Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте, а именно к устройствам контроля схода подвижного состава.
Известны устройства контроля схода подвижного состава (УКСПС) с рельсов или свисания с него массивных частей за пределы нижнего габарита, описанные в патентах RU 83473, RU 178861, RU 175925, RU 186747, состоящие из электрической цепи, установленной на плоской наборной диэлектрической платформе из стеклопластика, подключённой к кабельным концевым муфтам. Электрическая цепь представляет собой установленные внутри и снаружи рельсовой колеи на наборной платформе хрупкие П-образные датчики, выполненные из металлической пластины, устанавливаемой своей плоскостью перпендикулярно направлению движения подвижного состава. В межрельсовом пространстве датчики соединены в цепь подрельсовой перемычкой. Крепление платформы в межшпальном пространстве осуществляю за счёт консолей, один конец которых монтируется к платформе болтовым соединением ближе к торцам платформы, а второй монтируется скобами к шпале.
Недостатками таких решений является следующее.
При прохождении подвижного состава происходит галопирование и скручивание платформы из-за воздействия ветровой нагрузки на плоскость датчиков. Так как платформа закрепляется в межшпальном пространстве с помощью консолей, прикрепляемых к шпале в торцах платформы, это приводит к тому, что серединная часть платформы имеет больший момент кручения, чем крайние части. Кроме того, внутренние слои материала пластин, а также сами пластины, имеют разнонаправленный момент кручения. Такое разнонаправленное воздействие на слои материала платформы и пластины слоёв платформы приводит к внутренним напряжениям и возникновению динамических нагрузок на болтовые соединения пластин и кронштейнов, к которым крепятся датчики. В результате происходит потеря целостности платформы из-за расхождения пластин и снижение надёжности болтовых креплений кронштейнов к платформе из-за постоянных вырывных нагрузок на болтовое крепление. При низкоскоростном движении подвижных составов такие факторы позволяли использовать УКСПС достаточно продолжительное время.
Наиболее близким аналогом является устройство контроля схода подвижного состава (УКСПС), содержащее электрическую цепь, выполненную из токопроводящих материалов, представляющую собой П-образные датчики, закреплённые на диэлектрической платформе разъёмными соединениями за счёт кронштейнов и соединённые разъёмными соединениями между собой в электрическую цепь, причём наружные и внутренние датчики соединены в электрическую цепь при помощи гибких подрельсовых перемычек, П-образные датчики выполнены из металлической пластины, устанавливаемой своей плоскостью перпендикулярно направлению движения подвижного состава, в обеих стойках датчика выполнены зоны предполагаемого разрушения при усилиях нагружения, превышающих нормируемые значения, а также зоны крепления датчика к кронштейну и зоны крепления датчиков в электрическую цепь, отличающееся тем, что платформа выполнена цельной из токонепроводящего влагостойкого материала по меньшей мере с одним ребром жёсткости, проходящим, по меньшей мере, вдоль продольной оси платформы, и по меньшей мере внутренние датчики установлены таким образом, что центр тяжести каждого такого датчика смещён ближе к одному и тому же ребру жёсткости относительно продольной оси платформы (RU № 2773713, B61L 23/00, 08.06.2022г.).
Недостатком известного технического решения является высокая вероятность разрушения в результате скола или схода льда, накапливаемого на днище электропоезда, что часто наблюдается при эксплуатации в зимнее время высокоскоростных поездов «Сапсан» с выходом из строя УКСПС. Поэтому их применение сопровождается высокими показателями вероятности «ложной тревоги». Кроме того, известное техническое решение не предназначено для выполнения иных задач обеспечения безопасности железнодорожного движения, например, оперативной идентификации произошедшего события. Также оно нуждаются в обеспечении электропитания, что существенно усложняет условия его эксплуатации, и зависят от надежности работы рельсовых электроцепей автоматики, сигнализации и блокировки на железной дороге. Кроме того, известное устройство не содержат защиты от электромагнитных помех.
Технический результат изобретения заключается повышении точности контроля за счет использования высокочувствительных элементов контроля для обнаружения в режиме реального времени волочения элементов и деталей с возможностью детализации зоны волочения без разрушения элементов системы при двунаправленном движении, а также в расширении функциональных возможностей за счет оперативного оповещения ответственного персонала для принятия адекватных решений по управлению движением поездов.
Технический результат достигается тем, что система контроля схода подвижного состава содержит по меньшей мере один датчик контроля, включающий n чувствительных элементов, расположенных последовательно, каждый из которых выполнен из одного и того же одномодового оптического волокна в защитной оболочке в виде катушки из m петель, закрепленной на соответствующей пластине, по краям которой жестко прикреплены одни концы пружин кручения, внутри которых установлена ось вращения, а другие концы пружин кручения жестко прикреплены к шине подрельсовой, размещенной перпендикулярно рельсам в межрельсовом пространстве и по обе стороны от них, при этом концы оптического волокна датчика контроля посредством оптической муфты подключены к одномодовому волокну магистрального волоконно-оптического кабеля, проложенного между станциями в грунте вдоль железнодорожного полотна, один конец которого соединён с герметичной заглушкой, а второй подключен через оптический коммутатор к рефлектометру, выход которого через модуль обработки соединен с входом модуля идентификации события, выход которого связан с аппаратно-программным устройством дежурного по станции, при этом рефлектометр, модуль обработки и модуль идентификации событий установлены в помещении станции.
Датчики контроля установлены в заданных местах железнодорожного пути на подъезде к станции и имеют точную геодезическую привязку.
Каждая пластина с чувствительным элементом закрыта защитным кожухом, не препятствующим ее свободному угловому перемещению.
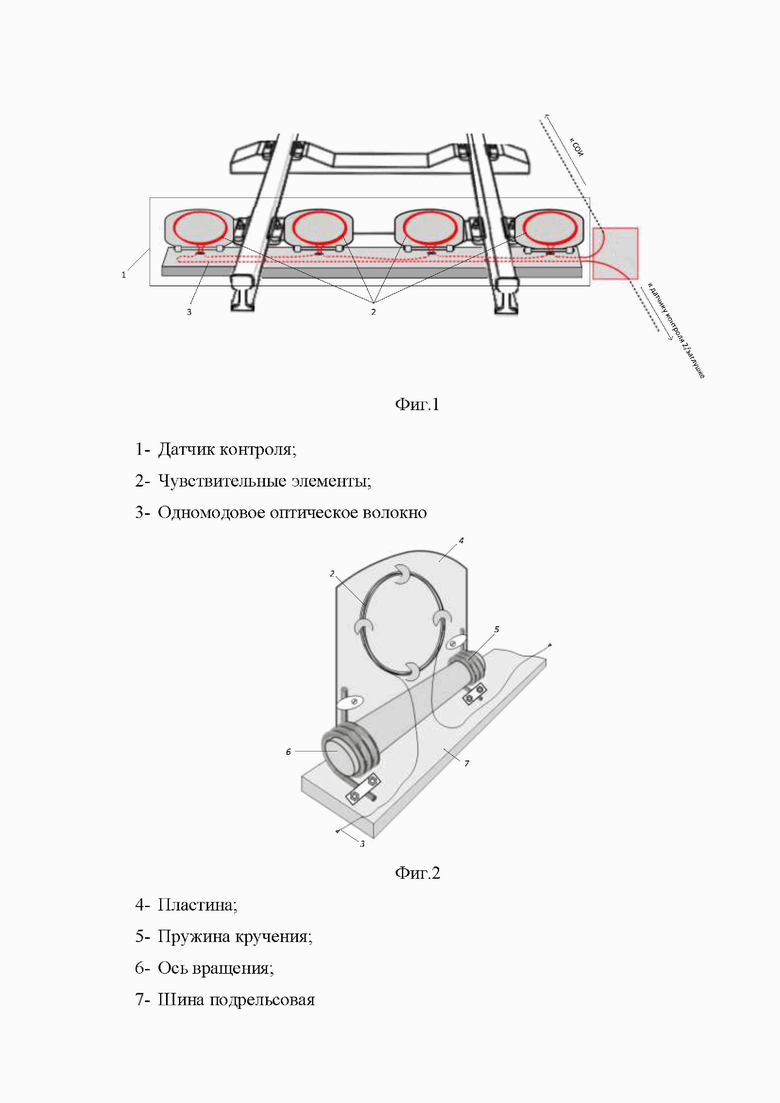
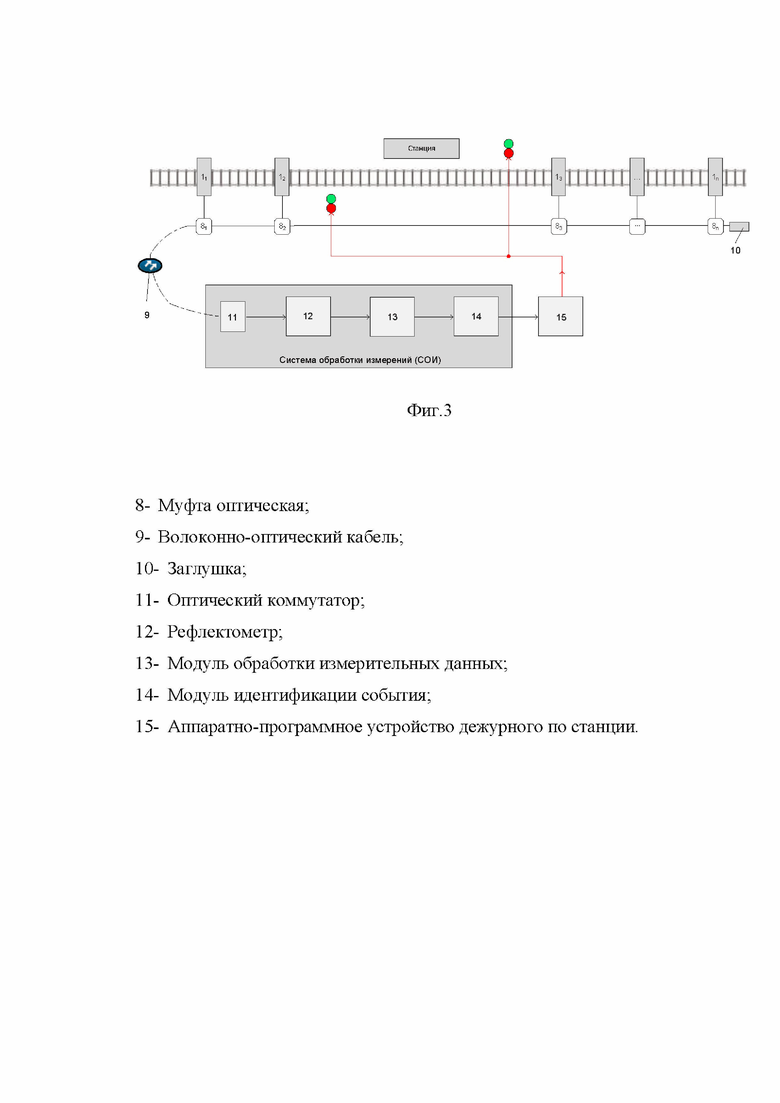
Сущность изобретения поясняется чертежами, представленными на фигурах 1-3. На фиг. 1 представлен вариант выполнения датчика контроля схода, на фиг. 2 - вариант выполнения чувствительного элемента и устройств его крепления, на фиг. 3 – структурная схема варианта выполнения системы схода подвижного состава.
Система контроля схода подвижного состава содержит по меньшей мере один датчик 1 контроля схода, включающий n чувствительных элементов 2, расположенных последовательно, каждый из которых выполнен из одного и того же одномодового оптического волокна 3 в защитной оболочке в виде катушки из m петель, зафиксированных на соответствующей пластине 4, по краям которой жестко прикреплены одни концы пружин 5 кручения, внутри которых установлена ось 6 вращения, а другие концы пружин 5 кручения жестко закреплены к неподвижной шине 7 подрельсовой, размещенной перпендикулярно рельсам в межрельсовом пространстве и по обе стороны от них.
При этом концы одномодового оптического волокна 3 датчика 1 контроля посредством оптической муфты 8 подключены к одному одномодовому волокну магистрального волоконно-оптического кабеля 9 между станциями, проложенного в грунте вдоль железнодорожного полотна, один конец которого соединён с герметичной заглушкой 10, а второй подключен через оптический коммутатор 11 к рефлектометру 12, выход которого соединен со входом модуля 13 обработки, выход которого подключен ко входу модуля 14 идентификации события, взаимодействующего с аппаратно-программным устройством 15 дежурного по станции.
Датчики 1 контроля устанавливаются в заданных местах железнодорожного пути на подъезде к станции, имеющих точную геодезическую привязку.
Каждая пластина 4 с чувствительным элементом 2 закрыта защитным кожухом (на фигуре не показан), не препятствующим ее свободному угловому перемещению.
Система контроля схода подвижного состава функционирует следующим образом.
На участке рельсошпальной решётки вдоль которого проложен в насыпи на определенной глубине вблизи от рельс волоконно-оптический кабель (ВОК) 9, крепят монтажным комплектом к шпале шину 7 подрельсовую для установки датчика 1 контроля. После чего посредством оптической муфты 8 подключают к концу ВОК 9, идущему от системы обработки измерений УКСПС (CОИ), комплект последовательно соединённых оптоволоконных чувствительных элементов 2, выполненных в виде скрученного петлями одномодового оптического волокна 3. Количество витков в чувствительном элементе 2 и общую длину применяемого для него оптического волокна 3 подбирают, исходя из мощности оптического излучателя когерентного рефлектометра 12, используемого в системе, оптических характеристик применяемого транспортного участка волоконно-оптического кабеля. Кроме того, количество витков зависит и от числа чувствительных элементов, входящих в комплект датчика контроля. Чувствительные элементы 2 фиксируются на пластине 4 посредством механических элементов крепления, обеспечивающих их плотное прилегание без пережатия оптических волокон для исключения искажения характеристик оптического излучения. Чувствительные элементы 2 прикрепляют к шине 7 подрельсовой через пружинный возвратный механизм (пружины 5 кручения), внутри которой осуществляют прокладку оптоволокона 3 обратно до оптической муфты 8 и восстанавливают магистральную линию ВОК 9, второй конец которого идёт к следующему датчику 1 контроля, либо к заглушенному концу ВОК (заглушке 10) (если это последний датчик на участке контроля).
В случае наличия у подвижного состава элемента волочения, удар при волочении приходится на тот чувствительный элемент 2, который находится на пути его движения. Ударное воздействие приводит к возникновению оптического возмущения оптического отражённого сигнала, отличающегося повышенной мощностью, наиболее сильное в том чувствительном элементе 2, корпус которого под воздействием удара не разрушается, а совершает угловое перемещение в сторону движения элемента волочения. В результате этого он пропускает элемент волочения над собой и возвращается обратно в вертикальное положение под воздействием пружин 5 кручения. На участках с разнонаправленным движением подвижного состава, диаметры пружины 5 кручения и осью 6 вращения подбирают таким образом, чтобы диаметр оси 6 вращения не препятствовал скручиванию пружины 5 на 90° при воздействии силы на пластину 4 в сторону «скручивания». При скручивании пружины 5 происходит уменьшение её диаметра и может возникнуть отсутствие возможности поворота пластины 4 в данном направлении, приводящее к эффекту «заклинивания». При условии соблюдения требования наличия запаса между размерами диаметра оси 6 вращения и диаметра пружины 5 кручения, пластина 4 сохраняет возможность осуществления свободного углового вращения в обоих направлениях.
Ударное возмущение отражается на интенсивности обратного оптического излучения в чувствительном элементе, формируемые при этом сигналы по оптическому кабелю ВОК 9 передают в систему обработки измерений (СОИ). В состав системы обработки входят: оптический коммутатор 11, рефлектометр 12, модуль 13 обработки измерительных данных, модуль 14 идентификации события. Через оптический коммутатор 11, оптическое излучение, несущее в себе отпечаток возмущения от события в виде отражений от стенок ВОК определённой части светового потока, попадает в оптический модуль рефлектометра 12. В нём осуществляют предварительную фильтрацию и усиление, а также аналого-цифровые преобразования данных измерений с последующей передачей их в модуль 13 обработки измерительных данных. В модуле 13 обработки выявляют события, которые связаны с появлением возмущений в данных измерений, определяют его амплитудно-частотные характеристики, а также данные о скорости распространения оптического импульса и времени его прохождения по ВОК. Обработанные данные, передают в модуль 14 идентификации события. В нём, на основе выявленного чувствительным элементом 2 воздействия элемента волочения и полученного результата, относящегося ко времени прохождения импульса с возмущением по ВОК, определяют факт наличия события, вызвавшего появление сигнала обратного отражения повышенной интенсивности. При обнаружении события определяют время и место его проявления, например, воздействия элемента волочения: внутри/снаружи рельсового пути, ближе к левой/правой рельсе, примерный порядковый номер вагона в составе подвижного состава, у которого выявлено волочение. Затем отслеживают проход подвижным составом следующего датчика 1 контроля. При этом определяют наличие дополнительных признаков, характеризующих идентифицируемое событие, например, повторяемость и закономерности проявления воздействия элемента волочения на датчик 1 контроля. На их основе принимают в автоматизированном режиме работы окончательное решение о наличии события, например, элемента волочения, или о случайном характере воздействия (отламывание кусков льда и воздействие их на датчик контроля у скоростных составов). Такая многоэтапная процедура уточнения произошедшего события способствует принятию адекватного решения о необходимости остановки состава.
На основе решения, принимаемого на установленном участке контроля, формируют сообщение с данными о событии (время, номер датчика 1 контроля, место его расположения и др.), которое передают на аппаратно-программное устройство 15 дежурного по станции.
При этом служебная информация высвечивается на мониторах отображения состояния участка, в случае необходимости в соответствии с протоколами, в автоматизированном режиме функционирования системы контроля схода подвижного состава могут формироваться и передаваться команды на путевые средства сигнализации и управления.
В случае схода подвижного состава происходит разрушение чувствительных элементов 2 (оптоволоконные кабели в шине подрельсовой) как минимум 2-х датчиков 1 контроля, что позволяет однозначно трактовать событие как «Сход» с выработкой последующих информационных сообщений дежурным службам. Восстановление работоспособности системы контроля схода подвижного состава состоит в замене разрушенного элемента и восстановлении датчика 1 контроля методом проведения сварочных работ на ВОК.
Установка датчиков 1 контроля в требуемом количестве целесообразна вблизи от объектов железнодорожной инфраструктуры, имеющим высокую точность геодезической привязки, например, опор контактной сети, осветительных мачт, светофоров, стрелочных развязок железнодорожных путей, которые, по статистике, являются местом наиболее частых случаев схода с рельс подвижного состава.
Для защиты оптоволоконного чувствительного элемента от грязи, воздействия воды и снега, пластину 4 корпуса элемента закрывают защитным кожухом (металлическим или полимерным), не препятствующим свободному угловому его перемещению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| Система контроля дефектов колёсных пар подвижного железнодорожного состава | 2023 |
|
RU2818020C1 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ЕГО СКОРОСТИ И ЦЕЛОСТНОСТИ | 2021 |
|
RU2794238C1 |
| УСТРОЙСТВО КОНТРОЛЯ СХОДА ПОДВИЖНОГО СОСТАВА (УКСПС) И СПОСОБ ЕГО МОНТАЖА В РАБОЧЕЕ ПОЛОЖЕНИЕ | 2021 |
|
RU2773713C1 |
| Устройство контроля нарушения нижнего габарита в железнодорожном составе (УКНГ "Неваляшка") | 2024 |
|
RU2840916C1 |
| Устройство для определения схода колесных пар подвижного состава или волочащейся металлической детали и датчик контроля схода подвижного состава | 2021 |
|
RU2770322C1 |
| Система взвешивания вагонов подвижного железнодорожного состава с использованием волоконно-оптических датчиков давления | 2023 |
|
RU2817644C1 |
| ПОДВИЖНОЕ УСТРОЙСТВО КОНТРОЛЯ СХОДА ПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2235031C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте, а именно к устройствам контроля схода подвижного состава. Система контроля схода подвижного состава содержит по меньшей мере один датчик контроля, включающий n чувствительных элементов, расположенных последовательно, каждый из которых выполнен из одного и того же одномодового оптического волокна в защитной оболочке в виде катушки из m петель, закрепленной на соответствующей пластине, по краям которой жестко прикреплены одни концы пружин кручения, внутри которых установлена ось вращения, а другие концы пружин кручения жестко прикреплены к шине подрельсовой, размещенной перпендикулярно рельсам в межрельсовом пространстве и по обе стороны от них. При этом концы оптического волокна датчика контроля посредством оптической муфты подключены к одномодовому волокну магистрального волоконно-оптического кабеля, проложенного между станциями в грунте вдоль железнодорожного полотна, один конец которого соединён с герметичной заглушкой, а второй подключен через оптический коммутатор к рефлектометру, выход которого через модуль обработки соединен с входом модуля идентификации события, выход которого связан с аппаратно-программным устройством дежурного по станции, при этом рефлектометр, модуль обработки и модуль идентификации событий установлены в помещении станции. Технический результат изобретения заключается повышении точности контроля схода подвижного состава. 2 з.п. ф-лы, 3 ил.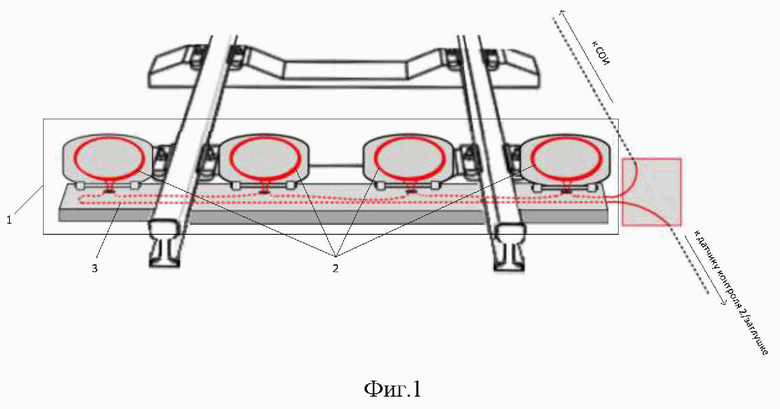
1. Система контроля схода подвижного состава, характеризующаяся тем, что содержит по меньшей мере один датчик контроля, включающий n чувствительных элементов, расположенных последовательно, каждый из которых выполнен из одного и того же одномодового оптического волокна в защитной оболочке в виде катушки из m петель, зафиксированных на соответствующей пластине, по краям которой жестко прикреплены одни концы пружин кручения, внутри которых установлена ось вращения, а другие концы пружин кручения жестко прикреплены к шине подрельсовой, размещенной перпендикулярно рельсам в межрельсовом пространстве и по обе стороны от них, при этом концы одномодового оптического волокна датчика контроля посредством оптической муфты подключены к одному одномодовому волокну магистрального волоконно-оптического кабеля, проложенного между станциями в грунте вдоль железнодорожного полотна, один конец которого соединён с герметичной заглушкой, а второй подключен через оптический коммутатор к рефлектометру, выход которого через модуль обработки соединен с входом модуля идентификации события, выход которого связан с аппаратно-программным устройством дежурного по станции, при этом рефлектометр, модуль обработки и модуль идентификации событий установлены в помещении станции.
2. Система по п. 1, отличающаяся тем, что датчики контроля установлены в заданных местах железнодорожного пути на подъезде к станции и имеют точную геодезическую привязку.
3. Система по п. 2, отличающаяся тем, что каждый чувствительный элемент закрыт защитным кожухом, не препятствующим свободному угловому его перемещению.
| Съемная купольная крыша | 1945 |
|
SU68121A1 |
| АВТОЭЛЕКТРОННЫЙ КАТОД | 0 |
|
SU180712A1 |
| WO 2022051270 A1, 10.03.2022 | |||
| US 20160046305 A1, 18.02.2016. | |||

