Устройство относится к системам для автоматического обнаружения деталей, выступающих за пределы нижнего габарита в подвижном железнодорожном составе, и остановки поезда перед железнодорожной станцией или иным искусственным сооружением и является средством, обеспечивающим безопасность движения поездов на железной дороге.
Известны устройства контроля схода подвижного состава (УКС ПС) с рельсов или свисания с него массивных частей за пределы нижнего габарита, описанные, например в патентах RU 83473 и RU 178861. Указанные устройства состоят из электрической цепи, установленной на плоской диэлектрической платформе, подключенной к кабельным концевым муфтам. Электрическая цепь представляет собой установленные внутри и снаружи рельсовой колеи на диэлектрической платформе хрупкие П-образные датчики, выполненные из плоской металлической пластины, устанавливаемой своей плоскостью перпендикулярно направлению движения подвижного состава. В межрельсовом пространстве датчики соединены последовательно в цепь подрельсовыми перемычками. При сходе колеса поезда с рельса или свисании с вагона или локомотива предметов, выходящих за нижний железнодорожный габарит, П-образная пластина соответствующего датчика (или нескольких датчиков) разрушается. В результате разрушения датчиков последовательная электрическая цепь из датчиков разрывается и срабатывают контрольные приборы, которые подают звуковой сигнал и оптический сигнал на аппарат управления дежурного по станции или на щиток управления тоннельной (мостовой) сигнализации. При этом в зависимости от места установки УКС ПС соответствующий электрический сигнал подается на звуковой извещатель и на входной семафор, что приводит к его закрытию,
К недостаткам описанных выше аналогов относятся:
- необходимость замены поврежденного (разрушенного) датчика, что приводит к необходимости остановки движения на данном участке железной дороги. Указанная процедура является достаточно трудоемкой, а ее технология описана в Технологической карте №КТП ЦШ 0243-2015, МПС РФ, 2015 г.;
- низкая оперативность системы, поскольку не предоставляется информация о порядковом номере вагона, имеющего нарушение нижнего габарита;
- отсутствие документированной и занесенной в АСУ станции прибытия привязки негабаритности к конкретному вагону и месту ее локализации под вагоном;
- необходимость тщательного и длительного осмотра всего состава для поиска предмета, нарушающего нижний габарит вагона.
Указанные недостатки существенно снижают удобство работы устройства, а именно, при срабатывании устройства ограничивают пропускную способность пути и увеличивают простой поезда на время, необходимое для выявления в составе причины срабатывания УКС ПС.
Задача идентификации единиц подвижного состава может решаться различными методами.
Известна система счета осей колесных пар (Система полуавтоматической блокировки с датчиками ДПЭП-М ЗАО «Уралжелдоравтоматизация». Журнал «Промышленный транспорт Урала», №9,2007 г., стр. 30). Однако указанная система не позволяет выявить единицу подвижного состава с нарушением нижнего габарита.
Известно устройство, реализующее способ идентификации подвижных единиц железнодорожного транспорта RU 2280580, в котором используются два путевых колесных датчика, находящихся на фиксированном расстоянии друг от друга, меньшем, чем минимальное расстояние между внутренними колесными парами подвижной единицы, таймер временных меток, привязывающий временную систему отсчета к движущемуся составу. В результате работы системы определяются межосевые расстояния подвижных единиц, которые сравниваются с данными по структуре межосевых расстояний колесных пар, предварительно занесенных в память аппаратных средств. Однако, как и предыдущий аналог, указанная система не позволяет выявить единицу подвижного состава с нарушением нижнего габарита.
Аналогичным недостатком отличается и выбранное за прототип устройство контроля схода подвижного состава RU 2475394, содержащее перемычки и поперечины, установленные на пути и контролирующие нижний габарит состава, путевой датчик, таймер, видеорегистратор, сообщенные со счетно-решающим устройством, имеющим возможность передавать информацию на средство связи с диспетчерским пунктом. Устройство отличается тем, что путевой датчик установлен на конструктивно минимально возможном расстоянии от перемычек и поперечин, а видеорегистратор установлен на расстоянии и под углом от перемычек и поперечин, при которых впоследствии по его записи возможно невооруженным глазом определение типа подвижных единиц и отмеченного места их негабаритности с точностью, достаточной для наибыстрейшего ее поиска. Кроме того, устройство снабжено отметчиком моментов времени поступления сигналов о прохождении колесных пар над путевым датчиком, сообщенным с путевым датчиком, счетно-решающим устройством и таймером, и отметчиком меток, сообщенным с путевым датчиком, видеорегистратором и счетно-решающим устройством, для нанесения меток негабаритной подвижной единицы в память счетно-решающего устройства и в материалы видеонаблюдения, а алгоритм идентификации подвижных единиц счетно-решающим устройством с помощью данных меток имеет возможность учитывать динамические характеристики и для, например, четырехосного вагона основан на формуле 
где S - расстояние между первой и последней осями вагона;
s1 - расстояние между осями первой тележки;
s2 - расстояние между осями последней тележки;
t1 - интервал времени прохождения над педалью первой и второй осей первой тележки;
t2 - интервал времени прохождения над педалью первой и второй осей последней тележки;
Т - время прохождения над педалью несущей платформы вагона, определенное по разнице текущего времени с момента прохождения первой оси и последней;
 - скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
- скорость движения состава над педалью в момент времени прохождения первой тележки вагона;
 - скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
- скорость движения состава над педалью в момент времени прохождения последней тележки вагона.
К недостаткам прототипа следует отнести следующие факторы, снижающие его эксплуатационные характеристики:
- в качестве датчиков нижней негабаритности единиц подвижного состава используются установленные перпендикулярно рельсовому пути разрушаемые поперечины, связанные перемычками. Разрушение поперечин требует их замены, что предусматривает остановку движения поездов на данном участке;
- приведенная в описании к RU 2475394 методика определения места локализации нарушения нижнего габарита единицы подвижного состава работоспособна при допущении, что каждая единица подвижного состава в момент прохождения путевого датчика движется либо с постоянной скоростью, либо равноускоренно (равнозамедленно). Такое допущение не является корректным, т.к. при заходе на станцию в режиме подтормаживания неизбежно возникают продольные ускорения вагонов из-за зазоров в сцепках и упругости пружин сцепок. Несоответствие движения единиц подвижного состава требованиям равномерного, либо равноускоренного (равнозамедленного) движения может привести к нарушению определения места локализации нарушения нижнего габарита;
- для работы устройства необходим ввод в память вычислителя данных о расстояниях между колесными парами подвижных единиц состава, что увеличивает объем информации, вводимой в АСУ железной дороги при формировании состава, и соответственно, трудоемкость работы по подготовке АСУ станции прибытия;
- необходимость установки путевого датчика на минимальном конструктивно возможном расстоянии от перемычек и поперечин, что снижает как надежность самого датчика, так и всей системы в целом;
- сложность устройства.
Целью создания данного изобретения является устранение указанных недостатков прототипа, а именно, повышение эксплуатационных характеристик УКС ПС за счет исключения необходимости замены разрушенных планок датчиков, что предотвращает необходимость остановки движения составов после срабатывания УКС ПС, а также обеспечения высокоточной локализации места негабарита в составе независимо от характера движения единиц подвижного состава, т.е. при неравномерной скорости, толчках и рывках.
Указанная выше цель создания изобретения обеспечивается тем, что боковые опоры проходят через ориентированные своей длинной стороной вдоль железнодорожного пути прямоугольные прорези в платформе, снабженные уплотнениями, установлены на горизонтальных осях с возможностью их поворота в кронштейнах, закрепленных на платформе снизу, и связаны с устройствами их возврата в вертикальное положение и датчиками их отклонения от вертикального положения, имеется установленный горизонтально и перпендикулярно рельсовому пути однолучевой лазерный дальномер и контроллер, входы которого через пороговые устройства соединены с соответствующими датчиками отклонения боковых опор, первый выход - с устройством управления входным семафором, а второй выход - с вычислительной машиной оператора станции, также связанной с выходом однолучевого лазерного дальномера.
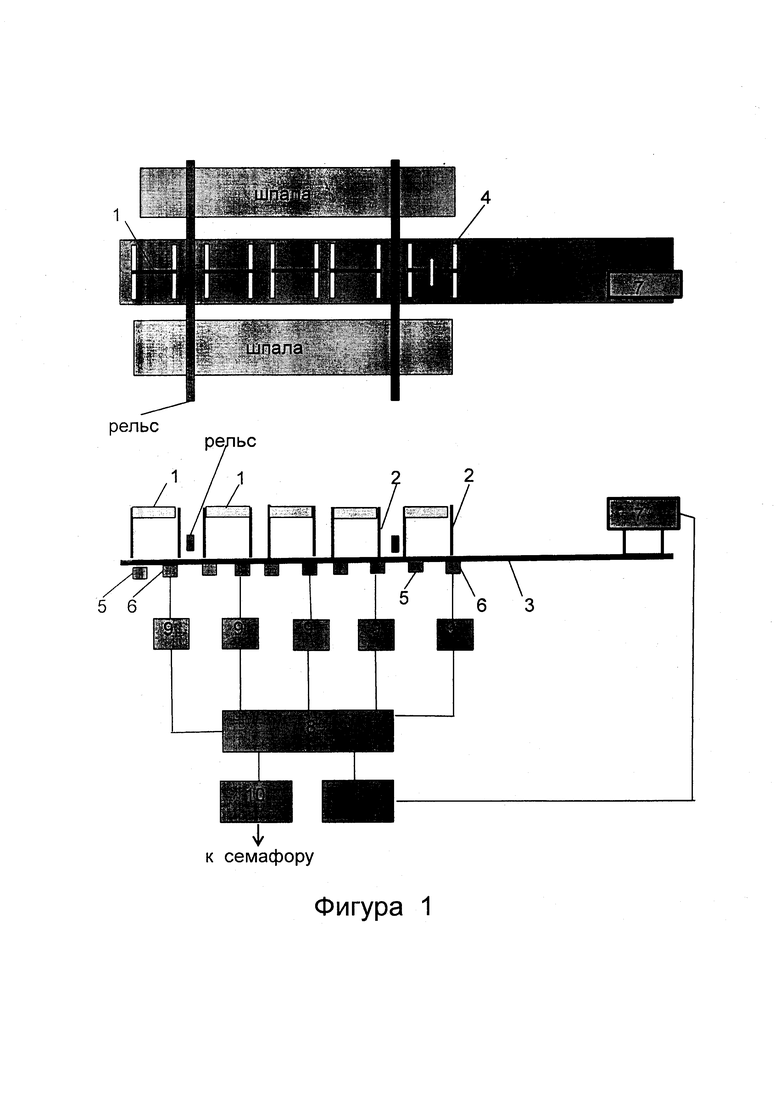
Схема построения устройства показана на фигуре 1.
При реализации цели создания изобретения устройство, схема которого показана на фигуре 1, содержит П-образные датчики, включающие в свой состав горизонтальные пластины 1, закрепленные на боковых опорах 2, причем датчики установлены в ряд внутри и снаружи рельсовой колеи на размещенной в межшпальном пространстве платформе 3, при этом каждый датчик ориентирован своей плоскостью перпендикулярно направлению движения подвижного состава. Боковые опоры 2 проходят через ориентированные своей длинной стороной вдоль железнодорожного пути прямоугольные прорези 4 в платформе 3, снабженные уплотнениями. Сами боковые опоры 2 установлены на горизонтальных осях с возможностью их поворота в кронштейнах (на фигуре 1 не показаны), закрепленных на платформе 3 снизу, и связаны с устройствами 5 их возврата в вертикальное положение и датчиками 6 их отклонения от вертикального положения. Также устройство содержит установленный горизонтально и перпендикулярно рельсовому пути однолучевой лазерный дальномер 7 и контроллер 8, входы которого через пороговые устройства 9 соединены с соответствующими датчиками 6 отклонения боковых опор 2 от вертикального положения, первый выход - с устройством управления 10 входным семафором, а второй выход - с вычислительной машиной 11 оператора станции, также связанной с выходом однолучевого лазерного дальномера 7.
При практической реализации устройства могут быть использованы следующие технические решения. Датчики негабаритности, а именно пластины 1 и опоры 2 могут быть изготовлены из листового металла с соответствующим антикоррозионным покрытием. Платформа 3 выполняется преимущественно из изолирующего материала (стеклотекстолит). Уплотнения в прямоугольных прорезях 4 платформы 3, обеспечивающие защиту расположенных под платформой 3 составных частей устройства выполняются из резиновых пластин с прорезями, в которых перемещаются поворачивающиеся на осях при фиксации негабарита боковые опоры 2 датчиков негабарита. Конструкция кронштейнов крепления осей опор 2 произвольна. Размещение кронштейнов под платформой 3 обусловлено требованием их защиты от пыли и грязи, которые осыпаются с нижней части вагона при движении. Устройства 5 возврата опор 2 в вертикальное положение после их наклона при фиксации негабарита могут быть реализованы на основе противовесов (по принципу «куклы-неваляшки») или спиральных пружин. Датчики 6 поворота опор 2 могут быть реализованы на потенциометрах, синусно-косинусных вращающихся трансформаторах или иных устройствах для измерения угла. В качестве однолучевого лазерного дальномера 7 можно использовать любой дальномер с дальностью действия до 10…20 м, размещенный в герметизированном кожухе, например, лазерный дальномер БИП-1 ФКНП.468166.001 производства ПК «НПК «АВТОМАТИЗАЦИЯ». Лазерный дальномер 7 размещается на расстоянии нескольких метров от рельса, что позволяет защитить его от пыли и грязи, осыпающихся с вагонов при движении. Возможно его расположение на вынесенной за габариты шпал платформе 3. При этом информация от него может быть выведена на установленный на платформе 3 единый для всего устройства сигнальный разъем, к которому также подключены выходы пороговых устройств 10. Контроллер 8 может быть реализован на типовой микро-ЭВМ, снабженной многовходовой платой ввода-вывода, например, семейства PCI Express. Пороговые устройства 9 реализуются на компараторах с заданным порогом отклонения датчиков негабаритности от вертикального положения. Наличие пороговых устройств 9 необходимо для защиты устройства от ложного срабатывания при незначительных отклонениях датчиков негабаритности, обусловленных не связанными с нарушением негабаритности причинами - отклонение при порывах ветра, при вибрациях платформы 3 с датчиками и т.п. Практически пороговые устройства 9 настраивают таким образом, что они формируют сигнал на своем выходе при отклонении датчиков негабаритности от вертикали на угол более 20-35°. Устройство управления входным семафором 10 и вычислительная машина 11 оператора станции являются типовыми элементами оснащения современной железнодорожной станции.
При реализации цели создания изобретения работа устройства осуществляется следующим образом.
При прохождении железнодорожного состава плоскости датчиков негабаритности вертикальны, углы поворота опор 2 близки к нулю и сигналы на выходах пороговых устройств 9 отсутствуют. На выходе лазерного дальномера 7 имеется информация об отсутствии факта прохождения состава, т.к. на его пути отсутствуют препятствия в виде колес вагонных тележек. При движении состава начинается процесс счета колесных осей в составе, начиная от головы поезда. При этом при пересечении каждого колеса тележки лазерного луча на входе лазерного дальномера формируется отраженный от колеса световой импульс, при этом на выходе лазерного дальномера 7 формируется сигнал, поступающий в вычислительную машину 11, которая ведет подсчет осей (колес), прерывавших лазерный луч. В случае наезда подвагонной негабаритности на один из датчиков негабаритности опоры соответствующего датчика поворачиваются на установленных в кронштейнах под платформой 3 осях на угол, превышающий установленный порог срабатывания датчика (ориентировочно свыше 35-45°). При этом на выходе соответствующего порогового устройства 9 появляется сигнал, поступающий в контроллер 8, который передает соответствующие сигналы на устройство управления 10 входным семафором, а также - на вычислительную машину 11 оператора станции, а при необходимости - и на звуковой извещатель на станции прибытия. При этом входной семафор закрывается и состав останавливается машинистом, а в вычислительной машине 11 оператора станции фиксируется факт обнаружения нарушения нижнего габарита и происходит привязка данного факта к номеру оси в составе и к конкретному сработавшему датчику, что позволяет, зная количество осей под каждой из прошедших единиц подвижного состава, определить номер вагона с негабаритом и локализовать место расположения негабарита под вагоном как по длине вагона, так и по ширине.
После прохождения негабарита опоры 2 соответствующего датчика негабарита при помощи устройств 5 возврата опор 2 в вертикальное положение поворачиваются в исходное вертикальное положение и датчик негабарита вновь готов к работе.
Таким образом, заявляемое устройство не требует проведения длительных работ по замене разрушенных датчиков негабарита, что неизбежно привело бы к остановке движения железнодорожных составов, а также обеспечивает простую локализацию места расположения негабарита в составе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНО-ГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2021 |
|
RU2764816C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| Автоматизированный пост динамического взвешивания железнодорожных составов (АПДВ) | 2023 |
|
RU2828636C1 |
| Автоматизированная система взвешивания подвижного состава (АСВ ПС) | 2022 |
|
RU2793987C1 |
| Способ автоматизированного учета вагонов и контейнеров в движущемся железнодорожном составе | 2022 |
|
RU2784230C1 |
| Автоматизированная система контроля инвентарных номеров вагонов | 2018 |
|
RU2682126C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
Изобретение относится к путевым устройствам для управления подвижным составом. Устройство контроля нарушения нижнего габарита в железнодорожном составе содержит П-образные датчики, включающие в свой состав горизонтальные пластины, закрепленные на боковых опорах, устройства их возврата в вертикальное положение, датчики их отклонения от вертикального положения, лазерный дальномер, пороговые устройства и контроллер. Причем датчики установлены в ряд внутри и снаружи рельсовой колеи на размещенной в межшпальном пространстве платформе. Боковые опоры проходят через прямоугольные прорези в платформе, установлены на горизонтальных осях с возможностью их поворота в кронштейнах, закрепленных на платформе снизу, и связаны с устройствами их возврата в вертикальное положение и датчиками их отклонения от вертикального положения. Входы контроллера через пороговые устройства соединены с соответствующими датчиками отклонения боковых опор от вертикального положения. Первый выход контроллера соединен с устройством управления входным семафором, а второй выход – с вычислительной машиной оператора станции, также связанной с выходом однолучевого лазерного дальномера. Технический результат заключается в повышении эксплуатационных характеристик устройства контроля, а также в обеспечении простой локализации места расположения негабарита в составе. 1 ил.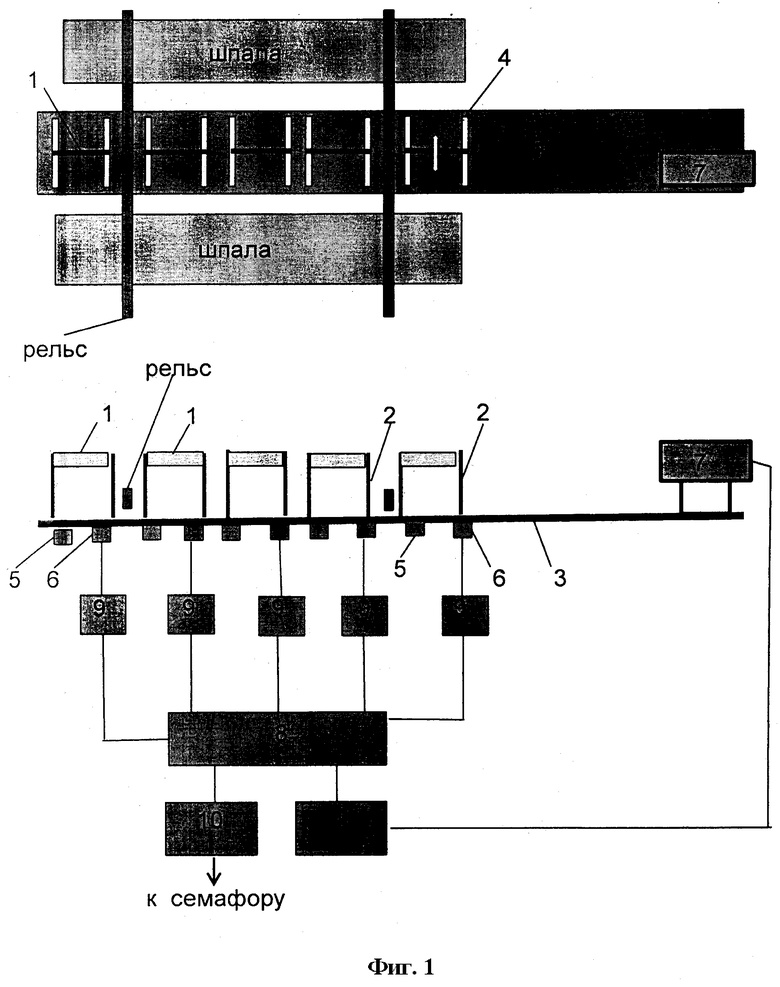
Устройство контроля нарушения нижнего габарита в железнодорожном составе, содержащее П-образные датчики, включающие в свой состав горизонтальные пластины, закрепленные на боковых опорах, причем датчики установлены в ряд внутри и снаружи рельсовой колеи на размещенной в межшпальном пространстве платформе, при этом каждый датчик ориентирован своей плоскостью перпендикулярно направлению движения подвижного состава, отличающееся тем, что боковые опоры проходят через ориентированные своей длинной стороной вдоль железнодорожного пути прямоугольные прорези в платформе, снабженные уплотнениями, установлены на горизонтальных осях с возможностью их поворота в кронштейнах, закрепленных на платформе снизу, и связаны с устройствами их возврата в вертикальное положение и датчиками их отклонения от вертикального положения, имеется установленный горизонтально и перпендикулярно рельсовому пути однолучевой лазерный дальномер и контроллер, входы которого через пороговые устройства соединены с соответствующими датчиками отклонения боковых опор от вертикального положения, первый выход - с устройством управления входным семафором, а второй выход - с вычислительной машиной оператора станции, также связанной с выходом однолучевого лазерного дальномера.
| КЛАПАН С ЭЛЕКТРОМАГНИТНЫМ УПРАВЛЕНИЕМ | 0 |
|
SU210590A1 |
| УСТРОЙСТВО КОНТРОЛЯ СХОДА ПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2475394C1 |
| EP 4015344 A1, 22.06.2022 | |||
| KR 101915500 B1, 08.11.2018 | |||
| RU 178861 U1, 19.04.2018. | |||

