Область применения
Устройство предлагается использовать в обувной промышленности, в частности при определении деформации и болевого порога сжатия боковой поверхности стопы. Эти данные необходимы для правильного конструирования заготовки верха обуви, подбора материала, особенно для зон локального контакта верха обуви со стопой, чтобы исключить болезненные воздействия в этих зонах на ткани боковой поверхности стопы.
Уровень техники
Известна конструкция устройства для измерения деформации и усилия сжатия плантарной части стопы, вызывающих болевые ощущения (диссертация «Исследование и разработка метода расчета стелечного узла для профилактики продольного плоскостопия», автор Куприянов Анатолий Петрович, 1999 год). С помощью этого устройства можно определить степень сжатия участков плантарной части стопы, при усилиях, соответствующих пороговым ощущениям пациента, таких как допустимые, то есть отсутствие неприятного воздействия, и вызывающих начало болевых чувств. Знание таких параметров позволяет более точно проектировать заготовку верха и изготавливать обувь повышенной комфортности.
Устройство состоит из опорной пластины с рядом отверстий, на которую устанавливается стопа испытуемого. В отверстие вставляется индентор, в конце которого находиться контактируемый с плантарной поверхностью стопы наконечник в виде полусферы.
К полусфере снизу крепится штифт, который проходит через отверстие опорной пластины. К нижнему концу штифта прикреплена тарированная пружина, опирающаяся на подвижную площадку. К последней прикреплена мерная шкала, относительно которой смещается стрелка, отмечающая усилие сжатия, прикладываемое полусферой к плантарной поверхности стопы.
Полный ход устройства фиксируется стрелкой, находящейся на подвижной площадке, перемещающейся относительно независимой мерной шкалы, которая не соединена с измерительным устройством.
Причины, не позволяющие провести с требуемой точностью измерения деформации и определить допустимый и критический уровень силы сжатия боковой поверхности стопы:
- прототип не приспособлен к измерению вертикальных участков стопы;
- точность измерения низкая из-за заложенного в приборе механического принципа приложения силы и перемещения индентора;
- погрешности измерения достаточно значительные из-за ручного прикладывания усилия измерения;
- с помощью прибора можно только косвенным методом получить требуемые данные по деформации участков плантарной части стопы.
Недостатками устройства является:
- выполнение устройства в вертикальной компоновке и неприспособленность к измерению боковой поверхности стопы;
- необходимость пересчета общей деформации устройства в деформацию поверхности стопы;
- нахождение устройства в руках человека, что из-за нестабильности движений оператора будет сказываться на точности замера.
Требуемый технический результат:
- для точности измерения и устранения дополнительных факторов, влияющих на состояние объекта измерения (столпу), последний должен находиться в стационарном положении, для проведения всей группы его измерений;
- измерительный блок должен иметь возможность быстро изменять положение относительно измеряемого объекта и мгновенно фиксироваться в выбранном положении;
- для выбранного положения стопы необходимо произвести весь комплекс воздействий на боковую поверхность измерений и деформаций, усилий сжатия при различных уровнях ощущений пациента, при этом соблюсти неизменное взаимное положение стопы и расположение измерительного комплекса, последнее осуществляется применением магнитной плиты, которая за счет силового поля удерживает измерительный комплекс в заданных строго позиционированных положениях относительно стопы;
- для реализации силового воздействия и деформирования боковой поверхности стопы в различных точках использовать измерительный комплекс, состоящий из управляемого шагового двигателя, обеспечивающего дискретность поворота вала, соединенного с преобразующей вращательное движение передачей винт - гайка, связанной с тензодатчиком, измеряющим усилие сжатия;
- для управления движением датчика усилия сжатия необходимо его последовательное перемещение, регулируемое электронным способом по дискретности хода оператором, что повысит точность реагирования пациента на прикладываемое к стопе усилие сжатия допустимого и критического уровня.
Сущность изобретения заключается в том, что с помощью предложенного устройства можно создать новое информационное обеспечение, получить более точные результаты при определении деформации и болевого порога сжатия боковой поверхности стопы, что позволяет спроектировать сберегающую здоровье обувь повышенной комфортности.
Строение стопы у каждого человека индивидуально, поэтому очень сложно воспроизвести на поверхности колодки внутреннюю форму обуви, обеспечивающую комфортность носчика. Применение этого устройства позволит определить допустимые давления, соответствующие индивидуальной форме стопы, для дальнейшего проектирования и изготовления обуви.
Устройство обладает следующими отличительными признаками.
1. Измерительный блок устройства состоит из шагового двигателя, передачи винт - гайка и тензодатчика, приводимого в действие дистанционным управляющим устройством через центральный блок управления, включающий процессор, монитор, принтер, при этом управление осуществляется оператором путем нажатия кнопок дистанционного управляющего устройства.
2. Имеется магнитная плита, состоящая из ряда управляемых электромагнитов, на которой устанавливается измерительный блок, для фиксации и освобождения измерительного блока на магнитной плите используется центральный блок управления, который передает соответствующие команды на управляемые электромагниты магнитной плиты, получаемые от дистанционного управляющего устройства, посылаемые оператором.
3. В центральный блок управления поступает одновременно сигнал усилия сжатия от тензодатчика при нажатии тканей стопы и импульсивный сигнал от дистанционного управляющего устройства, в соответствии с которым происходит деформация тканей стопы вследствие горизонтального смещения тензодатчика от передачи винт - гайка и шагового двигателя, сигнал усилия сжатия и импульсные сигналы переводятся в цифровой код, посылаемый на компьютер.
4. Гайка передачи винт - гайка выполнена в форме квадрата, нижняя сторона которого, при движении, скользит по поверхности платформы измерительного блока, что обеспечивает возвратно-поступательные движения ей самой и соединенного с гайкой тензодатчика, гайка изготавливается из немагнитного материала, например бронзы, пластмассы.
5. Согласованное функционирование измерительного блока и центрального блока управления позволяет получать результаты измерения усилия сжатия и деформации стопы по реакции испытуемого для каждой измеряемой точки боковой поверхности стопы и выводить данные измерения на монитор и принтер.
Содержание изобретения
Устройство для измерения деформации стопы состоит из:
- измерительного блока, включающего тензодатчик, передачу винт - гайка, шагового двигателя:
- тензодатчика, регистрирующего приложенное усилие сжатия, с помощью которого производится деформирование боковой поверхности стопы;
- шагового двигателя для перемещения тензодатчика, соединенного с передачей винт - гайка, которая, в свою очередь, соосно связана с шаговым двигателем;
- передачи винт - гайка, которая преобразует вращательное движение шагового двигателя в поступательное тензодатчика;
- пары платформ для стоп;
- дистанционного управляющего устройства, с помощью которого передается команда через центральный блок управления на движение измерительного блока (шаговый двигатель - винт - гайка - тензодатчик);
- центрального блока управления, включающего процессор, монитор, принтер, соединенный с тензодатчиком и шаговым двигателем, на центральный блок управления выводятся результаты измерения.
Работа устройства заключается в следующем. На закрепленной на магнитной плите паре платформ для стоп становится испытуемый. Пара платформ для стоп статична относительно магнитной плиты. Измерительный блок монтируется на платформе измерительного блока, которая взаимодействует с магнитной плитой с помощью силового поля, фиксирующего положение измерительного блока на магнитной плите в момент проведения измерения.
Управление движением измерительного блока осуществляется с помощью дистанционного управляющего устройства через центральный блок управления. Тензодатчик, находящийся на измерительном блоке, подводиться к стопе испытуемого вместе с измерительным блоком оператором при отключенном силовом поле магнитной плиты, затем измерительный блок фиксируется включением силового поля магнитной плиты в положении первичного контакта тензодатчика с боковой поверхностью стопы. С помощью дистанционного управляющего устройства через центральный блок управления подается сигнал шаговому двигателю, находящемуся в составе измерительного блока, который отрабатывает поступающие к нему импульсы в углы поворота выходного вала. Одновременно на тензоданчик поступает питание от центрального блока управления, что переводит тензодатчик в режим измерения. Углы поворота выходного вала шагового двигателя преобразуются посредством передачи винт - гайка в поступательное перемещение тензодатчика, в результате которого осуществляется сжатие ткани боковой поверхности стопы, которое регистрируется как усилие сжатия тензодатчика. Перемещение тензодатчика при сдавливании поверхности стопы приводит к деформации участка стопы, которое определяется количеством импульсов, переданных шаговому двигателю, пересчитанных в дискретное перемещение тензодатчика. Полученные данные измерения поступают на центральный блок управления, который передает их на монитор и далее на принтер.
После проведения замера усилия сжатия центральным блоком управления отключается фиксация измерительного блока на магнитной плите и оператор перемещает измерительное устройство к новой точке замера на боковой поверхности стопы. Выбранное положение снова фиксируется силовым полем и проводится следующее испытание.
После проведения испытаний и получения данных, переданных в компьютер и обработанных программным обеспечением, на мониторе выстраивается диаграммы критических (болевых) и допустимых ощущений пациента в различных точках боковой поверхности стопы.
Задачей изобретения является установить, при какой деформации боковой поверхности стопы на всех ее участках по периметру и, соответственно, при каком усилии сжатия возникают у носчика границы допустимого и критического (болезненного) уровней ощущений.
Эта информация будет использоваться конструкторами для разработки верха обуви, который при обхвате стопы не вызывает болезненных ощущений у носчика как в положении стоя, так и при ходьбе. В конструкции верха обуви должны быть учтены границы допустимых деформаций и вызываемых ими сдавливания боковой поверхности стопы.
Существенными признаками изобретения является состав элементов конструкций:
- тензодатчик нажимного типа;
- передача винт - гайка, преобразующая вращательное движение в поступательное;
- шаговый двигатель, позволяющий осуществить дискретное возвратно-поступательное движения тензодатчика посредством передачи винт - гайка;
- платформа измерительного блока, на которой крепится измерительный блок (шаговый двигатель - пара винт - гайка - тензодатчик);
- пара платформ для стоп, на которые устанавливается измеряемая стопа и стопа другой ноги, поддерживающая равновесие человека;
- магнитная плита, по которой при отключении силового поля может перемещаться платформа измерительного блока при переходе к новой точке замера стопы, при этом магнитная плита может мгновенно фиксировать выбранное положение измерительного блока;
- дистанционное управляющее устройство, позволяющее передавать импульсы через центральный блок управления на шаговый двигатель для поворота вала на дискретный угол. Дистанционное управляющее устройство сообщает сигнал фиксации и размыкания платформы измерительного устройства с магнитной плитой;
- центральный блок управления принимает сигнал от тензодатчика, который вместе с информацией об угле поворота и соответственно линейном перемещении тензодатчика, обработанными программным обеспечением, передает на принтер центрального блока управления для построения диаграммы усилия сжатия стопы - деформации стопы.
Отличительной особенностью изобретения от прототипа является использование тензодатчика электронного типа повышенной точности вместо пружинного динамометра, обладающего большой погрешностью измерения. Применение шагового двигателя, который вместе с передачей винт - гайка точно сообщает дискретное перемещение тензодатчику вместо ручной подачи в прототипе. Использование магнитной плиты, которая фиксирует положение платформы блока измерения и его самого относительно стопы вместо удержания в руках динамометра в прототипе. Передача замеров деформации и усилия в предложенном устройстве осуществляется электронным способом, тогда как в прототипе - путем считывания положения стрелок относительно шкалы.
Перечень фигур
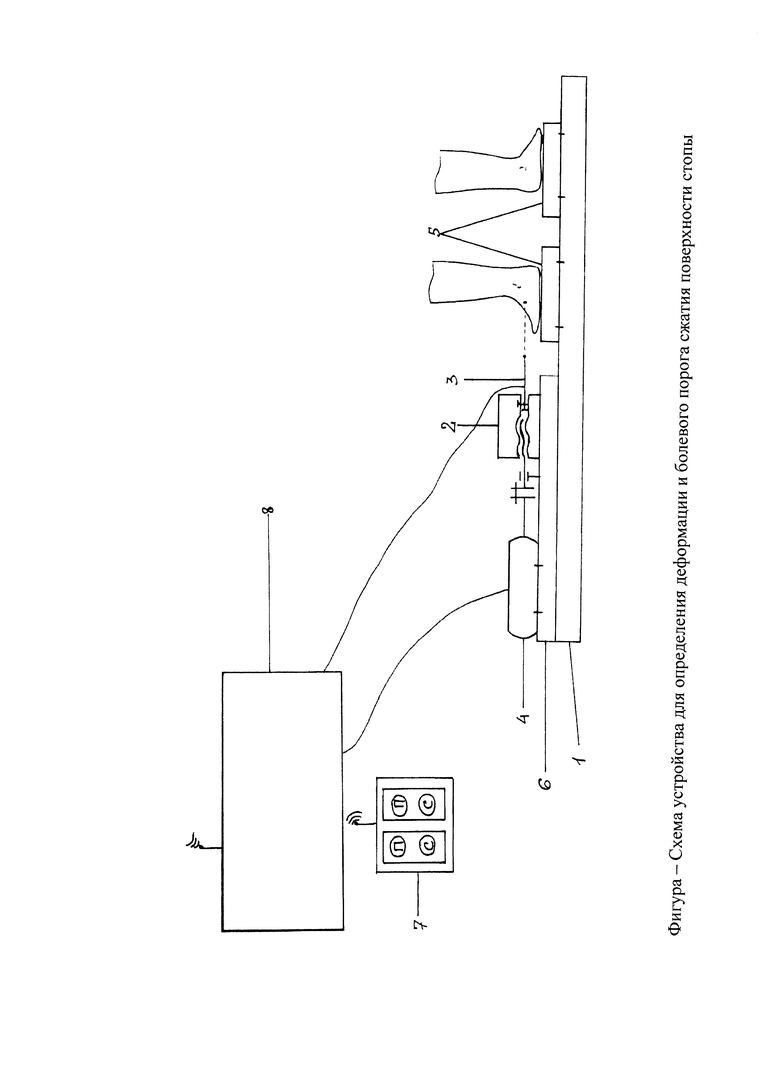
На фигуре показана схема устройства для определения деформации и болевого порога сжатия поверхности стопы, где:
1 - магнитная плита;
2 - передача винт - гайка;
3 - тензодатчик;
4 - шаговый двигатель;
5 - пара платформ для стоп;
6 - платформа измерительного блока;
7 - дистанционное управляющее устройство;
8 - центральный блок управления (процессор - монитор - принтер)
Осуществление изобретения
Описание статики
Осуществление изобретение заключается в следующем. На магнитной плите 1 расположен измерительный блок, который закреплен на платформе измерительного блока 6, имеющей возможность передвигаться относительно магнитной плиты 1 и фиксироваться на ней. Измерительный блок включает в себя шаговый двигатель 4, соединенный муфтой с винтом передачи винт - гайка 2. Для повышения стабильности соосного положения винта относительно гайки передачи винт - гайка 2 установлен подшипник, закрепленный на платформе измерительного блока. На конце гайки передачи винт - гайка 2 крепится тензодатчик 3, имеющий цилиндрическую форму. Измерительный блок фиксируется на платформе 6, причем шаговый двигатель 4 неподвижно закреплен на ней, а гайка передачи винт - гайка 2 контактирует своей боковой плоскостью с поверхностью плиты и имеет возможность скользить по ней, что обеспечивает гайке возвратно-поступательные движения при вращении винта. Шаговый двигатель 4 соединен с передачей винт - гайка 2, посредством муфты, которая сообщает вращательные движения от вала шагового двигателя 4 передаче винт - гайка 2. В гайке передачи винт - гайка 2 крепится тензодатчик 3, который предназначен для измерения усилия сжатия стопы и одновременно создавать деформацию боковой поверхности стопы, а величина деформация стопы определяется числом импульсов, поступающих от дистанционного управляющего устройства 7 и соответственно дискретных углов поворота вала шагового двигателя 4 и передаточного отношения передачи винт - гайка 2. На магнитной плите 1 закреплена пара платформ для стопы 5, на верхних плоскостях которых устанавливаются стопы пациента. Парные платформы предназначены для поддержания равновесия тела человека и проведения при необходимости на ней измерении усилия сжатия и деформации боковой поверхности обеих стоп. Для измерения внутренней боковой поверхности стоп их нужно поставить в соответствующие позиции.
В рабочее состояние измерительный блок запускается дистанционным управляющим устройством 7 через центральный блок управления 8, включающий процессор, монитор, принтер. Сигнал с дистанционного управляющего устройства 7 подается путем нажатия его кнопок. Центральный блок управления 8 функционально связан с магнитной плитой 1, шаговым двигателем 4, тензодатчиком 3, который получает электропитание и передает информацию на центральный блок управления 8. Центральный блок управления 8 через программное обеспечение фиксирует и выводит результат измерения на монитор.
Описание динамики
На пару платформ для стопы 5 встает испытуемый. Оператором выбирается начальная точка замера на боковой поверхности стопы испытуемого. К этой точке замера подводится измерительный блок так, чтобы тензодатчик 3 касался точки замера на стопе. Оператор фиксирует выбранное положение измерительного блока путем включения силового поля магнитной плиты 1, закрепляющего платформу измерительного блока 6 на ней. Далее оператор с дистанционного управляющего устройства 7 посылает через центральный блок управления 8 импульсные сигналы на шаговый двигатель 4, который приводит в движение пару винт - гайка 2. Гайка, опираясь боковой поверхностью на плоскость платформы, при повороте винта осуществляет прямолинейное перемещение, скользя по поверхности платформы измерительного блока 6. Тензодатчик 3, подведенный ранее к выбранной точке на боковой поверхности стопы, перемещается вперед, производя сжатие ткани боковой поверхности стопы. Тензодатчик 3 воспринимает усилия сжатия и передает информацию на центральный блок управления 8. Оператор посылает посредством дистанционного управляющего устройства 7 через центральный блок управления 8 импульсы на поворот шагового двигателя 4, который через передачу винт - гайка 2 приводит в движение тензодатчик 3. Величина перемещения тензодатчика и соответственно усилие сжатия контролируются по ощущениям испытуемого. Одновременно с деформацией тканей стопы происходит возрастание усилия сжатия этих тканей. Испытуемый, оценивая силу сжатия стопы тензодатчиком 3 по ощущениям, сообщает оператору, когда достигается допустимый и критический (болевой) уровни ощущений. Данные измерения - усилия сжатия и деформации стопы при приемлемых и критических (болевых) ощущениях испытуемого передаются соответствующим сигналом оператора в центральный блок управления 8, для дальнейшего построения графиков. По окончании измерения оператор с помощью дистанционного управляющего устройства 7 через центральный блок управления 8 подает импульсы на шаговый двигатель 4 для возвратного движения передачи винт - гайка 2, тензодатчика 3 и затем отключает силовое поле магнитной плиты 1. Освобожденная от фиксации платформа измерительного блока 6 перемещается оператором к новой точке измерения.
Все полученные данные передаются в центральный блок управления 8 и на мониторе выстраиваются графики:
- график изменения усилий сжатия, вызывающих допустимые ощущения по измеряемым точкам приложения нагрузки;
- график изменения усилия сжатия, вызывающих критические ощущения по измеряемым точкам приложения нагрузки;
- график изменения деформаций тканей боковой поверхности стопы, вызывающих допустимые ощущения в точках измерения;
- график изменения деформаций тканей боковой поверхности стопы, вызывающих критические ощущения в точках измерения.
На основании полученных данных конструируется заготовка верха обуви повышенной комфортности в зонах контакта заготовки верха обуви с боковыми поверхностями стопы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОЦЕНКИ СОВМЕСТИМОСТИ ТОПЛИВ ДЛЯ РЕАКТИВНЫХ ДВИГАТЕЛЕЙ С РЕЗИНОЙ, ПРИМЕНЯЕМОЙ В ТОПЛИВНЫХ СИСТЕМАХ АВИАЦИОННЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2011 |
|
RU2475738C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| ПРИБОР ДЛЯ КОМПРЕССИОННЫХ ИСПЫТАНИЙ ГРУНТОВ | 2009 |
|
RU2423682C1 |
| Установка для диффузионной сварки | 2017 |
|
RU2646517C1 |
| Пресс испытательный электрогидравлический | 2023 |
|
RU2818547C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПОРОВОГО И БОКОВОГО ДАВЛЕНИЯ В УСЛОВИЯХ КОМПРЕССИОННОГО СЖАТИЯ ГРУНТА | 2009 |
|
RU2416081C1 |
| Измерительная обувная колодка | 2018 |
|
RU2686201C1 |
| УСТРОЙСТВО ПРОТИВОСКОЛЬЗЯЩЕЙ ПОДОШВЫ ОБУВИ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ ПЕРЕМЕЩЕНИЕМ ШИПОВ | 2010 |
|
RU2416346C1 |
| СИСТЕМА ДИАГНОСТИКИ ОПОРНО-ДВИГАТЕЛЬНОЙ ФУНКЦИИ ЧЕЛОВЕКА | 1996 |
|
RU2116046C1 |
| Устройство для исследования динамики силовых движений в обуви | 1987 |
|
SU1582034A1 |
Устройство предлагается использовать в обувной промышленности, в частности при определении деформации и болевого порога сжатия боковой поверхности стопы. Эти данные необходимы для правильного конструирования заготовки верха обуви, подбора материала, особенно для зон локального контакта верха обуви со стопой, чтобы исключить болезненные воздействия в этих зонах на ткани боковой поверхности стопы. Устройство для измерения усилия сжатия и деформации стопы в соответствии с ощущениями испытуемого включает измеритель сжатия и деформации тканей стопы, процессор, монитор, принтер. Измерительный блок состоит из шагового двигателя, передачи винт - гайка и тензодатчика, приводимого в действие дистанционным управляющим устройством, имеется магнитная плита для фиксации и освобождения измерительного блока, установленного на ней путем включения и отключения силового поля. Результатом измерения являются точные замеры усилий сжатия и деформации боковых поверхностей стопы, при которых испытуемый ощущает допустимый и критический уровень тактильных воздействий. 3 з.п. ф-лы, 1 ил.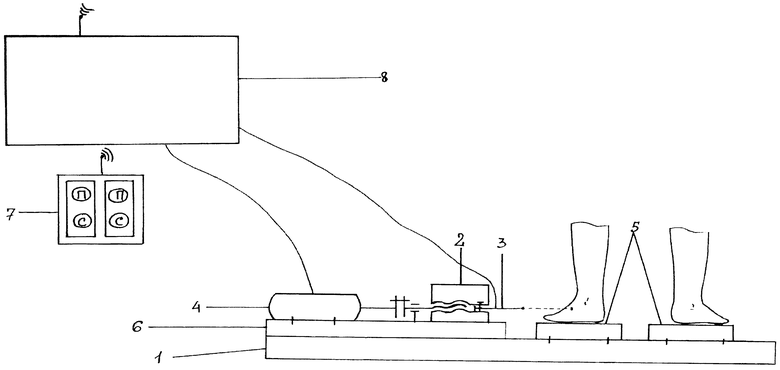
1. Устройство для измерения усилия сжатия и деформации стопы в соответствии с ощущениями испытуемого, имеющее измеритель сжатия и деформации тканей стопы, процессор, монитор, принтер, отличающееся тем, что измерительный блок состоит из шагового двигателя, передачи винт - гайка и тензодатчика, приводимого в действие дистанционным управляющим устройством, имеется магнитная плита для фиксации и освобождения измерительного блока, установленного на ней путем включения и отключения силового поля.
2. Устройство по п. 1, отличающееся тем, что в центральный блок управления поступают одновременно сигнал усилия сжатия от тензодатчика при нажатии тканей стопы и импульсный сигнал от дистанционного управляющего устройства, в соответствии с которым происходит деформация тканей стопы вследствие горизонтального смещения тензодатчика от передачи винт - гайка и шагового двигателя.
3. Устройство по п. 1, отличающееся тем, что гайка передачи винт - гайка выполнена в форме квадрата, нижняя сторона которого при движении скользит по поверхности платформы без вращения.
4. Устройство по п. 1, отличающееся тем, что согласованное функционирование измерительного блока и центрального блока управления позволяет получать результаты измерения усилия сжатия и деформации стопы по реакции испытуемого.
| TWI 227191 B1, 01.02.2005 | |||
| Управляемый мультивибратор | 1971 |
|
SU451174A1 |
| УСТРОЙСТВО ПРОТИВОСКОЛЬЗЯЩЕЙ ПОДОШВЫ ОБУВИ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ ПЕРЕМЕЩЕНИЕМ ШИПОВ | 2010 |
|
RU2416346C1 |
| DE 10211880 А1, 09.10.2003 | |||
| WO 1993025109 A1, 23.12.1993 | |||
| FR 2861846 B1, 03.02.2006 | |||
| DE 19857859 A1, 06.07.2000 | |||
| CN 103504724 A, 15.01.2014. | |||

