Изобретение относится к измерительной технике, предназначено для измерения параметров гравитационного поля Земли (ГПЗ) с помощью лазера и катушек оптического волокна, в том числе разности гравитационных потенциалов и разности ортометрических высот в пространственно разнесенных точках на поверхности Земли. Измерения могут использоваться для глобального поиска и определения запасов полезных ископаемых, для уточнения моделей гравитационного поля, прогноза землетрясений, предсказаний изменений климата, а также для подготовки глобальных навигационных гравиметрических карт.
Известен способ-аналог определения разности высот (превышений) точек на поверхности Земли с использованием электронного тахеометра, основанного на использовании лазерных измерений [1].
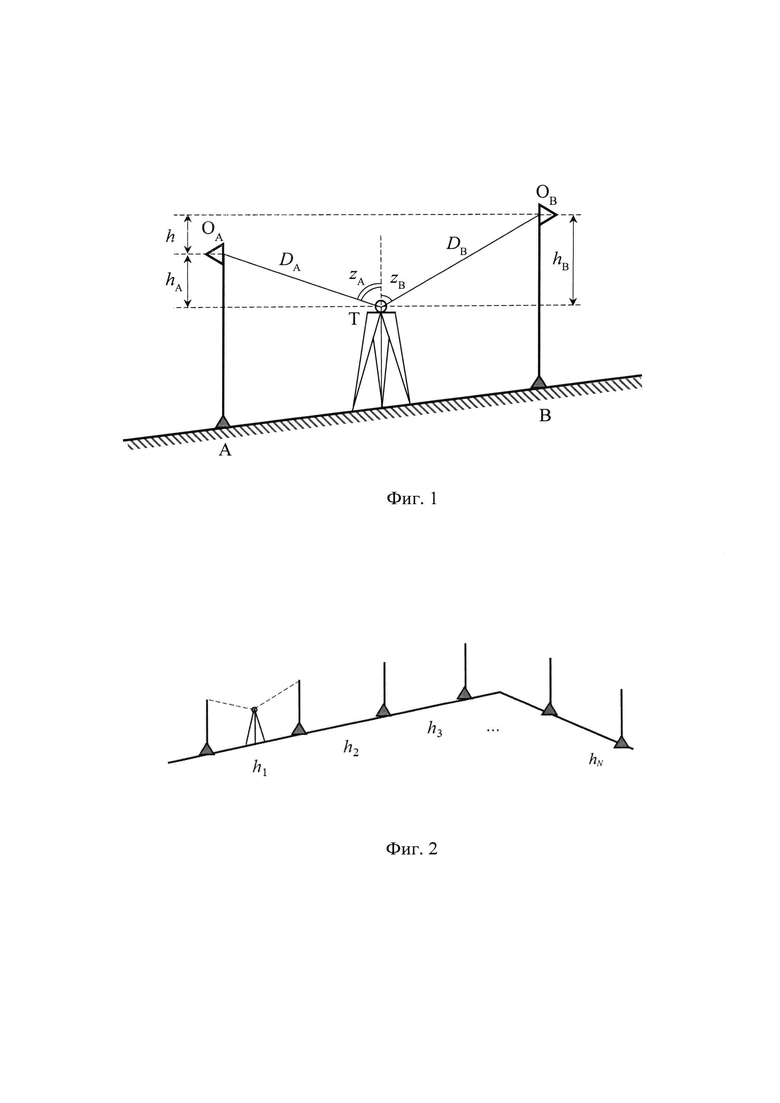
В способе-аналоге выполняют тригонометрическое нивелирование с использованием лазерного электронного тахеометра - геодезического прибора, представляющего собой сочетание лазерного дальномера и теодолита. В способе-аналоге при помощи встроенного лазерного импульсного или фазового дальномера измеряют наклонные дальности до отражателей лазерного излучения, устанавливаемых над точками земной поверхности, между которыми определяется разность высот (превышение). Далее в тахеометре измеряют угловые зенитные расстояния до центров отражателей, затем рассчитывают значения превышения на основе полученных измерительных данных. Проведение измерений данным способом поясняет схема размещения лазерного тахеометра и отражателей лазерного луча (Фиг. 1).
Способ-аналог предполагает выполнение следующих основных операций.
1. Размещают в точках А и В, между которыми требуется измерить разность высот  равновысотные штативы с отражателями лазерного излучения и устанавливают посередине между ними тахеометр Т на штативе.
равновысотные штативы с отражателями лазерного излучения и устанавливают посередине между ними тахеометр Т на штативе.
2. Измеряют при помощи тахеометра наклонные дальности  и
и  до отражателей
до отражателей  и
и  размещенных на штативах позади и впереди тахеометра (над точками А и В соответственно).
размещенных на штативах позади и впереди тахеометра (над точками А и В соответственно).
3. Измеряют при помощи тахеометра зенитные расстояния  и
и  соответственно, между направлением «в-зенит» и направлением на отражатели лазерных лучей
соответственно, между направлением «в-зенит» и направлением на отражатели лазерных лучей  и
и 
4. Вычисляют превышение h между точками А и В по формуле [2]:

При необходимости измерений превышения между точками, удаленными на большие расстояния, а также в условиях, когда на дистанции между крайними точками нет прямой видимости, применяется нивелирный ход - последовательные измерения превышений между промежуточными точками (Фиг. 2) и вычисления искомого превышения путем суммирования полученных данных с учетом соответствующих поправок [2].
Погрешность определения разности высот способом-аналогом при расстоянии между двумя измерительными точками до 1 км не превышает 10-20 мм, а при расстоянии 8-12 км - (50-70) мм [1]. При увеличении расстояния погрешность возрастает в связи с увеличением количества измерений и может стать недопустимо большой. Допуская, что среднеквадратические погрешности N измерений вдоль нивелирного хода равноточны и равны  формулу для результирующей погрешности определения разности высот получим в виде:
формулу для результирующей погрешности определения разности высот получим в виде: 
При длине нивелирного хода 100 километров необходимо сделать примерно 10 последовательных измерений. Считая погрешность каждого измерения случайной, независимой и равной  , легко подсчитать, что результирующая погрешность будет равна:
, легко подсчитать, что результирующая погрешность будет равна:  Эта погрешность недопустима при выполнении целого ряда геодезических работ.
Эта погрешность недопустима при выполнении целого ряда геодезических работ.
Поскольку на одно измерение вдоль нивелирного хода при расстоянии между измерительными точками 10 км затрачивается примерно один рабочий день, то на нивелирный ход длиной 100 км потребуется 10 рабочих дней. Поэтому оперативность способа - аналога оценивается как низкая.
Таким образом, недостатками способа-аналога является низкая точность и низкая оперативность при большой длине нивелирного хода. Низкая точность связана с накоплением погрешности измерений разности высот при большой длине нивелирного хода в отсутствие прямой видимости между крайними точками нивелирного хода. Низкая оперативность объясняется большими затратами времени при большом количестве шагов при длинных нивелирных ходах.
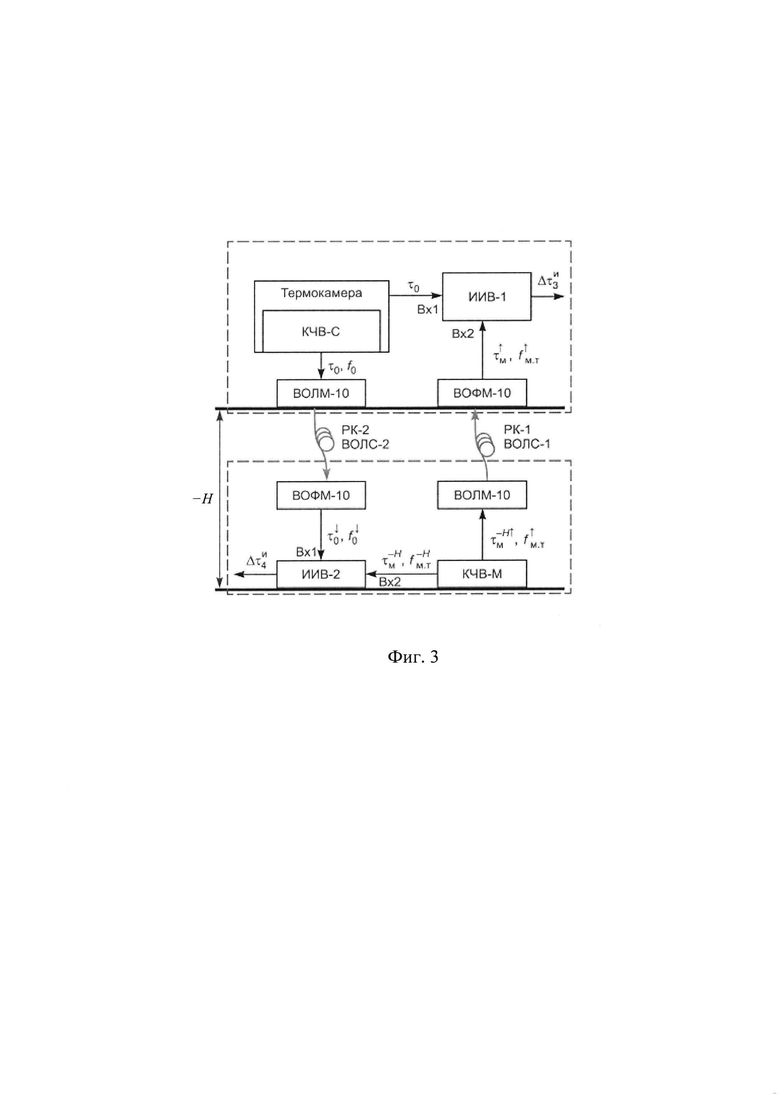
Прототипом предлагаемого способа является способ, описанный в работе [3]. Способ-прототип основан на измерении эффекта гравитационного замедления времени и эффекта гравитационного смещения частоты с помощью дуплексного наземного квантового нивелира. При реализации способа-прототипа используются (Фиг. 3): квантовые часы водородные стационарные КЧВ-С, квантовые часы водородные мобильные КЧВ-М, которые могут размещаться на разных высотах, измерители интервалов времени ИИВ-1 и ИИВ-2, а также радиоканалы РК-1 и РК-2, которые могут быть реализованы на основе радиокабельных линий, а также на основе волоконно-оптических линий связи ВОЛС-1 и ВОЛС-2, которые могут быть в виде разматываемых катушек и волоконно-оптических лазерных и фотоприемных модулей ВОЛМ-10 и ВОФМ-10 соответственно.
Для пояснения способа-прототипа обозначим через τ0, τм шкалы времени (НТВ) стационарных (базовых) и мобильных квантовых часов - ШВ-0 и ШВ-М, соответственно [3]. Эти шкалы времени реализованы в виде последовательности импульсов частотой 1 Гц, сформированной путем деления частот задающих генераторов используемых часов на необходимое число раз. Начальную взаимную относительную техническую расстройку частот следования импульсных последовательностей ШВ-0 и ШВ-М 
 представим в виде отношения:
представим в виде отношения:

где индекс «мт» («мобильные, техническая») обозначает начальную расстройку частот, вызванную техническим несовершенством задающих генераторов мобильных квантовых часов или специально введенной начальной частотной расстройкой.
При условии, что используемые часы в достаточной степени термостабилизированы, влиянием изменений температуры на интервале измерений можно пренебречь. Влиянием нестабильности частот задающих генераторов на интервале измерения также пренебрегаем. При этом шкалы времени мобильных и стационарных часов в виде последовательности импульсов частотой 1 Гц связаны следующим релятивистским соотношением [4]:

где  - начальное расхождение по времени одноименных секундных меток шкал
- начальное расхождение по времени одноименных секундных меток шкал  на момент их взаимной калибровки;
на момент их взаимной калибровки;
 - интервал текущего времени относительно начального момента времени
- интервал текущего времени относительно начального момента времени 
 - коэффициент начальной (технической) относительной расстройки частот следования импульсов шкал времени мобильных и базовых часов, соответствующий нулевой разности их высот;
- коэффициент начальной (технической) относительной расстройки частот следования импульсов шкал времени мобильных и базовых часов, соответствующий нулевой разности их высот;
 - относительная расстройка частот последовательностей импульсов обеих шкал времени, соответствующая относительной расстройке частот задающих генераторов обоих часов, вызванная гравитационным смещением частоты вследствие ненулевой разности высот размещения квантовых часов или распространением импульсов шкал времени по высоте вдоль радиоканала или ВОЛС.
- относительная расстройка частот последовательностей импульсов обеих шкал времени, соответствующая относительной расстройке частот задающих генераторов обоих часов, вызванная гравитационным смещением частоты вследствие ненулевой разности высот размещения квантовых часов или распространением импульсов шкал времени по высоте вдоль радиоканала или ВОЛС.
Способ-прототип, реализуемый в квантовом нивелире на основе ВОЛС и стандартов частоты и времени, включает следующие операции:
1. Взаимно калибруют квантовые стандарты частоты и времени КЧВ-С и КЧВ-М по времени и частоте. Для этого оба стандарта устанавливают рядом на нулевой высоте, т.е. при Н=0 (Фиг. 3). При этом гравитационное смещение начальной разности частот в силу нулевой разности высот часов отсутствует, т.е.  . На оба входа ИИВ-1, расположенного на этой же высоте, подаются импульсные последовательности шкал времени
. На оба входа ИИВ-1, расположенного на этой же высоте, подаются импульсные последовательности шкал времени  частотой около 1 Гц. С учетом формулы (3) две измеряемые разности шкал времени на выходе ИИВ-1
частотой около 1 Гц. С учетом формулы (3) две измеряемые разности шкал времени на выходе ИИВ-1  соответствующие начальному моменту при
соответствующие начальному моменту при  и моменту времени окончания интервала калибровки
и моменту времени окончания интервала калибровки  , составят:
, составят:

2. Определяют из формулы (4) коэффициент начальной относительной расстройки стандартов по частоте:

3. Перемещают КЧВ-М в точку измерений на высоту «-Н» (Фиг. 3).
4. Соединяют входы-выходы радиоканалов ВОЛС-1 (РК-1) и ВОЛС-2 (РК-2) с соответствующими выходами часов и входами ИИВ-1, ИИВ-2 в соответствии с Фиг. 3. С учетом формулы (3) шкала КЧВ-М в точке на высоте «-Н» определяется формулой:

где g - ускорение свободного падения в точке измерений.
5. Подают последовательность секундных импульсов шкалы  КЧВ-М на вход Вх.2 ИИВ-1 через цепь: ВОЛМ-10, ВОЛС-1(РК-1), ВОФМ-10.
КЧВ-М на вход Вх.2 ИИВ-1 через цепь: ВОЛМ-10, ВОЛС-1(РК-1), ВОФМ-10.
6. Измеряют с помощью ИИВ-1 разность показаний шкал времени  (стрелка показывает, что сигнал пришел «снизу вверх») и
(стрелка показывает, что сигнал пришел «снизу вверх») и  от КЧВ-С, которое определяет третий измеряемый интервал
от КЧВ-С, которое определяет третий измеряемый интервал 

где  - задержка импульсов на трассе распространения «вверх».
- задержка импульсов на трассе распространения «вверх».
7. Подают одновременно на вход Вх.2 ИИВ-2 (Фиг. 3) последовательность импульсов шкалы времени  определяемой формулой (6), а на вход Bx.1 ИИВ-2 - импульсную последовательность шкалы времени
определяемой формулой (6), а на вход Bx.1 ИИВ-2 - импульсную последовательность шкалы времени  прошедшую через ВОЛС-2 (РК-2). Эта шкала времени обозначается
прошедшую через ВОЛС-2 (РК-2). Эта шкала времени обозначается  (стрелка обозначает распространение импульсов «вниз») и определяется соотношением:
(стрелка обозначает распространение импульсов «вниз») и определяется соотношением:

где  - задержка импульсов на трассе в ВОЛС-2 «вниз».
- задержка импульсов на трассе в ВОЛС-2 «вниз».
8. Измеряют с помощью ИИВ-2 разность показаний шкал времени, подаваемых на его входы:  Тогда измеряемый интервал времени на выходе ИИВ-2
Тогда измеряемый интервал времени на выходе ИИВ-2  составляет:
составляет:

9. Вычисляют по результатам измерений искомую разность высот. Для этого определяют сумму  , учитывают формулу (4) в виде
, учитывают формулу (4) в виде  а также принимают, что для двух рядом расположенных ВОЛС-1 и ВОЛС-2 можно принять:
а также принимают, что для двух рядом расположенных ВОЛС-1 и ВОЛС-2 можно принять: 
В результате получают искомый результат:

откуда следует выражение для оценки среднеквадратической погрешности определения высоты в способе-прототипе:

Известно устройство-прототип для реализации способа-прототипа, приведенное в работе [3]. Составными элементами устройства-прототипа (дуплексного наземного квантового нивелира) являются:
радиоканалы РК-1 и РК-2, реализованные с помощью катушек оптического волокна ВОЛС-1 и ВОЛС-2 соответственно;
волоконно-оптические лазерные модулирующие модули ВОЛМ-10-1 и ВОЛМ-10-2;
волоконно-оптические фотоприемные модули ВОЛС-1 и ВОЛС-2;
квантовые часы водородные стационарные КЧВ-С;
квантовые часы водородные мобильные КЧВ-М;
измерители интервалов времени ИИВ-1 и ИИВ-2, каждый из которых имеет два входа: Вх.1 и Вх.2;
вычислитель с двумя входами: Вх.1 и Вх.2.
Выход КЧВ-С подключен к Вх.1 ИИВ-1 и через ВОЛМ-10-2, через радиоканал РК-2, реализованный с помощью катушки ВОЛС-2, через ВОЛМ-10-2 подключен к Вх.1 ИИВ-2. Выход КЧВ-М подключен к Вх.2 ИИВ-2 и через ВОЛМ-10-1, через радиоканал РК-1, реализованный с помощью катушки ВОЛС-1, через ВОЛМ-10-1 подключен к Вх.2 ИИВ-1. Выход ИИВ-2 подключен к Вх.1 вычислителя, выход ИИВ-1 подключен к Вх.2 вычислителя.
Оценим погрешность и оперативность измерений в способе-прототипе и устройстве-прототипе. Полагая все измерения интервалов времени равноточными с погрешностями, равными  формулу (11) приводим к виду:
формулу (11) приводим к виду:

где отношение  определяется нестабильностью используемых квантовых часов на заданном интервале времени
определяется нестабильностью используемых квантовых часов на заданном интервале времени  . При
. При  а также при суточной
а также при суточной  нестабильности Российских перебазируемых водородных квантовых часов, изготовленных ЗАО «Время-Ч»,
нестабильности Российских перебазируемых водородных квантовых часов, изготовленных ЗАО «Время-Ч»,  из (12) получаем:
из (12) получаем: 
Как видно из (12), величина погрешности обратно пропорциональна интервалу времени накопления эффекта  Поэтому возможно снижение погрешности в 2-3 раза за счет увеличения интервала накопления до 3 суток. Тогда погрешность способа-прототипа составит примерно 1300 мм (1,3 м).
Поэтому возможно снижение погрешности в 2-3 раза за счет увеличения интервала накопления до 3 суток. Тогда погрешность способа-прототипа составит примерно 1300 мм (1,3 м).
Реализация полевых измерений требует прокладки ВОЛС между измерительными точками. Механизированная прокладка временного оптического кабеля по поверхности земли даже по подготовленным дорогам на расстояние до 20 км потребует до 2 дней. Учитывая время на прокладку кабеля до 2 рабочих дня, проведение подготовительных мероприятий в течение 1 рабочего дня, а также необходимый интервал накопления измерений 3 суток, оперативность проведения одного геодезического измерения в способе-прототипе оценивается в 6 суток.
Недостатками способа-прототипа, использующего эффект замедления времени в гравитационном поле, и реализованного на основе высокостабильных квантовых часов и двух ВОЛС, является низкая точность и низкая оперативность измерений.
Техническим результатом, получаемым от внедрения изобретения, является повышение точности и оперативности измерений разности гравитационных потенциалов и ортометрических высот.
Изобретение поясняется чертежами.
На Фиг. 1 приведена схема измерений, применяемая в способе определения разности высот (превышений) точек на поверхности Земли тригонометрическим нивелированием с использованием электронного тахеометра (способ-аналог), где А, В - точки установки равновысотных штативов, на которых установлены отражатели лазерного излучения  и
и  Т - лазерный тахеометр.
Т - лазерный тахеометр.
На Фиг. 2 приведена схема нивелирного хода при тригонометрическом нивелировании, поясняющая способ-аналог.
На Фиг. 3 приведена схема устройства-прототипа, реализующего способ измерения параметров гравитационного поля Земли с помощью дуплексного наземного квантового нивелира.
На Фиг. 4 представлена схема, поясняющая способ на основе двух катушек оптического волокна с односторонней передачей измерительного сигнала от лазера.
На Фиг. 5 представлена схема размещения плоскости контура намотки волокна в катушках при полевых измерениях.
На Фиг. 6 представлена схема устройства, реализующего способ измерения параметров гравитационного поля Земли с помощью катушек оптического волокна.
Предлагаемый способ основан на использовании эффекта гравитационной задержки световых волн в гравитационном поле Земли. При этом в качестве источника световых волн используется лазер, оптическое излучение с которого подается на две волоконно-оптические линии связи - ВОЛС-1 и ВОЛС-2, каждая из которых включает катушку длинномерного оптического волокна, соответственно К1 и К2, обеспечивающие накопление эффекта гравитационной задержки световой волны (Фиг. 4). Катушки волокна размещаются в точках, между которыми требуется определить разность ортометрических высот  При этом фазовый набег световой волны, распространяющейся в катушке, зависит от гравитационного потенциала в точке ее размещения. Прошедшие по волоконно-оптическим линиям связи световые волны поступают на вход фотоприемника, регистрирующего разность фаз световых волн. На основе данных о разности фаз принятых фотоприемником световых волн с учетом предварительно определенных фазовых калибровочных поправок вычисляется разность гравитационных потенциалов и соответствующая разность ортометрических высот размещения катушек оптического волокна.
При этом фазовый набег световой волны, распространяющейся в катушке, зависит от гравитационного потенциала в точке ее размещения. Прошедшие по волоконно-оптическим линиям связи световые волны поступают на вход фотоприемника, регистрирующего разность фаз световых волн. На основе данных о разности фаз принятых фотоприемником световых волн с учетом предварительно определенных фазовых калибровочных поправок вычисляется разность гравитационных потенциалов и соответствующая разность ортометрических высот размещения катушек оптического волокна.
Предлагаемый способ реализуется с помощью следующих операций.
1. Термостатируют катушки К1 и К2 перед началом измерений в специальных мобильных термостатах. Для частичного подавления эффекта гироскопического фазового эффекта в катушках использую бифилярную намотку оптических волокон на обеих катушках.
2. Проводят начальную взаимную калибровку разности фаз оптических лучей в обеих термостатированных катушках К1 и К2 с погрешностью до 10-6 рад. Для этого размещают лазер, обе катушки и фотоприемник в одной пространственной точке, в которой разность ортометрических высот катушек равна нулю (т.е. h=o). Подают лазерное излучение одновременно на входы катушек К1 и К2, принимают оба лазерных луча фотоприемником и измеряют разность фаз этих лучей. Эту разность фаз принимают за калибровочное значение и используют в качестве фазового смещения в дальнейших операциях.
3. Минимизируют калибровочное фазовое смещение лазерных лучей в К1 и К2 с помощью вводимой регулируемой оптической задержки или волоконно-оптических фазовращателей в одну или обе катушки К1 или К2 с погрешностью 10-6 рад.
4. Минимизируют калибровочное фазовое смещение лазерных лучей в К1 и К2 до значения 10-6 рад искусственным введением разности температур между термостатами катушек К1 и К2.
5. Проводят взаимную начальную калибровку оптических путей ВОЛС-1 и ВОЛС-2. Для этого соединяют напрямую оптические волокна двух используемых ВОЛС с выхода лазера на вход фотоприемника, исключив из схемы измерений катушки К1 и К2. Далее измеряют разность фаз, которое принимают за калибровочное значение и используют в дальнейших операциях.
6. Минимизируют калибровочное фазовое смещение лазерных лучей в ВОЛС-1 и ВОЛС-2 с погрешностью 10-6 рад с помощью вводимой регулируемой оптической задержки или волоконно-оптических фазовращателей в одну или обе ВОЛС.
7. Минимизируют влияние гироскопического эффекта в катушках. Для этого размещают оси намотки обеих катушек во время полевых измерений по линии «восток-запад» (т.е. вдоль векторов  и
и  ) (Фиг. 5). При этом плоскости контуров намотки перпендикулярны поверхности Земли.
) (Фиг. 5). При этом плоскости контуров намотки перпендикулярны поверхности Земли.
8. Размещают катушку К1 и лазер в первой точке измерений на геоцентрической высоте  (Фиг. 4), размещают катушку К2 и фотоприемник во второй точке измерений на геоцентрической высоте
(Фиг. 4), размещают катушку К2 и фотоприемник во второй точке измерений на геоцентрической высоте  прокладывают ВОЛС-1 и ВОЛС-2 между точками измерений, подключают катушки К1 и К2 к соответствующим ВОЛС, подают оптическое излучение от лазера на ВОЛС-1 и ВОЛС-2, регистрируют на фотоприемнике разность фаз световых волн, прошедших через ВОЛС с соответствующими катушками волокна.
прокладывают ВОЛС-1 и ВОЛС-2 между точками измерений, подключают катушки К1 и К2 к соответствующим ВОЛС, подают оптическое излучение от лазера на ВОЛС-1 и ВОЛС-2, регистрируют на фотоприемнике разность фаз световых волн, прошедших через ВОЛС с соответствующими катушками волокна.
9. Вычисляют разность ортометрических высот h и разность гравитационных потенциалов  в точках 1 и 2 размещения катушек по формулам:
в точках 1 и 2 размещения катушек по формулам:
где  - измеряемая разность фаз, несущая информацию о разности высот двух катушек при одностороннем распространении лазерных лучей в обеих ВОЛС; стрелка
- измеряемая разность фаз, несущая информацию о разности высот двух катушек при одностороннем распространении лазерных лучей в обеих ВОЛС; стрелка  обозначает распространение оптического сигнала в обеих ВОЛС в одну сторону, в данном случае «вверх»; с - скорость света; ω - частота лазерного излучения;
обозначает распространение оптического сигнала в обеих ВОЛС в одну сторону, в данном случае «вверх»; с - скорость света; ω - частота лазерного излучения;  - оптический путь световой волны в катушке волокна, определяемый перед началом измерений путем дополнительной специальной калибровки (например, с помощью лазерного дальномера); g1 - ускорение свободного падения (на высоте ρ1);
- оптический путь световой волны в катушке волокна, определяемый перед началом измерений путем дополнительной специальной калибровки (например, с помощью лазерного дальномера); g1 - ускорение свободного падения (на высоте ρ1);  - центробежное ускорение в точке размещения катушки К1;
- центробежное ускорение в точке размещения катушки К1;  - геоцентрическая широта размещения катушки ВОЛС;
- геоцентрическая широта размещения катушки ВОЛС;  - вектор угловой скорости Земли.
- вектор угловой скорости Земли.
На Фиг. 6 представлено устройство для реализации предлагаемого способа. Составными элементами устройства для реализации предлагаемого способа являются:
1 - волоконно-оптическая линия связи ВОЛС-1;
2 - регулятор оптической длины ВОЛС-1;
3 - волоконно-оптическая линия связи ВОЛС-2;
4 - регулятор оптической длины ВОЛС-2;
5 - катушка оптического волокна с бифилярной намоткой волокна К1;
6 - термостат катушки оптического волокна К1;
7 - регулятор оптической длины катушки оптического волокна К1;
8 - катушка оптического волокна с бифилярной намоткой волокна К2;
9 - термостат катушки оптического волокна К2;
10 - регулятор оптической длины катушки оптического волокна К2;
11 - лазер;
12 - оптический делитель лазерного луча с двумя выходами: Вых. 1 и Вых. 2;
13 - устройство для объединения лазерных лучей с выходов ВОЛС-1 и ВОЛС-2;
14 - фотоприемник;
15 - вычислитель.
При этом выход лазера (11) подключен через два выхода Вых.1 и Вых. 2 оптического делителя (12), соответственно, к оптическому входу ВОЛС-1 (1) и оптическому входу ВОЛС-2 (3). Оптические выходы ВОЛС-1 (1) и ВОЛС-2 (3) через устройство объединения лазерных лучей (13) оптически подключены к фотоприемнику (14), а выход фотоприемника (14) подключен к вычислителю (15). Регулятор оптической длины ВОЛС-1 (2) механически закреплен на ВОЛС-1 (1), катушка оптического волокна К1 (5) включена в разрыв ВОЛС-1 (1), на ней закреплен регулятор оптической длины катушки оптического волокна К1 (7), катушка (5) с регулятором оптической длины (7) помещены в термостат (6). Регулятор оптической длины ВОЛС-2 (4) механически закреплен на ВОЛС-2 (3), катушка оптического волокна К2 (8) включена в разрыв ВОЛС-2 (3), на ней закреплен регулятор оптической длины катушки оптического волокна К2 (10), катушка (8) с регулятором оптической длины (10) помещены в термостат (9). Регуляторы оптической длины оптического волокна (2), (4), (7), (10) выполняются в виде регулируемых оптических линий задержки или волоконно-оптических фазовращателей. Для борьбы с фазовым гироскопическим эффектом в катушках К1 и К2 используется бифилярная намотка оптического волокна на катушки.
Погрешность определения разности высот определим на основе дифференцирования формулы (13):

Оценим величину числителя и знаменателя правой части этого соотношения. Из (13) определим величину измеряемого фазового смещения на выходе фотоприемника при измерении разности высот:

Оценку величины этого гравитационного фазового смещения проведем при следующих исходных данных: 

 . Длину волны лазерного излучения выберем равной λ=1300 нм, поскольку при этом обеспечивается минимальное затухание в волокне. Этой длине волны соответствуют собственные циклическая и круговая частоты излучения:
. Длину волны лазерного излучения выберем равной λ=1300 нм, поскольку при этом обеспечивается минимальное затухание в волокне. Этой длине волны соответствуют собственные циклическая и круговая частоты излучения: 
 . Кроме того, при оценках пренебрегаем центробежным ускорением, поскольку даже на экваторе его влияние на три порядка меньше, чем влияние гравитационного ускорения (см. выражение в скобках в формуле (13)). В результате из формулы (15) имеем:
. Кроме того, при оценках пренебрегаем центробежным ускорением, поскольку даже на экваторе его влияние на три порядка меньше, чем влияние гравитационного ускорения (см. выражение в скобках в формуле (13)). В результате из формулы (15) имеем: 
Чтобы определить случайную погрешность измерений  зададимся случайной среднеквадратической погрешностью всех измерений фазовых смещений примерно 10-6 рад. С учетом погрешностей проведенных ранее калибровок, каждая из которых не превышает 10-6 рад суммарную случайную погрешность измерений получим равной
зададимся случайной среднеквадратической погрешностью всех измерений фазовых смещений примерно 10-6 рад. С учетом погрешностей проведенных ранее калибровок, каждая из которых не превышает 10-6 рад суммарную случайную погрешность измерений получим равной  Учитывая, что
Учитывая, что  из формулы (14) находим погрешности определения разности ортометрических высот и разности потенциалов гравитационного поля Земли между точками размещения катушек К2 и К1:
из формулы (14) находим погрешности определения разности ортометрических высот и разности потенциалов гравитационного поля Земли между точками размещения катушек К2 и К1:
что соответствует вполне востребованным характеристикам практических геодезических измерений.
По сравнению с погрешностью определения разности высот в способе-прототипе (1300 мм) выигрыш в точности составляет 130 раз.
Оперативность измерений в предлагаемом способе оценим затратами времени на одно измерение. Все подготовительные операции по калибровке устройства и по подготовке его к измерениям возможно провести в течение одного рабочего дня. Прокладку временного ВОЛС-кабеля по поверхности земли, как и в способе-прототипе, механизированным способом на расстояние 20 км можно выполнить за два рабочих дня. В результате оперативность оценивается в 3 рабочих дня, против 6 дней в способе-прототипе.
Таким образом, точность предлагаемого способа по сравнению со способом-прототипом повышена в 130 раз. Оперативность проведения одного измерения в предлагаемом способе по сравнению со способом-прототипом повышена в 2 раза (3 рабочих дня против 6 дней).
В целом, предлагаемый способ и устройство его реализующее обеспечивают достижение поставленного технического результата.
Реализация способа возможна при использовании лазеров с относительной нестабильностью частоты 10-10-10-11, что соответствует современным достижениям лазерной техники.
Предлагаемый способ и устройство на основе использования катушек ВОЛС обладает следующими преимуществами перед классическими геодезическими лазерными нивелирами:
- высокая дальность действия, ограниченная только наличием пары оптических волокон в ВОЛС необходимой длины. При современном уровне развития ВОЛС дальность действия может составлять сотни и даже тысячи километров;
- высокой точностью, которая слабо зависит от расстояния;
- простотой конструкции по сравнению с другими типами радиочастотных квантовых нивелиров (например, [1-3]), поскольку не требует наличия сверхстабильных СЧВ.
Литература к описанию заявки
1. Никонов А.В., Рахымбердина М.Е. Исследование точности измерения превышений электронным тахеометром высокой точности в полевых условиях // Вестник Сибирской Государственной геодезической академии №1(21). 2013. С. 16-26.
2. Пискунов М.Е. Методика геодезических наблюдений за деформациями сооружений. - М.: Недра, 1980. - 248 с.
3. Фатеев В.Ф., Смирнов Ф.Р., Донченко С.С. Измерение эффекта гравитационного замедления времени дуплексным наземным квантовым нивелиром // Измерительная техника. 2022. №2. С. 22-27.
Пояснения к физическим основам предлагаемого способа
Введение
Известны теоретические и экспериментальные исследования радиочастотных квантовых нивелиров (радиочастотных гравипотенциометров), предназначенных для измерения разности гравитационных потенциалов и соответствующей разности ортометрических высот точек, разнесенных по поверхности Земли [например, 1-3]. Основой таких измерительных комплексов являются стационарные и перевозимые стандарты частоты и времени (СЧВ) со сверхвысокой стабильностью (до 10-17-10-18), а также линии сверхточного сличения шкал времени СЧВ с погрешностью до единиц-десятков пикосекунд. Использование СЧВ с относительной нестабильностью 10-17 способно обеспечить измерение разности ортометрических высот до 10 см, а при нестабильности 10-18 - до 1 см. Вместе с тем, создание и поддержание высоких характеристик таких измерительных комплексов представляет серьезную научно-техническую проблему, которая не решена до сих пор.
В этой связи представляют интерес исследования по измерению параметров гравитационного поля на основе использования эффекта гравитационной задержки электромагнитной волны в длинной оптической линии. Использование этого эффекта принципиально не требует применения сверхстабильных СЧВ и сверхточных линий синхронизации.
Существование эффекта задержки следует из общей теории относительности. Если гравитационное поле создается сферической симметричной постоянной массой (например, Землей, Луной, Солнцем и т.д.), то квадрат пространственно-временного интервала для рассматриваемого случая представляется в виде решения Шварцшильда [4, 5]:

где  - гравитационный потенциал поля; μ - планетоцентрическая гравитационная постоянная (для Земли
- гравитационный потенциал поля; μ - планетоцентрическая гравитационная постоянная (для Земли  ); ρ - расстояние от центра тела до рассматриваемой точки поля; с - скорость света в вакууме; dx, dy, dz - дифференциалы пространственных координат; dt - интервал так называемого координатного времени. Для случая распространения электромагнитной волны в гравитационном поле, когда
); ρ - расстояние от центра тела до рассматриваемой точки поля; с - скорость света в вакууме; dx, dy, dz - дифференциалы пространственных координат; dt - интервал так называемого координатного времени. Для случая распространения электромагнитной волны в гравитационном поле, когда  отсюда следует выражение для интервала координатного времени распространения волны между точками, расположенными на расстоянии
отсюда следует выражение для интервала координатного времени распространения волны между точками, расположенными на расстоянии  :
:

где  - эффективный коэффициент преломления постоянного гравитационного поля в вакууме [4, 5]. Поэтому дополнительная гравитационная задержка распространения электромагнитной волны на трассе длиной R между точками поля с планетоцентрическими высотами
- эффективный коэффициент преломления постоянного гравитационного поля в вакууме [4, 5]. Поэтому дополнительная гравитационная задержка распространения электромагнитной волны на трассе длиной R между точками поля с планетоцентрическими высотами  определяется известной формулой:
определяется известной формулой:

Причинами задержки луча в гравитационном поле является, во-первых, искривление пространства, вызывающее соответствующее удлинение пути, а во-вторых - уменьшение скорости волны в поле тяготения.
Эффект гравитационного запаздывания радиолокационных сигналов в поле тяготения Солнца впервые измерен Шапиро с ошибкой менее 10% при локации Меркурия [6]. Впоследствии в экспериментах с искусственными космическими объектами точность измерений была существенно повышена [7]. Так, использование измерительного радиоканала межпланетного КА Viking [8, 9], локация Луны с использованием уголковых отражателей программы «Аполлон» и отражателей советских луноходов [10], а также эксперимент с использованием микроволнового канала связи с КА Cassini на его пути к Сатурну [11] позволили поднять точность измерения гравитационной задержки в поле Солнца до 0,002%. Измерения этого эффекта в поле Земли не проводились.
Предлагаемая схема измерений. Предлагаемая схема комплекса измерений разности гравитационных потенциалов, основана на измерении эффекта гравитационной задержки световых волн в гравитационном поле Земли. При этом используются две световые волны, каждая из которых распространяется по своей волоконно-оптической линии связи (ВОЛС). В состав каждой ВОЛС включена катушка длинного оптического волокна, а обе катушки разнесены по геоцентрической высоте. Вследствие разных значений гравитационных потенциалов в точках размещения катушек оптического волокна гравитационная задержка световых волн, а соответственно, их фазовый набег в катушках также различаются. Эта разность фиксируется измерителем разности фаз двух световых волн на выходе фотоприемника. Схема измерений (см. Фиг. 4) включает лазер, излучающий колебания с частотой со, присоединенные к нему две волоконно-оптические линии связи (ВОЛС-1 и ВОЛС-2), в состав которых включены разнесенные по высоте h катушки волокна К1 и К2. Выходы оптических линий связи подключены к фотоприемнику ФП, на выходе которого измеряется разность фаз  оптических колебаний, снимаемых с выходов ВОЛС. Длина оптического волокна в современных компактных катушках оптического волокна может достигать 100 километров и более.
оптических колебаний, снимаемых с выходов ВОЛС. Длина оптического волокна в современных компактных катушках оптического волокна может достигать 100 километров и более.
Основные релятивистские соотношения. Фазовые эффекты распространения оптических волн в неподвижных относительно Земли ВОЛС рассмотрим в системе отсчета ITRS, вращающейся вместе с Землей. При этом кроме влияния на электромагнитную волну гравитационного поля Земли, учитывается влияние полей инерции, наведенных вращением Земли (потенциалов центробежных сил, а также гироскопических эффектов). Приливные гравитационные потенциалы Луны и Солнца пока не учитываем.
Приращение фазы световой волны в световоде, находящемся в постоянном гравитационном поле, определим из соотношения [12]:

где  - дифференциал координатного времени и координатная частота лазерного излучения, соответственно; с - скорость света в вакууме;
- дифференциал координатного времени и координатная частота лазерного излучения, соответственно; с - скорость света в вакууме;  - дифференциал расстояния вдоль трассы распространения волны;
- дифференциал расстояния вдоль трассы распространения волны;  - эффективный коэффициент преломления световода в гравитационном поле Земли и в поле вращающейся системы отсчета ITRS, который в пренебрежении эффектами порядка 1/c3, определяется формулой [12, 13]:
- эффективный коэффициент преломления световода в гравитационном поле Земли и в поле вращающейся системы отсчета ITRS, который в пренебрежении эффектами порядка 1/c3, определяется формулой [12, 13]:

Здесь  - угловая скорость Земли;
- угловая скорость Земли;  - текущий радиус-вектор и орт волны, распространяющейся в ВОЛС; ϕ - гравитационный потенциал Земли;
- текущий радиус-вектор и орт волны, распространяющейся в ВОЛС; ϕ - гравитационный потенциал Земли;  - коэффициент преломления оптического волокна на выбранной частоте лазера. Второй член в фигурной скобке определяет рассмотренную выше гравитационную задержку в поле тяготения Земли, третий и четвертый члены - задержку, вызванную центробежным потенциалом во вращающейся системе ITRS. Последний член определяет гироскопическую задержку световой волны, неизбежно возникающую в кольцевых катушках оптического волокна, находящихся на поверхности вращающейся Земли.
- коэффициент преломления оптического волокна на выбранной частоте лазера. Второй член в фигурной скобке определяет рассмотренную выше гравитационную задержку в поле тяготения Земли, третий и четвертый члены - задержку, вызванную центробежным потенциалом во вращающейся системе ITRS. Последний член определяет гироскопическую задержку световой волны, неизбежно возникающую в кольцевых катушках оптического волокна, находящихся на поверхности вращающейся Земли.
Используя предыдущие соотношения, определим фазу волны на трассе распространения от излучателя (лазера) до входа фотоприемника. При этом условимся, что индекс  обозначает соответствующие волны 1 и 2; длины
обозначает соответствующие волны 1 и 2; длины  обозначают длину трассы распространения волн в соответствующих ВОЛС, исключая накопительные катушки К1 и К2;
обозначают длину трассы распространения волн в соответствующих ВОЛС, исключая накопительные катушки К1 и К2;  - длина ВОЛС в катушках К1 и К2. Коэффициенты преломления ВОЛС на обеих трассах распространения в ВОЛС-1 и -2 считаем разными и равными
- длина ВОЛС в катушках К1 и К2. Коэффициенты преломления ВОЛС на обеих трассах распространения в ВОЛС-1 и -2 считаем разными и равными  . В результате фазовый набег на трассах 1 и 2 составит:
. В результате фазовый набег на трассах 1 и 2 составит:

где:

- фазовый набег в ВОЛС на длине волокна  ;
;

- фазовый набег на длине волокна  в катушке ВОЛС;
в катушке ВОЛС;

- фазовый набег за счет гравитационной задержки в катушке ВОЛС длиной  . При этих вычислениях считаем катушки ВОЛС точечными объектами, поскольку их размеры существенно меньше измеряемой высоты. Поэтому вдоль трассы волны в катушке ВОЛС
. При этих вычислениях считаем катушки ВОЛС точечными объектами, поскольку их размеры существенно меньше измеряемой высоты. Поэтому вдоль трассы волны в катушке ВОЛС  далее
далее 

- фазовый набег за счет влияния центробежного потенциала вращающейся Земли в точке размещения катушек ВОЛС. Здесь  - геоцентрическая широта размещения катушки ВОЛС;
- геоцентрическая широта размещения катушки ВОЛС;

- вторая составляющая фазового набега за счет центробежного потенциала, зависящая от направления распространения волн  в катушках;
в катушках;

- фазовый набег за счет гироскопической задержки световой волны (эффект Саньяка) в катушках оптического волокна. Здесь  - вектор полной площади кольцевого контура, охватываемого волокном в катушке. Величина площади контура пропорциональна радиусу и количеству витков намотки волокна, а направление вектора перпендикулярно плоскости контура намотки. Важно отметить, что знак этой задержки зависит от направления распространения (вектора
- вектор полной площади кольцевого контура, охватываемого волокном в катушке. Величина площади контура пропорциональна радиусу и количеству витков намотки волокна, а направление вектора перпендикулярно плоскости контура намотки. Важно отметить, что знак этой задержки зависит от направления распространения (вектора  ), а величина эффекта, согласно теории волоконных гироскопов, не зависит от коэффициента преломления ВОЛС.
), а величина эффекта, согласно теории волоконных гироскопов, не зависит от коэффициента преломления ВОЛС.
На основе приведенных формул определим измеряемую разность фаз двух световых волн с индексами 2 и 1 на входе фотоприемника через разности фаз составляющих формулы (6), определяемых индексом «21»:

В этом соотношении полезным является первое слагаемое в правой части  которое определяется искомой разностью гравитационных потенциалов и ортометрических высот, и двух катушек волокна.
которое определяется искомой разностью гравитационных потенциалов и ортометрических высот, и двух катушек волокна.
Остальные фазовые смещения представляют помехи измерениям и их необходимо либо точно измерить во время калибровок и затем учесть при вычислении полезного эффекта, либо привести к минимально возможным значениям путем компенсации по результатам калибровок перед началом измерений.
Пути подавления мешающих фазовых сдвигов
Проанализируем полученную формулу (13) с точки зрения подавления мешающих фазовых смещений путем их калибровок.
1. Первую составляющую выражения (13), определяющую фазовую задержку на линейной части трассы ВОЛС «лазер - ФП», представим на основе (7) в виде:

Эту составляющую можно откалибровать, соединив для измерений напрямую оптические волокна двух используемых ВОЛС с выхода лазера на вход фотоприемника, исключив из схемы измерений катушки К1 и К2. В результате измерений эта фазовая составляющая получает калиброванное значение, которое учитывается при последующих измерениях:

Калибровочную разность фаз (14) можно свести к минимально возможной путем введения дополнительной задержки  . Ее можно создать с помощью регулируемой оптической линии задержки или волоконно-оптического фазовращателя [например, 14]. Компенсирующая задержка
. Ее можно создать с помощью регулируемой оптической линии задержки или волоконно-оптического фазовращателя [например, 14]. Компенсирующая задержка  вводится в одну из двух оптических трасс ВОЛС «лазер-фотоприемник» и сводит разность фаз (14) к минимально возможной погрешности компенсации
вводится в одну из двух оптических трасс ВОЛС «лазер-фотоприемник» и сводит разность фаз (14) к минимально возможной погрешности компенсации  :
:

2. Рассмотрим возможность устранения влияния паразитных гироскопических фазовых набегов, вызванных вращением катушек ВОЛС вместе с Землей (слагаемые выражения (13) во второй скобке, определяемые формулами (11) и (12)):

где  - орты оптических волн 1,2 в катушках К1 и К2;
- орты оптических волн 1,2 в катушках К1 и К2;  - вектор угловой скорости Земли;
- вектор угловой скорости Земли;  - векторы суммарной площади намотки волокна в соответствующих катушках, которые всегда ортогональны плоскости намотки. Важно отметить, что первая составляющая соотношения (16), пропорциональная 1/с3, существенно меньше второй, пропорциональной 1/с2.
- векторы суммарной площади намотки волокна в соответствующих катушках, которые всегда ортогональны плоскости намотки. Важно отметить, что первая составляющая соотношения (16), пропорциональная 1/с3, существенно меньше второй, пропорциональной 1/с2.
Анализ слагаемых соотношения (16) позволяет предложить следующие пути снижения этих помеховых смещений:
а) Необходимо обеспечить ортогональность векторов  и
и  во всех точках намотки волокна на катушках во время измерений. При этом скалярное произведение этих векторов
во всех точках намотки волокна на катушках во время измерений. При этом скалярное произведение этих векторов  и все составляющие формулы (16) обращаются в нуль. Это достигается размещением оси намотки каждой катушки по линии «восток-запад» (т.е. вдоль векторов
и все составляющие формулы (16) обращаются в нуль. Это достигается размещением оси намотки каждой катушки по линии «восток-запад» (т.е. вдоль векторов  и
и  ). При этом плоскости контуров намотки перпендикулярны поверхности Земли и касательной к окружности вращения точки размещения катушки на Земле (рис 2). Векторы
). При этом плоскости контуров намотки перпендикулярны поверхности Земли и касательной к окружности вращения точки размещения катушки на Земле (рис 2). Векторы  в любой точке волокна взаимно перпендикулярны, а соотношение (16) обращается в нуль.
в любой точке волокна взаимно перпендикулярны, а соотношение (16) обращается в нуль.
б) Поскольку второе слагаемое соотношения (16) при тех же размерах катушки существенно больше первого, то для увеличения эффекта подавления гироскопического фазового эффекта (12) дополнительно предлагается использование бифилярной намотки волокна на катушку. При этом в каждой половине длины волокна каждой катушки направления распространения волн противоположны, т.е.  . При такой намотке гироскопические эффекты в каждой половине волокна одинаковы по величине и противоположны по знаку, а общий разностный гироскопический эффект снижается на несколько порядков.
. При такой намотке гироскопические эффекты в каждой половине волокна одинаковы по величине и противоположны по знаку, а общий разностный гироскопический эффект снижается на несколько порядков.
в) Наконец, окончательную калибровку условий подавления гироскопических эффектов в обеих катушках перед выходом на измерения можно провести на вращающемся столе. При этом окончательно выставляются углы ориентации плоскостей обеих катушек для достижения условия подавления мешающих гироскопических эффектов с фазовой погрешностью 
3. Проведем калибровку разностного фазового набега на длине волокон в двух катушках волокна К1 и К2. Для этого вычислим разность фаз, определяемых суммой первого и последнего слагаемых в формуле (13) для общего случая, когда катушки волокна разнесены по высоте h:

Принимая для упрощения вычислений условия 
 на основе формул (8), (9) и (10) получаем:
на основе формул (8), (9) и (10) получаем:

где 
 - соответственно, гравитационное и центробежное ускорения в точке размещения катушки К1.
- соответственно, гравитационное и центробежное ускорения в точке размещения катушки К1.
Первое слагаемое полученного фазового сдвига зависит от разности оптических длин волокон в катушках К1 и К2, второе слагаемое - от искомой разности высот размещения этих катушек.
Чтобы исключить из дальнейших измерений влияние фазового сдвига, определяемого разностью оптических длин волокон в двух катушках, разместим обе катушки в непосредственной близости от лазерного источника на одной и той же геоцентрической высоте  что соответствует разности высот h=0. В результате соотношение (18) принимает вид:
что соответствует разности высот h=0. В результате соотношение (18) принимает вид:

Отсюда следует, что минимизация этого фазового смещения при калибровке достигается при выполнении условия равенства оптических длин обеих катушек волокна, т.е. при условии

Достичь этого калибровочного условия можно двумя путями:
- с помощью вводимой регулируемой оптической задержки или волоконно-оптических фазовращателей в одну или обе катушки К1 или К2;
- искусственным введением разности температур термостатированных катушек. После достижения условия (20) установленное значение температуры каждой катушки поддерживается термостатом.
При выполнении этих мероприятий значение калибровочной разности фаз в катушках волокна можно свести к минимальной погрешности компенсации 
Измерение разности высот и оценка ожидаемой погрешности. После проведения перечисленных калибровок разместим катушки волокон К1 и К2 оптического квантового нивелира стационарно в двух точках измерений, разнесенных на ортометрическую высоту h, в соответствии с Фиг. 4. При выполнении условия калибровки (20) соотношение (18) принимает вид:

где
 - оптический путь лазерного луча в катушке К2;
- оптический путь лазерного луча в катушке К2;  - измеряемая разность фаз, несущая информацию о разности высот двух катушек.
- измеряемая разность фаз, несущая информацию о разности высот двух катушек.
Оптический путь  определяется перед началом измерений путем дополнительной специальной калибровки с помощью лазерного дальномера. Эксперименты показывают, что погрешность измерений времени задержки лазерного луча в волокне составляет десятки пикосекунд [15], что при длине ВОЛС 100 км дает относительную погрешность измерений оптического пути 10-7-10-8. Такая точность вполне достаточна для реализации данного измерителя разности гравитационных потенциалов и высот. Другой, но менее точный, путь нахождения калиброванного значения оптического пути
определяется перед началом измерений путем дополнительной специальной калибровки с помощью лазерного дальномера. Эксперименты показывают, что погрешность измерений времени задержки лазерного луча в волокне составляет десятки пикосекунд [15], что при длине ВОЛС 100 км дает относительную погрешность измерений оптического пути 10-7-10-8. Такая точность вполне достаточна для реализации данного измерителя разности гравитационных потенциалов и высот. Другой, но менее точный, путь нахождения калиброванного значения оптического пути  состоит в определении его из формулы (21) по результатам измерений разности фаз при известной калиброванной разности высот размещения катушек.
состоит в определении его из формулы (21) по результатам измерений разности фаз при известной калиброванной разности высот размещения катушек.
Прежде чем перейти к оценке величины гравитационного фазового сдвига и точности измерений перейдем в формуле (21) от координатной частоты, рассчитываемой для точки вне гравитационного поля, к собственной, или измеряемой (истиной) частоте лазерного излучения, соответствующей точке на поверхности Земли. Как известно, собственная (измеряемая), частота лазерного излучения ω определяется через координатную частоту излучения  и гравитационный потенциал на Земле
и гравитационный потенциал на Земле  из следующего соотношения [4]:
из следующего соотношения [4]:  . Производя соответствующую замену обозначений частот, формулу (21) без потери в точности приводим к окончательному виду:
. Производя соответствующую замену обозначений частот, формулу (21) без потери в точности приводим к окончательному виду:

Отсюда находится искомая разность ортометрических высот двух катушек и соответствующая разность гравитационных потенциалов:

Оценку величины гравитационного фазового смещения (22) проведем при следующих исходных данных: 


 . Длину волны лазерного излучения выберем равной
. Длину волны лазерного излучения выберем равной  поскольку при этом обеспечивается минимальное затухание в волокне. Этой длине волны соответствуют собственные циклическая и круговая частоты излучения:
поскольку при этом обеспечивается минимальное затухание в волокне. Этой длине волны соответствуют собственные циклическая и круговая частоты излучения: 
 Кроме того, при оценках пренебрегаем центробежным ускорением, поскольку даже на экваторе его влияние на три порядка меньше, чем влияние гравитационного ускорения (см. выражение в скобках в формуле (22)). В результате из формулы (22) имеем:
Кроме того, при оценках пренебрегаем центробежным ускорением, поскольку даже на экваторе его влияние на три порядка меньше, чем влияние гравитационного ускорения (см. выражение в скобках в формуле (22)). В результате из формулы (22) имеем: 
При оценке погрешности определения разности высот по формуле (23) зададимся случайной среднеквадратической погрешностью измерений фазового смещения 10-6 рад. С учетом погрешностей проведенных ранее калибровок, каждая из которых не превышает 10-6 рад, суммарную случайную погрешность измерений примем равной  В результате, учитывая, что
В результате, учитывая, что  находим погрешности определения разности ортометрических высот и разности потенциалов гравитационного поля Земли между точками размещения катушек К2 и К1:
находим погрешности определения разности ортометрических высот и разности потенциалов гравитационного поля Земли между точками размещения катушек К2 и К1:
что соответствует вполне востребованным характеристикам практических геодезических измерений. При этом длина ВОЛС ограничена только мощностью излучения и может достигать сотен километров, а при наличии промежуточных усилителей сигнала - до нескольких тысяч километров.
Предлагаемый измерительный комплекс лазерного гравипотенциометра на основе ВОЛС обладает следующими преимуществами перед классическими геодезическими лазерными нивелирами:
- высокая дальность действия, ограниченная только наличием пары оптических волокон в ВОЛС необходимой длины. При современном уровне развития ВОЛС дальность действия может составлять сотни и даже тысячи километров;
- высокой точностью, которая слабо зависит от расстояния;
- простотой конструкции по сравнению с другими типами радиочастотных квантовых нивелиров (например, [1-3]), поскольку не требует наличия сверхстабильных СЧВ. Требуемая нестабильность лазера гравипотенциометра составляет 10-10-10-11, что практически реализуемо уже в настоящее время.
Заключение
Таким образом, эффект гравитационной задержки в гравитационном поле Земли вполне может быть измерен с помощью современного измерительного комплекса на основе лазерной волоконно-оптической фазовой системы. Такая система основана на использовании лазера и фазометра, которые соединены двумя ВОЛС, содержащими две катушки длинного оптического волокна, разнесенными по высоте. На основе такого измерительного комплекса возможно создание лазерного измерителя (гравипотенциометра), измеряющего разность гравитационных потенциалов и разность ортометрических высот двух разнесенных точек на поверхности Земли.
Лазерный фазовый гравипотенциометр на длинных ВОЛС по сравнению с другими квантовыми нивелирами, например, [1-3], обладает рядом преимуществ:
- высокой достижимой точностью измерений ортометрической высоты (погрешность – единицы, см);
- большой дальностью действия (до сотен и тысяч км);
- простотой конструкции по сравнению с радиочастотными квантовыми нивелирами, поскольку не требует наличия сверхстабильных стандартов частоты и времени. Требования к нестабильности используемых лазеров вполне соответствует современным достижениям лазерной техники.
Вместе с тем, прибор перед началом измерений требует проведения целого ряда высокоточных фазовых калибровок, в частности, калибровку оптических длин соединительных ВОЛС, калибровку разности оптических длин ВОЛС в катушках волокна, а также специальную калибровку для подавления гироскопических эффектов.
Литература к пояснению
1. Фатеев В.Ф., Жариков А.И., Сысоев В.П., Рыбаков Е.А., Смирнов Ф.Р. Об измерении разности гравитационных потенциалов Земли с помощью перевозимых квантовых часов // ДАН, 2017. Т. 472. №2.
2. Фатеев В.Ф., Смирнов Ф.Р., Донченко С.С. Измерение эффекта гравитационного замедления времени дуплексным наземным квантовым нивелиром // Измерительная техника. 2022. №2. С. 22-27. https://doi.org/10.32446/0368-1025it.2022-2-22-27.
3. Müller J., Dirkx D., Kopeikin S.M. et al. High Performance Clocks and Gravity Field Determination // Space Sci Rev. 2018. V. 214. P. 5.
4. Ландау Л.Д., Лифшиц Е.М. Теория поля, - М.: Наука, 1967, 460.
5. Фок В.А. Теория пространства, времени и тяготения. - М.: ГИФМЛ, 1961, 564 с.
6. Shapiro I.I. Fourth test of General Relativity // Physical Review Letters, 1964, v. 13, pp. 789-790.
7. Турышев В.Г. Экспериментальные проверки общей теории относительности: недавние успехи и будущие направления исследований // УФН, 2009, том 179, №1, с. 3-34.
8. Шапиро И., Резинберг Р., МкНил Р. и др. Релятивистский эксперимент «Викинг». - кн.: «Альберт Эйнштейн и теория гравитации». - М.: Наука, 1979, с. 572.
9. Shahiro I.I., Counselman С.С., King R.W. Physical Review Letters, 1976, v.36, p. 555.
10. Williams J.G., Turyshev S.G., Boggs D.H. Testing the Equivalence Principle on Ground and in Space, Italy, 2004, Sept. 20-23.
11. Bertotti В., less L., Tortora P. // Natute, 2003, v. 425, p. 374.
12. Фатеев В.Ф. Релятивистская метрология околоземного пространства-времени. - Монография. - Менделеево: ФГУП «ВНИИФТРИ», 2017, ил. 22, табл. 1, библ. 269, 439 С.
13. Фатеев В.Ф. Преломляющие свойства гравитационной сферы Земли во вращающихся системах отсчета // Электромагнитные волны и электронные системы, №5, т. 18, 2013, с. 73-82.
14. Оптические фазовращатели // https://sphotonics.ru/catalog/photonic-time-delays/.
15. Колмогоров О.В., Прохоров Д.В., Донченко С.С. Результаты разработки и исследований систем сравнения и синхронизации шкал времени пространственно удаленных эталонов, использующих волоконно-оптические линии связи. Фотон-экспресс. 2019. №6 (158). С. 83-84.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения параметров гравитационного поля с помощью квантовых часов, соединенных радиоканалами связи, и устройство для его реализации | 2022 |
|
RU2799979C1 |
| РАСПРЕДЕЛЕННАЯ ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА РЕГИСТРАЦИИ ВИБРОАКУСТИЧЕСКИХ СИГНАЛОВ | 2011 |
|
RU2485454C2 |
| Лазерный космический гравитационный градиентометр | 2021 |
|
RU2754098C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2020 |
|
RU2751052C1 |
| Способ определения угловой скорости | 1989 |
|
SU1760455A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2007 |
|
RU2340873C1 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2009 |
|
RU2421689C1 |
| МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2018 |
|
RU2708700C2 |
| Способ измерения параметров гравитационного поля Земли с помощью мобильных атомных часов и устройство для его реализации | 2021 |
|
RU2779241C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ЛИНИЯ ПЕРЕДАЧИ ИНФОРМАЦИИ (ВАРИАНТЫ) | 2010 |
|
RU2462820C2 |
Изобретение относится к измерительной технике, для измерения параметров гравитационного поля Земли (ГПЗ), разности гравитационных потенциалов и разности ортометрических высот. Способ измерения параметров гравитационного поля включает измерение разности гравитационных фазовых задержек двух оптических лучей, в двух разнесенных по высоте катушках оптического волокна. Используют две волоконно-оптические линии связи, с термостатированными катушками оптического волокна. Для измерений прокладывают обе ВОЛС между точками измерений, размещают первую катушку волокна и лазер в первой точке измерений, размещают вторую катушку и фотоприемник во второй точке измерений, подают излучение лазера на обе ВОЛС, калибруют и минимизируют разность оптических путей, минимизируют влияние гироскопического эффекта в катушках оптического волокна, размещая оси намотки волокон в обеих катушках по линии «восток-запад». Регистрируют на фотоприемнике разность фаз световых волн и вычисляют разность ортометрических высот и разность гравитационных потенциалов между точками размещения катушек оптического волокна. Технический результат - повышение точности и оперативности измерений. 2 н.п. ф-лы, 6 ил.
1. Способ измерения параметров гравитационного поля с помощью катушек оптического волокна, основанный на измерениях разности фазовых задержек световых волн, передаваемых по двум волоконно-оптическим линиям связи (ВОЛС), каждая из которых содержит одну катушку оптического волокна, отличающийся тем, что перед началом измерений термостатируют обе катушки оптического волокна в специальных мобильных термостатах, измеряют и минимизируют начальную взаимную калибровочную разность фаз оптических лучей в обеих термостатированных катушках оптического волокна, измеряют и минимизируют начальную взаимную калибровочную разность фаз оптических путей обеих ВОЛС, прокладывают обе ВОЛС между точками измерений, размещают первую катушку волокна и лазер в первой точке измерений, размещают вторую катушку и фотоприемник во второй точке измерений на измеряемой высоте относительно первой, подают оптическое излучение от лазера одновременно на обе ВОЛС, минимизируют во время полевых измерений влияние гироскопического эффекта в катушках оптического волокна, размещая оси намотки волокон в обеих катушках по линии «восток-запад», регистрируют на фотоприемнике разность фаз световых волн, прошедших через ВОЛС с катушками оптического волокна, вычисляют по результатам измерений разность ортометрических высот и разность гравитационных потенциалов между точками размещения катушек оптического волокна.
2. Устройство для осуществления способа измерения параметров гравитационного поля с помощью катушек оптического волокна, включающее две волоконно-оптические линии связи (ВОЛС), лазер и фотоприемник, отличающееся тем, что в состав измерительного оборудования каждой ВОЛС дополнительно вводят механически связанный с ней регулятор оптической длины ВОЛС, термостат с длинномерной катушкой оптического волокна, к которой присоединен регулятор оптической длины волокна в катушке; в состав устройства дополнительно вводят оптический делитель лазерного луча, оптическое устройство объединения лазерных лучей, вычислитель, причем лазер подключен к фотоприемнику через последовательно соединенные оптический делитель лазерного луча, две параллельно расположенные ВОЛС с их оборудованием и оптическое устройство объединения лазерных лучей; выход фотоприемника подключен к вычислителю; два термостата с катушками оптического волокна максимально разнесены по длине ВОЛС; в катушках используется бифилярная намотка оптического волокна.
| Способ измерений магнитного поля земли и квантовый магнитометр для реализации такого способа | 2021 |
|
RU2784201C1 |
| Способ обнаружения и регистрации гравитационных волн (варианты) и устройство для его осуществления | 2020 |
|
RU2778020C2 |
| Способ измерения параметров гравитационного поля Земли с помощью мобильных атомных часов и устройство для его реализации | 2021 |
|
RU2779241C1 |
| Рыбаков Е | |||
| А | |||
| и др | |||
| Измерение разности гравитационных потенциалов и ортометрических высот двух разнесенных точек на поверхности Земли | |||
| //Метрология времени и пространства | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| - С | |||
| Питательный кран для вагонных резервуаров воздушных тормозов | 1921 |
|
SU189A1 |
| CN 110031906 A, 19.07.2019. | |||
