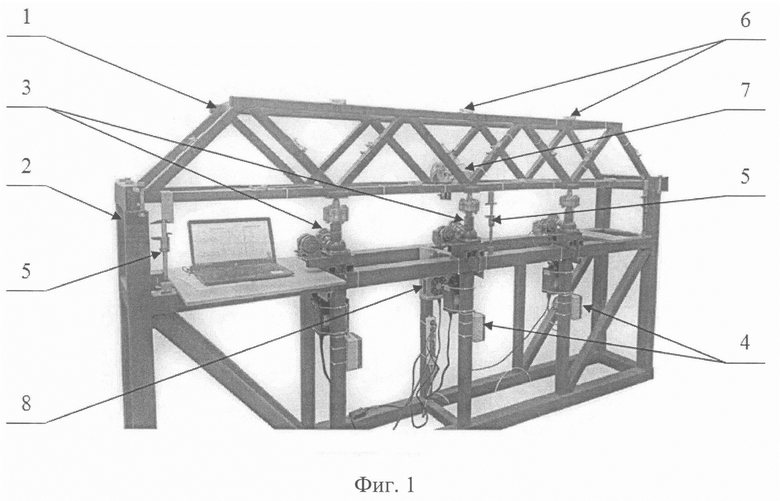
Учебно-лабораторный комплекс с дистанционным управлением для изучения напряженно-деформированного состояния металлических ферм, содержащий:
- основание, на которое устанавливается исследуемая конструкция;
- центральный блок коммутации, выполненный с возможностью обмена данными с ЭВМ оператора;
- по крайней мере один модуль нагружения, включающий блок управления нагружением, домкрат с электроприводом и тензодатчик измерения усилий, помещенный в металлический корпус и прижимаемый снизу к исследуемой конструкции домкратом, причем блок управления нагружением выполнен с возможностью обмена данными с электроприводом, тензодатчиком измерения усилий и центральным блоком коммутации;
- по крайней мере один модуль измерения линейных перемещений, включающий блок измерения линейных перемещений и электронный штангенциркуль, прикрепляемый к основанию подвижными губками и к нижней части исследуемой конструкции неподвижными губками, причем блок измерения линейных перемещений выполнен с возможностью обмена данными с электронным штангенциркулем и центральным блоком коммутации;
- по крайней мере один модуль измерения деформации, включающий блок измерения деформации и тензодатчик измерения деформации, монтируемый на исследуемую конструкцию, причем блок измерения деформации выполнен с возможностью обмена данными с тензодатчиком измерения деформации и центральным блоком коммутации.
| Напольная установка для формования саманных блоков | 1958 |
|
SU119111A1 |
| Самодействующее приспособление для закрывания газопроводов к горелкам | 1928 |
|
SU23270A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ФОРМБ1 ТЕЛ ВРАЩЕНИЯ.'-ГГ ,"• •• ';Л ^t Г .• ,1-j-oCi.u«_4lA;,n.jaTiia'^'{Г\".:".чгг"'>&i-f.»;)i-(_!.. ,БИол;;Г!?- | 0 |
|
SU169803A1 |
| CN 103115821 A, 22.05.2013. | |||
